基于單一敏感質量的三軸電容加速度計的設計*
2015-03-13 02:24:45陳立國孫立寧
振動、測試與診斷 2015年5期
陳立國, 袁 飛, 陳 濤, 孫立寧
(蘇州大學機器人與微系統研究中心&蘇州納米科技協同創新中心 蘇州,215021)
?
基于單一敏感質量的三軸電容加速度計的設計*
陳立國, 袁 飛, 陳 濤, 孫立寧
(蘇州大學機器人與微系統研究中心&蘇州納米科技協同創新中心 蘇州,215021)
設計了一種單一敏感質量的三軸電容加速度計。該器件采用全差分電容的檢測方法,滿足了靈敏度的設計要求并解決了三軸的交叉耦合問題,其獨特的單一敏感質量結構減小了器件的整體尺寸,降低了成本。器件由外延多晶硅工藝實現了18 μm的厚度制作,降低了熱機械噪聲,增大了檢測電容,提高了靈敏度、分辨率和可靠性。ANSYS仿真結果表明,器件在3個軸向的靈敏度一致性好,抗干擾,測試結果和理論分析相符。該加速度計結構工藝簡單,在消費電子領域有較好的應用前景。
單一敏感質量; 三軸加速度計; 微機電系統; 全差分電容檢測
引 言
隨著微機械電子系統技術的不斷成熟,硅微機械加速度計成功地在汽車氣囊、防抱死制動系統、手機、平板、游戲手柄和航模等領域得到廣泛應用[1-3]。
電容式微加速度計以其溫度漂移效應小、溫度穩定性好、結構相對簡單、單位芯片面積靈敏度高、功耗低、易于構成高精度的力平衡式器件和綜合性能最優的特點成為當前微加速度計研究的熱點和主流。在汽車氣囊、計步器和寵物運動檢測等應用中,單軸加速度計已經能滿足使用需求,然而在三維游戲、航模和手機等消費電子領域,檢測3個方向的加速度變得尤為重要。
傳統的三軸檢測方式是將3個單軸的加速度計組裝在一起構成三軸加速度計,這種方法限制了加速度計的微小化程度,組裝時也引入了正交誤差。
Wenzel等[4]運用低成本的表面硅犧牲層工藝結合紫外光刻(UV-LIGA)加工出了一款新型三軸加速度計,其特點在于采用3個集成于同一襯底上的獨立質量塊分別檢測3個軸向的加速度,工藝步驟簡單,減小了正交誤差,但其分立的結構設計,犧牲了器件的尺寸面積,不利于器件的微型化。王守明等[5]采用體硅工藝加工出了一款新型結構的梳齒電容加速度計,該設計中采用兩個質量塊,分別檢測水平和垂直方向的加速度,其中,x,y水平方向共用一個質量塊,不對稱的梳齒設計,消除了垂直方向的干擾,垂直方向通過梁的設計,消除了水平方向的影響,但是其垂直方向采用變面積梳齒檢測,靈敏度不高。STMicroelectronics也采用了相同的雙質量塊檢測的設計[6],但在垂直方向上設計為變間距的差分結構,有效利用面積,增大了靈敏度。Xie等[6]設計了一款新型的單質量三軸加速度計,其創新地設計了不等高的梳齒作為檢測電容,加工完成的整體尺寸為4 mm×4 mm,但其水平方向和垂直方向的靈敏度有很大的不一致性(水平方向為145.3 fF/g,垂直方向為9.1 fF/g)。