自適應GM?PHD濾波器在多目標追蹤的應用
2015-06-12 03:40:22蒼巖陳迪畢曉君
哈爾濱工程大學學報 2015年11期
關鍵詞:哨音
蒼巖,陳迪,畢曉君
(哈爾濱工程大學信息與通信工程學院,黑龍江哈爾濱150001)
自適應GM?PHD濾波器在多目標追蹤的應用
蒼巖,陳迪,畢曉君
(哈爾濱工程大學信息與通信工程學院,黑龍江哈爾濱150001)
針對PHD濾波器中先驗概率初始化時,新生目標出現的位置不確定,且目標強度計算區域必須為整個監測區域,造成算法低效率等問題,將原始算法通過PHD濾波的擴展項在預測步驟與更新步驟對新生目標與存活目標進行區分,再通過每一次掃描得到的量測自適應更新得到目標新生強度,依據量測的驅動來避免對先驗概率初始化假設的問題。利用OSPA函數作為算法性能監測標準,利用仿真數據和實測數據對改進的算法進行了驗證。結果顯示,利用量測來驅動新生目標強度函數,對新生目標與存活目標先進性判斷,目標數目估計正確率達到97%,OSPA距離較GM?PHD算法下降50%。
概率密度函數;高斯濾波器;多目標;跟蹤算法;自適應估計
多目標跟蹤技術已經發展了50多年,相繼在防衛系統、監視系統等領域得到了廣泛應用。該技術可分為傳統多目標跟蹤方法和新興的多目標跟蹤方法。新興算法是一種基于隨機有限集的概率假設密度濾波方法,其主要代表為粒子概率假設密度濾波[1]和高斯混合概率假設密度濾波[2]。通過將新生目標的概率密度函數設為均勻分布,可以提高近似高斯新生模型下的濾波性能,同時避免對高斯新生組件數目和位置參數的設置[3];在利用量測驅動生成新生概率密度方面也有很多學者做了嘗試,并將其應用到序貫蒙特卡洛概率假設密度濾波器中,減少新生目標的粒子數目,且能較準確地估計目標狀態[5];除了量測信息遺愛,利用似然信息來生成新生目標強度函數,能得到更好的跟蹤效果[5]。本文基于上述文獻的研究,將自適應新生目標概率密度函數應用到高斯混合框架下,從而提高目標跟蹤精度和濾波器性能,并將原始算法和改進算法應用到海豚哨音信號追蹤。
