MAS技術下的海洋平臺項目重量控制系統
2015-03-23 06:56:48李敬花李凌堯孫苗苗尹寶瑞
哈爾濱工程大學學報 2015年10期
關鍵詞:系統
李敬花,李凌堯,孫苗苗,尹寶瑞
(1.哈爾濱工程大學船舶工程學院,黑龍江哈爾濱150001;2.海洋石油工程(青島)有限公司設計部,山東青島266520)
作為海洋平臺項目管理中關鍵一環,重量控制貫穿于平臺建造的全生命周期,是保證項目按期完工、按質交付的重要組成部分[1]。在實際的海洋平臺建造過程中,結構局部調整等因素往往導致設計時的平臺結構重量、重心與實際落成時存在一定差別,給工程作業帶來了嚴重的安全隱患[2]。然而,實施行之有效的重量控制管理存在較大難度,具體表現于數據采集及處理信息量大,重控文件使用周期長、頻率高,牽涉部門多、專業廣等方面。
傳統重量控制方法主要存在以下2個問題:1)各種數據主要靠事后采集匯總;2)實時性、集成性與可視化程度低[3]。現有的研究更多側重于重量、重心控制的措施或精度調整方面[4-6],這些研究詳細地闡述了海洋平臺建造過程中關于重量、重心偏差的調整問題及解決方法,但對于重量控制流程關注不足;也有學者研究并設計重量控制系統來解決數據接口問題[7]和提高管理效率[8-9],但其偏重系統模塊建立與分析,未能實現完整應用的重量控制系統。
對此,在明確海洋平臺項目重量、重心的控制流程基礎上,利用多智能體(multi-agent system,MAS)技術作為新的運行模式,將大而復雜的重量控制系統建設成聚合協作的智能管理系統[10],實現動態靈活、快速響應的重量控制具有一定的工程意義。
1 海洋平臺項目重量控制流程
在海洋工程裝備制造企業內部,海洋平臺的重量控制管理是在設計部和施工部門間形成的一個不斷計劃、調整、跟蹤、控制的循環過程。為描述平臺建造全生命周期中的重量控制過程,明確各職能部門交互關系,采用UML建立重量控制業務流程圖,如圖1所示。
