捷聯航姿系統航行狀態下的組合對準算法研究*
2015-03-14 09:23:20李瑩楊新李波
艦船電子工程 2015年2期
關鍵詞:系統
李 瑩 楊 新 李 波
(1.92941部隊95分隊 葫蘆島 125001)(2.北京西三環中路19號 北京 100841)(3.天津市公安邊防總隊 天津 300457)
?
捷聯航姿系統航行狀態下的組合對準算法研究*
李 瑩1楊 新2李 波3
(1.92941部隊95分隊 葫蘆島 125001)(2.北京西三環中路19號 北京 100841)(3.天津市公安邊防總隊 天津 300457)
由于捷聯航姿設備無緯度解算值,導致跨緯度航行時航向誤差過大,引入計程儀速度與航姿設備輸出姿態、航向一起對緯度值進行計算,航行狀態引入計程儀信息后建立數學模型進行初始對準,經航行實驗驗證,72小時內航向角誤差得到了極大的縮小,驗證了該數學模型的可行性,可提高設備的精度,具有實際使用意義。
捷聯航姿; 姿態矩陣; 數學模型; 計程儀速度; 卡爾曼濾波器
Class Number U666.1
1 引言
慣性導航系統是根據測得的運載體的加速度,經過積分運算求得速度與位置的,為此,必須知道初始速度和初始位置。此外,以地理坐標系為導航坐標系的慣導系統(包括平臺式和捷聯式),物理平臺和數學平臺都是測量加速度的基準,而且平臺必須準確地對準和跟蹤地理坐標系,以避免由平臺誤差引起加速度測量誤差。在慣導系統加電啟動后,平臺的三軸指向是任意的,可不在水平面內,又沒有確定的方位,因此在系統進入導航工作狀態前,必須將平臺的指向對準,此過程便稱為慣導系統的初始對準[1~3]。初始對準的精度直接關系到慣導系統的工作精度,初始對準的時間是慣導系統的重要戰術技術指標。由于航姿設備無緯度解算值,需要引入外部位置信息或速度信息,同時,在幾乎所有艦艇上均有計程儀設備,本文基于此引入計程儀速度與航姿設備輸出姿態、航向一起對跨緯度值進行計算,經實際使用證明可大幅提高航姿設備的精度。
2 精對準方程的建立
對于捷聯系統,由于捷聯矩陣起到了平臺的作用,因此導航工作一開始就需要獲得捷聯矩陣的初始值,顯然捷聯系統的初始對準就是確定捷聯矩陣的初始值。捷聯式的姿態矩陣實際上是運載體坐標系和地理坐標系之間的方向余弦矩陣。由于粗對準確定的姿態矩陣還有較大誤差,因此實際建立的導航坐標系n′與理想導航坐標系n仍存在偏差角,即失準角φ[4~5]。精對準就是估計出失準角,對粗對準確定的姿態矩陣做一次性修正。
在組合濾波精對準中采用Kalman濾波器進行狀態估計,需要建立航姿設備的對準階段誤差模型[6~7]。
采用地理坐標系作為導航坐標系時簡化的誤差模型為

(1)
式中:φe,φn,φu為計算導航坐標系和導航坐標系之間的失準角;δVe,δVn為載體東向和北向速度誤差;Ve,Vn為載體的東向速度和北向速度;Rm,Rn為載體所在點的子午曲率半徑和卯酉曲率半徑;L,ωie分別為當地地理緯度和地球自轉角速度;fe,fn,fu為比力在導航坐標系下的投影;εe,εn,εu為陀螺的器件誤差,εx,εy,εz在導航坐標系下的投影有
在對準階段,捷聯航姿設備的誤差模型中包括陀螺和加速度計的器件誤差。器件誤差包含三種分量:隨機常值誤差、一階馬爾可夫過程和白噪聲誤差。馬爾可夫過程的相關時間一般大于1小時,所以這種誤差可近似視為隨機常數,且與隨機常值漂移相比小1~2個數量級。所以,陀螺和加速度計誤差模型可簡化為
(2)