1 GM?PHD的改進
1.1 算法介紹
本算法引入基于量測的新生強度函數,該思想在文獻[6?7]中被用于PHD粒子濾波實現的框架下。因高斯混合概率假設密度濾波無需聚類、粒子采樣等步驟,在計算和狀態估計方面比粒子濾波更具優勢,然而在標準的高斯混合概率假設密度濾波器中,新生目標的強度函數被視為先驗概率,該假設限制了實際工程中的應用,因此本文將該思想應用于高斯混合概率假設密度框架下進行實現,稱為自適應高斯混合概率假設密度濾波器。該方法可通過每次掃描得到的量測值自適應地生成新生目標強度函數。
在PHD中,若將衍生目標忽略,預測方程可表達為

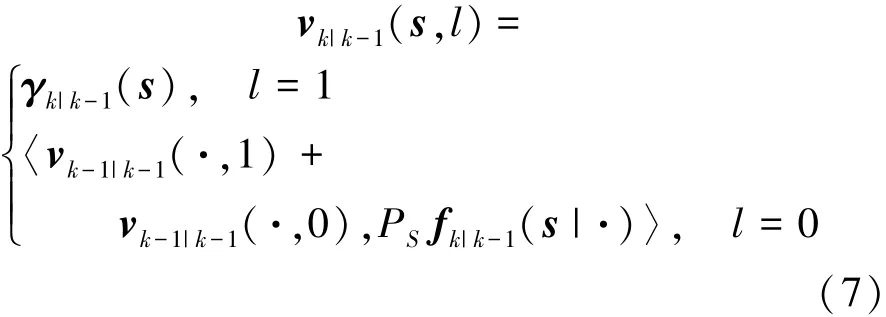
式中:〈g,f〉=∫f(x)g(x)dx。狀態向量x包含了兩個部分,一部分是動力學的特征成分,如位置、速度,用s表示;另一部分是一個邏輯值,用l表示,用來區分新生目標和存活目標。l=0代表存活目標,l=1代表新生目標,于是狀態向量x可表示為x=(s,l)。這樣新生目標強度函數可表示為

新生目標可以在下一時刻變為存活目標,但一個存活目標不能轉變為新生目標,所以邏輯標記l僅能由1變為0,反之不成立。
轉移密度函數為
其中
存活概率獨立于l,因此

檢測概率寫為

則GM?PHD濾波預測方程式可被寫為
將式(2)、(3)分別代入預測和更新方程,則預測方程可被重新寫為
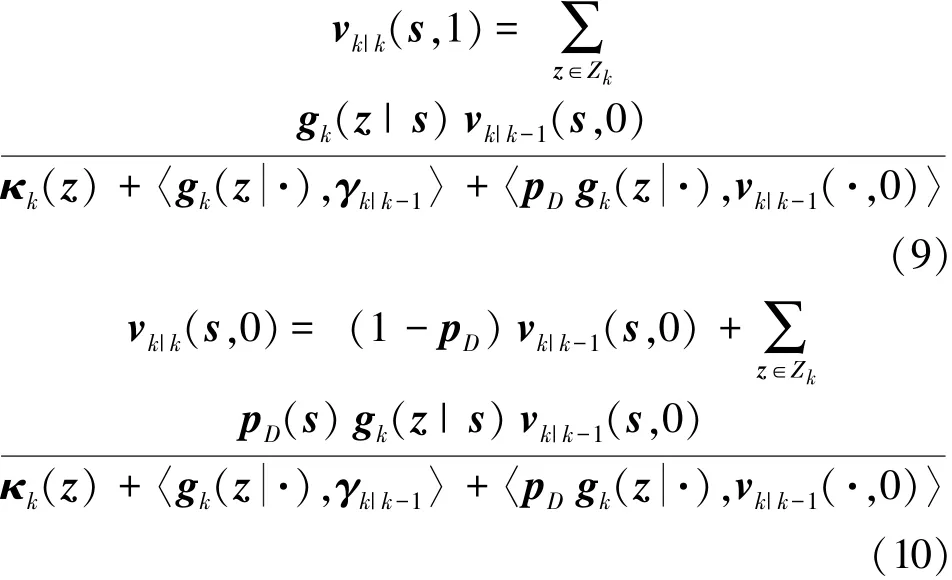