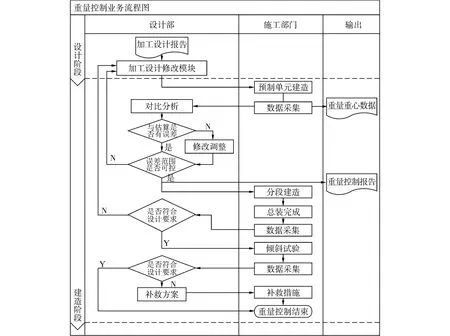
圖1 基于UML的重量控制業務流程圖Fig.1 Weight control flow chart based on UML
在設計階段,設計部對詳設方案進行加工設計,建立重量、重心模塊理論模型,并生成各預制單元重量、重心的理論值。在項目進行過程中,設計部還要根據現場情況(設備、場地及材料等)的反饋信息進行修改,在圖中體現為修改模塊。
在建造階段,施工部門依據圖紙、工單進行平臺建造,完成重量、重心數據采集工作。若理論值與實際值的誤差范圍超出裕度則需要返回到設計修改模塊。若重量重心均符合要求,則編制相應的重量控制報告。總裝和傾斜試驗時仍需進行前述控制過程,此時若不符合要求,設計人員需立即提出補救方案。
2 基于MAS的重量控制系統模型
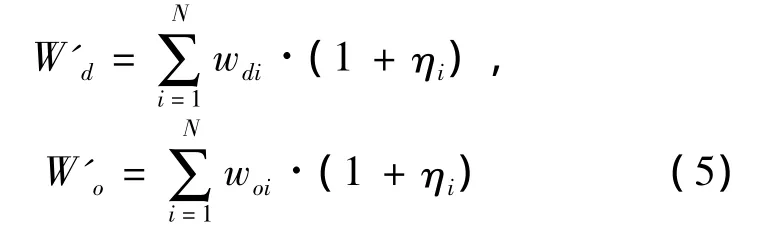
海洋平臺項目重量控制不僅要求參與重控的各個部門/專業完成其相應的局部控制目標,同時還要兼顧協同完成全局的重量、重心控制任務。將MAS理論應用于海洋平臺項目重量控制過程,即以A-gent來表示參與重量控制過程中的各邏輯資源或物理資源,利用網絡結構將Agent鏈接成一個MAS形式的控制系統,可解決重量控制過程中所呈現的復雜性、動態性、多專業交互并行性等問題。可采用功能映射法(functional mapping method,FMM)對重量控制系統進行建模,海洋平臺項目重量控制系統OPMAWCS(offshore platform multi-agent weight control system)模型如圖2所示。系統粒度劃分是依據所要實現的功能將系統劃分為各職能Agent。據圖2,OPMAWCS系統粒度劃分結果如表1所示。
