復雜地面背景下相對定位目標選擇與識別算法
2015-03-23 06:07:32陳世偉楊小岡張勝修王雪梅
激光與紅外 2015年11期
陳世偉,楊小岡,張勝修,王雪梅
(第二炮兵工程大學303教研室,陜西西安710025)
1 引言
目標自動識別是成像末制導過程中的一個關鍵環節,也是當前的一個技術難點,尤其是對于地面復雜背景下的目標識別,存在目標形態各異、背景復雜,特征描述困難,模板圖像不宜制作等諸多困難[1]。宋丹等[2]提出了一種基于仿射梯度方向直方圖特征的目標識別算法,具備很好的旋轉不變性和錯切不變性,但是對目標信息保障要求過高。楊校余、張天序等[3]以及劉婧等[4]均以目標的三維模型為基礎來制作匹配模板圖像。這些方法通常只適用于背景較為簡單、高大、顯著目標,而背景復雜、遠距離、低矮、存在遮擋等情況下的目標則很難或者不能直接識別。針對這一問題,李志軍等[5]提出了一種相對定位方法。其思想是在制定末制導策略時,選擇對直接目標附近的高大、顯著、容易識別的“相對定位目標”進行識別,進而利用它與直接目標之間在實時圖中的相對位置關系對直接目標進行相對定位。但是,該方法的運用也存在一些問題:相對定位目標的選取數量和質量人工很難把握;對于選取的目標進行識別依然存在諸多困難。
針對上述問題,本文提出一種新的基于最穩定極值區域的相對定位目標選取與識別方法。具體流程如圖1所示,首先根據目標區域航拍偵察得到的基準圖像進行MSER特征區域提取,再通過一定策略自適應選取相對顯著的特征區域作為相對定位目標,再利用仿射橢圓對MSER特征區域進行擬合,制成基準數據模板。當飛行器按照預定航跡進入末制導目標自動識別階段時,對實時圖采用同樣的方法進行MSER區域提取擬合,并與基準數據模板進行規則化處理,然后根據互相關性準則提取確定基準數據模版和實時圖像間匹配的MSER特征區域對,最后根據雙層匹配矯正策略剔除誤匹配,從而實現相對定位目標的檢測識別。
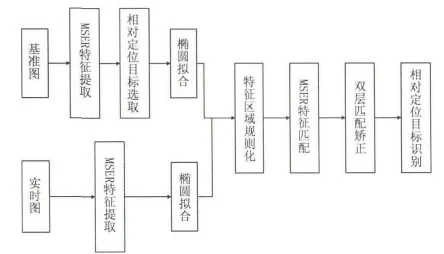
圖1 相對定位目標選取與識別算法流程圖Fig.1 Flow diagram of image selection and recognition
2 相對定位目標自適應選取算法
2.1 特征區域的提取與擬合
2004年,J.Matas等人在研究寬基線圖像匹配問題時借鑒分水嶺思想提出了最穩定極值區域算法[6]。該方法具有良好的穩定性、抗噪性和仿射不變性,計算簡單高效。2005年,K.Mikolajczyk等人對六種主要的仿射無關局部特征點檢測子進行了比較[7],其中一個很重要的比較結果就是使用MSER方法檢測出的局部在視角變換、尺度變換、光照變換、圖像壓縮和圖像模糊這五種情況下在重現性和區分性方面處于領先的位置。
