基于AMESim的駕駛員操縱裝置阻尼特性研究
2015-04-03 06:51:40許志林
教練機 2015年4期
許志林,傅 強,萬 明
(1.中航工業洪都,江西 南昌330024;2.駐320廠軍事代表室,江西 南昌330024)
0 引 言
在電傳飛行控制系統中,對駕駛員操縱裝置的阻尼比提出了明確要求,國軍標要求阻尼比ζ一般應在0.5~1之間。傳統的設計方法中,針對阻尼器阻尼比的參數設定,需要通過繁雜的數學計算來分析合理的值,且需要反復進行迭代,數據量較大,很容易出錯。本文利用LMS Imagine.Lab AMESim仿真軟件對某一設定的駕駛員操縱裝置進行建模及仿真分析。
1 駕駛員操縱裝置參數要求
本文列舉任意一例駕駛員操縱裝置的橫向操縱部分參數,進行仿真分析。理論參數假定設置如下:
啟動力(操縱點處):8N;
橫向最大操縱力:±50N;
阻尼比ζ:0.5~0.85
橫向最大操縱位移(操縱點處):±50mm;
橫向操縱點至橫向載荷機構的傳動比:230mm/ 60mm;
橫向操縱點至橫向阻尼器的傳動比:230mm/ 60mm;
駕駛桿手柄/傳動機構等等效至操縱點的質量:2 kg。
2 系統建模
駕駛員操縱裝置主要由駕駛桿手柄、傳動桿系、載荷機構和阻尼器等組成,建立如圖1所示的系統模型,輸入信號1模擬給駕駛桿提供的一個初始力,使駕駛桿保持在橫向最大操縱位移處,在第1秒的時候開始釋放。階躍信號初始值設置為60,階躍值為0,階躍時間為1s。
等效質量塊2為具有摩擦力和限位裝置的模型,模擬限位裝置、啟動力(摩擦力)和傳動機構的慣量。等效質量塊2的參數設置為:
質量:2kg;

圖1 駕駛員操縱裝置建模
庫侖摩擦力:0.5N;
靜摩擦力:0.5N;
最低限制位移:-50mm;
最高限制位移:50mm;
其他值為默認值。
等效傳動桿系3為模擬駕駛員操縱裝置的傳動比,L1端臂長設為230mm,L2端臂長設為60mm。
阻尼器4和等效彈簧載荷機構5共同組成駕駛員操縱裝置的人感系統。等效彈簧載荷機構5的相關參數根據橫向操縱參數計處獲得。
3 阻尼器阻尼系數確定
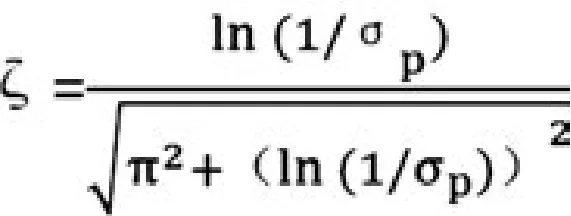
阻尼器的阻尼系數一般為可調節值,為了使阻尼器的可調節參數設置于最佳區間,現使用批處理的方法來進行仿真分析。阻尼器阻尼系數的初步批處理數值見表1。操縱點T的批處理仿真結果見圖2所示。

表1 阻尼系數的初步批處理數值 單位:N/(m/s)

圖2 不同阻尼系數時的操縱點T批處理仿真時域曲線
根據超調量σ與阻尼比ζ的關系式:

得:
利用AMESim后處理功能,得出變阻尼系數情況下的系統阻尼比結果如圖3所示。
根據后處理結果可得出,在給定的條件下,阻尼器的阻尼系數范圍在600~750 N/(m/s)之間時,可實現阻尼比在0.5左右;阻尼器的阻尼系數在1950 N/ (m/s)左右時,可實現阻尼比為0.85。
再通過縮小間隙,分別求解兩極限值的的阻尼比,可知,阻尼比為0.5時,阻尼器的阻尼系數為670 N/(m/s);阻尼比為0.85時,阻尼器的阻尼系數為1880 N/(m/s)。因此,在其他條件一定的情況下,當阻尼器的阻尼系數在670 N/(m/s)~1880 N/(m/s)之間時,系統阻尼比在0.5~0.85之間,系統的阻尼比隨著阻尼器的阻尼系數的增大而增加。

圖3 不同阻尼系數后處理阻尼比結果
4 系統質量對阻尼特性的影響分析
前面已對既定的模型分析得出了比較合理的阻尼系數范圍,本節設定阻尼系數為一給定常量800N/ (m/s),將等效質量列為變量來分析質量變化對阻尼特性的影響,等效質量的批處理數值見表2,批處理仿真時域曲線見圖4。
利用AMESim的后處理功能,得出變等效質量情況下的系統阻比如圖5所示。
綜合時域曲線和后處理結果可知,在阻尼系數為恒值時,系統阻尼比隨著系統等效質量 (轉動慣量)的增加而減小。