3 系統重控原理及體系結構
3.1 系統重控原理
重量控制是以構成海洋平臺組塊的預制單元為對象,通過對重量、重心實際值和理論值的對比分析,從而達到各單元及組塊的重控目標。DCA將從X-Steel軟件或者現場重控數據采集設備中獲取重量、重心數據并通過IA導入OPMAWCS中。然后,系統實現重量控制的原理如下:
1)CA計算搭載后所構成組塊的重量及重心坐標。這里,假設某一海洋平臺組塊中所含有的單元數為N,單元重量理論值為wdi、ηi為各個單元的裕度因子(考慮風載、浪載等影響因素留有的裕度范圍),其重心坐標分別為xdi、ydi、zdi,該組塊的重量、重心理論值分別為
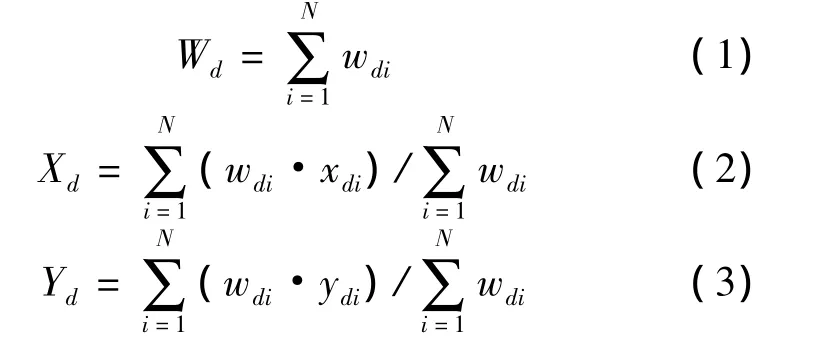

同理,計算得該組塊的重量、重心實際值Wo、Xo、Yo、Zo。該組塊重量計及裕度的理論值和實際值分別為
組塊重量、重心實際值和理論值的差表示為


2)MA可設定誤差接受度λ,若DW>λ,則提示報警,給出預警范圍,并提供一定的預警分析;若DW≤λ,則重量控制符合要求。對重心預警同理。
3)隨著組塊搭載成海洋平臺,WCA和GCA會記錄重量、重心變化趨勢;RA會根據操作人員需求生成相應的重控報告。
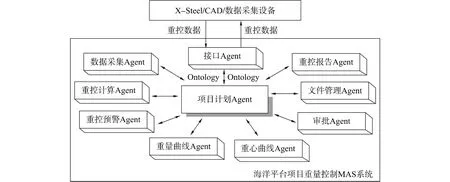
圖2 基于MAS的海洋平臺重量控制系統模型Fig.2 Weight control system model based on MAS
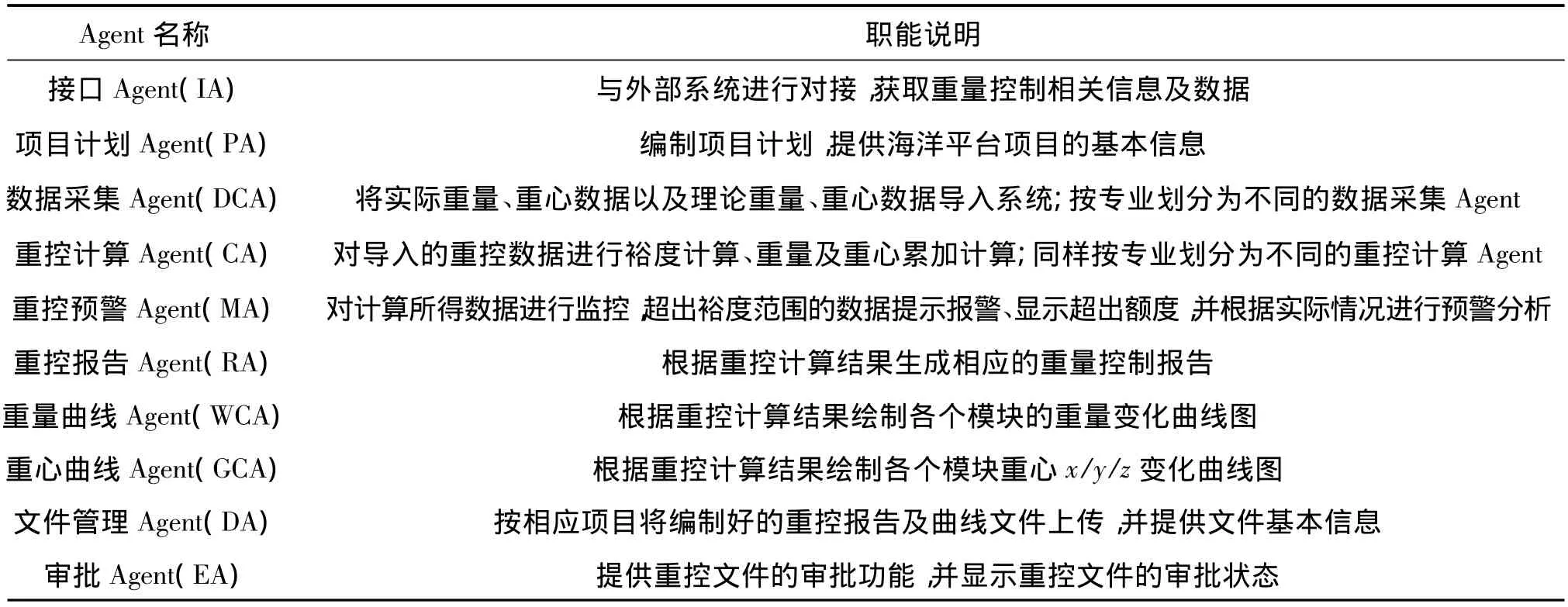
表1 OPMAWCS系統粒度劃分Table 1 Granularity design of OPMAWCS system
3.2 Agent內部結構
