手機(jī)移動平臺的虛擬軸承診斷儀的開發(fā)及應(yīng)用*
2015-03-13 02:24:28尹愛軍
振動、測試與診斷 2015年5期
尹愛軍, 張 泉, 孫 兵
(1.重慶大學(xué)機(jī)械傳動國家重點(diǎn)實(shí)驗(yàn)室 重慶,400044) (2.華能沁北發(fā)電有限責(zé)任公司檢修部 濟(jì)源,459012)
?
手機(jī)移動平臺的虛擬軸承診斷儀的開發(fā)及應(yīng)用*
尹愛軍1, 張 泉1, 孫 兵2
(1.重慶大學(xué)機(jī)械傳動國家重點(diǎn)實(shí)驗(yàn)室 重慶,400044) (2.華能沁北發(fā)電有限責(zé)任公司檢修部 濟(jì)源,459012)
針對傳統(tǒng)檢測分析儀器攜帶不便、測試效率低和受空間限制等問題,討論并實(shí)現(xiàn)了基于手機(jī)移動終端的虛擬儀器開發(fā)原理和方法。分析了Android NDK技術(shù),研究了Android平臺編程技術(shù)和無線藍(lán)牙傳輸技術(shù),探討了Android系統(tǒng)中的跨平臺虛擬儀器開發(fā)原理,構(gòu)建了該平臺下虛擬儀器系統(tǒng)構(gòu)架,開發(fā)了基于手機(jī)移動平臺的虛擬式軸承診斷儀。對開發(fā)的儀器進(jìn)行了現(xiàn)場試驗(yàn),并與LabVIEW進(jìn)行了對比。結(jié)果表明,該儀器使用便捷,分析結(jié)果準(zhǔn)確,具有較好的實(shí)際應(yīng)用效果。
虛擬儀器; 手機(jī); Android; 軸承; 故障診斷
引 言
機(jī)械裝備廣泛應(yīng)用于生產(chǎn)制造、冶金和化工等行業(yè),一旦裝備出現(xiàn)問題,將會影響生產(chǎn),甚至導(dǎo)致災(zāi)難性后果。因此,裝備故障診斷,特別是在線診斷具有重要的意義[1-3]。傳統(tǒng)機(jī)械故障診斷系統(tǒng)一般基于PC機(jī)或嵌入式計(jì)算機(jī)平臺,易受數(shù)據(jù)有線傳輸束縛或供電等問題影響,且總體上儀器系統(tǒng)體積較大、成本高,在面對復(fù)雜的野外測試環(huán)境和測試要求時(shí),此類系統(tǒng)攜帶不便,測試效率低。
