單點(diǎn)系泊下船舶的運(yùn)動(dòng)數(shù)學(xué)模型
2015-03-14 11:09:56曾麗華
艦船科學(xué)技術(shù) 2015年2期
曾麗華
(重慶安全技術(shù)職業(yè)學(xué)院,重慶 404000)
單點(diǎn)系泊下船舶的運(yùn)動(dòng)數(shù)學(xué)模型
曾麗華
(重慶安全技術(shù)職業(yè)學(xué)院,重慶 404000)
摘要:隨著海洋開(kāi)發(fā)的深入,海上作業(yè)越來(lái)越多,研究單點(diǎn)系泊下船舶的運(yùn)動(dòng)模型并分析其運(yùn)動(dòng)規(guī)律,能有效控制環(huán)境干擾力對(duì)船舶運(yùn)動(dòng)的影響。本文通過(guò)建立單點(diǎn)系泊下船舶的運(yùn)動(dòng)數(shù)學(xué)模型,利用Maya建立船舶模型,以及利用Unity3D搭建虛擬環(huán)境來(lái)實(shí)現(xiàn)船舶的運(yùn)動(dòng)仿真。仿真結(jié)果驗(yàn)證了所設(shè)計(jì)控制器的有效性。
關(guān)鍵詞:?jiǎn)吸c(diǎn)系泊;Maya建模;Unity3D;虛擬現(xiàn)實(shí)
0引言
隨著海洋開(kāi)發(fā)日益深入,船舶海上作業(yè)也越來(lái)越頻繁,包括海洋考察、水產(chǎn)捕撈、油氣開(kāi)發(fā)等作業(yè)方式。采用經(jīng)濟(jì)可靠、結(jié)構(gòu)簡(jiǎn)單、使用和維護(hù)方便的系泊系統(tǒng),對(duì)于工程和特種作業(yè)的船舶來(lái)說(shuō)很重要。系泊系統(tǒng)可分為懸鏈線(xiàn)系泊、懸鏈線(xiàn)錨腿系統(tǒng)、單錨腿系泊、張力腿系泊、系纜樁——緩沖系泊等方式。按照系泊系統(tǒng)系泊點(diǎn)的個(gè)數(shù)不同,可以分為單點(diǎn)系泊系統(tǒng)和多點(diǎn)系泊系統(tǒng),本文主要研究單點(diǎn)系泊系統(tǒng)。
單點(diǎn)系泊系統(tǒng)指船舶通過(guò)1條系在船頭或船尾的系泊纜或者剛性搖臂與海上的1個(gè)系泊點(diǎn)相連接。目前,單點(diǎn)系泊系統(tǒng)被廣泛采用,主要是此系統(tǒng)有一定的抵抗海洋環(huán)境能力,可靠性高,經(jīng)濟(jì)性好。本文主要研究在單系點(diǎn)下建立船舶運(yùn)動(dòng)模型,及利用虛擬現(xiàn)實(shí)技術(shù)對(duì)船舶運(yùn)行進(jìn)行分析。
1概述
1.1 國(guó)內(nèi)研究現(xiàn)狀
目前,單點(diǎn)系泊系統(tǒng)研究已取得了一定成果。古文賢[1]研究了單點(diǎn)系泊船舶在海上產(chǎn)生偏蕩運(yùn)動(dòng)的原因以及所受到的外載荷的特性,同時(shí)對(duì)船舶的運(yùn)動(dòng)狀態(tài)進(jìn)行了比較系統(tǒng)的分析,得到了偏蕩運(yùn)動(dòng)的運(yùn)動(dòng)特點(diǎn)。卓永強(qiáng)[2]通過(guò)MMG模型建立船舶運(yùn)動(dòng)方程,對(duì)風(fēng)浪流作用下的船舶進(jìn)行了受力分析,利用蒙特卡羅理論模擬了單點(diǎn)系泊下船舶的運(yùn)動(dòng)走向,提出了一種比較實(shí)用的方法來(lái)對(duì)單點(diǎn)系泊下的船舶進(jìn)行安全評(píng)估。杜度[3]等人利用三自由度微分方程,在Simulink中進(jìn)行時(shí)域仿真模型,給出船舶隨時(shí)間運(yùn)動(dòng)時(shí)系纜剛性對(duì)系泊運(yùn)動(dòng)的影響。季春群等人[4]以懸鏈線(xiàn)描腿系泊系統(tǒng)(CALM)為例,探討了系纜索的長(zhǎng)度對(duì)單系泊穩(wěn)定性的影響,并利用時(shí)域分析的方法,對(duì)某一360 kDWT油船系泊在直徑為12 m浮筒上的CALM進(jìn)行分析計(jì)算。計(jì)算結(jié)果表明,隨著系纜索長(zhǎng)度的增加,油船的首搖運(yùn)動(dòng)明顯增大。