OPMAWCS中Agent采用混合型結構(hybrid architecture)如圖3所示,能夠較好地滿足海洋平臺項目重量控制過程中快速響應、協同控制等要求。
Agent通過傳感器感知作業環節、接收并傳遞重控數據及文件到信息處理單元,并由其完成消息處理、任務定義和決策:XML(extensive makeup language)分析器與KQML(knowledge query and manipulation language)分析器相結合將消息轉換為本地的語義表達;任務定義包含任務過程定義(如CA關于重量、重心的計算操作)和參數定義(如MA對誤差接受度的定義);確定任務后Agent從知識庫、數據庫中調用算法和數據,對任務進行操作決策。一經決策后,Agent中的執行器執行相應任務,并由執行監控器監控其準確性。此外,Agent結構中還包含通信模塊和人機接口。通信模塊根據系統定義的通信語言,使Agent通過消息/對話的方式實現信息交互。人機接口是使Agent通過與用戶的對接,將重量控制處理結果實時地反饋給用戶。
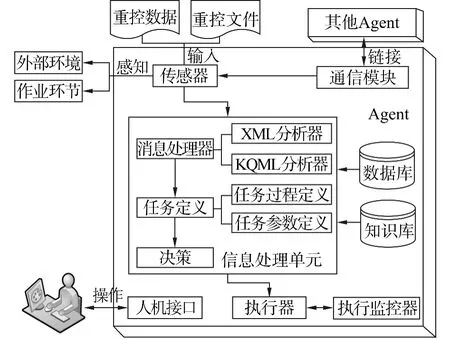
圖3 OPMAWCS系統中Agent內部結構Fig.3 Internal structure of agents in OPMAWCS
3.3 系統體系結構
系統體系結構不僅反映了重量控制過程中系統的工作流程和邏輯結構,也體現了系統內部協同運作方式。OPMAWCS系統體系結構如圖4所示。
OPMAWCS采用了層次結構與完全自治結構相結合的混合結構,各層次間通過Agent間的協同運作完成重量控制決策目標;在各個層次內部,又劃分為互聯的不同子MAS結構。OPMAWCS系統具有良好的智能性及柔性特點,體現在Agent不僅具備重控數據處理、決策指標和重控邏輯的智能運作能力,還具備通過協同來感知外部變化,自上而下調整重控數據處理結果的自主能力。
