無人機編隊飛行技術研究*
2015-03-14 10:55:08張晉武
艦船電子工程 2015年8期
張晉武
(海軍裝備研究院 北京 100161)
?
無人機編隊飛行技術研究*
張晉武
(海軍裝備研究院 北京 100161)
無人機編隊執行復雜任務的性能和效率比單機高出許多,因而無人機編隊飛行已成為無人機應用技術發展研究的熱點問題。論文在分析無人機編隊飛行特點的基礎上,闡述了無人機編隊飛行原理與方法,將無人機編隊飛行過程歸結為編隊集結、編隊保持和編隊重組三個階段,分別對這三個階段的研究現狀進行了分析總結,并對無人機編隊未來的發展方向和研究挑戰進行了展望。
無人機; 編隊飛行; 編隊集結; 編隊保持; 編隊重組
Class Number V279
1 引言
無人機發展至今已經經過了幾十年,相關技術已經相對成熟,已經在軍事和民用領域中發揮重要的作用[1]。為了適應未來的挑戰,現今無人機技術的發展方向有兩個:一方面需要提高單機的功能和效率,比如發展多用途、長航時、高可靠等需求的無人機;另一方面需要在現有的技術的基礎上,發展更為高效的無人機管理和組織模式。基于此,無人機編隊飛行成為近年來提出的無人機合作化發展方向中的一個核心概念。
無人機編隊飛行[2],即多架無人機為適應任務要求而進行的三維空間排列和任務分配的組織模式,它既包括編隊飛行的隊形產生、保持和重組[3],也包括飛行任務的組織,可以根據外部情況和任務需求進行動態調整。無人機編隊飛行是無人機發展的一個重要趨勢,擁有廣闊的發展前景。
雖然無人機編隊飛行相較于單機而言,有很多優點,但是無人機畢竟不能完全自主和智能地調整自身飛行狀態,以高效地完成作戰任務。而且對于無人機編隊而言,各單機之間通信保障也是一個重要的考慮因素。本文將無人機編隊飛行劃分為編隊集結、編隊保持和編隊重組三個階段,并分析各個階段中的研究熱點和研究現狀。
2 無人機編隊飛行的特點
相較于單機而言,無人機編隊在氣動效率方面有很大的提升,可以有效提升編隊的航程[4]。因為處于跟隨位置的無人機的升/阻比得到明顯提升,從而使整個編隊的能源利用率得到提升。同時無人機編隊可以攜帶各類規格不同的裝備,以不同的編隊隊形,協作完成單無人機不能完成的任務,如高精度定位、多角度成像及戰區通信中繼等。一般來說,單無人機可以進行二維測繪作業,而無人機編隊按一定的隊形排列,采取一定的測繪方法測量則可以完成目標精確三維信息的采集。另外由于單機搭載的傳感器等設備有限,完成復雜任務時,必須分多次完成,影響任務執行效率,而如果是無人機編隊執行任務,只需要無人機組分散搭載設備,將任務分解,讓各個單機執行簡單任務即可[5]。而且當無人機因突發情況,比如單機被擊落或因機械原因無法繼續執行任務時,編隊飛行的無人機中備用的無人機仍然可以保證整個編隊繼續執行任務,這種可靠性和冗余度在復雜多變的任務中(特別是戰場)是十分有必要的,這也是無人機編隊相較無人單機作業的一個突出特點和優勢。如何有效地利用無人機編隊飛行的優點,正成為無人機應用技術研究的熱點。接下來分析無人機編隊飛行過程的三個階段的研究狀況。
3 無人機編隊飛行過程
3.1 編隊集結