隨著科技的進(jìn)步,手機(jī)的CPU頻率和存儲容量等性能已經(jīng)與中端計(jì)算機(jī)相媲美,可以完成較復(fù)雜的數(shù)據(jù)處理等功能,其應(yīng)用已經(jīng)不僅僅限于通信,而是作為通用的移動終端得到越來越廣泛的應(yīng)用。目前,基于手機(jī)平臺的檢測儀器已得到較多的應(yīng)用:a.日常生活,如便捷式手機(jī)醫(yī)療儀器;b.生產(chǎn)測量, 如氣體(液體)濃度的測量、區(qū)域面積測量和視覺測量等[4-5];c.科研工作,如離子濃度的測量和有色液體(固體)成分確定等。從這些研究和應(yīng)用可以看出,基于手機(jī)移動平臺的檢測儀器進(jìn)一步解放了儀器的應(yīng)用范圍和場合,真正實(shí)現(xiàn)測量的靈活性,擺脫自然條件及空間上的束縛,提高了檢測效率和時(shí)效性[6]。因此,基于手機(jī)移動終端的檢測儀器必將成為儀器技術(shù)發(fā)展的新潮流。
軸承是機(jī)械裝備中的關(guān)鍵部件,其在役狀態(tài)檢測與診斷對保證裝備安全可靠運(yùn)行具有重要意義[7-8]。筆者研究了Android系統(tǒng)中的虛擬儀器開發(fā)技術(shù),論述了跨平臺儀器開發(fā)原理,利用藍(lán)牙技術(shù)實(shí)現(xiàn)了實(shí)時(shí)數(shù)據(jù)的采集和傳輸,開發(fā)了手機(jī)虛擬式軸承診斷儀,并通過對比試驗(yàn)驗(yàn)證了儀器的有效性。該儀器融合了手機(jī)移動終端和虛擬儀器的特點(diǎn),促進(jìn)了檢測儀器向移動平臺的新發(fā)展,真正實(shí)現(xiàn)了檢測儀器的便捷性,提高測試的效率。
1 系統(tǒng)結(jié)構(gòu)
1.1 系統(tǒng)構(gòu)架