(3)
式中的狀態向量和系統噪聲分別為
(4)
3 航向狀態下組合對準模型的建立
由于航姿設備無緯度解算值,需要引入外部位置信息或速度信息[8~9],同時,在幾乎所有艦艇上均有計程儀設備,可引入計程儀速度與航姿設備輸出姿態、航向一起對跨緯度值進行計算,艦艇跨緯度值由艦艇航行情況確定。
外部計程儀提供準確的參考水平速度信息,航姿設備工作在捷聯慣性導航階段,實時解算出水平速度,解算出水平速度與外部參考速度之差作為觀測量,則觀測方程為
Z(t)=H(t)X(t)+ν(t)
(5)
連續的動態系統需離散化后才能在機上運行,式(3)與式(5)所描述的系統的離散化形式為
(6)
式中Φk,k-1為一步轉移矩陣;Wk為系統激勵白噪聲序列;Vk為量測白噪聲序列,δVk為不確定性輸入(外界環境所造成的隨機干擾輸入)。同時Wk、Vk滿足:
(7)
下面給出離散卡爾曼濾波方程:
1) 狀態一步預測:
2) 狀態估計:
3) 濾波增益:
4) 一步預測均方誤差:
5) 估計均方誤差:
系統由于存在不確定性量測輸入(隨機干擾),為了保證卡爾曼濾波的性能,濾波方程中用調諧后的R*陣代替R陣,由于R*的調諧有一個相當大的范圍,因此可以通過仿真確定R*陣。

(8)
4 航行試驗和仿真試驗結果對比
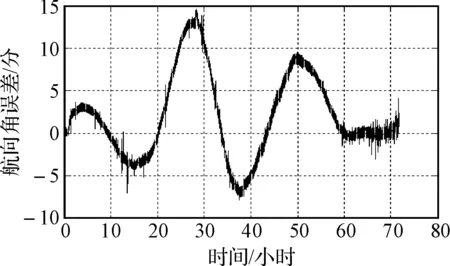
圖1 組合計程儀信息的航行對準后繼續航行72h的航向一次差曲線
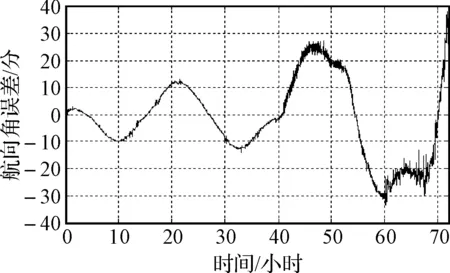
圖2 未組合計程儀信息的航行對準后繼續航行72h的航向一次差仿真曲線
論文進行了航行狀態下的組合對準方法實驗,并繼續航行了72h,航向一次差曲線如圖1所示。隨后使用該實船錄取的數據,進行了未組合計程儀信息的事后仿真,時間同樣為72h,一次差曲線如圖2所示。
5 結語
綜上所述,對比圖1和圖2可以看出,航行狀態引入計程儀信息后,72小時內航向角誤差得到了極大的縮小,極大的提高了設備精度,驗證了該數學模型的可行性。
[1] 黃德鳴,程祿.慣性導航系統[M].北京:國防工業出版,1986.
[2] 萬德鈞,房建成.慣性導航初始對準[M].南京:東南大學出版社,1998.
[3] 鄭梓禎,蔡迎波.艦艇導航系統試驗與鑒定[M].北京:國防工業出版社,2005.
[4] 秦永元.慣性導航[M].北京:科學出版社,2006.
[5] KOHEI O.Initial Rapid Alignment/Calibration of a Marine Strapdown Inertial Navigation System under Motion[C]//Symposium Gyro Technology.Stuttgart,Germany,1993.
[6] 魏偉,秦永元,張曉東,等.卡爾曼濾波系統和量測噪聲自適應估計的關聯性[J].測控技術,2012,30(12):98-103.
[7] Jwo Dahjing,Wang Shenghang.Aptive fuzzy strong tracking extended Kalman filtering for GPS navigation[J].IEEE Sensors Jounrnal,2007,7(5):778-789.
[8] 李魁,王瑋,劉芳,等.長航時慣導系統全阻尼綜合校正算法[J].儀器儀表學報,2012,33(3):543-548.
[9] 趙龍,魏宇康,劉生炳,等.基于外測速度信息修正SINS姿態誤差的H∞控制設計方法[J].導彈與航天運載技術,2014,334(4):28-31.
Integrated Algnment Algorithm of the Strapdown Attitude System in Sailing
LI Ying1YANG Xin2LI Bo3
(1.Unit 95,No.92941 Troops of PLA,Huludao 125001)(2.No.19 Central Xisanhuan Road,Beijng 100841)(3.Border Control Bureau of Tianjin Public Security,Tianjin 300457)
The strapdown attitude system has no latitude to be calculated,causing heading’s errors too large when the warship is cross-latitudes sailing.Log’s velocity with attitude and course of the strapdown attitude system is imported to calculate latitude,then mathematics model is established to process the initial alignment.Through sailing test,course error’s swing reduced much in 72h,the possibility of the mathematics’ model is verified that it can raise the accuracy of the system and has actual usage meaning.
strapdown attitude,attitude matrix,mathematics model,log’s velocity,Kalman filter
2014年8月3日,
2014年9月11日
李瑩,女,工程師,研究方向:慣性導航系統試驗與數據處理。
U666.1
10.3969/j.issn1672-9730.2015.02.016
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32