編隊集結是指多個無人機從任一初始狀態,按一定約束條件,調整自身的飛行參數,以形成編隊隊形的過程。這一過程中,約束條件有很多類型: 1) 能耗最少; 2) 集結時間最短; 3) 避開障礙物和威脅; 4) 無人機之間的安全距離; 5) 各無人機的轉彎速度上下限; 6) 無人機之間通信狀況。按照這些約束條件和不同的任務類型,無人機可以編成各式隊形展開飛行作戰任務[6]。能耗是一個系統性因素,在任務危險程度不高,比如航跡區域安全時,可以在這個方面要求高一點。當然如果出現威脅無人機安全的情況,可以不太強調這方面的約束。時間也是一個很重要的約束條件,因為很多時候任務十分緊急,特別是作戰任務。當碰上緊急任務時,集結時間的要求會十分嚴格,因為作戰時機可能就只有很短的一段時間。編隊集結過程中,編隊也可能會遇到特殊空情或障礙,這時需要對編隊內所有無人機重新進行航跡規劃,以避開潛在威脅。不同隊形的氣動效應不盡相同,編隊內各無人機所受到氣動干擾也不相同,無人機飛行參數的設定也會相應不同,所采取的防碰撞策略也會相應不同,以避免無人機相互碰撞和保持編隊隊形。編隊轉彎時,各機的轉彎速度應控制好,不然不僅無法保持編隊隊形,還有可能導致撞機,這需要地面控制人員規劃好每架無人機的航線,對計算精度和時間的要求較高,特別是遇到緊急情況時。由于無人機飛行速度很快,對于通信的要求也相應較高,必須保證通信暢通。
編隊集結有兩種形式:一是作戰任務下達時,所有無人機在規定時間內從各自機場向預定目標區域集結;二是作戰任務完成時,所有無人機向各自基地返行,如果有多架無人機向同一個基地返行時,它們需要先集結,然后依次降落到基地。集結完成后,編隊就進入編隊保持階段,保持編隊隊形向預定作戰目標飛行。
3.2 編隊保持
編隊保持是指編隊飛行過程中,如何調整各個無人機的飛行參數,以保持編隊隊形不變。這是一個動態調整的過程,對任務執行十分重要,如需對目標進行精確定位打擊時,編隊隊形的保持就顯得尤為重要,如果隊形不能保持,會影響定位精度。編隊保持過程中有三個主要約束條件: 1) 有效避開障礙物和威脅區域; 2) 避免無人機之間碰撞; 3) 編隊內通信需要保障; 4) 要考慮無人機之間的氣動效應。
編隊因任務要求往往要保持其在隊列中的相對位置基本不變。一般的保持策略是編隊中的每架無人機保持與隊列中約定點的相對位置不變,而當這個約定點是領航機的時候,這個保持策略就稱為領航-跟隨者(Leader-Follower)策略[7]。在陣形保持過程中,可能會因一些干擾因素引起擾動,防止沖突策略就是要避免在擾動下可能發生的碰撞和信息交互中的阻塞。無人機組要保持一定的隊列形狀,它們之間必須有信息的交互。信息交互的控制策略一般有集中式控制、分布式控制和分散式控制,每一種方式都有其特點、優勢和適用場景。
1) 集中式控制策略
在集中式控制策略中,編隊中每架無人機都需要將自己的飛行參數,如位置、速度、高度、姿態等信息傳遞給編隊內所有無人機,因而編隊內每一架無人機都知道整個編隊隊形的所有信息。這樣做的好處是控制靈活性高、效果好,但同時由于信息交互量巨大,對機載計算機的性能要求高,系統的控制算法也相應復雜不少。
2) 分布式控制策略
