基于EFEM的5R機械臂剛柔耦合動力學分析
2015-03-23 06:57:34車仁煒陸念力薛淵
哈爾濱工程大學學報 2015年11期
車仁煒,陸念力,薛淵
(哈爾濱工業大學機電工程學院,黑龍江哈爾濱150001)
現代科學技術的發展使機械系統不斷向高速、輕質、復雜化方向發展,構件在慣性力急劇增大的同時剛度在不斷降低,從而導致構件的彈性變形及其對機械運動輸出的誤差不斷增加。此外,由于機械系統柔度加大而帶來的系統固有頻率的下降和因機械運轉速度的提高而造成的激振頻率的上升,可能使機械系統產生較強的振動現象。將構件視為剛體的動力學分析方法,由于忽略了構件的彈性變形,已不再適應現代機械設計分析的要求,但是,對大型的復雜的機械系統,系統中構件數目很多,許多構件往往剛性很大,而若把整個系統看做柔性系統做動力學解算時,又會導致運動方程維數很大,不易求解[1-3]。因此,對含有限剛性構件的復雜機械系統進行剛柔耦合動力學分析將對工程實際具有非常重要的應用價值。
1 等效動力學模型
圖1為港口起重機臂架系統機構簡圖,這是一個含有5個轉動副的5R機械臂,其主要包括以下部件:主臂①、搖臂②、拉桿③、變幅驅動機構④和平衡重移動機構⑤等,圖中1~11為節點編號.變幅原理為:變幅電機首先帶動變幅小齒輪轉動,小齒輪再帶動螺母齒輪反向轉動,進而實現絲杠的線性運動,導致主臂作俯仰運動,從而實現起升載荷幅度的改變。
在對其進行動力學分析時,若只視其為多剛體系統,則建模過程簡單,分析方便,但忽略了結構變形對運動的影響;若將其視為多柔體系統,則只考慮到運動對變形運動的影響,沒有充分考慮到運動和變形之間的相互耦合作用。本文將基于等效元素集成法(equivalent finite element integrated method,EFEM),將系統視為含有限剛性構件的剛柔耦合系統,建立港口起重機5R機械臂的剛柔耦合動力學模型,對構件(單元)自身的動力學特性進行等效,組建成等效系統,將建模的關鍵歸結為系統中二階轉換張量和相應的三階轉換張量的求解以及系統質量陣的組裝,按多柔體動力學的方式建立方程。與傳統方法比較,模型建立簡單快捷,規范化、程式化,由于轉換陣的引入,方程維數大大減少,極其適合現代計算技術的發展[4-5]。

圖1 機械臂機構簡圖Fig.1 Movement diagram of 5R manipulator
