基于向量自回歸模型的損傷識別方法*
2015-03-13 02:30:07劉綱,羅鈞,方鵬,秦陽
振動、測試與診斷 2015年5期
劉 綱, 羅 鈞, 方 鵬, 秦 陽
(1.重慶大學土木工程學院 重慶,400045) (2.山地城鎮建設與新技術教育部重點實驗室 重慶,400030)
?
基于向量自回歸模型的損傷識別方法*
劉 綱1,2, 羅 鈞1, 方 鵬1, 秦 陽1
(1.重慶大學土木工程學院 重慶,400045) (2.山地城鎮建設與新技術教育部重點實驗室 重慶,400030)
基于向量自回歸(vector auto-regression,簡稱VAR)模型,提出了一種能同時進行損傷定位和程度識別的時間序列方法。首先,利用測試的加速度響應時程信號建立VAR模型,提取模型系數的對角線元素作為損傷敏感向量,并采用該向量的馬氏距離作為損傷特征值;然后,應用統計模式識別手段,通過受試者工作特征曲線下的面積指標來判別損傷是否出現及其部位,并通過Bhattacharyya距離來度量損傷程度。數值模擬和實驗室框架模型實驗表明,該算法能成功識別損傷部位和損傷程度的相對大小,且具有較好的抗噪性能,為結構長期在線損傷識別提供了一種有效手段。
損傷識別; VAR模型; 受試者工作特征曲線; Bhattacharyya距離
引 言
承受荷載的結構體系在日常環境和運營荷載作用下將逐步老化或損傷。為延長結構的使用壽命,降低結構日常維護費用并預防倒塌等惡性事故的發生,業界提出了較傳統的定期維護和人工檢查更為先進合理的基于結構性能狀態的維護策略,從而促進了健康監測在土木工程中的快速發展[1-2]。
目前,基于振動的損傷識別方法已成為健康監測領域內的一個主流研究方向,可大致分為基于模態驅動的方法和基于數據驅動的方法。基于模態驅動的方法通常采用識別得到的頻率、振型等模態指標以及模態柔度、模態應變能等衍生指標識別損傷是否發生以及損傷部位,并可進一步結合模型更新等手段量化損傷程度[3-4]。目前,國內外學者已針對該類方法進行了大量研究,很多算法已在實驗室結構和小型結構上得到成功驗證或初步應用[5],但該類方法對結構局部損傷不敏感,僅在風、地脈動等環境激勵下辨識得到的模態指標的不確定性較大,大型復雜結構的基準有限元模型較難準確獲取從而限制了該類方法的應用范圍。
基于數據驅動的方法多借助于自回歸(autoregressive, 簡稱AR)、滑動自回歸、小波變換和希爾伯特黃變換等數學模型從結構響應信號中提取損傷判別指標[6-8],然后通過結構損傷前后指標的統計模式對比實現損傷識別。例如,文獻[9]采用AR模型前三階系數構建損傷判別指標并通過AR系數張成的空間構建損傷定位指標,然后通過統計檢驗的方式,成功識別了美國土木工程協會的四層鋼框架結構的損傷。文獻[10]利用某傳感器的信號作為輸出,其臨近傳感器的信號作為輸入來建立外部輸入自回歸模型,在統計分析模型預測誤差的基礎上利用Fisher準則構建損傷判別指標,通過對所有傳感器依次計算實現結構損傷部位和程度的識別,并采用格構式鋼梁驗證了該算法的有效性。文獻[11]采用自回歸-支持向量機為模型,通過損傷前后模型預測誤差的方差之比建立損傷識別指標,再通過F檢驗判定結構是否出現損傷,該算法能順利識別非線性結構的損傷,但其定位功能較弱。
基于數據驅動方法的計算速度快,能實時完成損傷識別且相對于模態方法更易應用于大型結構中[12]。損傷識別可劃分為遞進的四層次問題,即判定結構有無損傷、損傷部位、損傷程度和剩余壽命[2]。當前的時域方法多關注于判斷結構有無損傷,僅能滿足損傷識別第一層次的要求[10],或者通過各傳感器的不同組合,循環計算實現損傷部位和程度的判定,這雖然達到了損傷識別第二和第三層次的需求,但會增大計算工作量從而降低損傷識別的實時性。
針對以上不足,筆者首先利用向量自回歸模型系數矩陣的對角線元素提取新向量,采用結構損傷前后新向量的馬氏距離構造損傷識別指標;然后,基于受試者工作特征曲線下的面積和Fisher準則兩種統計手段,實現結構損傷程度和部位的判別,從而通過一次計算可同時解決損傷識別前三個層次的問題;最后,通過6自由度數值模型和實驗室兩層鋼框架實驗驗證了算法的有效性。
1 VAR時間序列模型及階數選取
1.1 VAR時間序列模型
1980年,Sims首先提出了向量自回歸模型,該模型描述了n個不同變量之間的線性演化關系,一個p階VAR模型的定義[13]為
yt=c+A1yt-1+…+Apyt-p+et
(1)
其中:yt={y1t,y2t,…,ynt}T為由n個變量組成的列向量;Ai為n×n階系數矩陣;c為插值向量,表示數據的整體偏移。
損傷識別中,數據首先會進行零均值歸一化預處理,故該項通常為零,可省略;et為誤差項,是均值為零、方差確定的向量。
經整理,式(1)可簡寫為
Y=BZ+E
(2)
其中:Y=[y1,y2,…,yT],為n×T的矩陣;T為計算數據的點數;B=[A1,A2,…,Ap],為n×np的矩陣;Z=[Z0,Z1,…,ZT-1],Zt={yt,…,yt-p+1}T為np×1的列向量;E=[e1,e2,…,eT],為n×T的矩陣。
采用最小二乘法可得式(2)中系數項B的估計為
?In)Y
(3)
向量自回歸模型能夠描述結構體系動態響應的原因在于其與結構運動方程具有較好的對應關系,簡要說明如下:對于多自由度體系,假設在離散時間點ti(ti=iΔt,Δt為采樣間隔;i=1,2,…,T),考察結構的運動方程
(4)