在分布式控制策略中,編隊內每架無人機要只與相鄰的無人機交互各自的飛行參數。在這種情況下,每一架無人機所需要知道和處理的信息量就少很多,使得系統實現相對簡單,控制算法也不會很復雜,當然控制效果相對集中式控制來說要差一些。分布式控制策略又有三種不同的方法:
(1)領航-跟隨者策略是目前最為成熟的編隊控制策略了,其基本思想是在編隊中選擇一架無人機作為領航者,其余無人機均作為跟隨者,參照領航者的位置來調整自身飛行參數,以保持自己與領航者之間的相對位置不變,從而達到保持編隊隊形的目的。最為簡單的領航-跟隨者模型是編隊內所有無人機均以同一個領航者以參照。這樣由于每架無人機只需要跟隨領航者調整自己的飛行參數,計算量小,控制簡單。但缺點也顯而易見,如果領航者故障或損壞,編隊將完全無法運行。
(2)鏈式領航-跟隨者策略是一種改進型的領航-跟隨者策略,不需要所有無人機都參照同一領航者,而是參照其最近鄰居,如圖1所示。

圖1 鏈式領航-跟隨者策略
如圖1所示,無人機f1為首機,f2和f3只需要跟隨f1即可,與其保持相對位置不變,而f4、f5則分別跟隨f2、f4,它們可以組成若干個二機跟隨序列,每架飛機與自己的領航者進行通信。這樣如果有新機需要編入時,可以很好地兼容擴充。這樣雖然無法完全克服領航者問題,但可以在領航者失效的情況下,極大地將損失降低。
(3)虛擬領航-跟隨策略的思想是在編隊中找一個虛擬的固定點作為虛擬的領航者,所有的無人機都保持相對于虛擬領航者的位置不變。虛擬領航者在編隊中的位置是根據編隊隊形計算出來的,編隊飛行過程中,所有無人機都跟蹤虛擬領航者的狀態,并動態地調整飛行動態,以保持編隊隊形[8]。當編隊內有無人機因故需要退出編隊時,編隊內其它無人機會根據一定算法替補上,以保持編隊隊形不變。虛擬領航-跟隨者策略中,由于領航者是虛擬的,并不是實際的無人機,不存在其會損毀或故障的問題,可以有效克服領航-跟隨者策略下“領航者失效導致編隊無法運行”的問題。當然這種策略也有一些缺陷。由于虛擬領航者是虛擬出來的,其飛行參數很可能是數字模擬的,如果計算精度和算法性能不夠好的話,很可能在編隊轉彎時出現差錯,因為這時虛擬領航者的飛行航跡的曲率變化不連續,從而導致編隊所有無人機跟隨出現異常情況,使編隊隊形無法保持。因而在這種策略下,有必要設計一個好的轉彎模型,以防出現異常情況。
表1對這三種控制策略進行了對比,可以很直觀地看到各自的優缺點,在設計無人機編隊時,可以根據需求,選擇合適的策略,或者混合使用,以達到更好的效果。
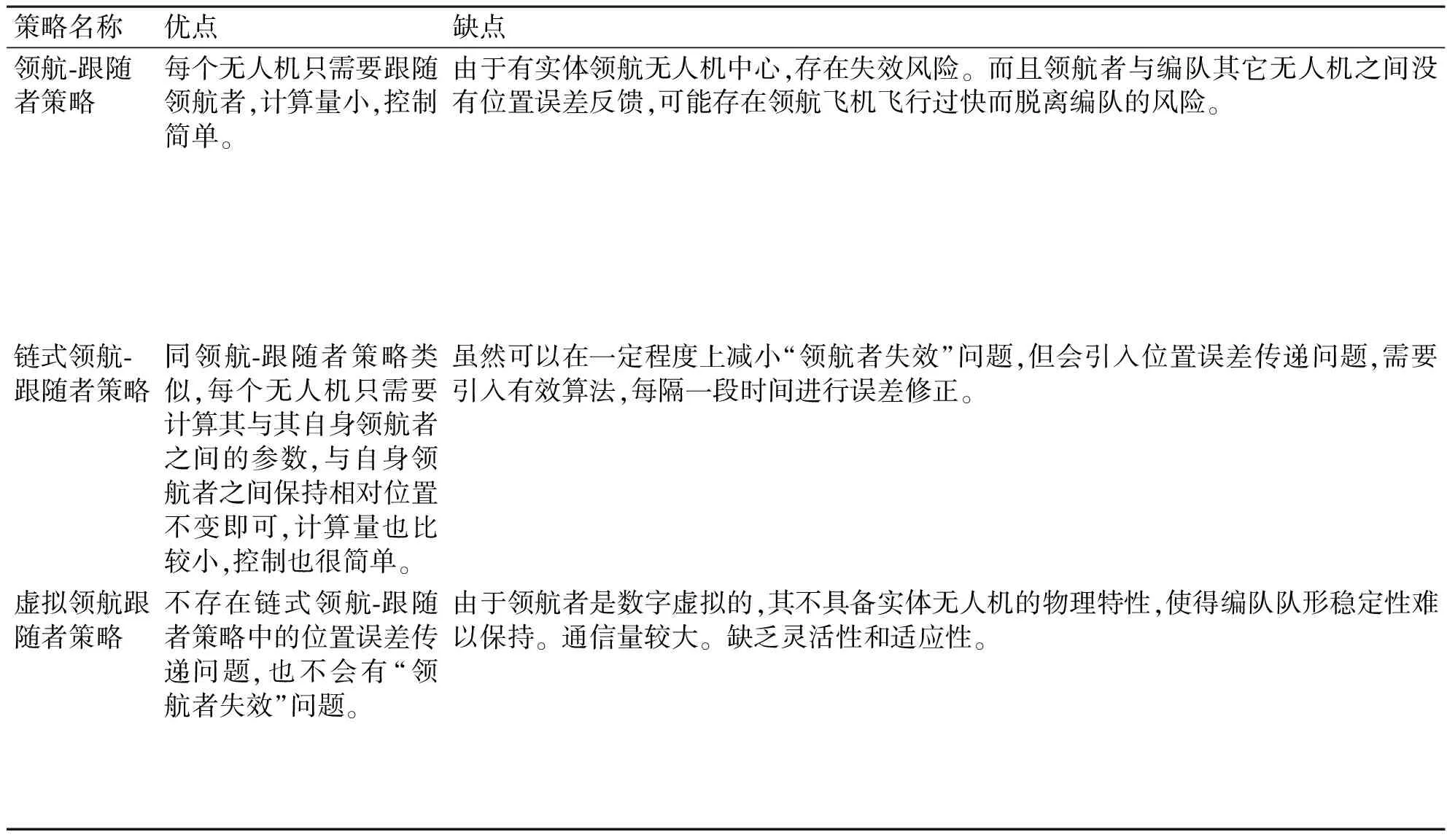
表1 三種編隊保持控制策略對比
3.3 編隊重組
編隊重組是指編隊飛行過程中,部分無人機因特殊原因,如機械故障、敵方火力打擊、障礙物以及目標情況發生較大變化時,需要暫時離開編隊,此時編隊隊形需要重新生成的情形。與編隊集結一樣,編隊重組也要考慮各種約束條件: 1) 重組時間最短; 2) 避免無人機之間碰撞; 3) 通信保障條件變化; 4) 無人機之間的氣動干擾;5)能耗最少等。
從編隊重組場景的角度來看,編隊重組問題可以分為以下三種類型。
1) 平衡編隊的燃油消耗。