Nonomura等[7]設計了一個三軸全部差分的單質量加速度計,其使用獨特的Zigzag-Shaped Z-electrode結構來保證z向的電容擁有相同的間距,從而獲得較高的靈敏度和長期的穩定性,但是其制造工藝復雜。可以看出,三軸加速度計在消費電子領域的需求引起了廣泛的研究,如何有效地減小加速度的芯片尺寸,采用簡單的制造工藝降低成本,又保證靈敏度的應用需求是當前研究的難點。
筆者介紹了一種單一敏感質量的三軸加速度計的設計、制作和測試,采用單一的質量梳齒結構來檢測3個垂直方向的加速度,減小了芯片尺寸,全差分的電容檢測既消除了3個軸向的交叉耦合,又保證了其靈敏度的需求。器件采用外延多晶硅工藝,增加了慣性質量塊的厚度,降低了熱機械噪聲,提高了靈敏度和分辨率。
1 設計與原理
1.1 結構設計
圖1為筆者提出的加速度計的工作原理圖,整體結構尺寸為668 μm×475 μm×18 μm,質量塊和定梳齒通過錨點固定在襯底上,質量塊和襯底之間存在一初始間距,形成z向差分檢測電容;橫向和縱向的動梳齒作為水平軸向的檢測梳齒和兩組定梳齒構成差分電容,既提高了檢測靈敏度又消除了共模誤差。x,y軸向檢測梳齒的放大圖如圖1(b,c)所示。設計采用等間距的梳齒結構,梳齒間距為2 μm。其靜態電容為
(1)
其中:n0為檢測梳齒的對數;ε為相對介電常數;ε0為真空介電常數;lc,wc分別為梳齒正對部分的長和寬;d0為動梳齒和靜梳齒之間的初始間距。
設計采用兩根雙端固支的簡支梁支撐質量塊,梁在各個軸向的變形剛度為
其中:n為梁的根數;N為每根梁的折數;E為彈性模量;l,t,w分別為梁的長、厚和寬;γ為泊松比;R為梁和質量塊的連接端到旋轉中心的距離[8]。
如圖2所示,在本設計中R取308 μm。
圖3為加速度計的完整結構圖。為了防止質量塊產生過大位移,造成貼合現象,在偏心質量的部分設計了兩個止擋塊[9]。為了減小阻尼,在整個質量塊上開了阻尼孔,同時為了增大偏心質量,提高靈敏度,在偏心質量部分的阻尼孔比其他地方的要小,其中,大阻尼孔為3.5 μm×7.5 μm,小阻尼孔為5 μm×5 μm。
表1為所設計的加速度計的各項參數。
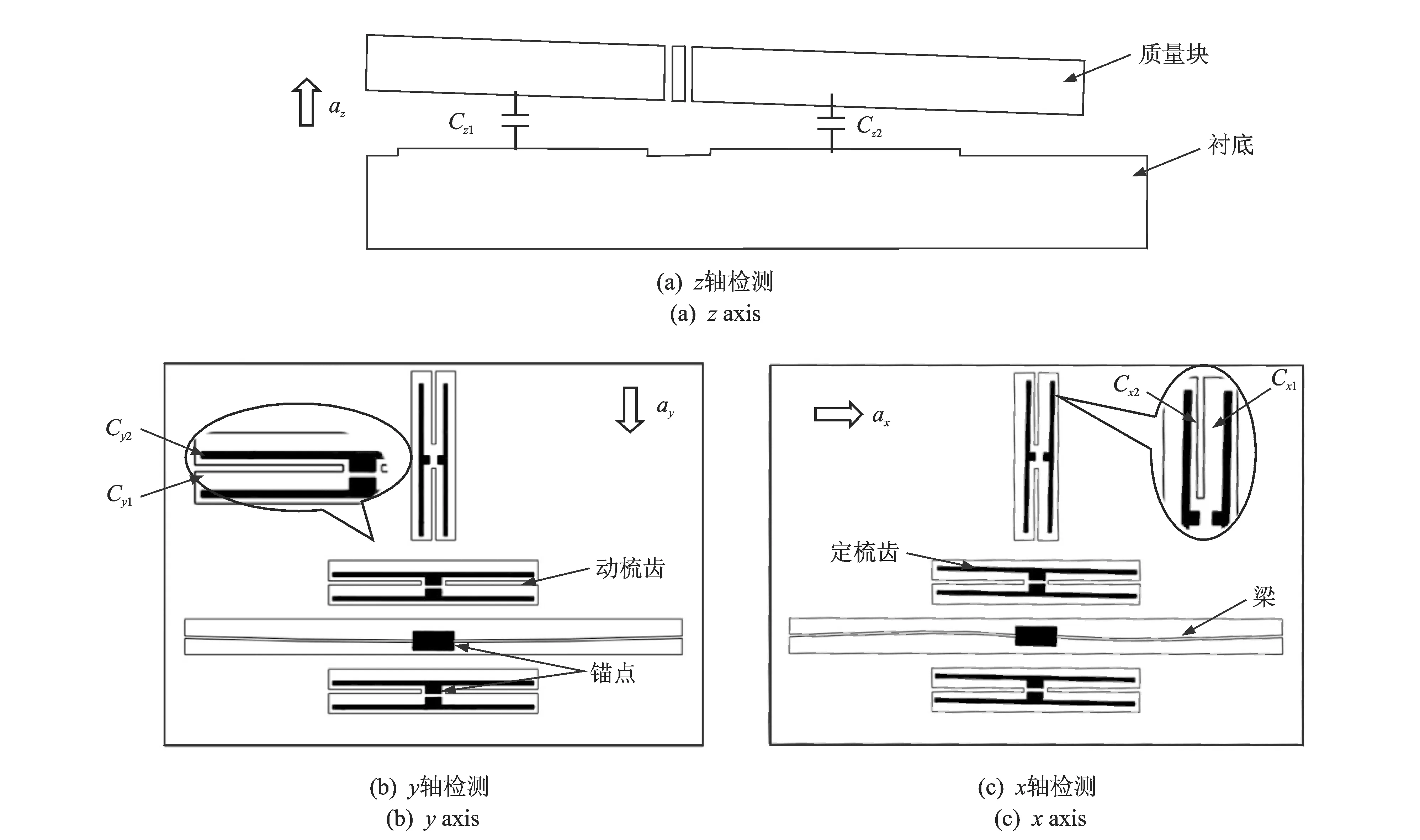
圖1 加速度計檢測原理Fig.1 Detection principle of tri-axis accelerometer
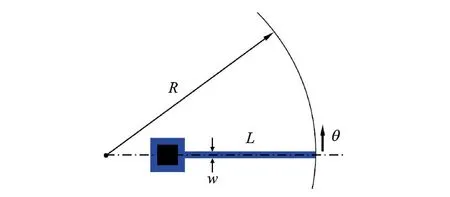
圖2 參數RFig.2 Parameter R

圖3 加速度計阻尼孔示意圖Fig.3 Schematic diagram of damping hole