(5)
將式(5)代入式(4),經整理可得
(6)
將式(6)右邊中括號內的系數項分別用矩陣B1,B2和B3表示,并令k=ti+1,則式(6)可簡寫為
u(k)=B1u(k-1)+B2u(k-2)+B3Fp(k-1)
(7)
對比式(1)和(7)可知,VAR模型中的A1,A2分別與結構運動方程中的B1,B2相對應,故VAR模型在理論上與結構運動方程具有一定的一致性。當用VAR模型描述結構系統的運動時,結構剛度或阻尼的改變(B1,B2)將在VAR模型中引起系數矩陣(A1,A2)的變化,故可通過結構損傷前后VAR模型系數的改變來識別結構的損傷。
1.2 模型階數的選取
從式(7)可知,當輸入已知時,二階VAR模型能較好地擬合結構的響應,但土木結構很難人為施加激勵,故輸入項無法準確獲取。通常而言,假設結構運營環境下的輸入為白噪聲,此時可通過增大模型階數來擬合未知的輸入,但階數過大將引發過擬合現象。這一不足可通過VAR模型階數判定準則解決。筆者選取較為常用的赤池信息準則(akaike information criterion,簡稱AIC)準則,其定義[13]為
AIC(p)=ln(|Σ(p)|)+2pn2/T
(8)
其中:Σ(p)表示模型階數為p時殘差協方差矩陣。
計算不同階數下的AIC值,選取AIC值最小所對應的階數為模型的最優階數,此時VAR模型將在較小階數的情況下最好地擬合數據。
2 損傷特征指標及識別流程
2.1 損傷特征指標
當結構某處發生損傷時,該處的剛度將降低,故在形成結構總體剛度矩陣時,與該部位各自由度對應的主對角線元素和非對角線元素的值將減少,而其余各元素保持不變。對于一個自由度為n的結構體系,剛度矩陣非主對角線元素的數量是主對角線元素數量的(n-1)倍,而僅有少量元素包含損傷單元的信息,所以從提高計算效率角度出發,可僅用主對角線元素進行損傷識別。在式(6,7)中,結構剛度矩陣主對角線元素對應于B1,B2矩陣中的主對角線元素(以瑞雷阻尼假定為例,剛度矩陣的變化將引起阻尼矩陣的變化,故B2矩陣中雖無剛度項,但損傷也會引起其發生改變)。結合式(1)可知,VAR模型中系數矩陣的主對角線元素將隨結構的損傷而發生變化,因此提取VAR模型中各系數矩陣Ai(i=1,2,…,p)的主對角線元素為新向量f
(9)
新向量f的元素較多(n×p),為高維向量,采用馬氏距離對其進行降維,從而建立損傷識別特征指標MD[4]為
(10)