下面給出MSER區域特征提取的具體步驟:
(1)預處理。對輸入的灰度影像采用Bin-Sort算法,按灰度值對所有像元進行降序或升序排序;
(2)極值區域合并與選取。基于上步排序后的影像使用合并-查找(Union-Find)算法構造部件樹,并詳細記錄像素是否放入操作域地圖(Operating Region Map,ORM)中,在ORM中的位置以及合并-查找索引。在形成的部件樹上,從某個節點開始向上搜索分支,同時利用閾值對灰度影像進行二值化聚類操作,不斷查找與合并極值區域,并根據適當的判決條件進行極值區域的選取;
(3)MSER區域檢測。通過上步可以獲得該圖像所對應的全部極值區域序列,針對每一個極值區域序列,計算區域變化率q(i)=|Qi+△-Qi-△|/|Qi|。當且僅當 q(i)在 i*處取得局部極小值時,極值區域Qi才被作為最大值穩定區域提取出來。此時,僅提取出了最小灰度MSER+,為提取最大灰度的MSER-,需要將原始圖像灰度值進行反轉:I反=Imax-I,重復步驟(2)、(3),提取出MSER-。
最穩定極值區域作為一種不規則的仿射不變區域,這不利于特征描述操作。通常需要對這些不規則的特征區域進行擬合,如橢圓擬合、多邊形擬合、凸包圍擬合等。由于特征區域協方差矩陣的特征值和特征向量唯一確定一個橢圓,因此這里采用橢圓擬合方法。
2.2 相對定位目標自適應選取策略
根據相對定位原理[8],理論上只要識別出一個相對定位目標就可以對直接目標進行定位計算。考慮到飛行中獲得的實時圖與提前偵察獲得的基準圖之間會有一定的變化,提取后的MSER特征區域不可能完全相同,其中一些特征區域并不適合作為相對定位目標。另外,還需要有一定數量的相對定位目標,這樣才能保證有較高的識別概率。因此,如何自動選取相對定位目標非常關鍵。如果設置固定的面積閾值,一方面可能會造成符合條件的特征區域過少甚至沒有,另一方面可能造成特征區域過多從而增加后續的匹配識別工作量。從識別的角度分析,相對定位目標應該具備面積較大、特征顯著、目標附近、數量適當等特點。因此,這里采用比例選取、總量控制、就近取點的策略來選取相對定位目標。具體方法如下,首先計算每一個特征區域的選擇權重指數,然后將所有特征區域按選擇權重指數從大到小排序,最后取前十個作為相對定位目標。選擇權重指數λi可以通過公式(1)得出:

其中,Si為特征區域面積;Li特征區域擬合橢圓中心與直接目標中心的距離。
3 相對定位目標的匹配識別
3.1 MSER 特征匹配