量測也不依賴于l,所以似然函數可表達為

因此新的更新方程,對于新生目標與存活目標的顯示表達分別為
1.2 算法步驟
改進算法將2種類型目標的預測和更新步驟分別計算,具體步驟如下:
步驟1:初始化
假設當k=0時,新生目標和存活目標的初始強度函數分別為v0|0(s,0)=0和v0|0(s,1)=0。在k-1時刻,二者的強度函數分別表示為vk-1|k-1(s,0)和vk-1|k-1(s,1),并用高斯組件集
分別近似表示。所以k-1刻新生目標和存活目標強度函數的高斯形式可表示為
步驟2:聯合

該集合代表了表達式vk-1|k-1(s,0)+vk-1|k-1(s,1)。
步驟3:預測
2種目標分別預測。
1)存活目標預測。
AGM?PHD濾波器擁有和GM?PHD濾波器相同的預測方程表達式:

值得注意的是,在k-1時刻,用來預測的高斯組件是步驟2中合并后的并集集合,這點不同于傳統的GM?PHD濾波器。
存活目標的預測強度函數vk|k-1(s,0)可用高斯形式表示:
2)新生目標預測。
中金公司的數據表明:以中美之間貿易量占全球的比例來看,中美之間集裝箱貿易占全球4.7%,糧食貿易占全球7.8%,是占比最高的兩個子類。從雙方的依賴度而言,中國從美國進口占比高的主要為糧食(包括大豆),占中國糧食進口量的34.4%;美國從中國進口占比高的主要為集裝箱,占美國集裝箱進口量的37.4%。
對新生目標的數據處理不同于原始的方式,令量測方程為z=h()+q,其中h是個可逆函數,代表被檢測到的目標狀態矢量,q是量測噪聲,且協方差為R。新生目標的信息可以通過當前量測集合得到,均值表示為=h-1(zk,j),其中h-1函數式h的逆。協方差表示為=HRHT,權值可用等式方程/Nnk計算得到,其中是k時刻對應的量測數目是預先設定的新生目標的數目。