Android操作系統(tǒng)因其開源等優(yōu)勢,廣泛應(yīng)用于手機(jī)等移動終端[9]。筆者開發(fā)的手機(jī)虛擬儀器基于Android平臺,其系統(tǒng)結(jié)構(gòu)如圖1所示。數(shù)據(jù)感知終端(下位機(jī))對傳感器信號進(jìn)行調(diào)理并采集,然后通過藍(lán)牙/Wi-Fi等通信方式將數(shù)據(jù)發(fā)送到手機(jī)終端進(jìn)行分析處理。手機(jī) (上位機(jī))虛擬儀器接收數(shù)據(jù)進(jìn)行分析處理,主要功能模塊包括通信模塊、數(shù)據(jù)分析處理模塊和結(jié)果圖形化顯示等。

圖1 系統(tǒng)架構(gòu)圖Fig.1 System architecture
1.2 跨平臺開發(fā)原理
基于手機(jī)平臺的虛擬儀器開發(fā)主要利用了Android NDK中的JNI(Java native interface)技術(shù)[10]和基于C語言的信號分析處理跨平臺開發(fā)技術(shù),開發(fā)原理如圖2所示。

圖2 跨平臺開發(fā)原理Fig.2 Cross-platform development principle
在Android操作系統(tǒng)中,采用Java設(shè)計(jì)語言,通過Android NDK進(jìn)行儀器控制和用戶界面層程序開發(fā)。儀器分析處理功能,采用C語言開發(fā)。利用Android NDK中的Libraries & JNI模塊,實(shí)現(xiàn)了Java界面層和儀器算法功能之間的交互,并將分析層的分析處理結(jié)果返回給Java界面層顯示輸出。圖3為JNI調(diào)用示意圖。
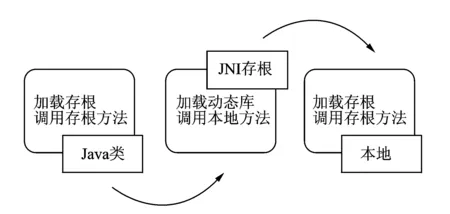
圖3 JNI調(diào)用過程示意圖Fig.3 Schematic calling process of JNI
在這種跨平臺開發(fā)模式下,因?yàn)镃/C++語言所編寫的分析程序,效率比用純粹Java語言編寫的程序效率高;同時(shí),采用JNI技術(shù)后,代碼不是在Java虛擬機(jī)中運(yùn)行,而是在系統(tǒng)底層直接運(yùn)行,使得運(yùn)行效率進(jìn)一步提高。因此,跨平臺開發(fā)保證了手機(jī)虛擬儀器具有較高的運(yùn)算速度。