為了便于關聯特征間進行特征匹配,需要將提取的MSER特征區域進行規則化處理,即將不同尺寸的橢圓擬合區域映射為某個固定大小的圓形區域,從而消除尺度縮放和平移等因素的影響。互相關性在早期模板匹配中有較好的應用,但是不能抗旋轉、扭曲等畸變影響,而歸則化后的MSER區域原理上可以消除扭曲變形、尺度大小和旋轉方向上的差異。針對MSER區域這一優點,引入特征區域之間的互相關性指標corr作為匹配量度。兩個特征區域之間的互相關性指標可以通過式(2)得出:
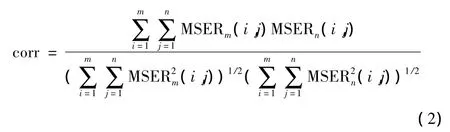
式中,MSERm(i,j),MSERn(i,j)分別代表兩幅圖像中的MSER區域的灰度值。
由于在基準圖上設定的相對定位點數量有限,且互相關性指標計算簡單,因此采用窮盡搜索法來尋找實時圖上的匹配特征區域。
3.2 雙層匹配矯正
當特征區域之間灰度信息區別明顯時,直接采用相關性指標,設置恰當的閾值時即表示實現正確匹配。但對于復雜地面建筑物圖像,出現區域灰度信息接近的概率很高,因此會出現一對多的誤匹配情況。針對這個問題,文獻[9]中采用RANSAC算法[10]來消除誤匹配。但是,RANSAC算法計算參數的迭代次數沒有上限,尋找這樣的支撐點集需要的迭代次數非常高,將會浪費很多的時間。針對以上不足,文中設計了一種雙層匹配識別策略。首先對匹配特征對進行預檢測,即利用位置權重指數μ來消除大量的誤匹配情況,對于每組一對多匹配,只取權重指數最大的一對,然后再采用RANSAC算法進一步剔除誤匹配特征對,最后實現相對定位目標的精確匹配識別。這種雙層匹配矯正策略既能減少RANSAC算法的迭代次數加快速度,又能進一步保證識別精度。位置權重指數μ可由公式(3)計算得出:

其中,corr為互相關性指標;d*為每對匹配特征區域擬合橢圓中心的2-范數。
4 實驗結果與分析
4.1 實驗結果的評價指標
根據相對定位原理,在相對定位目標識別過程中如果誤識別個數大于或等于正確識別個數時,理論上將不能正確定位直接目標。因此,本文以相對誤識別率RERP作為單次識別實驗的評價指標,來反映直接目標的定位精度;將絕對誤識別率AERP作為多次識別實驗的評價指標,來考察算法的魯棒性[11-12]。
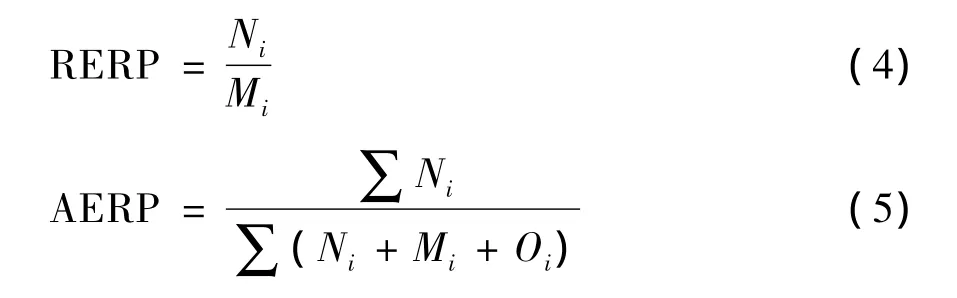
其中,Ni為第i次單次識別實驗中的誤識別個數;Mi為正確識別個數;Oi為不能識別的個數。
4.2 實驗結果及分析
實驗環境為:Intel酷睿1.7 G處理器,4G內存,Windows 8操作系統,MatlabR2014a計算平臺。實驗選取10組不同類型的復雜地面場景圖像采用MSER特征和SIFT特征進行相對定位目標的選取與識別對比實驗。表1給出本次實驗的對比結果。可以看采用SIFT特征算法的誤識別率和平均耗時都高于本文算法。