步驟4:更新
1)存活目標更新。
更新方程表示為
式中:ηk|k-1,e、Sk|k-1,e、Kk是更新高斯組件,與GM?PHD濾波器中的更新高斯組件相同。
2)新生目標更新。
該算法的剩余部分與GM?PHD相同,此處不再重復講述。
2 算法驗證
2.1 仿真實驗結果
本文給出了AGM?PHD算法和GM?PHD算法的對比仿真結果。在這個實驗里,一共有4個目標,其中3個一直存在,另1個在第55 s生成。該仿真共運行100 s。每個目標k時刻的狀態向量表示為。雜波隨機有限集的強度函數為,其中u(·)在整個監視區域[-1 000,1 000]服從均勻分布。線性高斯模型為
式中:T=1 s是采樣周期,σv=2是過程噪聲的標準方差,In、0n代表了n×n單位矩陣和零矩陣。存活概率和檢測概率為Ps=0.99和PD=0.99,其他參數Tr=10-5,U=4,wTh=0.5,Jmax=100分別為剪枝閾值、合并閾值、權值閾值、高斯組件最大數。
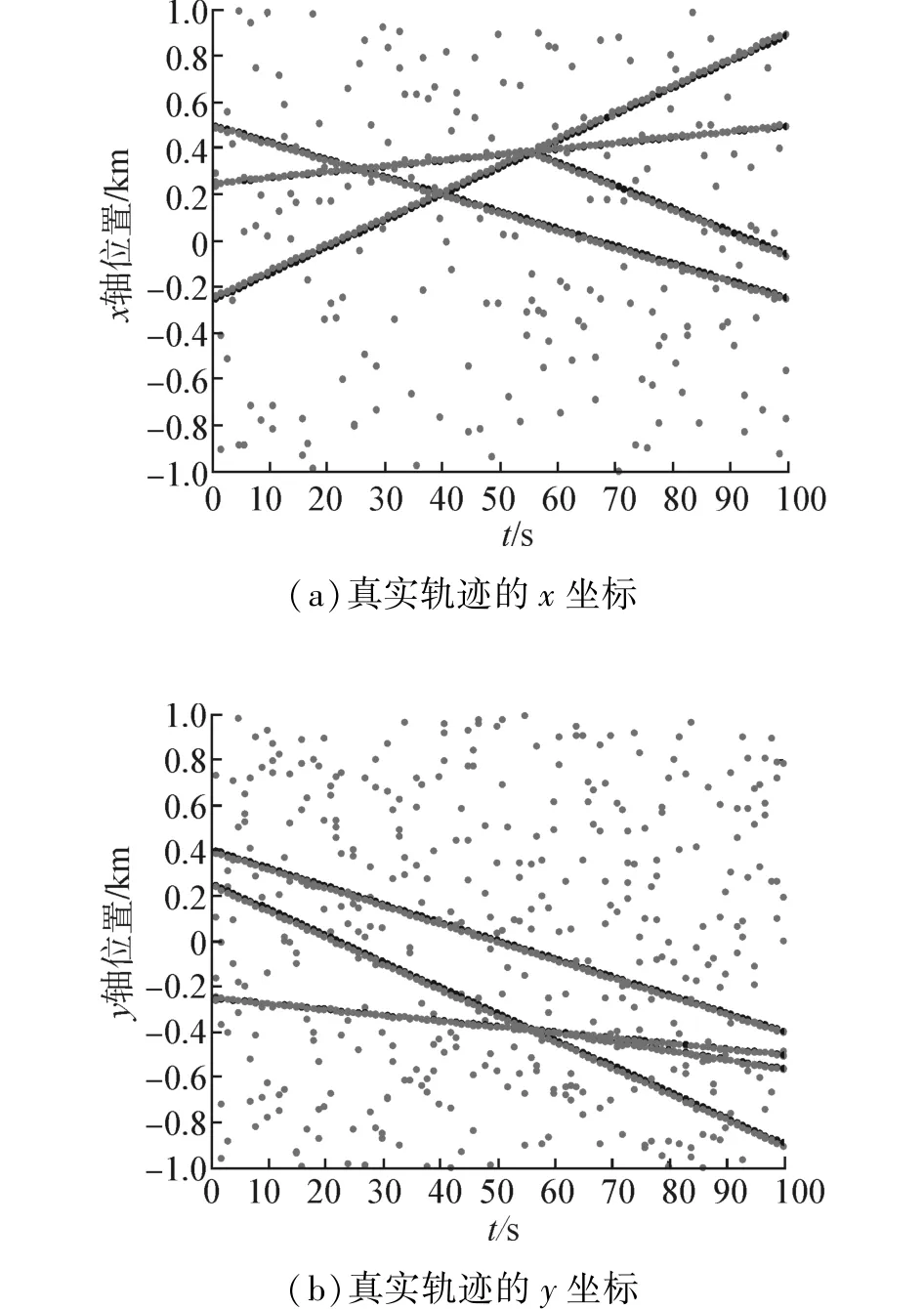
圖1 目標的真實軌跡Fig.1 The true targets trajectories
圖1 表示具有目標的真實軌跡和具有雜波的量測,有3個目標一直存在,剩下的一個目標在55 s時生成;圖2表示了GM?PHD和AGM?PHD的追蹤性能,從估計的位置可以看出,AGM?PHD相對GM?PHD產生了較少的異常估計,具有更準確的跟蹤性能。圖3是由2種算法對真實目標追蹤產生的估計目標數目,圖4是2種算法的一個性能指標OS?PA[9],OSPA是在點過程理論中被提出,其基于目標數目和位置的估計誤差算出相應值,是用來衡量集合間差異程度的誤差距離,其表達式如下