與結構靜力計算和振動分析相比,機構動力學分析中運用有限元方法并不多見[8-10]。究其原因,很大程度是因為機構分析中的剛性單元與結構分析中的彈性單元有很大區別,系統組建規則無法直接運用。其主要問題在于:1)單元是通過單元結點自由度與其他單元發生聯系,實現運動和力的傳遞,從而組裝成系統。因此,彈性單元的自由度多位于單元結點上,且與結點自由度(獨立坐標)數相同。剛性單元則不然,自由狀態下,剛性單元的獨立自由度(活動度)數是確定的,平面單元活動度為3,空間單元活動度為6,且結點上的可能位移數目也不盡相同。剛性單元的結點自由度不一定與其獨立坐標相同,可能會產生結點自由度(可能位移)不能相互獨立無關的情況。2)剛性單元中彈性剛度陣已不存在,其質量陣也不能采用彈性單元的形式,必須重新構造。3)系統運動自由度與單元自由度的約束與耦合關系更為復雜,使系統方程的組裝難度增大,系統動力學方程的表達趨于復雜[11-12]。
在復雜機構中,無論各構件的質量如何分布,都可以用等效元素集成法將其等效為集中質量分布的等效單元[4-7],為使等效集中質量單元與原質量單元在靜力學和動力學方面等效,應保證等效之后單元的慣性矩陣與原單元的慣性矩陣完全相同。關于等效單元、等效系統的概念以及等效原則和單元動力學方程的推導已在文獻[4-5]中給出。
1.1 從彈性單元到剛性單元
如前所述,任何分布質量的剛性構件,均可按等效原則變為集中質量的等效單元,從而使單元質量陣列寫得極為簡單,例如平面梁桿單元向兩端等效的平面桿單元質量陣可表為
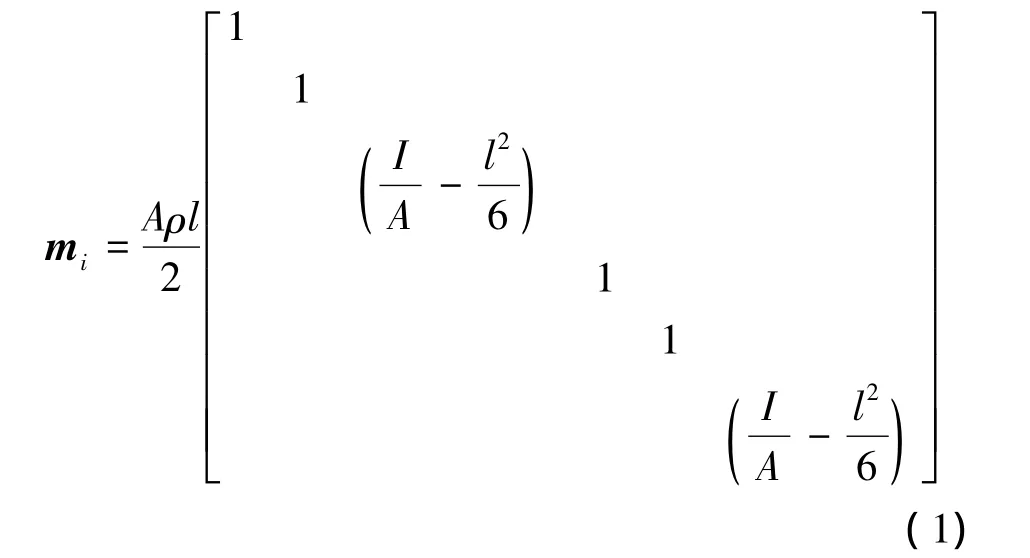
但是必須指出,這只是具有兩結點、6自由度的平面彈性梁桿的質量陣,它并不能應用于剛性系統的動力學建模,它只是借用了彈性單元的表達形式。實質上,在剛性單元中,這些結點自由度并非相互獨立。只有在加入剛性約束條件后,等效單元才具有真正意義上的等效[5]。
當引入系統各單元的剛性約束條件建立過渡坐標時,由過渡坐標ui與廣義坐標qa間的關系,可確定二階轉換矩陣及三階轉換矩陣:

確定廣義坐標后,廣義坐標qa和系統各可能位移ui之間的關系可以很方便地寫出,因此,二階及三階轉換張量的求解過程也很簡單快捷,避免了用傳統方法的繁雜求導以及考慮哥氏加速度等運算。無論對單自由度還是多自由度系統,系統構件數越多越復雜,越能顯示其優越性。
1.2 剛柔耦合系統動力學方程的集成