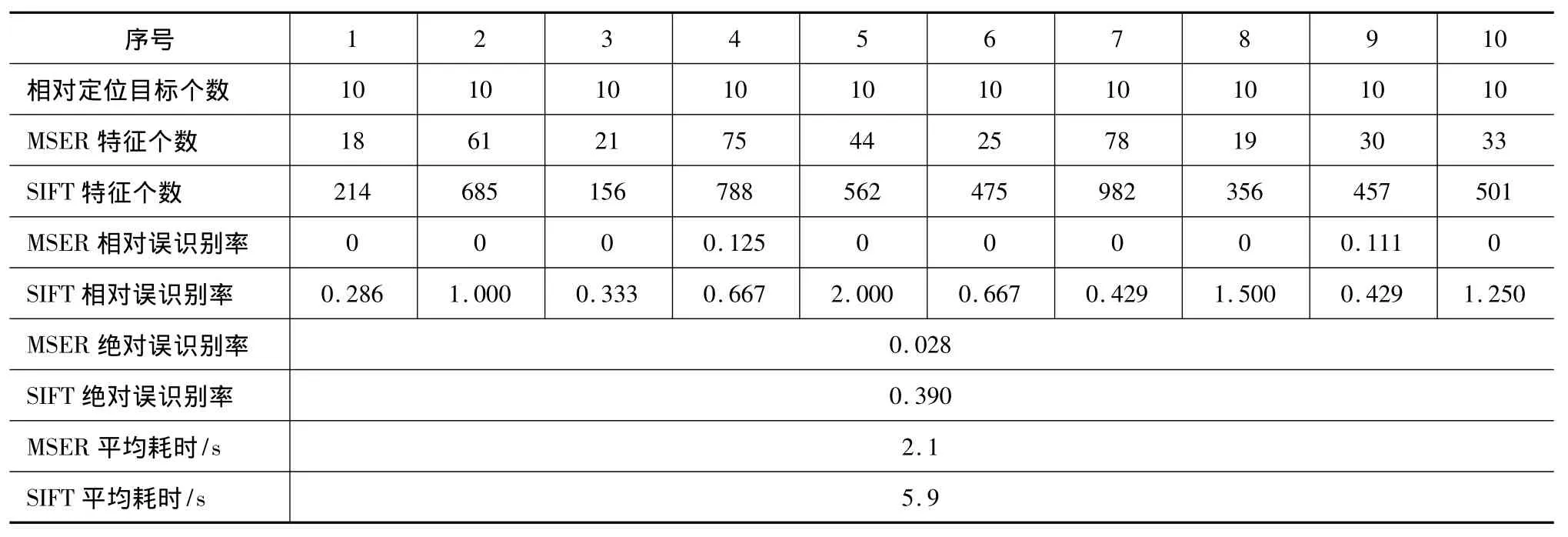
表1 誤識別率統計結果Tab.1 Statistic result of error recognition probability
圖2和圖3分別為利用可見光和紅外前視圖像進行相對定位目標識別仿真實驗的結果。其中,圖中左半部分為基準圖,右半部分為實時圖,用橢圓表示提取的特征區域。基準圖中用本文算法在直接目標(矩形框)周圍自適應選取的10個特征區域作為相對定位目標。圖2中實時圖與基準圖存在較大的視角差異和一定的旋轉變換,實時圖共提取了18個特征區域,采用本文算法進行匹配識別,正確識別出7個相對定位目標,沒有誤識別,實驗測重考察算法的抗旋轉畸變能力。圖3中基準圖和實時圖存在較大的尺度差異,并帶有一定的橫向偏差,實時圖共提取了61個特征區域,最終正確識別出6個相對定位目標,沒有誤識別。實驗主要考察算法的抗尺度變化能力。
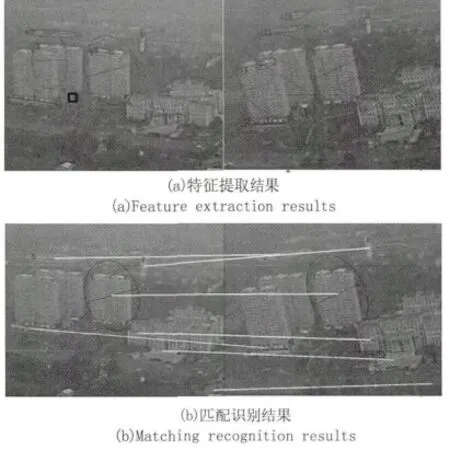
圖2 可見光圖像識別Fig.2 Recognition of optical images
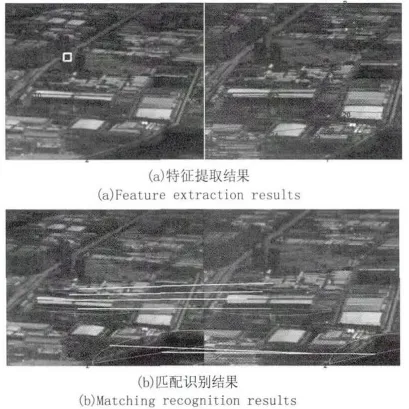
圖3 紅外圖像識別實驗Fig.3 Recognition of infrared images
5 結論
本文提出了一種新的相對定位目標選取與識別方法。算法利用具有仿射不變性的MSER特征區域作為相對定位目標,根據MSER特征的選擇權重指數自適應選取具有較好顯著特性的區域作為相對定位目標,解決了成像末制導相對定位技術中相對定位目標選取質量難于控制的問題。基于MSER特征選取的相對定位目標對尺度變化和圖像旋轉具有不變性,解決了基準圖像與實時圖像之間可能存在尺度和旋轉角度差異而造成的誤識別問題。根據互相關性準則進行有效的特征粗匹配,利用雙層匹配矯正策略剔除誤匹配,實現了對相對定位目標的準確識別。實驗結果表明,針對復雜地面建筑場景,該方法的相對誤識別率最大為0.125,絕對誤識別率僅為0.028。基本滿足相對定位技術的要求,為相對定位技術在成像末制導上的應用提供了有利的條件。
[1] MING Delie,TIAN Jinwen.Automatic infrared condensing tower target recognition using gradient vector features[J].Journal of Astronautics,2010,31(4):1190-1194.(in Chinese)明德烈,田金文.紅外前視對一類特殊建筑目標識別技術研究[J].宇航學報,2010,31(4):1190-1194.