2.2 統計模式識別
選取受試者工作特征曲線和Fisher準則分別進行損傷部位和程度的判定。受試者工作特征曲線(receiver operating characteristic curve,簡稱ROC曲線)[14]是二次世界大戰中為評估雷達辨識目標的性能而提出的信號檢測理論。當得到結構損傷前后損傷特征指標的分布曲線并選取決定閾值后,就能確定該閾值下損傷特征指標檢測損傷的性能,如圖1所示。例如假陽性率為結構處于完好狀態但閾值的判定結果卻為損傷的概率,即誤報警率。
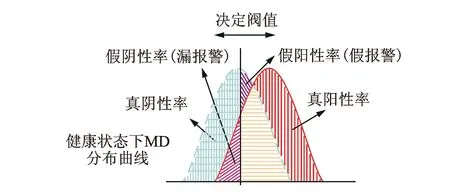
圖1 信號統計檢測Fig.1 Signal statistical detection
選取不同的閾值,將得到不同的假陽性率。為避免人為確定閾值帶來的誤差,ROC曲線是以假陽性率為橫坐標,真陽性率為縱坐標,然后在選取不同決定閾值下所做出的曲線。通常采用ROC曲線下的面積值(area under ROC curve,簡稱AUC)作為統計量來評價檢測的性能。AUC的取值在0.5~1之間。當AUC≥0.8時,表明判定結果的準確性較高;當0.7>AUC時,表明判定結果的準確性低。
通過損傷測點處MD分布的B氏距離(Bhattacharyya distance,簡稱BD)判斷損傷程度,對于單變量指標,BD定義[15]為
(11)
其中:κ和σ分別表示MD分布的平均值和方差,下標d和h分別表示損傷狀態和基準狀態。
從式(11)的定義可知,前一項主要考慮了均值變化的影響,而后一項主要是為了計入方差變化的影響。
2.3 損傷識別流程

3 數值模擬算例
3.1 模型算例及損傷工況
以6自由度集中質點模型檢驗算法的性能,如圖2所示。其中:mi=1;ki=1 500 (i=1,2,…,6)。模型采用瑞雷阻尼假定,即C=αM+βK,任取2階模態阻尼比即可確定阻尼矩陣,隨機選取模型第1階和第3階阻尼比為0.02,計算得α=0.308 09,β=7.5×10-4。

圖2 6自由度計算模型Fig.2 Six degree-of-freedom system
在質點6處輸入隨機激勵,取質點1~6處的加速度響應為輸出信號。擬定的損傷工況如表1所示。
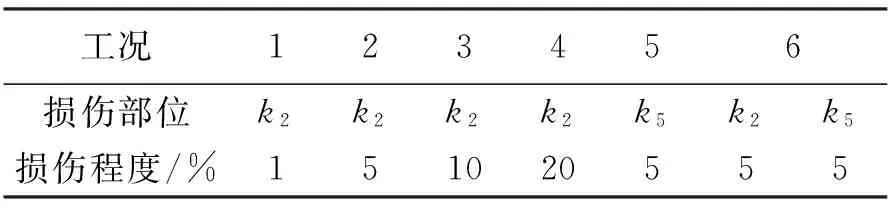
表1 6自由度體系的損傷工況
因該體系的最高頻率為11.97 Hz,取加速度信號的采樣頻率為100 Hz,并設定每1 000個數據點為1個數據段。在基準狀態、參考狀態和未知狀態下分別取1 000個數據段進行計算,可得到1 000個MD值。
取基準狀態下各質點的100段數據,采用AIC準則計算模型的階數,得到VAR模型的合理階數范圍為5~15,取5階VAR模型VAR(5)進行損傷識別計算,然后分析模型階數對損傷識別性能的影響。
3.2 損傷識別結果