1.2 國(guó)外研究現(xiàn)狀
國(guó)外的單點(diǎn)船舶運(yùn)動(dòng)研究也有了長(zhǎng)足的發(fā)展,如英國(guó)、美國(guó)、日本都已經(jīng)建立了一整套完善的研究體系。日本的井上欣三將走錨的概率作為評(píng)價(jià)單點(diǎn)系泊下船舶的安全標(biāo)準(zhǔn),在風(fēng)浪等外力作用下,得到了單點(diǎn)系泊下船舶的概率密度系數(shù),但是該方法需要在水池中進(jìn)行試驗(yàn)才能得到具體的數(shù)據(jù),所以實(shí)用性較差。Bernitsas和Papoulias以Abkowitz三階數(shù)學(xué)模型為基礎(chǔ),研究了單點(diǎn)系泊系統(tǒng)的穩(wěn)定性和分叉問(wèn)題,研究了平衡點(diǎn)處的穩(wěn)定性、靜態(tài)和動(dòng)態(tài)分叉問(wèn)題。Gobat等采用一種新型的有限差分方法建立了纜索靜力學(xué)和動(dòng)力學(xué)方程,可廣泛用于水下水上的單點(diǎn)系泊系統(tǒng)。
2單點(diǎn)系泊下船舶的數(shù)學(xué)模型
本文建立船舶運(yùn)動(dòng)模型需要把船舶放在固定坐標(biāo)系和運(yùn)動(dòng)坐標(biāo)系中,研究船舶運(yùn)動(dòng)所用的參數(shù)、符號(hào)采用國(guó)際水池會(huì)議推薦及造船和輪機(jī)工程學(xué)會(huì)術(shù)語(yǔ)公報(bào)推薦的體系。
2.1 船舶運(yùn)動(dòng)學(xué)模型
1)固定坐標(biāo)系
由于受到外界力和力矩的作用船舶才能在海上航行,本文選取慣性參考系研究船舶的運(yùn)動(dòng),由于在地球局部運(yùn)動(dòng)的船舶其經(jīng)緯度近似固定,因此地球表面可以近似為慣性坐標(biāo)系,即固定坐標(biāo)系。固定坐標(biāo)系Eεηζ選取海上的任意一點(diǎn)為原點(diǎn)E, Eε指向正北方向,Eη指向正東方向,Eζ指向地心方向。
2)運(yùn)行坐標(biāo)系
當(dāng)船舶與海水等發(fā)生作用時(shí),固定坐標(biāo)系的使用就會(huì)受限,因此需要建立運(yùn)動(dòng)坐標(biāo)系,運(yùn)動(dòng)坐標(biāo)系固定在船體上,原點(diǎn)o選取在船的重心或者重心以外的點(diǎn)上,但是對(duì)于船舶來(lái)說(shuō),船體坐標(biāo)系的坐標(biāo)軸的方向與慣性主軸的方向一致。縱軸ox取在縱向剖面內(nèi),方向指向船首,平行于水線(xiàn)面;橫軸oy取與縱向剖面垂直,指向右,平行于水線(xiàn)面;垂直軸oz通過(guò)右手定則,取在縱向剖面內(nèi),指向船底方向。
3)坐標(biāo)系間的轉(zhuǎn)換
在固定坐標(biāo)系原點(diǎn)和運(yùn)動(dòng)坐標(biāo)系原點(diǎn)重合的情況下,可以做3次初等旋轉(zhuǎn)變換將固定坐標(biāo)系轉(zhuǎn)換到oxyz坐標(biāo)系下。