[2] SONG Dan,TANG Linbo,ZHAO Baojun.The object recognition algorithm based on affine histogram of oriented gradient[J].Journal of Electronics & Information Technology,2013,35(6):1429-1434.(in Chinese)宋丹,唐林波,趙保軍.基于仿射梯度方向直方圖特征的目標識別算法[J].電子與信息學報,2013,35(6):1429-1434.
[3] YANG Xiaoyu,ZHANG Tianxu,LU Ying.Building recognition based on geometric modeling FLIR images sequences[J].Journal of Infrared,Millimeter,and Terahertz Waves,2009,30(5):468-483.
[4] LIU Jing,SUN Jiyin,ZHU Junlin,et al.FLIR scene matching algorithm for complex ground target[J].Application Research of Computers,2010,27(1):350-352.(in Chinese)劉婧,孫繼銀,朱俊林,等.復雜地面目標前視紅外景象匹配算法[J].計算機應用研究,2010,27(1):350-352.
[5] LI Zhijun,LIU Yang,CHEN Zengping,et al.Relative positioning technology of FLIR ground targets in terminal guidance[J].Infrared and Laser Engineering,2012,41(11):2861-2864.(in Chinese)李志軍,劉洋,陳曾平,等.前視紅外地面固定目標末制導相對定位技術[J].紅外與激光工程,2012,41(11):2861-2864.
[6] Matas J,Chum O,Urban M,et al.Robust wide-baseline stereo from maximally stable external regions[J].Image Vision Computing,2004,22(10):761-767.
[7] K Mikolajczyk,T Tuytelaars,et al.A comparison of affine region detectors.IJCV,2005,65(1-2):43-72.
[8] ZHANG Guangjun,WEI Zhenzhong.A novel calibration approach to structured light 3D vision inspection[J].Optics & Laser Technology,2002,34(5):373-380.
[9] CHEN Bin,ZHAO Yigong,et al.A new approach to scene matching during electro-optical imaging terminal guidance[J].Acta Optica Sinica,2010,30(1):163-165.(in Chinese)陳冰,趙亦工,等.一種新的光電成像末制導景象匹配方法[J].光學學報,2010,30(1):163-165.
[10] R Hartley,A Zisserman.Multiple view geometry in computer vision[M].2nded.Cambridge:Cambridge University Press,2003:290-293.
[11] ZHANG Shengchong,CAI Jun,et al.Algorithm to reduce false alarm of IR small targets detection in complex background[J].Laser & Infrared,2015,45(2):221-224.(in Chinese)張晟翀,蔡軍,等.復雜背景下減少紅外小目標檢測虛警率的算法[J].激光與紅外,2015,45(2):221-224.
[12] CHENG Xiangzheng,ZHAO Wei,et al.Registration method between high-low resolution images based on calibration information[J].Laser & Infrared,2015,45(2):214-220.(in Chinese)程相正,趙威,等.基于標定信息的高低分辨率圖像配準方法[J].激光與紅外,2015,45(2):214-220.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