1.由香日德出發(fā)東行,經(jīng)三道河灣、上西臺、都蘭、夏日哈、南谷、烏龍灘、沙柳灣、旺日尕、茶卡、石乃亥和大水橋,而后可以分別前往伏俟城和曼頭城;
2 Android平臺測試儀器開發(fā)
2.1 跨平臺信號分析模塊開發(fā)
軸承在運(yùn)行過程中,裝配不當(dāng)、潤滑不良和過載等因素都可能導(dǎo)致軸承過早損傷而出現(xiàn)故障。軸承故障形式有疲勞、磨損、塑性變形和膠合等[8]。當(dāng)軸承出現(xiàn)疲勞剝落后,在其頻譜的中高頻區(qū)外環(huán)固有頻率附近出現(xiàn)明顯的調(diào)制峰群;同時(shí)軸承的不同部件將表現(xiàn)出不同的故障頻率,因此可以根據(jù)故障特征頻率進(jìn)行軸承狀態(tài)檢測。設(shè)主軸旋轉(zhuǎn)頻率為
其中:n為軸承轉(zhuǎn)速。
內(nèi)圈通過頻率為
(1)
其中:N為滾動體個(gè)數(shù);d0為滾動體直徑;D為軸承節(jié)徑;α為接觸角。
外圈通過頻率為
(2)
滾動體通過頻率為
(3)
2.2 雙緩沖繪圖機(jī)制與顯示模塊開發(fā)
在Android系統(tǒng)中,有兩種繪圖模式:由獨(dú)立線程繪圖;在主線程中直接繪圖。當(dāng)在主線程中繪圖時(shí),會因更新畫面時(shí)間過長,導(dǎo)致主線程阻塞,從而無法響應(yīng)其他事件(如按鍵操作等),且易出現(xiàn)畫面閃爍等現(xiàn)象。因此,筆者采用Android中的Surface View多線程雙緩沖繪圖機(jī)制,其原理如圖4所示。
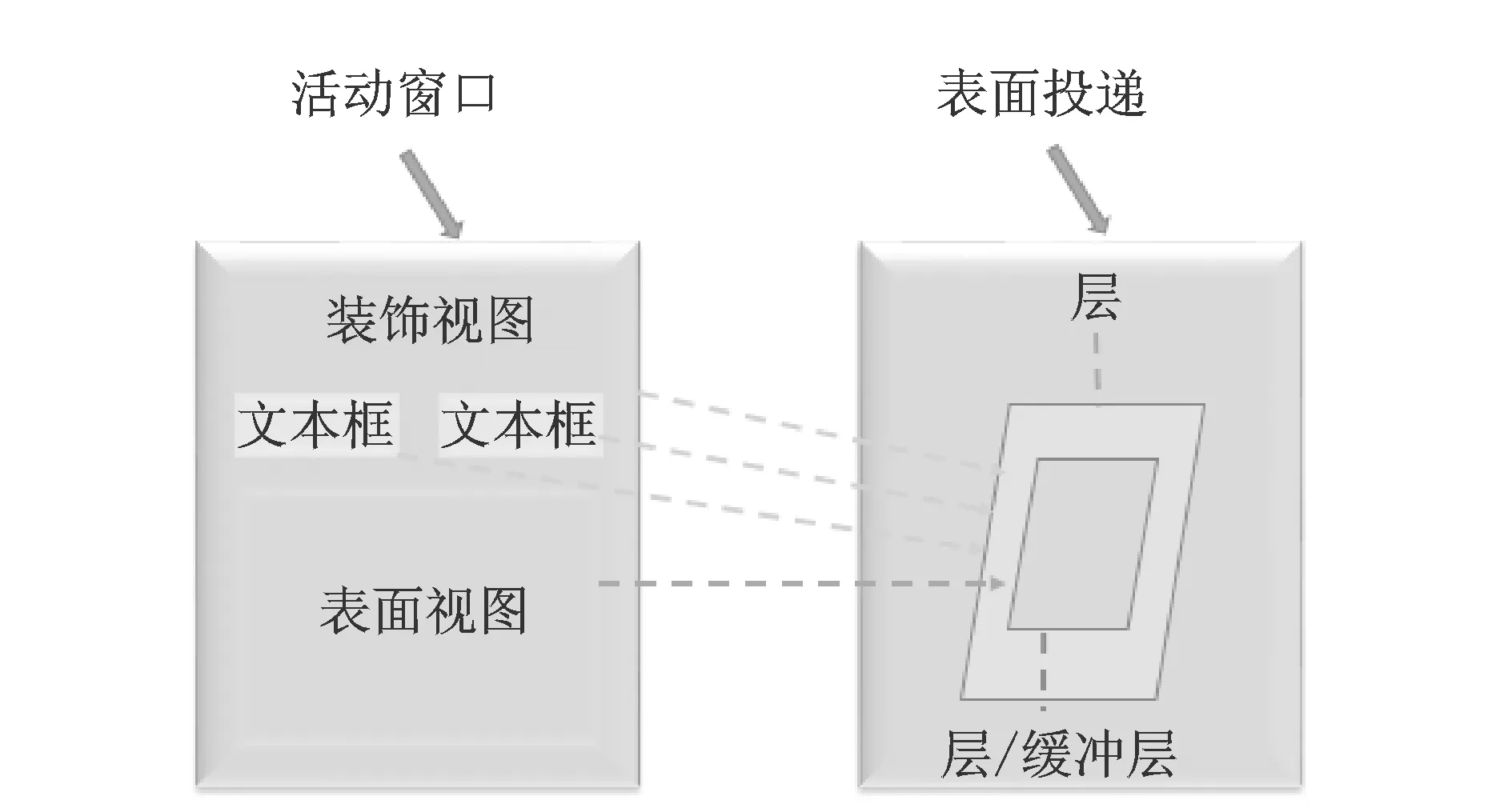
圖4 Surface view原理Fig.4 The principle of surface view