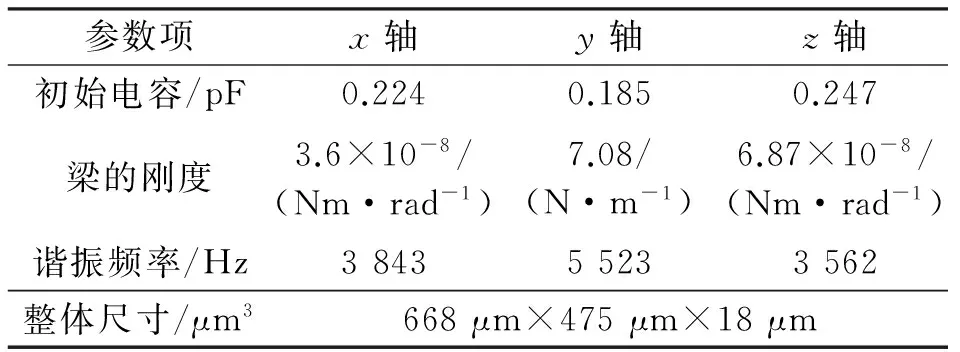
參數項x軸y軸z軸初始電容/pF0.2240.1850.247梁的剛度3.6×10-8/(Nm·rad-1)7.08/(N·m-1)6.87×10-8/(Nm·rad-1)諧振頻率/Hz384355233562整體尺寸/μm3668μm×475μm×18μm
1.2 檢測原理
電容式加速度計由慣性質量塊、支撐梁和固定梳齒電極構成,定齒和動齒之間的電容變化能反映出外界加速度的大小。整個加速度計可以等效為一個彈簧-阻尼系統,其振動方程為
X(s)(ms2+cs+k)=mA(s)
(5)
其中:m為可動質量;k為彈性梁的剛度;c為系統的阻尼系數。
在穩態情況下,即s=0時,可得微位移和加速度的關系為
(6)
其中:ω為質量塊結構的諧振頻率。
電容式加速度計利用敏感部分將被檢測的加速度信號轉換成電容變化量,在通過外部的信號調理電路處理,實現加速度的線性輸出。在本設計中,當可動梳齒產生X(s)的微位移時,電容變化量為
(7)
(8)
在實際應用中,電容的位移變化量大約是初始間距的1/200,遠小于初始間距。由式(8)可以看出,在位移量遠小于間距的情況下,電容變化量和施加的加速度成線性關系。
1.3 加速度交叉耦合分析
對于三軸加速度計而言,如何減小亦或消除各個軸之間的耦合是十分重要的,這也是目前研究的重點。本設計中,充分考慮到各個軸之間的耦合,通過梳齒結構的設計,將每個軸所受的其他軸的影響消除。當整體結構受到z軸向的加速度時(圖1(a)),結構在偏心質量的作用下,繞錨點的幾何中心產生平面外扭轉,此時Cz1減小,Cz2增大,由于y軸向梳齒關于錨點中心對稱,因此Cy1和Cy2發生相同的變化,x向梳齒在錨點的同一側,Cx1和Cx2也發生相同的變化,經差分處理后,亦只有電容組Cz1,Cz2輸出差模信號。當整體結構受到y軸向的加速度時(圖1(b)),結構只在y方向上產生平面內的位移,此時Cy1減小,Cy2增大,用于檢測x,z軸向加速度的梳齒正對面積和梳齒間距均不發生改變,電容無變化,只有電容組Cy1,Cy2輸出差模信號;當整體結構受到x軸向的加速度時(圖1(c)),結構在偏心質量的作用下,繞錨點的幾何中心發生平面內扭轉,可以看出,Cx1變小,Cx2增大,Cy1和Cy2發生相同的變化,Cz1和Cz2無變化,經差分處理后,只有電容組Cx1,Cx2輸出差模信號。由此可見,各個軸之間的相互影響得以抵消。
2 仿真模擬
用ANSYS對結構進行仿真模擬,以驗證其應力強度和靈敏度。建立其ANSYS模型,由于本模型中含有大量的阻尼孔,為優化模擬和減少仿真時間,先對面進行網格的劃分,之后再拉伸成體,進而對結構進行靜力學分析、模態分析和最大應力分析。