表2 等效質量的批處理數值 單位:kg
圖4 變等效質量的操縱點T批處理仿真時域曲線
5 系統摩擦力對阻尼特性的影響分析
5.1 系統靜摩擦力對阻尼特性的影響分析
設定阻尼系數為一給定常量800N/(m/s),等效質量也為一給定常量2kg,動摩擦力設為0.5N,靜摩擦力列為變量,分析靜摩擦力變化對阻尼特性的影響,靜摩擦力的批處理數值見表3(批處理參數值設置時考慮了靜摩擦力不應小于動摩擦力),批處理仿真時域曲線見圖6。
利用AMESim的后處理功能,得出變靜摩擦力情況下的系統阻比如圖7所示。

圖5 變等效質量后處理阻尼比結果

表3 靜摩擦力的批處理數值單位:N
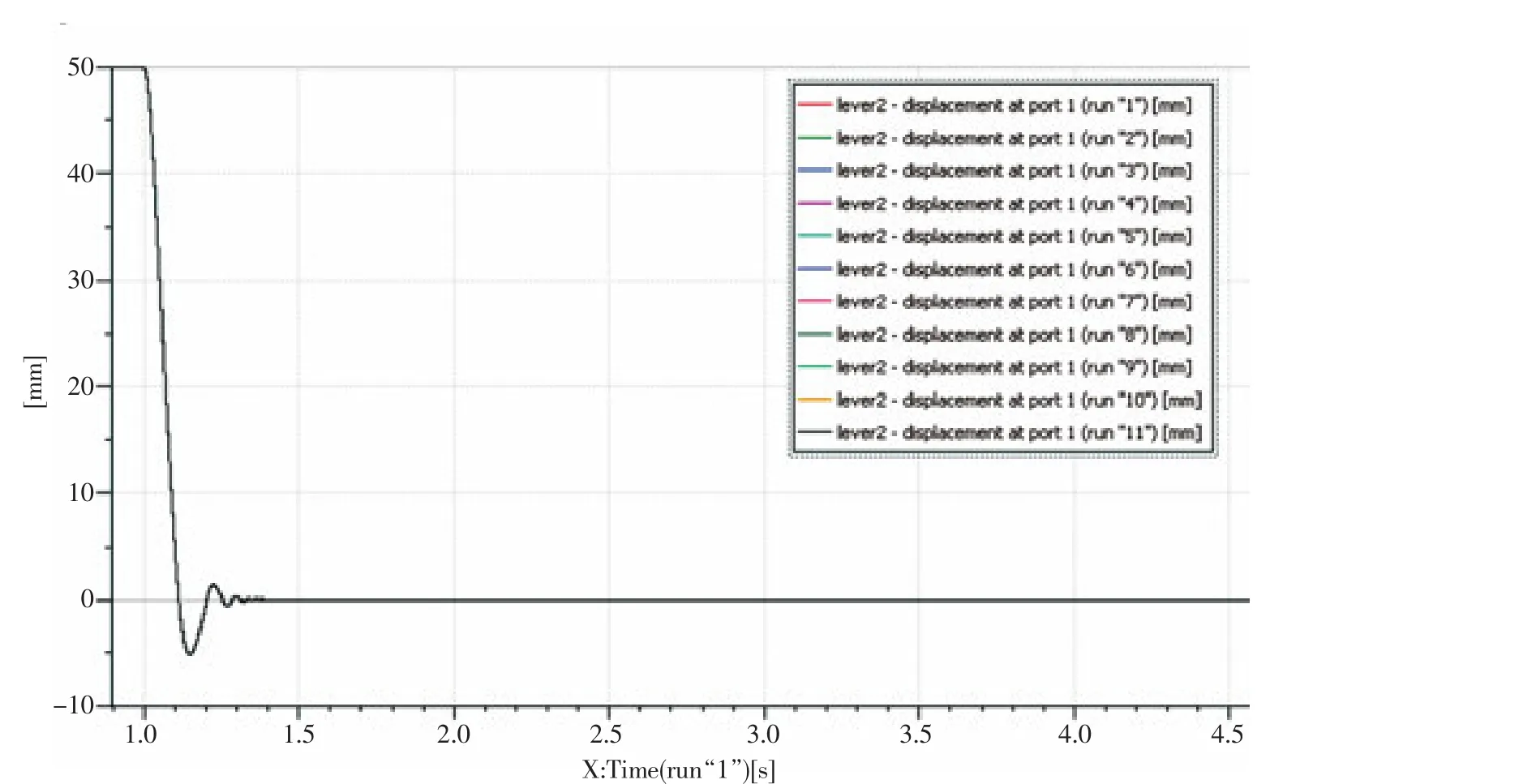
圖6 變靜摩擦力的操縱點T批處理時域曲線
由批處理的時域曲線和后處理結果可知,在其他參數為恒值時,在系統靜摩擦力逐漸增加的過程中,系統阻尼比不發生變化。

