外骨骼機器人柔性變剛度驅動器設計
2015-03-23 11:28:38馬挺郭險峰
科技資訊
2014年35期
馬挺++郭險峰
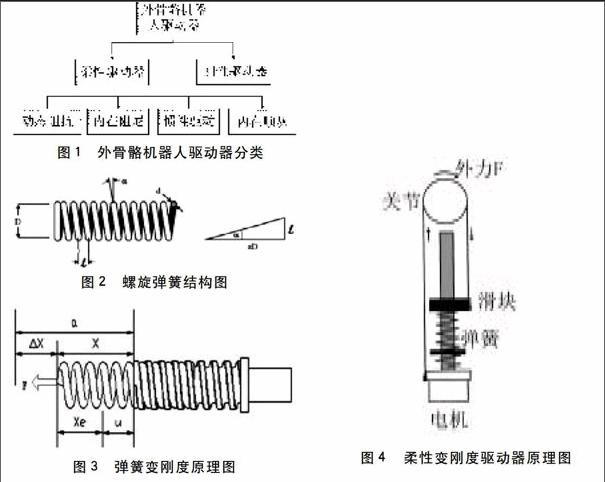


摘 要:關節驅動器是外骨骼機器人的核心組成部分,目前傳統的剛性驅動器的缺點是:體積大、能耗多以及無法避免外界沖擊。為此該文提出一種全新的柔性變剛度驅動器,其基于彈簧的剛度控制,并對此柔性機構進行了理論驗證,結果表明全新的柔性變剛度驅動器很好地解決了傳統剛性驅動器的主要缺點。
關鍵字:外骨骼 柔性變剛度驅動器 彈簧
中圖分類號:TP24 文獻標識碼:A 文章編號:1672-3791(2014)12(b)-0065-03
外骨骼原指為生物提供保護和支持的外部結構,外骨骼機器人可以理解為一種結合了人的智能和機器人機械能量的人機結合可穿戴裝備[1],可以增強穿戴者機能的一種裝備,包括機械結構、相關制動器、彈性部件、傳感器和控制元件重量等,還遠遠達不到實際應用的要求[2]。
如今,外骨骼機器人越來越多的應用于輔助康復功能訓練,患者通過穿戴外骨骼機器人,可以進行有效的功能康復訓練,達到促進神經系統功能恢復、提高日常生活活動能力的目的[2]。但是,目前絕大多數外骨骼機器人,包括BLEEX[3]、HAL[4]、LoKomat[5]等,其結構均基于“電機+剛性傳動副”直接驅動各關節的方式,這種方式帶來的無法避免干擾和外界沖擊、體積較大以及耗能多等原理上的弊端,因此研究應用于外骨骼機器人上的柔性驅動器顯得十分重要。該文將設計一種全新的、能夠使外骨骼機器人結構輕巧的柔性驅動器,而且新的柔性驅動器具備吸收消減多余沖擊、減小電機能耗以及輔助出力的特點。……
登錄APP查看全文