模態分析結果如圖4所示,計算諧振頻率和仿真值對比如表2所示。
由圖4可以看出,本結構的1階模態是繞x軸扭轉的z向運動,2階模態是繞z軸旋轉的x向運動,3階模態是水平的y向運動,4階模態是繞y軸扭轉的z向運動,其中,1~3階模態為本設計的主模態,4階模態為雜態。在本設計中,雜項模態的諧振頻率(26 517 Hz)遠大于主模態的諧振頻率(最大5 523 Hz),避免了雜項模態對主模態的干擾。
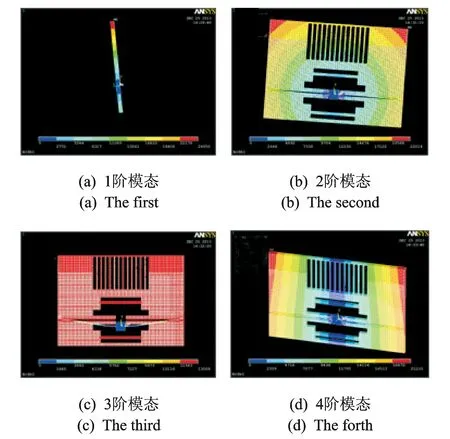
圖4 前4階模態Fig.4 The first four modals
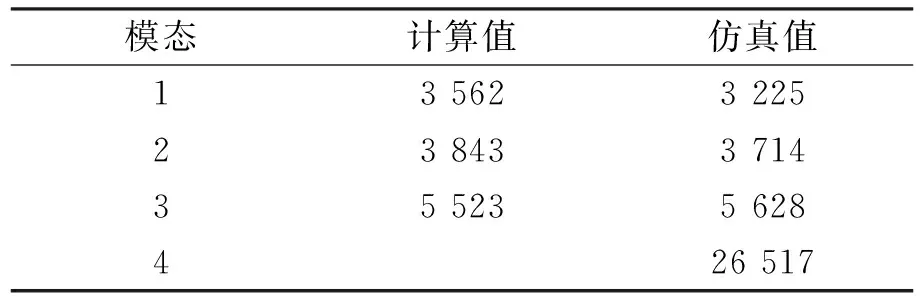
模態計算值仿真值135623225238433714355235628426517
靜力學分析結果如表3所示(施加1g加速度)。
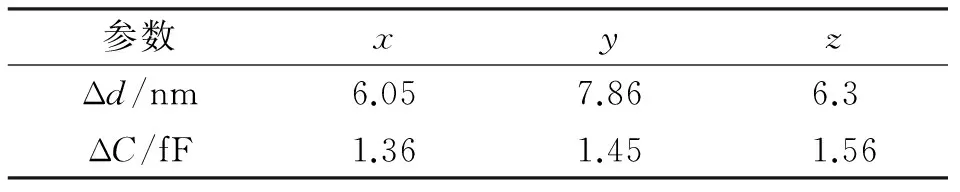
表3 位移變化和電容變化
由表3可知,結構在受到3個軸向的加速度時所產生的位移均在在6~8 nm之間,為保證3個軸向靈敏度的一致性,可通過調整初始電容值的方法來實現,各軸電容變化計算如表3所示。
在整個結構當中,受力最大的部分是在梁的兩端,因此需要驗證梁所受到的應力,保證其所受應力小于其許用應力強度。當受到16g加速度時,梁在不同情況下的最大應力如表4所示。
由表4可知,在受到相同加速度時,梁在承受y向加速度時產生的應力最大。在消費電子領域,器件所檢測的加速度值在16g以下,給器件施加16g的y向加速度,模擬得梁的最大應力為3.36 MPa。硅的斷裂強度為7 GPa,取安全因數值為3,由此算得硅的許用應力強度為2.3 GPa,遠大于16g時的應力,由此本結構滿足低g值的應用要求。

表4 梁在各軸加速度下的應力
3 加工工藝
本設計的加工工藝流程如圖5所示。A在拋光的晶圓上生成2~2.5 μm的氧化層,以作絕緣層使用,在絕緣層上沉積多晶硅層,并做圖刻蝕,制成埋入式電連接結構,用于傳感器向外部傳遞電位和電容信號。B在引線層上生成2 μm的氧化層,做犧牲層使用。C,D在氧化層上采用LPCVD沉積多晶硅種子層,并作圖刻蝕,形成和第一多晶硅層之間的通孔,用作厚多晶硅器件的錨定區,稍后制成錨定組件。E采用多晶硅外延,以生成20 μm的結構層。將F結構層上方拋平,沉積一層鋁,在此基礎上作圖刻蝕,以得到pad和鍵合區。G采用深反應離子刻蝕方法將結構層刻穿底部的氧化層,得到所設計的結構。H用VHF蒸汽去除犧牲層,釋放所設計的結構。
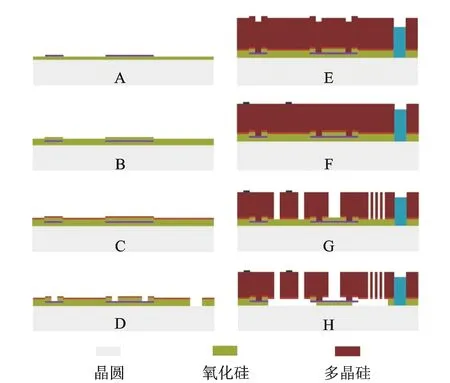
圖5 加工工藝流程Fig.5 Fabrication process
加工完成后的加速度傳感器如圖6所示。