圖4中,Activity Window包含Decor View,Text View以及Surface View三種視圖。Surface Flinger運(yùn)行于Android系統(tǒng)進(jìn)程中,負(fù)責(zé)管理Android的幀緩沖區(qū)(frame buffer)。Activity Window中的Decor View和Text View對應(yīng)Surface Flinger中一個(gè)Layer, 而Surface View對應(yīng)另一個(gè)獨(dú)立的Layer或Layer Buffer。同時(shí),Activity Window中可以有多個(gè)Surface View實(shí)例,而每一個(gè)Surface View實(shí)例在Surface Flinger都有一個(gè)獨(dú)立的Layer分別用來描述各自的繪圖屬性。因Surface View為獨(dú)立的繪圖線程,從而提高了應(yīng)用程序的響應(yīng)速度。在雙緩沖繪圖模式下,顯示模塊工作的流程如圖5所示。

圖5 顯示模塊流程圖Fig.5 Process graph of display module
2.3 基于藍(lán)牙通信的數(shù)據(jù)采集與傳輸
傳統(tǒng)檢測儀器的數(shù)據(jù)傳輸大都是通過有線連接實(shí)現(xiàn)的,在傳輸過程中受到空間上的限制。為了讓檢測更加靈活、便捷;且手機(jī)一般都自帶有藍(lán)牙通信功能,因此筆者所開發(fā)的儀器首先通過下位機(jī)進(jìn)行信號調(diào)理和采集,然后通過藍(lán)牙模塊與手機(jī)進(jìn)行藍(lán)牙通信,實(shí)現(xiàn)振動信號的實(shí)時(shí)傳輸和處理[15]。Android藍(lán)牙通信流程所圖6所示。
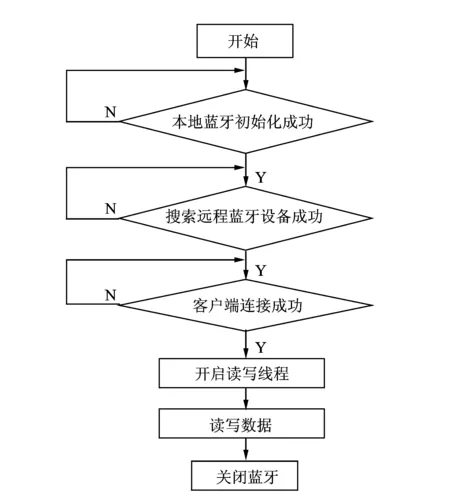
圖6 藍(lán)牙通信流程圖Fig.6 Process graph of Bluetooth communication
筆者開發(fā)的手機(jī)虛擬儀器系統(tǒng)如圖7所示。其中采集器為Arduino MEGA 2560,A/D轉(zhuǎn)換精度為10位,最高采樣頻率為15 kHz;藍(lán)牙通信模塊為HK-750,藍(lán)牙2.0通信協(xié)議,傳輸距離約為10 m,其傳輸率為1 Mbps[16]。當(dāng)以最高采樣頻率采集數(shù)據(jù)時(shí),數(shù)據(jù)量為0.15 Mbps,符合藍(lán)牙通信要求。