通過(guò)3次繞軸旋轉(zhuǎn)變換可以將固定坐標(biāo)系和運(yùn)動(dòng)坐標(biāo)系相互轉(zhuǎn)換:
ξ
η
ζ=S×x
y
z或者x
y
z=S-1×ξ
η
ζ。
(1)
式中旋轉(zhuǎn)變換矩陣為:
S=cosψcosθcosψsinφ-sinψcosφcosψsinθcosφ-sinψsinφ
sinψcosθsinψsinθsinφ-cosψcosφsinψsinθcosφ-cosψsinφ
-sinθsinφcosθcosφcosθ。
(2)
對(duì)于六自由度運(yùn)動(dòng)的船舶,需要6個(gè)獨(dú)立坐標(biāo)確定其位置和方向,前3個(gè)坐標(biāo)為x,y,z對(duì)時(shí)間的導(dǎo)數(shù),后3個(gè)坐標(biāo)為,對(duì)時(shí)間的導(dǎo)數(shù)。對(duì)于船舶這6種不同的運(yùn)動(dòng)可以定義為:3個(gè)平動(dòng):前進(jìn)、橫移、升沉;3個(gè)轉(zhuǎn)動(dòng):橫搖、縱搖、首搖。

表1 美國(guó)造船與輪機(jī)工程協(xié)會(huì)規(guī)定的船舶運(yùn)動(dòng)變量符號(hào)
4)船舶運(yùn)動(dòng)學(xué)模型
船舶六自由度運(yùn)行學(xué)方程可以表示為:
x=ucosψcosθ+v(cosψsinθsinφ-sinψcosφ)+
w(sin sinφ+cosψcosφsinθ),
y=usinψcosθ+v(cosψcosφ+sinφsinθsinψ)+
w(sinθsinψcosφ-cosψsinφ),
z=-usinθ+Vcosφsinφ+wcosθcosφ;
θ=p+qsinθtanθ+rcosφtanθ,
φ=qcosφ-rsinφ,
ψ=qsinφcosθ+rcosφcosθ,θ≠±90°。
(3)
上式改寫(xiě)成矢量形式為:
η=J(η)v,
式中J(η)等價(jià)于p·
Θ·=R(Θ)03×3
03×3T(Θ)U
Ω。
其中,
η∈R3×S3,v∈R6,
R(Θ)=cosψcosθ-sinψcos+cosψsinθsinφ
sinψsinφ+cosψcosφsinθ
sinψcosθcosψcos+sin sinθsinψ
-cosψsin+sinθsinψcosφ
-sinθcosθsinφ
cosφcosθ,
T(Θ)=1sinφtanθcosφtanθ
0cosφ-sinφ
0sinφ/cosθcosφ/cosθ。
2.2 船舶動(dòng)力學(xué)模型
由剛體的動(dòng)量定理,得到船體的平移運(yùn)動(dòng)方程:
(4)
由剛體的動(dòng)量矩定理,得到船體的旋轉(zhuǎn)運(yùn)動(dòng)方程:

(5)
式中:Jx, Jy, Jz分別為剛體繞坐標(biāo)軸xb, yb, zb的轉(zhuǎn)動(dòng)慣量;Jxy=Jyx, Jxz=Jzx, Jyz=Jzy分別為剛體對(duì)xb, yb軸,yb, zb軸和xb, zb軸的慣量積;第1項(xiàng)為剛體加速旋轉(zhuǎn)產(chǎn)生的慣性力矩;第2項(xiàng)為陀螺效應(yīng)產(chǎn)生的慣性力矩;第3項(xiàng)為附件力矩。
由式(4)和式(5)得到剛體動(dòng)力學(xué)方程矢量形式:
(6)
式中:v=[u,v,p,q,r]為速度矢量;τRB=[X,Y,Z,K,M,N]T=τH+w+wm+τ為外力和力矩的矢量。
3基于虛擬現(xiàn)實(shí)的單點(diǎn)系泊下船舶運(yùn)動(dòng)分析