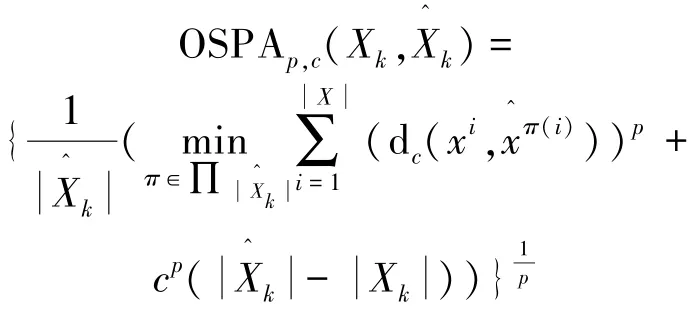
式中:參數p表示階數,其值決定對異常值的敏感性;c代表截取距離,其決定了對于勢誤差的處罰程度,在該仿真實驗中,分別設為1和100。該性能指標表明了算法在追蹤目標準確性的好壞,可以看出,AGM?PHD的表現優于GM?PHD,且更穩定。

圖2 GM?PHD和AGM?PHD估計性能對比Fig.2 The comparison of GM?PHD and AGM?PHD stimation
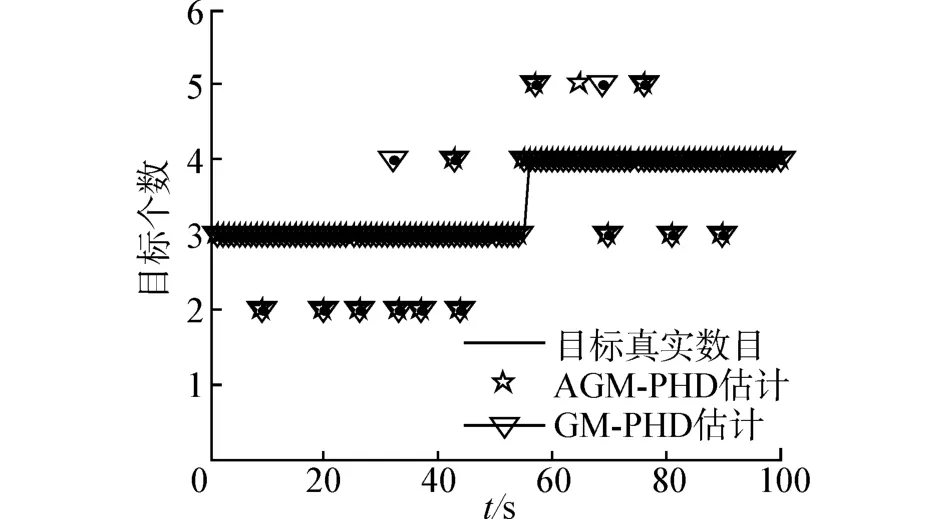
圖3 估計數目對比Fig.3 Comparison of number of targets
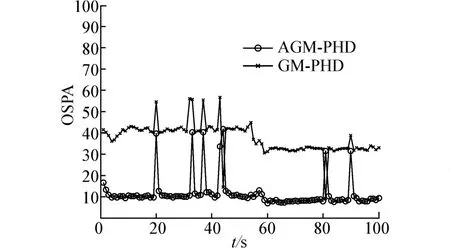
圖4 OSPA距離的對比Fig.4 Comparison of OSPA distance
2.2 海豚哨聲信號追蹤驗證
2.2.1 海豚哨聲信號的動態模型
海豚可以產生一系列哨音信號來表達特殊的信息,將不同的哨音信號視為不同的目標,所以對于哨音信號的追蹤問題可當作多目標追蹤的問題來處理。在哨音信號追蹤時,其狀態向量由頻率f和調頻斜率α[10]構成:xk=[f,α]T。此時在多目標追蹤中的線性高斯模型表示為其中vk是零均值高斯噪聲,T是采樣頻率,對應的采樣頻率為fs=1/T。在量測模型中,只有頻率信息有用,量測方程表示為zk=Hxk+wk,其中量測矩陣H為H=10[],wk是零均值高斯噪聲,其協方差為Pw。狀態轉移密度fk|k-1(x|x')服從N(xk;mfk|k-1,Pfk|k-1)分布,其中mfk|k-1=01×2,Pfk|k-1=為量測噪聲的頻率標準方差,是調頻斜率噪聲的標準方差。似然函數gk|k-1(z|x)服從N(x;mg,Pg),其中mg=0,Pg=Pw。