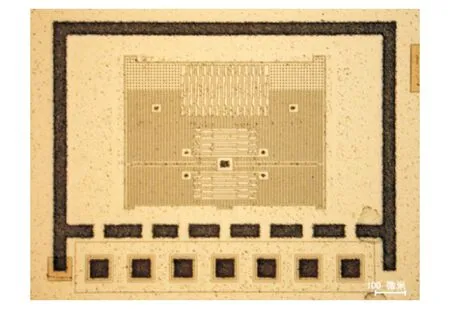
圖6 加工完成后的加速度計照片Fig.6 The finished accelerometer
4 測試結果
將加工完成的微加速度置于測試平臺上,測試其靜態電容和pull-in電壓,儀器所加的頻率為100 kHz,施加的電壓為0 V,靜態電容測試結果如表5所示(整片晶圓)。由表5可以看出,實際測試的單邊電容值和理論計算值比較接近,存在誤差的原因:a.加工過程中的根切現象;b.其他微小寄生電容的影響,起主導作用的是工藝因素,可以通過調節工藝參數進行改進。
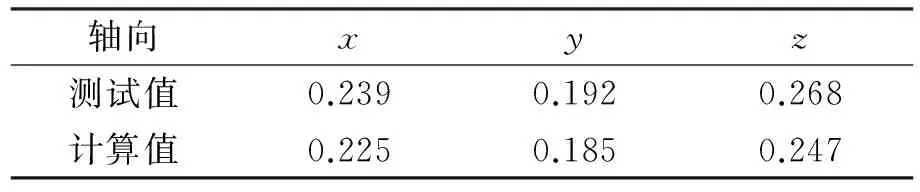
表5 單邊靜態電容測試值
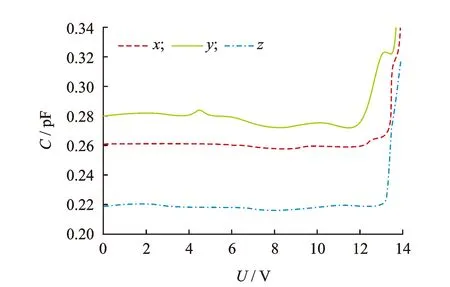
圖7 x,y,z軸pull-in電壓Fig.7 The pull-in voltages of x, y and z axis
Pull-in電壓測試結果如圖7所示。可以看出,當從0 V開始施加驅動電壓時,隨著電壓的增加,動梳齒逐漸向定梳齒移動,微小的位移量引起的電容變化量也很小,因此曲線前一段除小波動外,整體比較平穩,當電壓增大到一定值時,系統達到臨界點,再次增大電壓,動梳齒和定齒發生吸合,產生了電容的突變,曲線的后一段也很好地驗證了這一點。
表6為pull-in電壓測試值和理論計算值。由于pull-in電壓和極板的初始間距以及梁的尺寸有很大的關系[10],而兩者的尺寸精度是由加工工藝決定的,本工藝對器件會產生0.3~0.5 μm的根切,因此理論計算值和實際測量值有一定的誤差。后期可以通過設置加工裕度來保證梁和極板的間距在設計范圍內,從而使得測試值和理論值相符合。
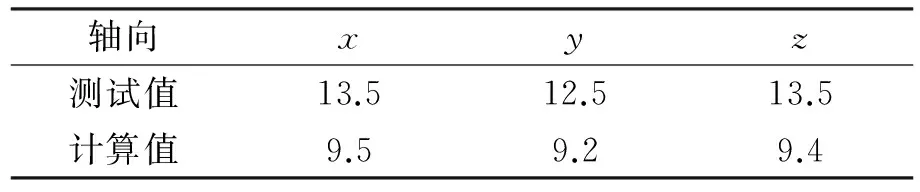
表6 Pull-in電壓測試值
將器件和ASIC打線后進行靈敏度測試,測試結果如圖8所示,從上到下分別是z軸±1g時的輸出值。根據ASIC和器件電容的等效關系(x,y軸為1.2 fF/g,z軸為1.5 fF/g),計算出的電容靈敏度如表7所示。
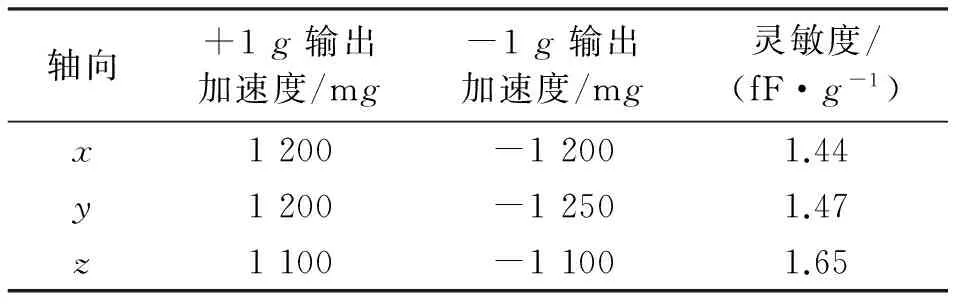
表7 各軸電容靈敏度數值
從表7可以看出,器件受到+1g加速度的輸出值和受到-1g加速度的輸出值在量值上相當接近,最大誤差僅為4%,測試的靈敏度較計算值大,考慮到由根切引起的靜態電容測試值偏大,測試的靈敏度較計算值大是在預期內的,后期設置加工裕度以保證兩者相符。
從圖8可以看出,當z軸有1g加速度輸出時,x,y軸向的輸出值為零。單個軸向的加速度對其他軸向沒有干擾。