虛擬現(xiàn)實(shí)技術(shù)是近年來(lái)出現(xiàn)的高新技術(shù),也稱(chēng)靈境技術(shù)或人工環(huán)境。虛擬現(xiàn)實(shí)是利用電腦模擬產(chǎn)生一個(gè)三維空間的虛擬世界,提供使用者關(guān)于視覺(jué)、聽(tīng)覺(jué)、觸覺(jué)等感官的模擬,讓使用者如同身歷其境一般,可以及時(shí)、沒(méi)有限制地觀察三度空間內(nèi)的事物。[7]
為了突出虛擬現(xiàn)實(shí)的沉浸感、真實(shí)感,本文利用Maya建模和Unity3D進(jìn)行虛擬環(huán)境的搭建。
3.1 Maya建模
Autodesk Maya是美國(guó)Autodesk公司出品的世界頂級(jí)的三維動(dòng)畫(huà)軟件,應(yīng)用對(duì)象是專(zhuān)業(yè)的影視廣告,角色動(dòng)畫(huà),電影特技等。Maya功能完善,工作靈活,制作效率極高,渲染真實(shí)感極強(qiáng),是電影級(jí)別的高端制作軟件。

圖1 三維建模流程圖Fig.1 Three-dimensional modeling of the flow chart
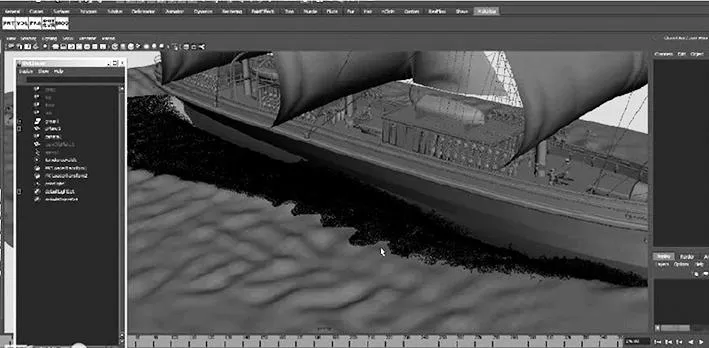
圖2 maya制作的船舶模型Fig.2 Ship models
圖2為本文用maya制作的船舶模型。
3.2 Unity3D虛擬現(xiàn)實(shí)技術(shù)
Unity3D是一個(gè)能夠輕松實(shí)現(xiàn)創(chuàng)作的多平臺(tái)虛擬現(xiàn)實(shí)開(kāi)發(fā)工具,能實(shí)現(xiàn)三維場(chǎng)景仿真、實(shí)時(shí)三維動(dòng)畫(huà)等類(lèi)型互動(dòng)內(nèi)容,其特點(diǎn)是引擎構(gòu)架好,各功能接口豐富,支持多平臺(tái)發(fā)布。
Unity3D的視覺(jué)編輯特點(diǎn)是能夠很好地與實(shí)際環(huán)境相匹配。其優(yōu)勢(shì)包括Unity3D帶有用戶(hù)便利的物理引擎來(lái)幫助實(shí)現(xiàn)現(xiàn)實(shí)世界中的重力等物理現(xiàn)象和場(chǎng)景中所需的逼真絢麗特技,所以它較適合快速開(kāi)發(fā)虛擬環(huán)境下的仿真系統(tǒng)。在本文涉及的虛擬船舶運(yùn)動(dòng)場(chǎng)景編輯中,需要編輯大量的prefab封裝對(duì)象以便于其他場(chǎng)景直接調(diào)用來(lái)提高系統(tǒng)的效率,在所有的gameobject對(duì)象中都有屬于它的特定屬性,同時(shí)把Unity3D的腳本綁定在對(duì)象物體上來(lái)控制它的運(yùn)動(dòng)。
3.3 基于虛擬現(xiàn)實(shí)的單點(diǎn)系泊下船舶運(yùn)動(dòng)分析
單點(diǎn)系泊下船舶運(yùn)動(dòng)模型施加以船舶運(yùn)行中簡(jiǎn)化后的激勵(lì)等以得到其驅(qū)動(dòng)響應(yīng)的方法可用來(lái)對(duì)船舶進(jìn)行動(dòng)力學(xué)仿真,分析現(xiàn)實(shí)中船舶運(yùn)行的穩(wěn)定性、平穩(wěn)性等,通過(guò)使用Unity3D腳本程序進(jìn)行相關(guān)的參數(shù)綁定,從而實(shí)現(xiàn)船舶的動(dòng)力驅(qū)動(dòng)等仿真。
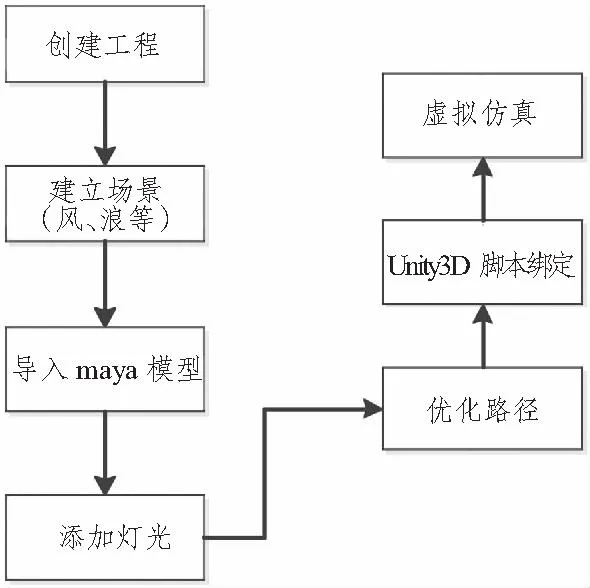
圖3 虛擬仿真流程圖Fig.3 Virtual simulation flow chart
利用以上流程圖驗(yàn)證單點(diǎn)系泊下船舶的平衡位置。
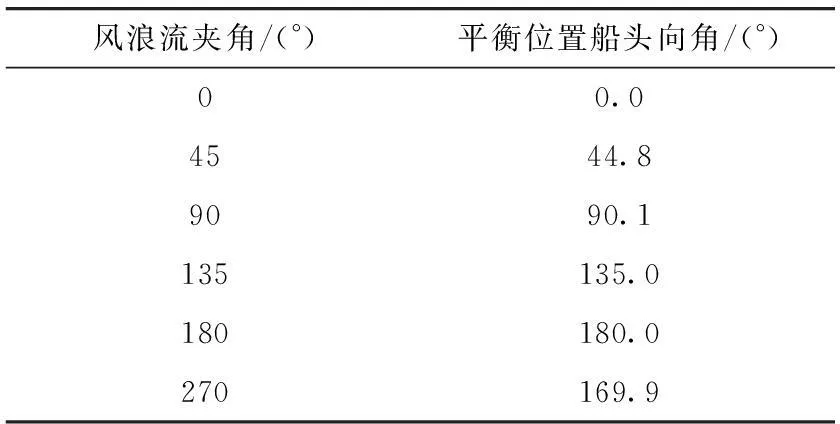