2.2.2 濾波器初始化
哨音信號頻率的初始數目是一個隨機值,高斯組件的均值在2~30 kHz范圍內均勻分布,因為大部分哨音基頻的范圍是2~30 kHz。每個高斯組件的協方差矩陣是

式中:σf和σ?一般設為10和100。合并閾值U=4,剪枝閾值Tr=1×10-5,采樣周期T=1 s,權值閾值wTh=0.5和最大允許高斯組件數Jmax=100。
2.2.3 數據實驗結果
在該實驗中,將GM?PHD和AGM?PHD濾波器用于短喙真海豚和條紋原海豚的哨音追蹤中,雜波強度函數Kk是常數。γ均勻分布在0~25 kHz范圍內,因此掃描雜波平均數目值γ設為5。調協頻率概率分布,頻率初始頻率概率分布,存活概率Ps=0.99,檢測概率PD=0.95,新生目標強度函數設定為κ=5/25 000。
圖5是分別利用AGM?PHD和GM?PHD算法對短喙真海豚哨音信號進行追蹤。圖6是分別利用AGM?PHD和GM?PHD算法對條紋原海豚哨音信號進行追蹤,實驗數據被延長到了500次掃描。從圖中可以看出AGM?PHD濾波算法不僅可以有效地抑制雜波,還可以得到較完整的目標軌跡,而GM?PHD的抑制雜波的能力仍不如前者,且對于目標軌跡的追蹤出現漏追現象,得到的目標軌跡較稀疏。AGM?PHD在抑制大量雜波的同時,亦得到了清晰的跟蹤軌跡。
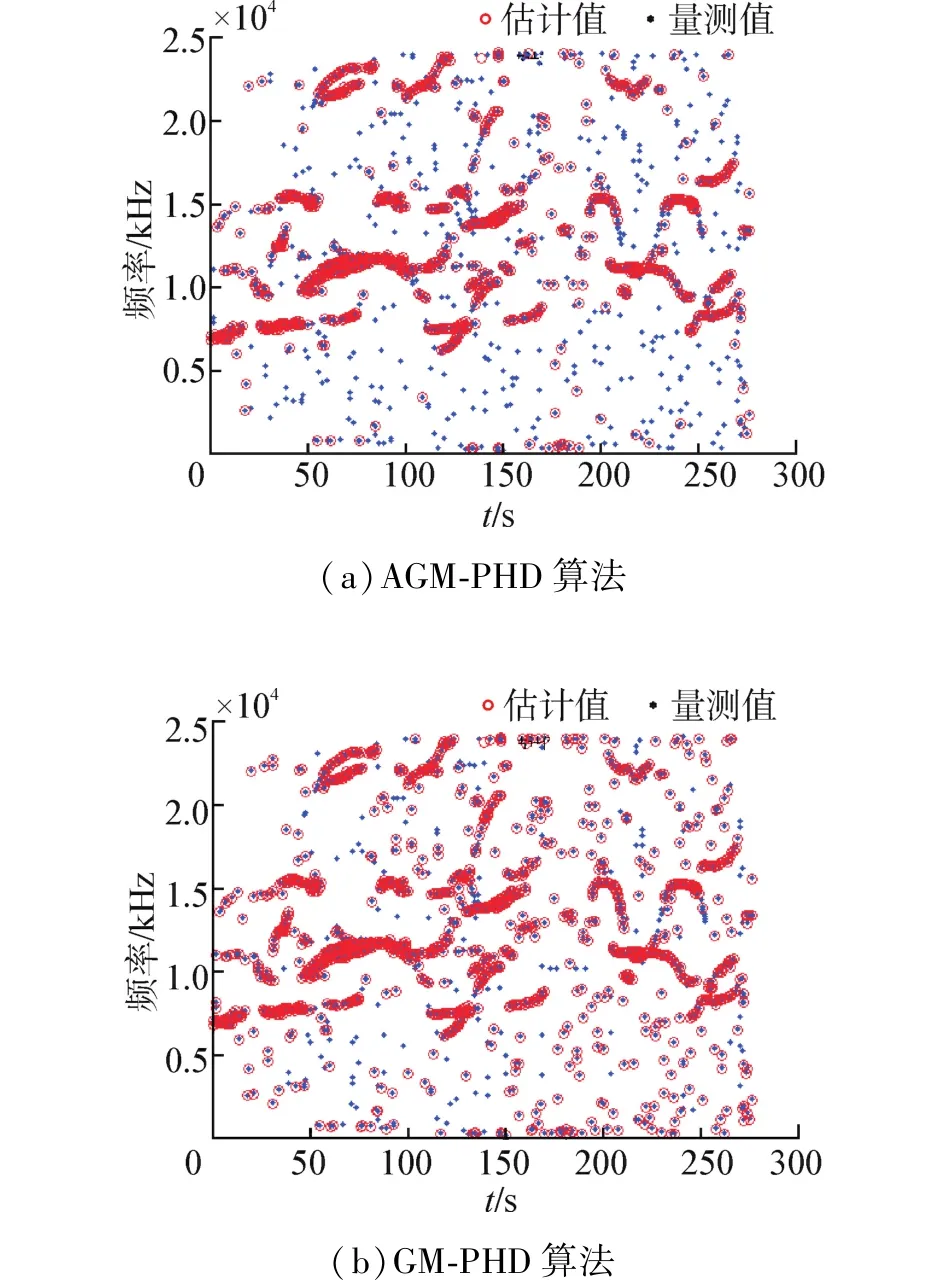
圖5 對短喙真海豚哨音信號追蹤Fig.5 Estimated whistle tracks for delphinus dolphins
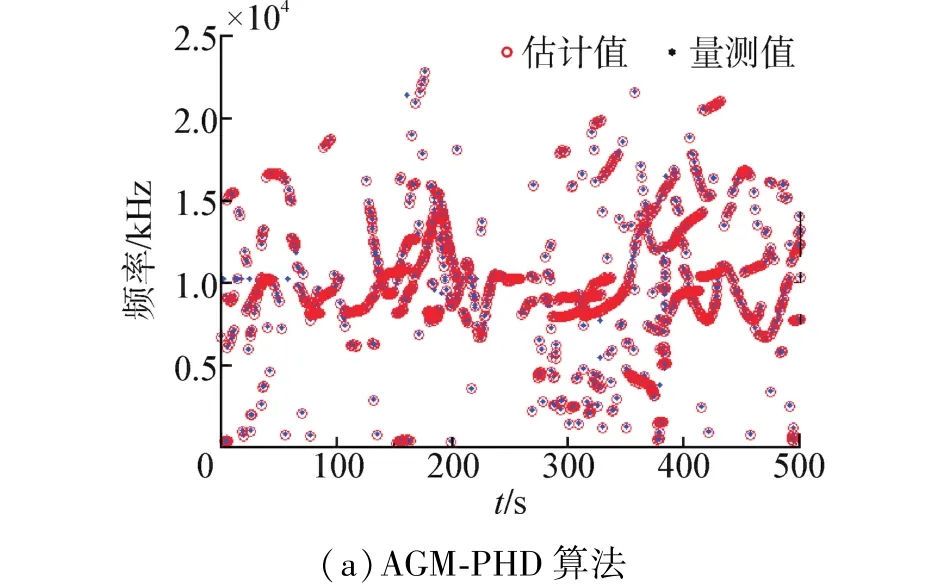