本器件的量程為±16g,測試器件從0~16g的電容變化量,擬合散點,分析其非線性,測試結果如圖9所示。可以看出,三軸的電容變化量隨g值基本都是線性變化的,經計算非線性誤差為2.16% FS。
5 結束語
筆者介紹了一種基于單一敏感質量的三軸全差分電容式加速度計,采用單一的質量梳齒結構來檢測3個垂直方向的加速度。所設計的加速度計厚度為18 μm,大于傳統表面工藝加工出的厚度,降低了器件的熱機械噪聲,增大了檢測電容,提高了靈敏度和可靠性。ANSYS模擬和測試結果相符合,3個軸向的電容靈敏度分別為1.36,1.45,1.56 fF/g,機械熱噪聲分別為22.9,15.3,44.7 μg/Hz1/2,器件在3個軸向的靈敏度一致性好、分辨率高、抗干擾。該加速度計結構工藝簡單,在消費電子領域有較好的應用前景。
[1] Bao Minhang. Analysis and design principles of MEMS devices[M]. Netherlands: Elsevier Science, 2005:10-30.
[2] Beeby S P, Ensel G, Kraft G. MEMS mechanical sensors[M]. Boston, London: Artech House, 2004:173-192.
[3] Serrano-Vázquez F X, Herrera-May A L, Bandala-Sánchez M. Design and modeling of a single-mass biaxial capacitive accelerometer based on the SUMMiT V process[J]. Microsystem Technologies, 2013,19(12):1997-2009.
[4] Qu W, Wenzel C, Gerlach G. Fabrication of a 3D differential-capacitive acceleration sensor by UV-LIGA[J]. Sensors and Actuators A: Physical, 1999,77(1):14-20.
[5] 王守明,汪祖民.一種新型三軸電容式加速度計的設計分析[J].電子科技,2010,23(3):86-89.
Wang Shouming, Wang Zumin. The design and analysis of a new tri-axis capacitive MEMS accelerometer[J]. Journal of Electronic Science and Technology, 2010,23(3):86-89. (in Chinese)