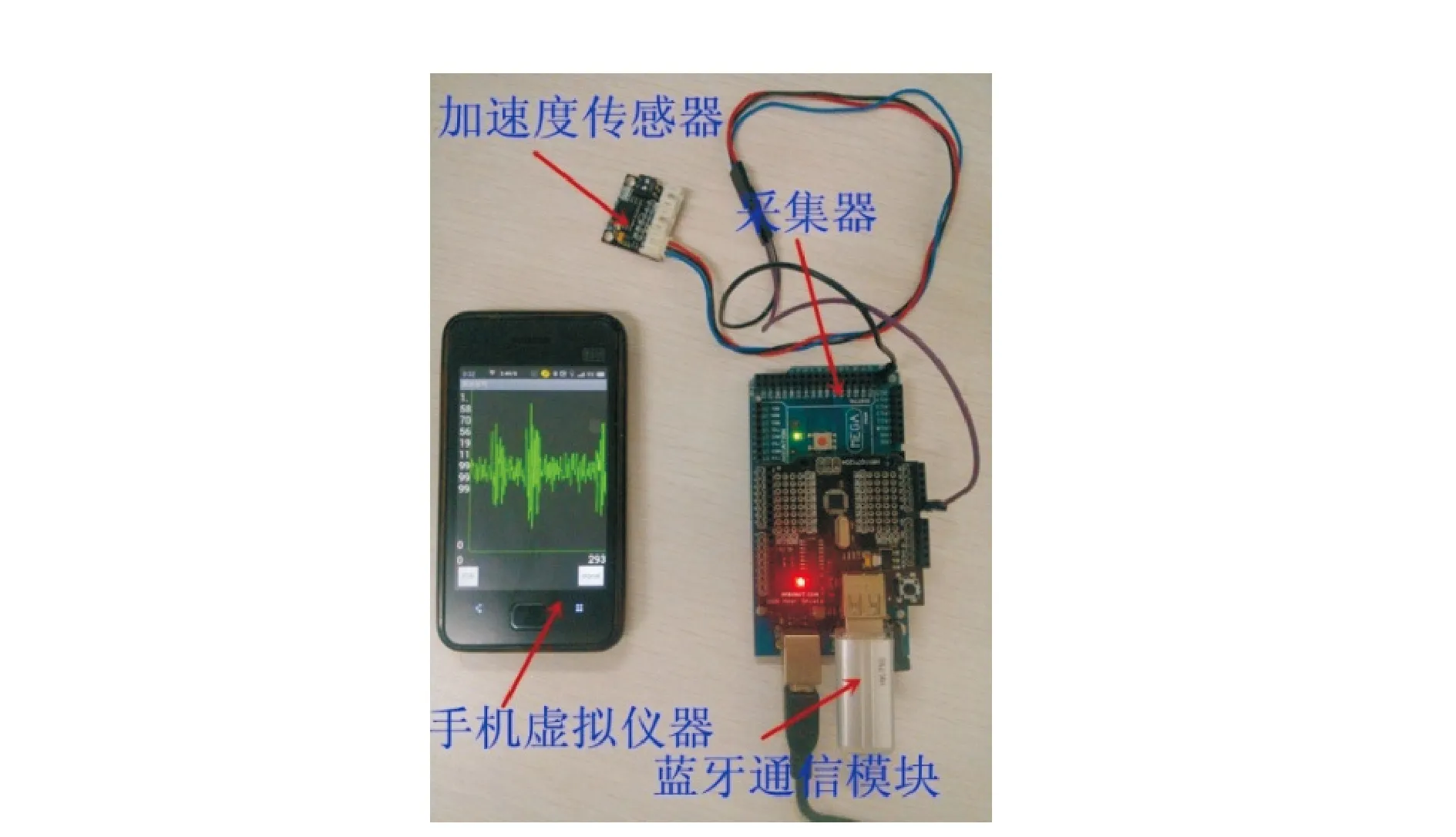
圖7 完整儀器系統(tǒng)圖Fig.7 Full instrumentation system diagrain
3 試驗(yàn)驗(yàn)證與分析
現(xiàn)用所開發(fā)的儀器在一軸承故障試驗(yàn)臺上進(jìn)行了現(xiàn)場測試,并與LabVIEW系統(tǒng)分析結(jié)果進(jìn)行了對比。試驗(yàn)現(xiàn)場如圖8所示,其中振動傳感器為MMA7260低功耗三軸加速度傳感器;手機(jī)為M9,CPU頻率為1 GHz,其內(nèi)存容量為512 MHz,主頻分辨率960×640。試驗(yàn)軸承型號為6205-2RS JEM SKF深溝球軸承,內(nèi)徑為25 mm,外徑為53 mm,軸承節(jié)徑為39 mm,滾動體9個(gè),滾動體直徑8 mm,接觸角α=0°。試驗(yàn)臺工作轉(zhuǎn)數(shù)為1 750 r/min,采樣頻率為12 kHz。根據(jù)式(1~3),軸承主要故障特征頻率如表1所示。

圖8 軸承測試實(shí)驗(yàn)現(xiàn)場圖Fig.8 Bearing test site map
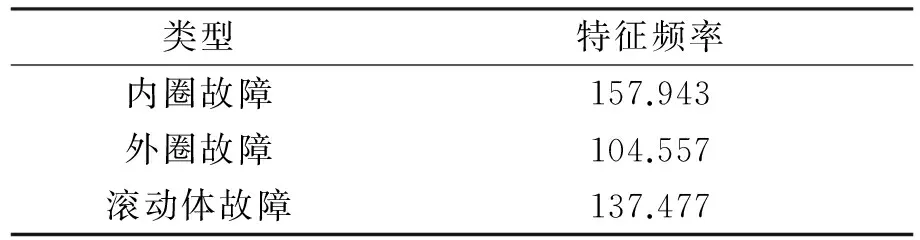
類型特征頻率內(nèi)圈故障157.943外圈故障104.557滾動體故障137.477
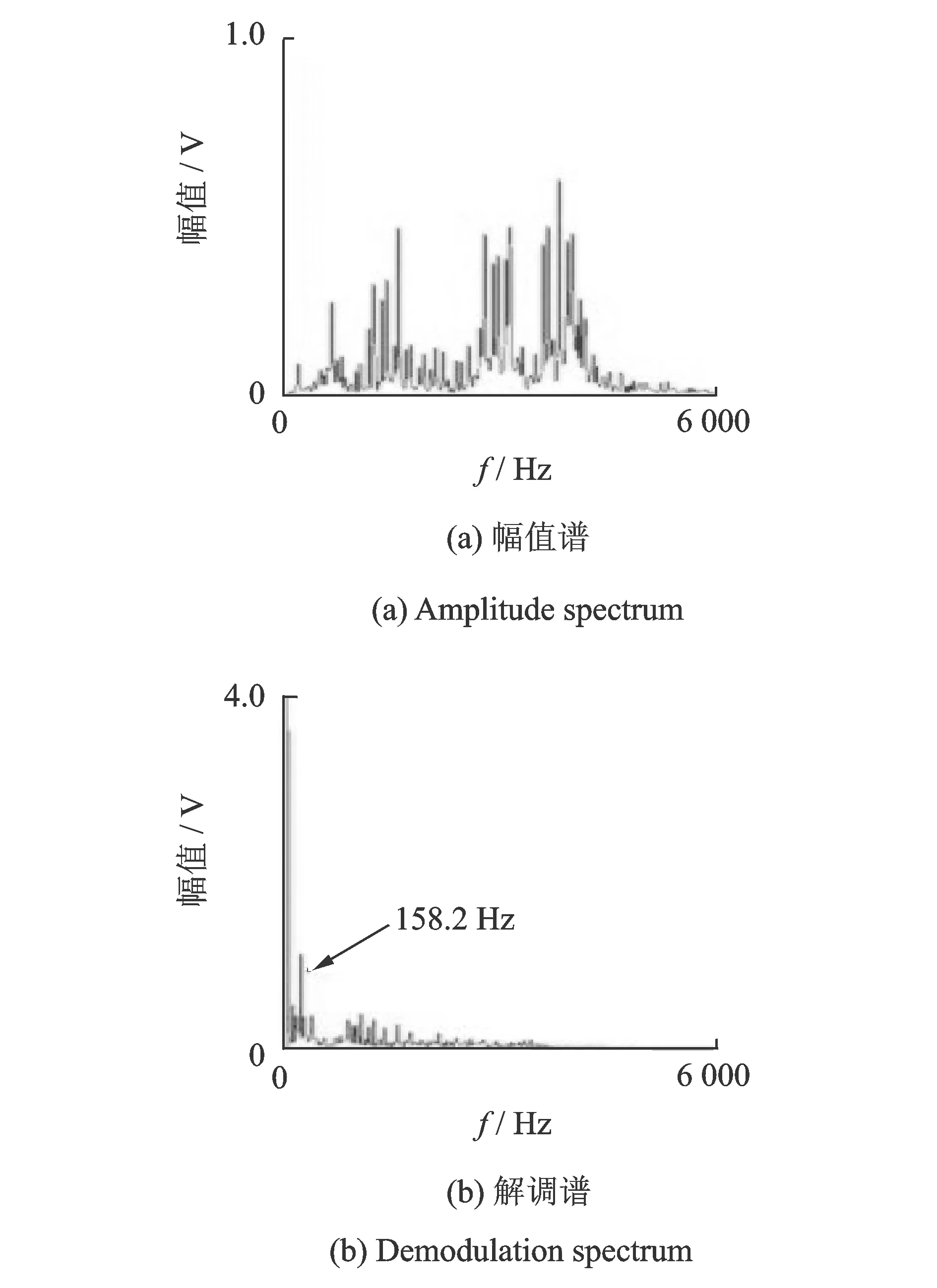
圖9 本儀器分析結(jié)果Fig.9 Analysis results of the instrument

圖10 LabVIEW分析結(jié)果Fig.10 Analysis results of LabVIEW