4 系統運行機制
OPMAWCS的運行依賴于Agent間的通信與協作。Agent間的通信實現了信息的交互及傳遞,有利于Agent對變化的快速響應;而各子MAS下的不同專業Agent通過協作實現了各模塊功能,同時各個子MAS間的彼此協同構成了一個完整的重量控制系統,達到全局重量控制決策目標和控制要求,有利于提高了海洋平臺項目重量控制效率。
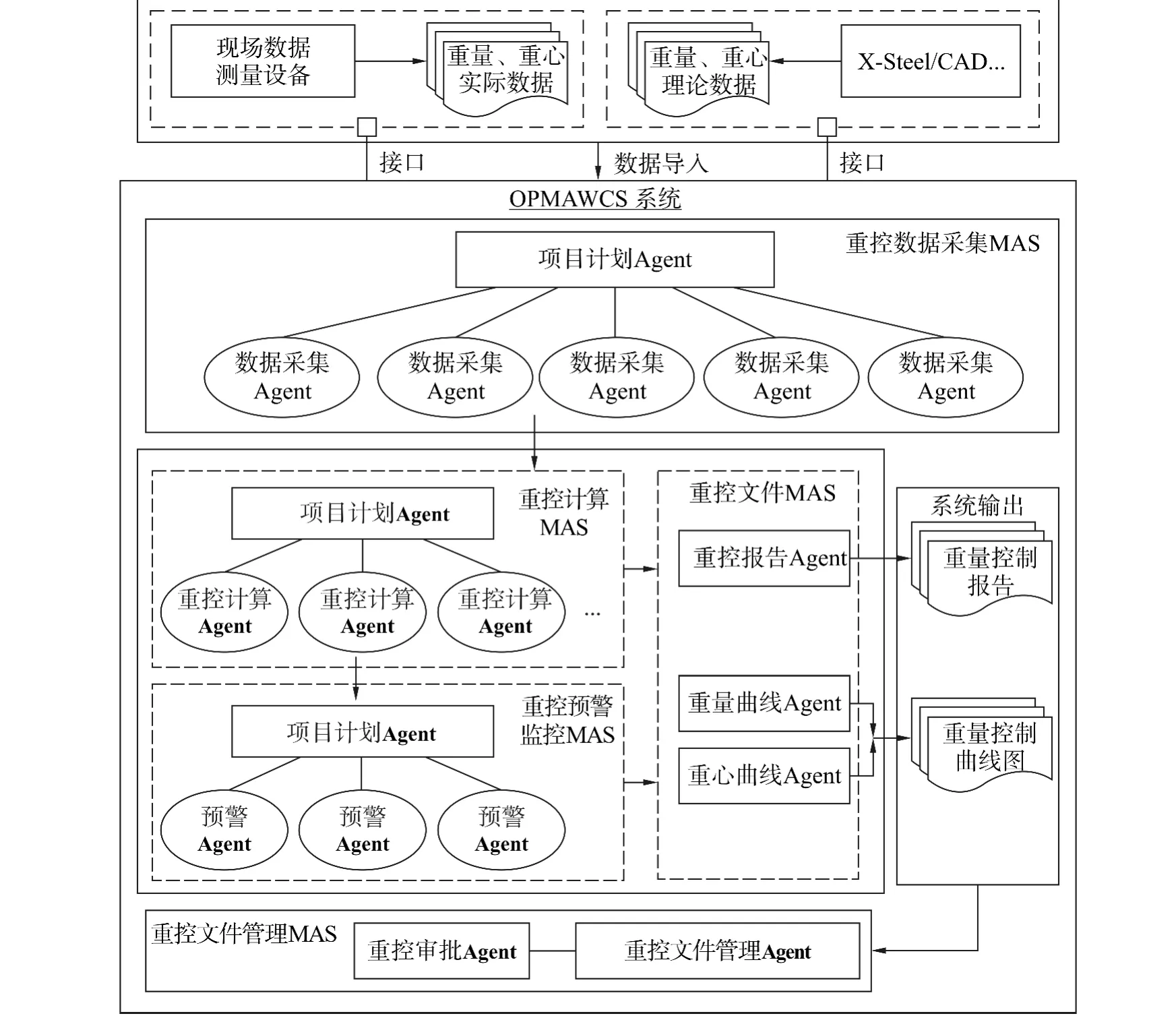
圖4 OPMAWCS系統體系結構Fig.4 System architecture of OPMAWCS
4.1 Agent通信
Agent間的通信是通過消息傳遞的方式實現的,消息格式采用XML格式,語言采用KQML語言。這主要是因為其支持動態的、異構的、含大量自主節點環境下的知識信息共享與重用[11],非常適合處理重量控制過程中大量數據信息。
KQML依據Speech Act理論對Agent的通信言語行為進行分類,通過定義行為原語的方式來規范Agent最基本的言語行為。圖5給出了OPMAWCS系統中Agent通信實例:CA向MA發送了一條關于組塊Upper Deck中預制單元CEP-F-2720的重量理論值和實際值的確認信息。
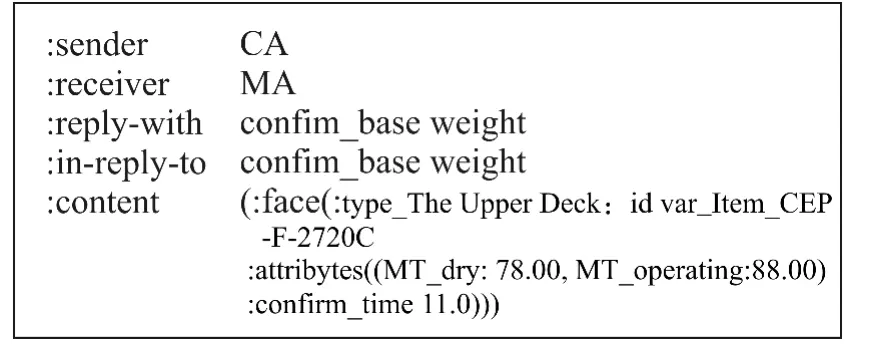
圖5 OPMAWCS系統中Agent通信實例Fig.5 Communication example between agents in OPMAWCS
4.2 Agent協作
Agent間的協作保證了系統整體性,以實現重量控制決策目標,達到對海洋平臺重量控制的要求。OPMAWCS的運行過程是由重控數據采集MAS、重控計算MAS、重控預警監控MAS、重控可視化MAS以及重控文件管理MAS協作完成的,其協作運行模型如圖6所示。