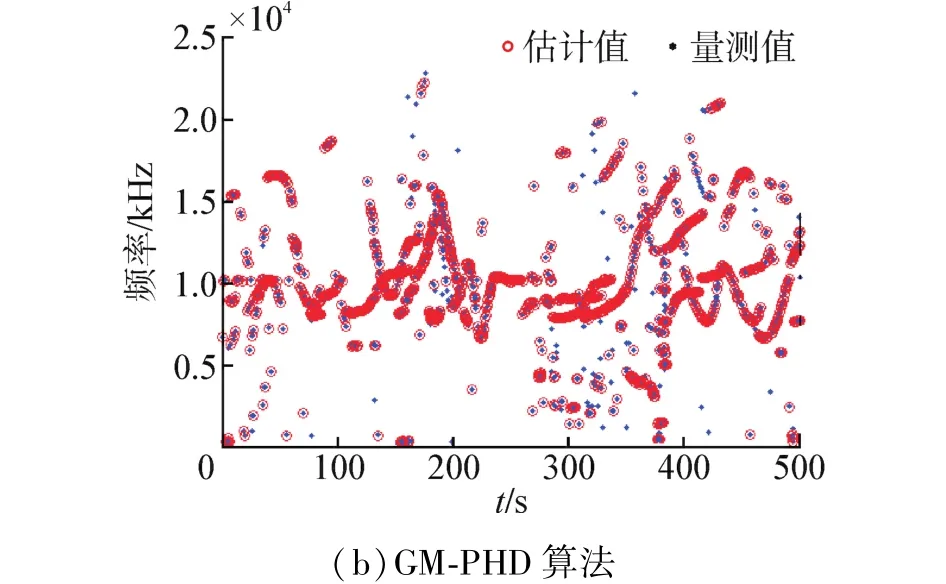
圖6 對條紋原海豚哨音信號追蹤Fig.6 Estimated whistle tracks for stenella coeruleolba
3 結論
因傳統的PHD濾波器將新生目標強度函數設為已知,造成程序運算效率低,且不適用于實際應用,本文提出了自適應高斯混合概率假設密度(AGM?PHD)濾波算法來解決該問題,文中介紹了該算法的實現步驟,最后通過仿真,將改進算法與原始算法進行對比來驗證其跟蹤性能。得到如下結論:
1)該算法可以利用量測來驅動新生目標強度函數,因此相對原始高斯混合概率假設密度濾波算法能夠更為準確地估計目標數目,其估計誤差減小,此外,改進算法對新生目標與存活目標先進行判斷,再進行相應步驟的預測與更新,從而減少程序的運行時間也計算復雜度。
2)本文對2種海豚的哨音進行追蹤,兩組實驗利用了相同的方法與參數,盡管哨音信號的波形不同,雜波數不同,但得到的實驗結果類似。對比結果可知,AGM?PHD濾波算法相對于原始算法在抑制雜波方面與對哨音信號的跟蹤效果方面均優于GM?PHD濾波算法,該實驗結果證明了AGM?PHD濾波算法跟蹤性能的有效性。綜上,即使當有大量的噪聲存在以及信號分量之間存在著彼此交叉時,AGM?PHD算法在追蹤精度和準確性方面仍然優于GM?PHD算法。
[1]戴丁樟.粒子濾波算法研究及其在目標跟蹤中的應用[D].哈爾濱:哈爾濱工業大學,2006:1?67.DAI Dingzhang.Research of particle filter and its application in target tracking[D].Harbin:Harbin Institute of Technolo?gy,2006:1?67.