由于空氣動力學的影響,使用領航-跟隨者策略進行編隊飛行時,跟隨者會比領航者節省燃油。為平衡編隊各無人機之間的燃油消耗,可以在編隊飛行過程中各無人機輪流充當領航者。可以參照計算機系統中的任務調度策略,讓編隊內所有無人機在不同的時候輪流做編隊領航者。最簡單的方法就是時間片輪轉,每隔一段時間,定期地切換領航者。與計算機一樣,切換本身也會增加燃油消耗,因此要控制好切換的頻率,以保持編隊執勤效率。考慮全面一點,可以依據每架無人機的飛行情況,來選擇領航者,如燃料最多者或最輕者或領航時間最短者等,這些都可以成為參考依據。
2) 遇到障礙物。
編隊飛行過程中,當遇到障礙物并且當前隊形無法正常通過時,就需要改變編隊隊形以保證所有無人機能夠安全通過障礙物。比如,當三角形狀的長僚機編隊遇到障礙物并且直接無法通過時,可以命令僚機依次跟隨在長機之后,將隊形變成線形隊形,依次通過障礙區即可。通過障礙物之后,再令編隊恢復原來的隊形。當然,也可以根據計算機離散數學圖論理論,將當前編隊隊形視作一個剛性大圖,在遇到障礙物時,將編隊分離成幾個小的編隊,每個小的編隊分別是一個剛性小圖。越過障礙后,再合并成原隊形。這個過程中,也要考慮編隊執勤的效率,因為各小編隊在重組一個大編隊時,需要考慮的因素也很多。
3) 編隊中部分無人機故障或損毀
當編隊中部分無人機無法繼續執行任務時,編隊重組可以分為兩種形式:一是尋找替代無人機頂替,繼續保持原隊形執行任務;二是編隊變形成全新的隊形,繼續執行任務。替代無人機可以參照仿生學,依照鳥類飛行規律,由最后的無人機來填補,也可以選擇受氣流影響最大或處于最不利位置的無人機來填補,這樣可以大大提高編隊飛行效率[9]。而當損失達到一定程度,編隊需要變換成全新隊形,以繼續執行任務。這時需要使用一些高效的算法來使編隊迅速組成新隊形繼續執行任務,可應用的有自適應遺傳算法等。利用這些算法,可以高效迅速地重組我方編隊隊形,從而充分發揮我方編隊的優勢。
4 結語
無人機編隊飛行研究涉及了許多領域,如仿生學、空氣動力學、自動控制、通信、導航、雷達、圖像處理、航跡規劃、人工智能等,是一個復雜的綜合性研究課題,需要相關領域的科研人員合作才能完成。雖然對無人機編隊飛行的研究已經取得了不少研究成果,但距離真正的無人機編隊自主飛行還很遠。對無人機編隊飛行的研究應繼續深入對編隊內部無人機之間的協同機制[10]的研究,由于編隊中每個無人機只是依賴有限或局部的信息進行決策,因而在一些特定情況下,無人機之間的控制決策有可能發生沖突,特別是編隊規模變大之后。這時就需要一個有效的協同機制來排除潛在沖突,而現有的這方面的研究還相對不多,可以做一些更深入的研究工作。
[1] 嵇亮亮.無人機引導及協同編隊飛行控制技術研究[D].南京:南京航空航天大學,2008.
[2] 朱戰霞,袁建平.無人機編隊飛行問題初探[J].飛行力學,2003,21(2):5-12.
[3] 熊偉,陳宗基,周銳.運用混合遺傳算法的多機編隊重構優化方法[J].航空學報,2008(s1):209-214.
[4] 牟勇飚.無人機編隊飛行中的氣動耦合問題研究[D].西安:西北工業大學,2006.
[5] 劉金星,佟明安.多架無人作戰飛機攻擊行為的協調[J].飛行力學,2003,21(2):16-19.