圖9~10為分別利用本儀器和LabVIEW對圖9所示的時(shí)域信號進(jìn)行頻譜分析的結(jié)果。可以看出,兩類系統(tǒng)的分析結(jié)果完全一致。同時(shí),由圖9(a)可見,信號頻率成分非常復(fù)雜,難以準(zhǔn)確評定故障。根據(jù)軸承故障信號特點(diǎn),對圖該振動信號進(jìn)行希爾伯特包絡(luò)譜分析,結(jié)果如圖9(b),10(b)所示。從圖11(b)中可以看出,在158.2 Hz位置出現(xiàn)了明顯的峰值。結(jié)合表1,該頻率與軸承內(nèi)圈的故障特征頻率吻合,所以可以判斷軸承內(nèi)圈出現(xiàn)故障,結(jié)果與實(shí)際情況一致。
4 結(jié)束語
隨著手機(jī)運(yùn)算等性能的提高,基于手機(jī)移動終端的檢測儀器系統(tǒng)的開發(fā)與應(yīng)用已得到越來越廣泛的研究,是檢測儀器發(fā)展的新趨勢。筆者分析了Android系統(tǒng)中虛擬儀器的跨平臺開發(fā)的基本原理,建立了基于數(shù)據(jù)無線傳輸?shù)氖謾C(jī)虛擬儀器系統(tǒng)框架,探討了虛擬儀器開發(fā)過程中的關(guān)鍵問題,最終開發(fā)了在線手機(jī)虛擬儀器,并在軸承故障實(shí)驗(yàn)臺上進(jìn)行了對比分析實(shí)驗(yàn)。與傳統(tǒng)虛擬儀器比較,手機(jī)虛擬儀器攜帶使用方便,操作便捷,該儀器分析結(jié)果準(zhǔn)確,具有實(shí)際應(yīng)用價(jià)值。
然而,手機(jī)運(yùn)算能力與一般計(jì)算機(jī)性能仍有差距,因此如何進(jìn)一步優(yōu)化測試分析功能,提高分析處理速度是手機(jī)儀器的關(guān)鍵。同時(shí),目前絕大部分傳感器及其調(diào)理設(shè)備仍然主要面向Windows系統(tǒng),因此Android系統(tǒng)下信號調(diào)理與采集系統(tǒng)的研究與開發(fā)是大力發(fā)展手機(jī)儀器的另一個(gè)關(guān)鍵問題。
[1] 張健. 機(jī)械故障診斷技術(shù) [M].北京:機(jī)械工業(yè)出版社,2008:214.
[2] 朱革.齒輪噪聲解調(diào)分析新方法及其音質(zhì)主觀評價(jià)體系的研究[D]. 重慶:重慶大學(xué),2003.