外部系統將海洋平臺各專業、組塊所包含的單元的重量、重心理論值及實際反饋值經由數據采集MAS導入OPMAWCS系統中,并傳遞給重控計算MAS。重控計算MAS計算各個組塊的重量、重心值以及計及裕度的重量、重心值后,交由重控預警MAS進行預警判斷,若超出誤差接受度,則提示預警信息,并給出相應的分析,最終傳遞給重控文件MAS。重控文件MAS按操作人員需求生成相應的重控報告、繪制重控曲線,并經由重控文件管理MAS上傳至企業內部各項目組文件夾中。待重控文件審批后,若審批通過,則重控結束;若審批未通過,還需返還給外部系統進一步進行設計及修改,再重新經由OPMAWCS系統處理,直至滿足要求。
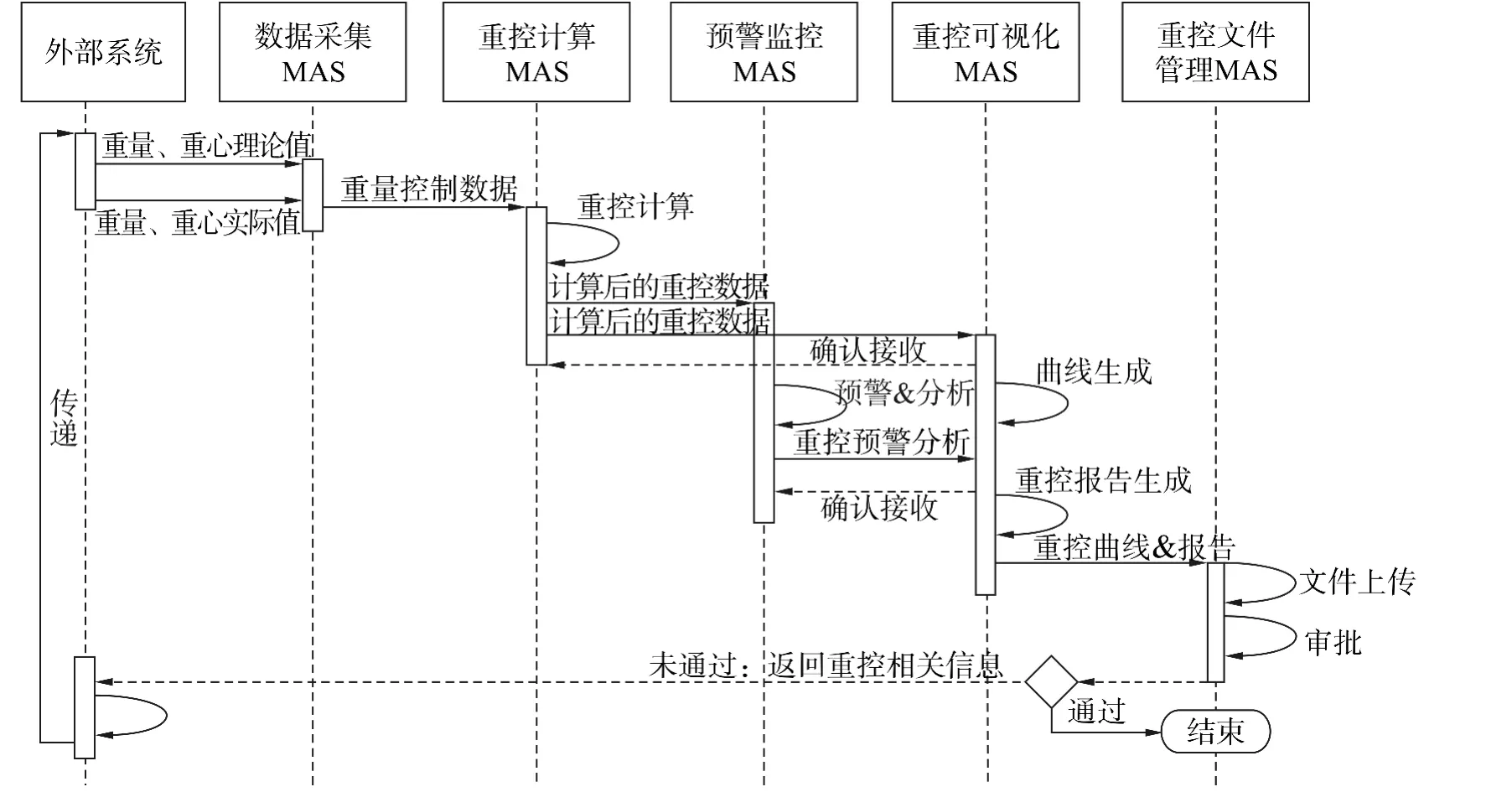
圖6 OPMAWCS系統中各子MAS協作運行模型Fig.6 Cooperation model of sub-MAS in OPMAWCS
5 系統總體架構與實例驗證
5.1 系統軟件總體架構
OPMAWCS采用B/S(Browser瀏覽器/Server服務器)網絡結構,其邏輯架構如圖7所示。
1)人機交互。系統與操作人員間的信息接口。其中,界面層包含操作人員可視的各重量控制模塊界面;功能層則是通過各個功能模塊的交互,實現對海洋平臺項目重量控制過程的模擬。
2)運行內核。運行內核對OPMAWCS中各種重量控制數據流、信息流等進行管理和控制,維護系統的運行。工具層與協同層是系統協同運作的核心所在。工具層則包含參與重控過程的各個Agent,而協同層主要包括重量控制過程中各個子MAS結構。模型層實現對海洋平臺項目重量控制的仿真建模。
3)運行環境。是OPMAWCS所基于的硬件環境及開發框架。
5.2 實例驗證