對于剛柔耦合系統,在建立動力學方程時,難點往往在于運動方程的列寫和組裝;而由于系統運動方程的復雜,方程的個數很多,又給求解帶來極大的不便,因此,簡單和程式化建模以及方便快捷地求解一直是學者們追尋的目標[13-16]。
描述剛柔耦合系統的運動時,運動方程仍可表示為

但方程的組裝卻和多柔體系統不同,因為方程的列寫要考慮剛柔耦合作用。
1.2.1 系統質量陣M的集成
設系統可能位移總數為N,則系統總質量陣為N×N階方陣。
設Hi(i=1,2,...,n)為系統中表示剛性單元各節點坐標和系統可能位移之間關系的關聯矩陣,對柔性單元,Hi=0;設Hj(j=1,2,...,n)為系統中表示柔性單元各節點坐標和系統可能位移之間關系的關聯矩陣,對剛性單元,Hj=0;由于組建質量陣時,在剛柔耦合項,分別引入了Hi=0和Hj=0,所以,用有限元法進行組裝時,與傳統方法比較,階數大大降低,縮減了求解規模,提高了解題效率。
設m1為剛性單元質量陣,m2為柔性單元質量陣,用有限元方法可以組裝成系統質量陣為

1.2.2 系統剛度陣和阻尼陣的組裝
對于剛性單元,單元剛度陣為kr=0,單元阻尼陣為C=0;由C生成耦合陣De。
組裝成系統剛度陣和系統阻尼陣時,矩陣中剛性單元相應位置為0,柔性單元相應位置按有限元方式組裝。
1.2.3 系統運動方程數量的縮減
如前所述,剛性單元的結點自由度不一定與其獨立坐標相同,當引入系統各單元的剛性約束條件建立過渡坐標時,可確定二階及三階轉換矩陣Tia及Tibc,對柔性單元,Tia中相應位置元素為1,將Tia和Tibc代入到系統運動方程中,由于柔性單元在相應位置二階轉換張量元素為1,用有限元方法組建方程時,方程的數量就會大大縮減,所以提高了解題效率。
2 5R機械臂剛柔耦合動力學模型
如圖1所示的5R機械臂,其機構參數為:變幅絲杠長度7.50 m,絲杠質量1 135 kg,絲杠螺距0.054 m,螺母齒輪轉動慣量17 kg·m2,驅動馬達轉動慣量4 kg·m2,變幅機構質量3 200 kg,絲杠轉動慣量 3 405 kg·m2,螺母齒輪半徑0.442 m,驅動小齒輪半徑0.051 m求馬達的動力學響應。
由于圖1所示模型中構件數目較多,將導致多柔體動力學分析總體求解方程規模較大,可取做大范圍運動的相對剛度大變形小的單元為剛性單元,在此對其平衡重移動機構進行等效,以減小求解規模。假設連桿為剛體,在等效時,電機絲杠系統的動力等效為驅動力矩Mn施加于主臂上。