[6] Xie J, Agarwal R, Liu Y, et al. A three-axis SOI accelerometer sensing with both in-plane and vertical comb electrodes[J]. Microsystem Technologies, 2012,18(3):325-332.
[7] Nonomura Y, Omura Y, Funabashi H, et al. Chip-level warp control of SOI 3-axis accelerometer with the zigzag-shaped Z-electrode[J]. Procedia Engineering, 2012,47:546-549.
[8] Acar C, Shkel A. MEMS vibratory gyroscopes: structural approaches to improve robustness[M]. New York: Springer, 2008:91-93.
[9] Zhuang Y X, Menon A. On the stiction of MEMS materials[J]. Tribology Letters, 2005,19(2):111-117.
[10]徐琳.靜電微執行器的Pull-in特性分析[D].南京:南京郵電大學,2012.
10.16450/j.cnki.issn.1004-6801.2015.05.021
*國家高技術研究發展計劃(“八六三”計劃)資助項目(2011AA040404);高等學校博士學科點專項科研基金資助項目(20133201110009);新世紀優秀人才支持計劃資助項目(NCET-13-0923)
2014-02-12;
2014-04-04
TH113.2; TH162; TN389
陳立國,男,1974年11月生,博士、教授、博士生導師。主要研究方向為微操作和微驅動機器人等。曾發表《Design, modeling and control of a piezoelectric ultrasonic microdissection technique for the molecular analysis of tissue》(《Smart Materials & Structures》2010,Vol.19,No.2)等論文。 E-mail:chenliguo@suda.edu.cn
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車觀察(2016年3期)2016-02-28 13:16:26
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00