據前述對OPMAWCS軟件總體架構的描述,依據Java智能體開發框架JADE(Java agent development framework)和J2EE(Java 2 platform enterprise edition)架構的工程項目,設計并完成了OPMAWCS系統的開發,該系統主要功能界面如圖8所示。
實例驗證完了以下任務:1)在JADE環境下建立了重量控制各個子MAS的Container,實現了OPMAWCS系統內部各個Agent之間的信息交互和傳遞;2)X-Steel軟件導出的重量、重心理論數據或現場采集到的實際重控數據可直接導入OPMAWCS系統中;3)實現了重量控制過程中的基本功能,包括:重量、重心值的計算,海洋平臺各個組塊、預制單元重量預警及分析等;4)OPMAWCS系統提供重控曲線的可視化功能;5)重控相關文件可通過系統進行管理,包括文件上傳、文件審批等,從而使得操作人員能夠快速追溯文件信息。
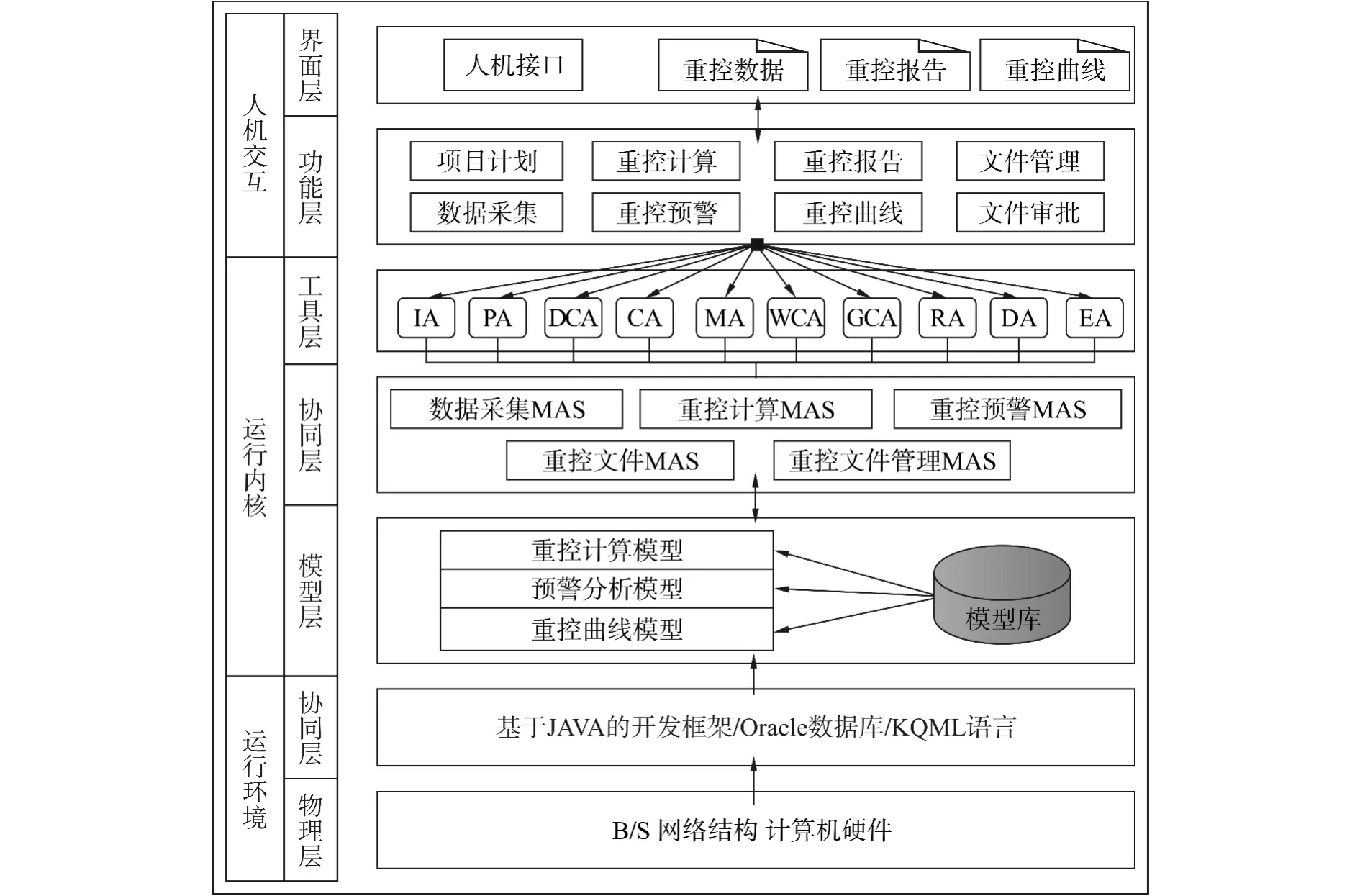
圖7 OPMAWCS系統軟件總體架構圖Fig.7 Software architecture of OPMAWCS

圖8 OPMAWCS系統主要功能界面Fig.8 Main function interfaces of OPMAWCS
6 結束語
利用MAS技術中Agent的自主性、協作性、異構性及交互性等智能特性提出了OPMAWCS系統模型,并在此基礎上開發了海洋平臺項目重量控制多智能體系統,經驗證可完成海洋工程裝備制造企業重量控制流程。該系統的開發不僅滿足重控過程中大量數據的采集與處理的需求,同時實現了重控文件的智能化管理,有利于進一步提高海洋平臺建造過程中的重量控制效率。對于重量控制過程中的重控曲線擬合、誤差分析和解決方案、重量重心精度調整等方面仍有待進一步深入和完善。
[1]楊勤,湯晶,馬鴻鋼.自升式鉆井平臺重量控制研究[J].船舶工程,2012,34(S2):181-183.