[2]VO B N,MA W K.The Gaussian mixture probability hy?pothesis density filter[J].IEEE Transactions on Signal Pro?cessing,2006,54(11):4091?4104.
[3]BEARD M,VO B T,VO B N,et al.A partially uniform target birth model for gaussian mixture PHD/CPHD filtering[J].IEEE Transactions on Aerospace and Electronic Sys?tems,2013,49(4):2835?2844.
[4]RISTIC B,CLARK D,VO B N.Improved SMC implementa?tion of the PHD filter[C]//Proceedings of the 13th Interna?tional Conference on Information Fusion.Edinburgh:IEEE,2010:1?8.
[5]RISTIC B,CLARK D,VO B N,et al.Adaptive target birth intensity for PHD and CPHD filters[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(2):1656?1668.
[6]ERDINC O,WILLETT P,BAR?SHALOM Y.Probability hypothesis density filter for multitarget multisensor tracking[C]//Proceedings of the 8th International Conference on Information Fusion.Philadelphia:IEEE,2005:1.
[7]朱孟凱.基于隨機集理論的多目標跟蹤算法研究[D].長春:吉林大學,2013:1?66. ZHU Mengkai.Research of multi?targets tracking algorithm based on random set theory[D].Changchun:Jilin Universi?ty,2013:1?66.
[8]TOBIAS M,LANTERMAN A D.Techniques for birth?parti?cle placement in the probability hypothesis density particle filter applied to passive radar[J].IET Radar,Sonar&Navi?gation,2008,2(5):351?365.
[9]HOFFMAN J,MAHLER R P S.Multitarget miss distance via optimal assignment[J].IEEE Transactions on Systems,Man and Cybernetics,Part A:Systems and Humans,2004,34(3):327?336.
[10]AHMED I.Multiple track estimation using Gaussian mix?ture probability hypothesis density filter[J].IOSA Journals of VLSI and Signal Processing,2013,2(4):37?42.
Application of adaptive GM?PHD filters to multi?target tracking
CANG Yan,CHEN Di,BI Xiaojun
(College of Information and Communication Engineering,Harbin Engineering University,Harbin 150001,China)
The problem is that when initializing prior probability in a probability hypothesis density(PHD)filter,the position of newborn targets is indefinite,and the targeting computations must search the whole monitoring do?main,noticably decreasing efficiency.This paper expands on the original PHD filter,to adaptively distinguish new?born targets from surviving targets in the prediction and updating steps.It then measures again,updating newborn target strength after each scan,thus avoiding the problem of prior probability parameter initialization.The optimal sub pattern assignment(OSPA)function was used to benchmark the performance of the algorithm,plus both simu?lated and tested data were used for validation.Using such measurements greatly enhances discrimination between newborn targets and surviving targets.The results show that estimation accuracy for the number of targets has in?creased to 97%,while the OSPA distance has decreased 50%than the original GM?PHD algorithm.
probability density function;Gaussian filter;multiple targets;tracking algorithm;adaptive estimation
10.11990/jheu.201409014
TN911.7
:A
:1006?7043(2015)11?1526?06
http://www.cnki.net/kcms/detail/23.1390.u.20151109.1526.002.html
2014?09?04.網絡出版日期:2015?11?09.
國家自然科學基金資助項目(61175126,61371175);中央高校基本科研業務費專項資金資助項目(HEUCFZ1209);教育部博士點基金資助項目(20112304110009).
蒼巖(1978?),女,講師,博士;畢曉君(1964?),女,教授,博士生導師.
蒼巖,E?mail:cangyan@hrbeu.edu.cn.
猜你喜歡
教育周報·教研版(2024年20期)2024-12-31 00:00:00
黨員生活(2023年7期)2023-07-26 21:05:23
閱讀(中年級)(2021年4期)2021-06-15 14:27:00
文萃報·周二版(2020年21期)2020-06-22 01:03:04
科學與財富(2017年24期)2017-09-06 12:20:17
閱讀與作文(初中版)(2017年1期)2017-02-06 03:59:57
南北橋(2015年7期)2015-05-30 16:18:24
北極光(2014年7期)2015-02-09 15:20:33
汽車零部件(2014年5期)2014-11-11 12:24:30
閱讀與作文(初中版)(2015年2期)2010-11-18 16:22:51