建立了如圖2所示的等效動力學模型,14個系統可能位移ui的選取如圖中編號1~14所示,將系統劃分為5個單元,取⑤為剛性單元,①、②、③、④為柔性單元。

圖2 動力學模型Fig.2 Dynamics model
單元節點號與系統可能位移之間的關聯Nm如下
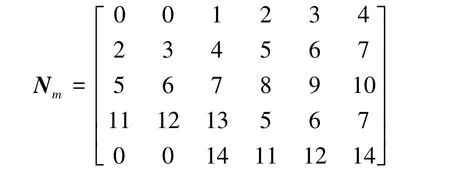
由Nm可分別寫出Hi和Hj,然后按式(5)進行組裝,可得系統質量陣為
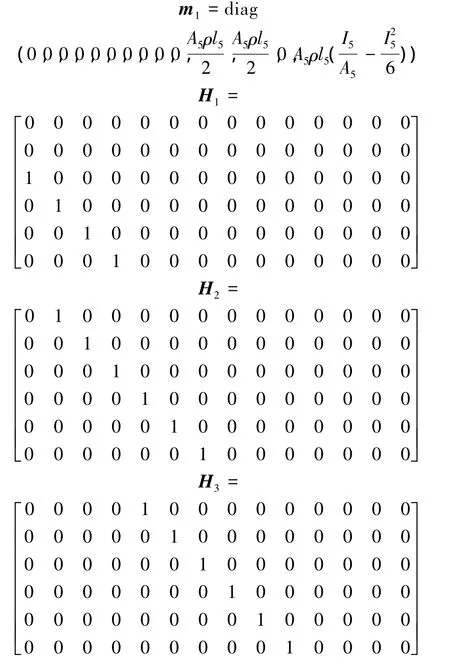

圖3~5分別為馬達驅動力矩、轉速和加速度變化結果。3~5可見,啟動6 s后,驅動力矩趨于平穩,馬達速度變化越來越小,加速度趨于0,而剛柔耦合解較之剛性解更真實地反映了機構運動特性。
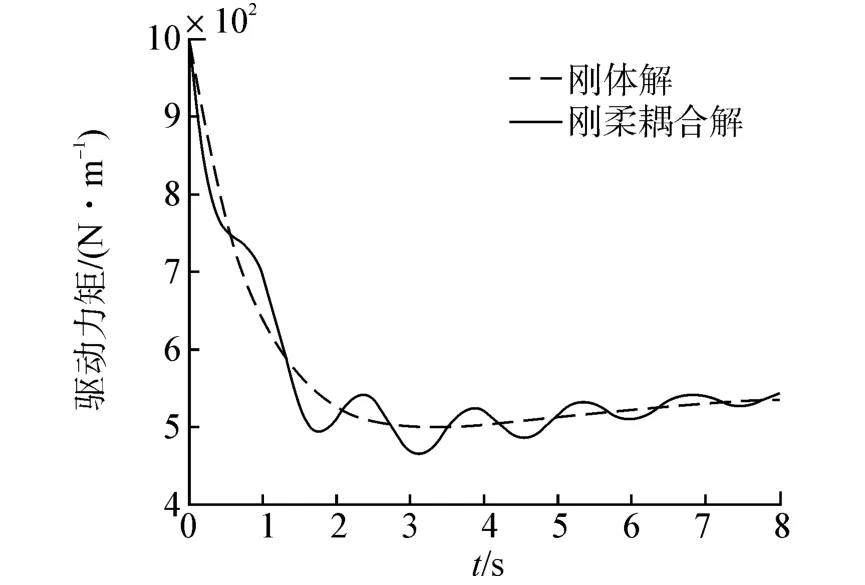
圖3 馬達驅動力矩Fig.3 The motor driving torque curve

圖4 馬達轉速Fig.4 Motor speed curve
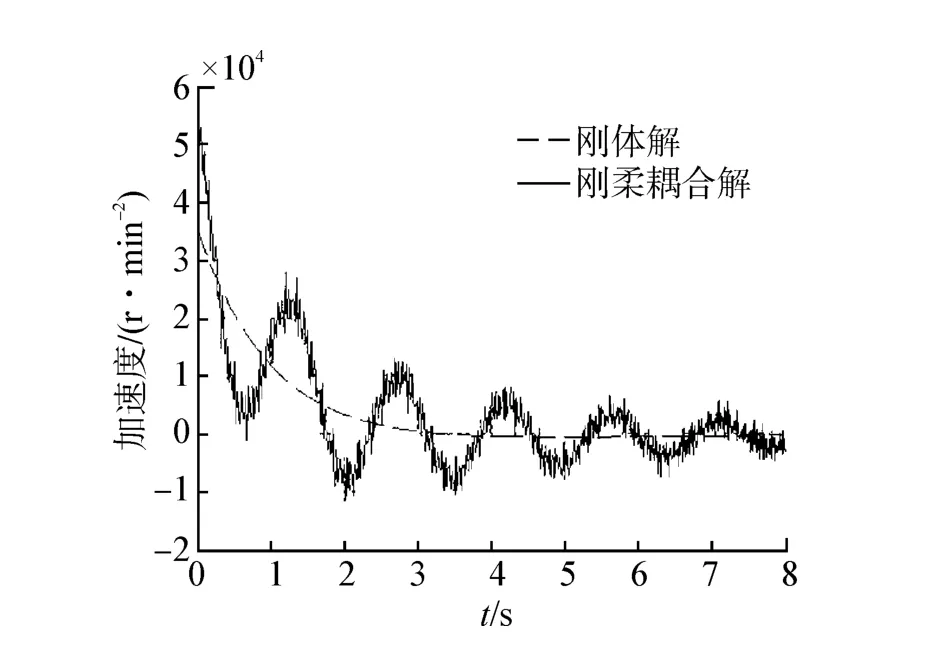
圖5 馬達加速度Fig.5 Motor acceleration curve
3 結論
1)基于等效元素集成法建立了復雜機構剛柔耦合動力學模型,與傳統方法比較,模型建立簡單快捷,規范化、程式化,極其適合現代計算技術的發展,為工程技術人員提供了一種動力學分析的手段。
2)用此方法對復雜機構建模,對剛性單元,由于采用了等效元素集成法,考慮節點約束,方程的維數減少;而對剛柔耦合單元,由于特殊關聯陣的引入,使系統質量陣階數減低,降低了求解規模。
3)對5R機械臂進行了剛柔耦合動力學分析,給出了動力學響應,可為機構的動態優化和控制提供理論依據。
4)此方法也可作為傳統剛柔耦合動力學分析方法的一種補充。
[1]車仁煒,呂廣明,陸念力.五自由度康復機械手的動力學分析[J].哈爾濱工業大學學報,2005,37(6):744-747.
CHE Renwei,LYU Guangming,LU Nianli.Dynamic analysis of a 5-DOF rehabilitative manipulator[J].Journal of Har-bin Institute of Technology,2005,37(6):744-747.