表2 船舶在風(fēng)浪影響下平衡位置驗(yàn)證
結(jié)果表明,單點(diǎn)系泊下建立的船舶運(yùn)動(dòng)模型在外界力的干擾下會(huì)在平衡位置做小幅度擺動(dòng),對(duì)于船舶的定位可靠。
4結(jié)語(yǔ)
本文研究了單點(diǎn)系泊下船舶的運(yùn)動(dòng)數(shù)學(xué)模型,利用maya建立船舶模型,以及利用Unity3D搭建虛擬環(huán)境來(lái)實(shí)現(xiàn)船舶的運(yùn)動(dòng)仿真,通過(guò)仿真結(jié)果驗(yàn)證了所設(shè)計(jì)的控制器有效性。
參考文獻(xiàn):
[1]古文賢.單錨泊船的偏蕩運(yùn)動(dòng)(一)[J].世界海運(yùn),1996(4):51-54.
[2]卓永強(qiáng),楊鹽生.船舶錨泊的安全評(píng)價(jià)[J].中國(guó)航海,1999(1):9-15.
[3]杜度,張緯康.單點(diǎn)系泊船舶運(yùn)動(dòng)的仿真研究[J].計(jì)算機(jī)仿真,2003(6):96-99,103.
[4]季春群,王磊,彭濤.單點(diǎn)系泊的系泊穩(wěn)定性分析[J].中國(guó)海洋平臺(tái),1998(Z1):12-14,69-70.
[5]井上欣三.關(guān)于提高風(fēng)浪中錨泊安全性的研究[J].航海題本航海學(xué)會(huì)志,1985(84):28-37.
Ship motion mathematical model and analysis of single point mooring ship
ZENG Li-hua
(Chongqing Vocational Institute of Safty and Technology,Chongqing 404000,China)
Abstract:In recent years, with the development of deep ocean, marine operations become more and more. Research mooring motion model and analyze the movement of single point mooring ship,which can affect the effective control of environmental disturbance forces on the ship movements. The paper establishes a mathematical model of single point mooring ship, use maya to model and utilize Unity3D to build virtual environments to achieve the ship motion simulation. The experimental results show that the effectiveness of the designed model.
Key words:single point mooring ship;Maya modeling;Unity3D;virtual reality
作者簡(jiǎn)介:曾麗華( 1980 - ) ,女,講師,研究方向?yàn)閿?shù)學(xué)教育。
收稿日期:2014-09-26; 修回日期: 2014-11-07
文章編號(hào):1672-7649(2015)02-0116-04
doi:10.3404/j.issn.1672-7649.2015.02.024
中圖分類(lèi)號(hào):U661.73
文獻(xiàn)標(biāo)識(shí)碼:A