圖3 損傷工況1下部分測點的MD分布曲線Fig.3 MD distribution under damage case 1 for partial sensors
體系在損傷工況1下部分測點的MD分布曲線如圖3所示。圖中的柱狀圖為1 000個MD值的頻數分布直方圖,曲線為其擬合的對數正態分布(在0.05的顯著水平下,采用柯爾莫可洛夫-斯米洛夫假設檢驗MD的頻數分布直方圖為對數正態分布)。從該圖可知,僅在損傷附近質點處的MD分布才發生變化,而其余測點處MD分布的變化較小,采用ROC曲線對MD分布是否發生顯著變化進行檢驗,并計算ROC曲線下的面積AUC(見表2)。
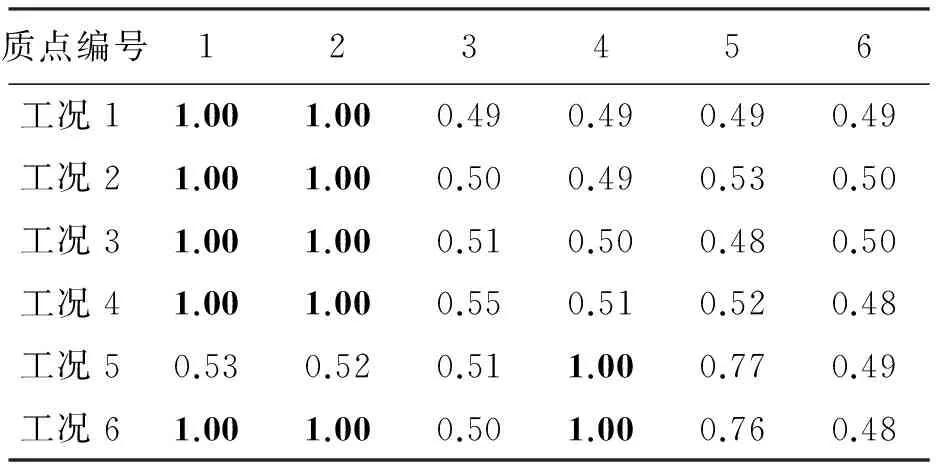
表2 各損傷工況下的AUC值
根據AUC的定義,筆者選取0.85為能否良好區分損傷是否發生的閾值。表2表明,在各損傷工況下,僅在損傷附近質點的AUC值才高于0.85(在表中以黑體標注),而其余質點的AUC值均低于0.85。因此,該指標不但能夠成功定位損傷程度較小(1%)的單處損傷,也能定位工況6下不同部位發生的損傷。
為識別彈簧2發生的不同程度的損傷,計算質點1,2在工況1~4下的BD值如圖4所示。圖4表明,隨著損傷程度的增加,質點1,2的BD值均呈單調上升趨勢,即BD值能正確區分損傷程度的相對大小。

圖4 不同損傷程度下的BD值Fig.4 BD values under different damage levels
3.3 噪音影響分析
圖5為不同噪音水平下質點1和質點2處的AUC值。隨著噪音水平的不斷增大,損傷定位的準確性將降低,特別是當結構損傷程度較小時,噪音的影響較為顯著。例如工況2下,當噪音水平為10%時出現了漏報警;但隨著損傷程度的增加,噪音的影響將逐步減小甚至消失。例如在工況5下,即使20%的噪音水平也完全能定位出質點1,2處的損傷,表明基于VAR模型的損傷識別算法具有較好的抗噪性能。

圖5 不同噪音水平下的AUC值Fig.5 AUC values under different noise levels
質點1在不同噪音水平下的BD值如圖6所示。該圖顯示在同一損傷工況下,隨著噪音水平的不斷升高,對應的BD值將越來越低。但在同一噪音水平下,隨著損傷程度的增加,BD值呈單調上升趨勢,表明此時仍能正確區分損傷程度的大小。

圖6 不同噪音水平下的BD值Fig.6 BD values under different noise levels
3.4 模型階數影響分析
考察模型階數對損傷識別算法的影響,計算15階VAR(15)模型的AUC值如表3所示。該模型的AUC值將在較多質點處大于0.85(在表中以黑體標注),即出現損傷部位的誤判,故應取AIC準則判定的較小階數建立VAR模型。
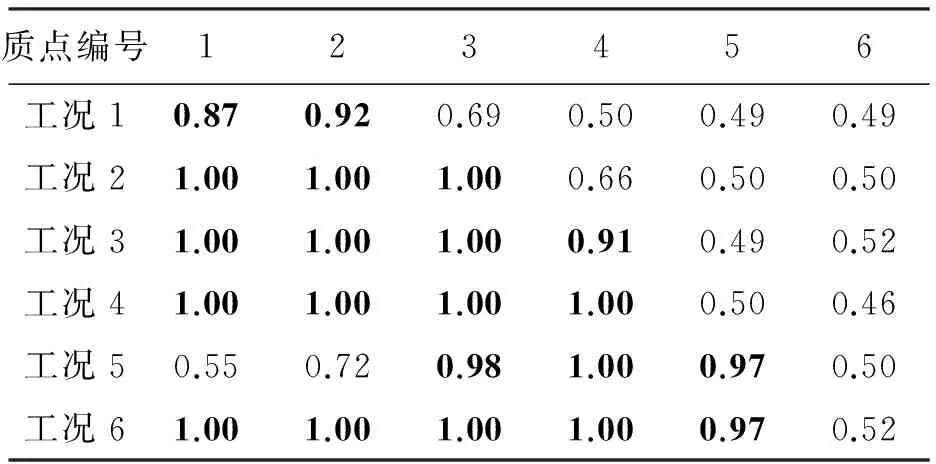
表3 VAR(15)模型的AUC值
VAR(10)和VAR(15)模型在工況1~4下的BD值如圖7所示。