[2]陸念力,蘭朋,金奕山.彈性連桿機構動力分析的一種新方法[J].中國工程機械學報,2003,1(1):6-10.
LU Nianli,LAN Peng,JIN Yishan.A new method to the dynamic analysis of flexible linkage mechanism[J].Chinese Journal of Construction Machinery,2003,1(1):6-10.
[3]G?TTLICHER B,SCHWEIZERHOF K.Analysis of flexible structures with occasionally rigid parts under transient loading[J].Computers&Structures,2005,83(25/26):2035-2051.
[4]CHE Renwei,LU Nianli.An equivalent finite element method to kinetics analysis of complex mechanism[J].Journal of Harbin Institute of Technology,2005,12(2):197-200.
[5]車仁煒.機構動力學建模的等效元素集成法研究及其應用[D].哈爾濱:哈爾濱工業大學,2007:48-66.
CHE Renwei.Research of equivalent finite element integrated method to establish dynamics model of mechanism and it's application[D].Harbin:Harbin Institute of Technology,2007:48-66.
[6]周成,邵躍林.基于ADAMS與ABAQUS的剛柔耦合動力學分析方法[J].機械制造與自動化,2014,43(1): 131-133.
ZHOU Cheng,SHAO Yuelin.Dynamic analysis method of flexible multi-body system based on ADAMS and ABAQUS[J].Machine Building&Automation,2014,43(1):131-133.
[7]HUANG Yongan,DENG Zichen,YAO Linxiao.An improved symplectic precise integration method for analysis of the rotating rigid-flexible coupled system[J].Journal of Sound and Vibration,2007,299(1/2):229-246.
[8]陳思佳,章定國,洪嘉振.大變形旋轉柔性梁的一種高次剛柔耦合動力學模型[J].力學學報,2013,45(2):251-256.
CHEN Sijia,ZHANG Dingguo,HONG Jiazhen.A high-order rigid-flexible coupling model of a rotating flexible beam under large deformation[J].Chinese Journal of Theoretical and Applied Mechanics,2013,45(2):251-256.
[9]夏擁軍.計及二階效應的柔性桿系動態分析及在起重機械中的應用[D].哈爾濱:哈爾濱工業大學,2007:51-58.
XIA Yongjun.Dynamic analysis with second-order EFFEC for flexible beam systems and its application in crane[D].Harbin:Harbin Institute of Technology,2007:51-58.
[10]JORGE A C.Complex flexible multibody systems with application to vehicle dynamics[J].Multibody System Dynamics,2001,6(2):163-182.
[11]CHEN J S,HUANG C L.Dynamic analysis of flexible slider-crank mechanisms with non-linear finite element method[J].Journal of Sound and Vibration,2001,246(3): 389-402.
[12]MINGHINI F,TULLINI N,LAUDIERO F.Vibration analysis with second-order effects of pultruded FRP frames using locking-free elements[J].Thin-Walled Structures,2009,47:136-150.
[13]王磊,趙新華.RRRT并聯機器人的動力學研究[J].天津理工大學學報,2006(4):20-23.
WANG Lei,ZHAO xinhua.Study on the dynamics of 3-RRRT parallel manipulator[J].Journal of Tianjin University of Technology,2006(4):20-23.
[14]劉平安,方躍法,伍素珍,等.三自由度微動并聯機器人的簡化建模方法[J].中國機械工程,2006,17(24): 2251-2254.
LIU Ping'an,FANG Yuefa,WU Suzhen,et al.A simplemodeling method for 3 DOF micro-motion parallel manipulator[J].China Mechanical Engineering,2006,17 (24):2251-2254.
[15]高洪,趙韓.6-3-3并聯機構逆動力學分析與仿真[J].農業機械學報,2007,9:130-133.
GAO Hong,ZHAO Han.Inverse dynamic analysis and simulation of 6-3-3 parallel mechanism with six-degree-of-freedom[J].Transactions of the Chinese Society for Agricultural Machinery,2007,9:130-133.
[16]QUARANTA G,MANTEGAZZA G,MASARATI P.Assessing the local stability of periodic motions for large multibody non-linear systems using proper orthogonal decomposition[J].Journal of Sound and Vibration,2004,271:1015-1038.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國生殖健康(2019年2期)2019-08-23 08:12:08
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12