YANG Qin,TANG Jing,MA Honggang.Weight control research of jack-up drilling rig[J].Ship Engineering,2012,34(S2):181-183.
[2]謝明智.大型海洋平臺重量重心測試系統的研究與應用[D].上海:上海交通大學,2008:8-27.
XIE Mingzhi.Research and application of weight and barycenter measuring system for large-scale offshore platforms[D].Shanghai:Shanghai Jiao Tong University,2008:8-27.
[3]李章錦,劉檢華,唐承統,等.面向復雜產品離散裝配過程的電子看板系統實現與應用[J].計算機集成制造系統,2014,20(2):313-325.
LI Zhangjin,LIU Jianhua,TANG Chengtong,et al.Realization and application of electronic kanban system for discrete assembly process of complex product[J].Computer Integrated Manufacturing System,2014,20(2):313-325.
[4]劉玉君,胡日強,潘作為,等.海洋結構物空船的質量、質心精度控制技術研究[J].中國造船,2008,49(1): 41-46.
LIU Yujun,HU Riqiang,PAN Zuowei,et al.Study on accuracy control method of weight and gravity centre of offshore structures[J].Shipbuilding of China,2008,49 (1):41-46.
[5]龔閩,趙國良,彭震宇."中油海62"平臺性能特點及重量重心控制[J].船舶工程,2012,34(5):86-88.
GONG Min,ZHAO Guoliang,PENG Zhenyu.Performance characteristics and control of weight and center of gravity for CPOE62 platform[J].Ship Engineering,2012,34(5): 86-88.
[6]SHI Qiqi,CHEN Wei,HU Jinhua.PDMS secondary development for weight control in offshore project[C]//2013 International Conference on Frontiers of Energy,Environment Materials and Civil Engineering.Shanghai,China,2013: 685-692.
[7]WU Hang,SONG Zhengrong,LI Lin,et al.Weight control technique in construction of deepwater floating platform[C]//Proceedings of 2013 International Conference on Frontiers of Energy,Environmental Materials and Civil Engineering(FEEMCE 2013).Shanghai,China,2013:671-677.
[8]劉玉君,胡日強,鄧燕萍,等.基于局域網的空船重量重心統計管理數據庫系統開發[J].造船技術,2007,(5):42-46.
LIU Yujun,HU Riqiang,DENG Yanping,et al.Database system development for the management of weight and centre of gravity of empty ship based on local area network[J].Shipbuilding of China,2007,(5):42-46.
[9]劉玉君,李瑞,汪驥,等.海洋結構物重量控制軟件系統開發研究[C]//CAD/CAM學術交流會議論文集.廈門,2011:16-20.
LIU Yujun,LI Rui,WANG Ji,et al.Research on the system development of weight control of marine structure[C]// CAD/CAM Academic Exchange Conference Proceedings.Xiamen,China,2011:16-20.
[10]PALMIERI F,BUONANNO L,VENTICINQUE S.A distributed scheduling framework based on selfish autonomous agents for federated cloud environments[J].Future Generation Computer Systems,2013,29:1461-1472.
[11]LIU Xinhua,PENG Gaoliang,LIU Xiumei,et al.Development of a collaborative virtual maintenance environment with agent technology[J].Journal of Manufacturing Systems,2010,29(4):173-181.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