[3] Chen Binqiang, Zhang Zhousuo, Sun Chuang, et al. Fault feature extraction of gearbox by using overcomplete rational dilation discrete wavelet transform on signals measured from vibration sensors[J]. Mechanical Systems and Signal Processing,2012,33(2012):275-298.
[4] Gong Aiping, Yu Junlin, He Yong, et al. Citrus yield estimation based on images processed by an Android mobile phone[J]. Biosystems Engineering, 2013, 115(2):162-170.
[5] Zhang P, Li B, Huang Z, et al. Research of Temperature measuring virtual instrument based on smart mobile phone [C]∥International Workshop on IEEE,Intelligent Systems and Applications(ISA). Washington,DC 20036-4910, USA:IEEE,2009:1-4.
[6] 尹愛軍, 楊正益, 孫麗萍, 等. 虛擬儀器開發(fā)中功能組態(tài)設(shè)計(jì)[J]. 振動、測試與診斷, 2010, 30(2):193-196.
Yin Aijun, Yang Zhengyi, Sun Liping, et al. Design of function configuration in virtual instrument development [J]. Journal of Vibration, Measurement & Diagnosis, 2010, 30(2): 193-196. (in Chinese)
[7] 梁鋒.通用性齒輪箱狀態(tài)檢測與故障診斷系統(tǒng)的研究[D].重慶:重慶大學(xué),2004.
[8] Flores A Q, Cardoso A J M, Carvalho J B. Gearbox fault detection by wavelet and spectrum analysis of the induction motor power [C]∥2013 IEEE International Electric Machines & Drives Conference (IEMDC). Washington,DC20036-4910, USA:IEEE, 2013: 88-92.
[9] Developers A. What is Android [EB/OL]. (2011-09-22)[2013-07-21].http:∥developer.android.com/guide/basics/what-is-Android.html.
[10]Son K C, Lee J Y. The method of android application speed up by using NDK[C]∥2013 3rd International Conference on Awareness Science and Technology (ICAST).Washington,DC20036-4910, USA: IEEE, 2011: 382-385.
[11]肖潔. 基于Walsh變換的滾動軸承典型故障診斷方法研究[D].大慶:大慶石油學(xué)院,2010.
[12]Mohanty A R, Kar C. Multiresolution Fourier transform of ripple voltage and current signals for fault detection in a gearbox [C]∥ IEEE International Conference on Industrial Technology (ICIT). USA:IEEE, 2006: 1367-1373.
[13]Oppenheim A V, Schafer R W, Buck J R. Discrete-time signal processing [M]. Englewood Cliffs: Prentice-hall, 1989: 9-70.
[14]沈國際.振動信號處理技術(shù)在直升機(jī)齒輪箱故障診斷中的應(yīng)用[D].長沙:國防科技大學(xué),2005.
[15]魏曉艷,李軍. 紅外通訊技術(shù)與藍(lán)牙技術(shù)比較[J]. 電子元器件應(yīng)用,2007,4:68-69,72.
Wei Xiaoyan, Li Jun. Comparison between infrared communication technology and Bluetooth Technology [J]. Electronic Component & Device Applications, 2007,4:68-69,72. (in Chinese)
[16]Rashid R, Yusoff R. Bluetooth performance analysis in personal area network (PAN)[C]∥RF and Microwave Conference. Washington D.C.,USA: IEEE, 2006: 393-397.

10.16450/j.cnki.issn.1004-6801.2015.05.015
*國家自然科學(xué)基金資助項(xiàng)目(51105396)
2013-10-21;
2013-12-25
TH7; TP3
尹愛軍,男,1978年5月生,博士、教授。主要研究方向?yàn)橹悄軠y試與虛擬儀器,現(xiàn)代信號分析處理,無損檢測,故障檢測與診斷等。曾發(fā)表《Physical interpretation and separation of eddy current pulsed thermography》(《Journal of Applied Physics》2013,Vol.113,No.6)等論文。
E-mail:aijun.yin@cqu.edu.cn
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
測控技術(shù)(2018年9期)2018-11-25 07:44:58
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
電測與儀表(2015年21期)2015-04-09 11:52:08
電機(jī)與控制應(yīng)用(2015年1期)2015-03-01 03:49:19
浙江理工大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年5期)2015-03-01 02:53:59