圖7 不同VAR模型階數的BD值Fig.7 BD values for different VAR model orders
在模型階數相同的情況下,BD值仍隨損傷程度的增加而單調遞增,因此VAR模型階數的選取不影響損傷程度的識別。
4 實驗室框架實驗
框架采用寬為50.8 mm,厚為3.175 mm的鋼板組成梁和柱,并通過節點板和螺栓進行連接,其外觀尺寸如圖8所示。每個節點板共安裝4顆螺栓,2顆與柱相連,2顆與梁或剛性基座相連。試驗中通過第2層右柱頂的螺栓松動模擬損傷,故沿該側柱布置6個加速度傳感器,從上到下依次編號為1~6。
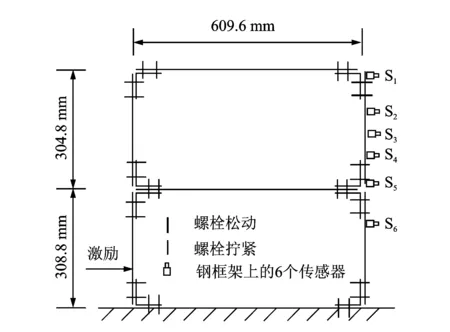
圖8 兩層框架模型Fig.8 The 2-story steel frame
采用PM50A型電磁激振器在第1層左柱下側輸入白噪聲激振。加速度傳感器的采樣頻率設為5 120 Hz。為模擬逐步損傷過程,依次松動第2層右柱頂的螺栓。具體的損傷工況設置如表4所示。