[6] 沈娟,王蒙.美國的多無人機自主協同作戰項目[J].飛航導彈,2008(8):39-42.
[7] 何真,陸宇平.無人機編隊隊形保持控制器的分散設計方法[J].航空學報,2008,29(sup):55-60.
[8] 李廣文,蔣正雄,賈秋玲,等.分布式多無人機編隊控制系統仿真[J].計算機仿真,2010,27(2):101-117.
[9] 吳霞.小衛星編隊飛行隊形控制與仿真[D].北京:中國科學院研究生院,2006.
[10] Schumacher C J, Kumar R. Adaptive Control of UAV in Close-Coupled Formation Flight[C]//Proceedings of IEEE American Control Conference, Chicago, Illinois,2000:849-853.
Technology of Unmaned Aerial Vehicles(UAVs) Formation Flight
ZHANG Jinwu
(Navy Equipment Research Institute, Beijing 100161)
Research of UAVs formation is an hot spot in the field of research on application technology development of UAV, because performance and efficiency of UAVs formation is much higher than that of single aircraft when carrying out complicate task. Based on the flight characteristic of UAVs formation, principle and method of UAVs formation flight are illustrated. UAVs formation flight is divided into three steps, including formation forming, formation holding and formation regrouping. After discussing each research situation of stage, the future research direction, challenges and tendency are proposed.
unmaned aerial vehicle, formation flight, formation forming, formation holding, formation regrouping
2015年2月8日,
2015年3月27日
張晉武,男,博士,高級工程師,研究方向:作戰系統、信息系統。
V279
10.3969/j.issn1672-9730.2015.08.003
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