表4 框架的損傷工況
計算的AUC值如表5所示。在工況3和工況4下,僅傳感器1和傳感器2的AUC值高于閥值0.85,其余傳感器的AUC值均小于0.65,這一結果與結構實際損傷部位相符,因此在這兩個工況下可以準確判定損傷部位。在工況2下,雖傳感器1和2的AUC值低于0.85,但仍較其余傳感器處的AUC值大。這可能是因為實驗框架受力較小,僅松動一顆螺栓對結構影響較小,從而導致該工況下AUC值在損傷部位的變化不大。
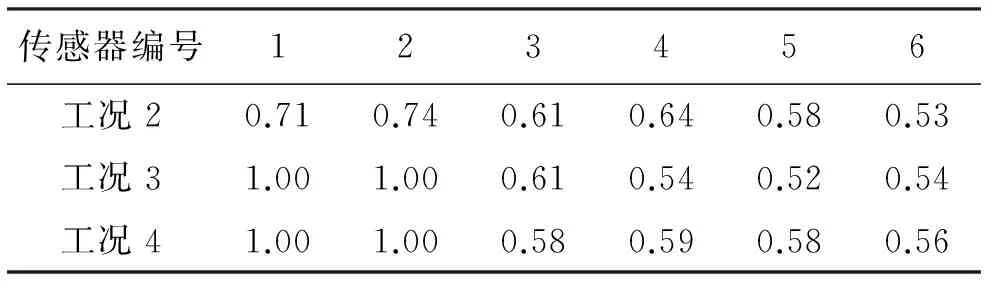
表5 實驗模型的AUC值
計算傳感器1在工況2~4下的BD值分別為1.32,3.58和7.83。 這表明BD值隨著損傷程度的增加而單調增加,因此通過BD值的計算能正確判定結構的損傷程度。
5 結 論
1) 基于VAR模型的損傷識別算法能夠正確定位結構的單處損傷和多處損傷,并能夠準確區分損傷程度的相對大小。
2) 當損傷程度較小時,算法可能出現漏報警,例如發生1%損傷時,在10%的噪音水平將無法識別損傷;但當損傷程度增大后,將大幅提高算法的損傷定位能力,例如發生10%損傷時,即使20%的噪音水平也能有效實現損傷定位。同時,噪音不影響損傷程度的識別。
3) 針對基準狀態下的不同數據,AIC準則將得出不同的VAR模型階數。較大的模型階數將導致損傷部位的誤判,故所提算法宜采用較小的VAR模型階數進行損傷識別。
[1] Sohn H, Farrar C R, Hemez F M, et al. A review of structural health monitoring literature:1996-2001 [R]. Los Alamos:Los Alamos National Laboratory, 2004:5-8.
[2] Farrar C R, Worden K. An introduction to structural health monitoring [J]. Philosophical Transactions of the Royal Society A: Mathematical, Physical & Engineering Sciences, 2007,365(1851):303-315.
[3] 馮新,李國強,范穎芳. 幾種常用損傷動力指紋的適用性研究[J].振動、測試與診斷,2004,24(4):277-280.
Feng Xin, Li Guoqiang, Fan Yingfang. Suitability study on dynamic signatures used in structural damage localization [J]. Journal of Vibration, Measurement & Diagnosis, 2004.24(4):277-280. (in Chinese)
[4] Tee K F, Koh C G, Quek S T. Numerical and experimental studies of a substructural identification strategy [J]. Structrual Health Monitoring, 2009,8(5):397-410.
[5] 宗周紅,褚福鵬,牛杰. 基于響應面模型修正的橋梁結構損傷識別方法[J]. 土木工程學報,2013,46(2):115-122.
Zong Zhouhong, Chu Fupeng, Niu Jie. Damage identification methods of bridge structures using response surface based on finite element model updating[J]. China Civil Engineering Journal,2013,46(2):115-122. (in Chinese )
[6] 吳森,韋灼彬,王紹忠,等. 基于AR模型和主成分分析的損傷識別方法[J]. 振動、測試與診斷,2012,32(5):841-845.
Wu Sen, Wei Zhuobin, Wang Shaozhong, et al. Damage identification based on AR model and PCA [J]. Journal of Vibration, Measurement & Diagnosis,2012,32(5):841-845. (in Chinese )
[7] 趙學風,段晨東,劉義艷,等. 基于小波包變換的支持向量機損傷診斷方法[J]. 振動、測試與診斷,2008,32(6):104-107.
Zhao Xuefeng, Duan Chendong, Liu Yiyan, et al. Diagnosis of structure damage by support vectorMach ine based on wavelet packet transform[J]. Journal of Vibration, Measurement & Diagnosis, 2008,32(6):104-107. (in Chinese)
[8] 熊飛,程遠勝,劉均. 基于HHT 方法的時變多自由度系統的損傷識別[J]. 振動、測試與診斷,2009,28(2):122-125.
Xiong Fei, Cheng Yuansheng, Liu Jun. Damage identification of time vary ing multi-Degrees of freedom system based on hilbert-huang transform [J]. Journal of Vibration, Measurement & Diagnosis, 2009,28(2):122-125. (in Chinese)
[9] Nair K K, Anne S K, Kincho H L. Time series-based damage detection and localization algorithm with application to the ASCE benchmark structure [J]. Journal of Sound and Vibration, 2006,291(1):349-368.
[10]Bornn L, Farrar C R, Park G. Damage detection in initially nonlinear systems [J]. International Journal of Engineering Science, 2010,48(10):909-920.
[11]Yao R, Pakzad S N. Autoregressive statistical pattern recognition algorithms for damage detection in civil structures [J]. Mechanical Systems and Signal Processing, 2012,31(8):355-368.
[12]Mustafa G, Catbas N. Statistical pattern recognition for structural Health Monitoring using time series modeling: theory and experimental verifications[J]. Mechanical Systems and Signal Processing,2009,23(7):2192-2204.
[13]Lütkepohl H. New introduction to multiple time series analysis[M]. New York:Springer,2005:23-58.
[14]S?reide K. Receiver-operating characteristic curve analysis in diagnostic, prognostic and predictive biomarker research [J]. Jouanl of Clinical Pathology, 2009,62(1):1-5.
[15]Choi E, Lee C. Feature extraction based on the Bhattacharyya distance [J]. Pattern Recognition,2003,36(8):1703-1709.

10.16450/j.cnki.issn.1004-6801.2015.05.011
*重慶市自然科學基金資助項目(CSTC2012JJA30006);中央高校基金資助項目(CDJRC10200018, CDJZR14205501)
2013-09-10;
2013-11-21
TU279.7+44
劉綱,男,1977年1月生,博士、副教授。主要研究方向為結構健康監測和振動控制。曾發表《Damage assessment with state-space embedding strategy and singular value decomposition under stochastic excitation》(《Structural Health Monitoring》2014,Vol.13,No.2)等論文。 E-mail:gliu@cqu.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50