圖7 變靜摩擦力后處理結果
5.2 系統靜摩擦力對阻尼特性的影響分析
設定阻尼系數為一給定常量800N/(m/s),等效質量也為一給定常量2kg,靜摩擦力設為5N,動摩擦力列為變量,分析動摩擦力變化對阻尼特性的影響,動摩擦力的批處理數值見表4(批處理參數值設置時考慮了靜摩擦力不應小于動摩擦力),批處理仿真結果見圖8。
利用AMESim的后處理功能,得出變動摩擦力情況下的系統阻尼比如圖9所示。
由批處理的時域曲線和后處理結果可知,在其他參數為恒值時,系統阻尼比隨著動摩擦力的增加而增加。

表4 動摩擦力的批處理數值 單位:N
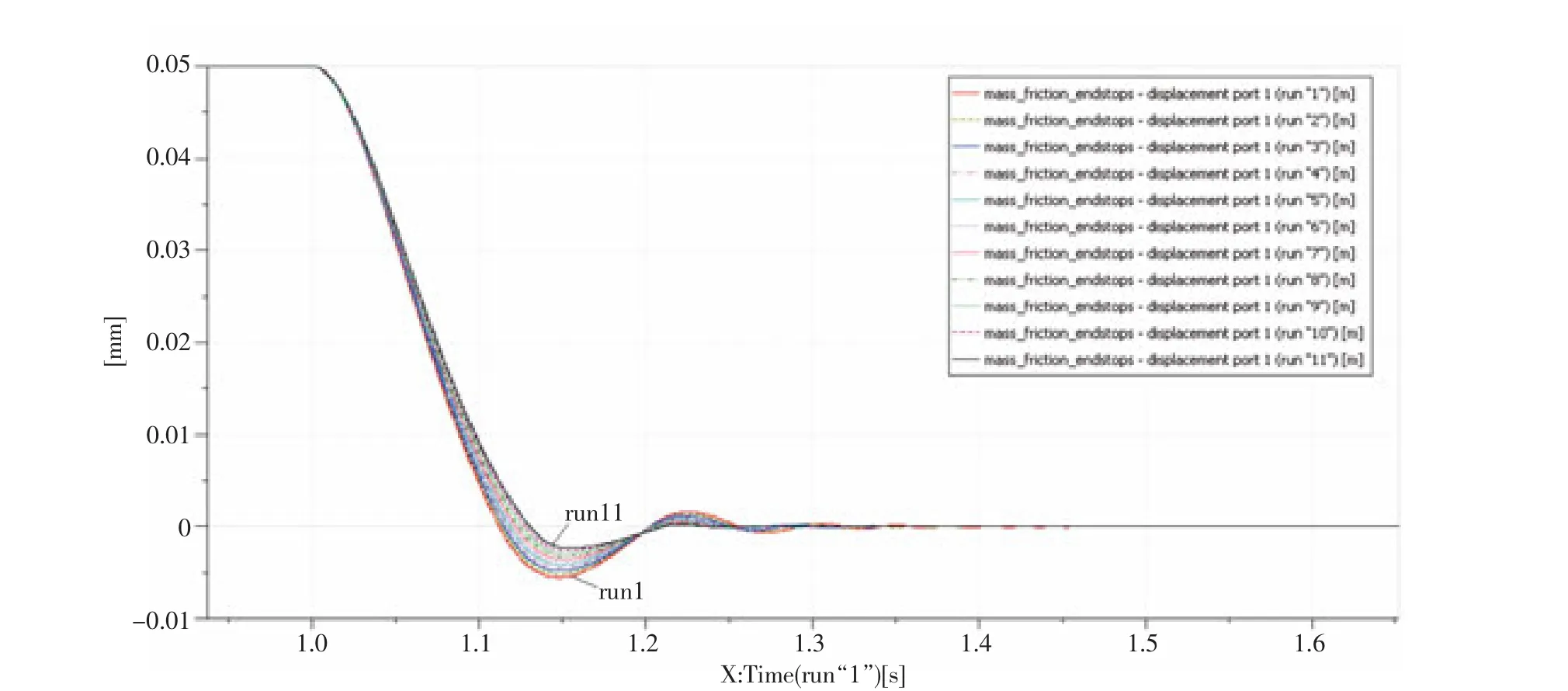
圖8 變動摩擦力的操縱點T批處理時域曲線

圖9 變動摩擦力后處理結果
6 系統啟動力(預載)對阻尼特性的影響分析
設定阻尼系數為一給定常量800N/(m/s),等效質量為一給定常量2kg,靜摩擦力設為0.5N,動摩擦力也為0.5N,分析啟動力變化對阻尼特性的影響,啟動力的仿真數值見表5。
仿真結果見圖10,利用AMESim的后處理功能,得出變啟動力情況下的系統阻比如表6所示。
由仿真結果可知,在其他參數為恒值時,系統阻尼比隨著啟動力的增加而逐漸減小。

表5 啟動力的仿真數值 單位:N
7 結 論
本文研究了一種利用AMESim軟件提供快速建模仿真分析駕駛員操縱裝置的阻尼器參數的方法,在系統其他參數恒定的情況下,駕駛員操縱裝置的系統阻尼比:
1)隨系統質量的增加而增加;
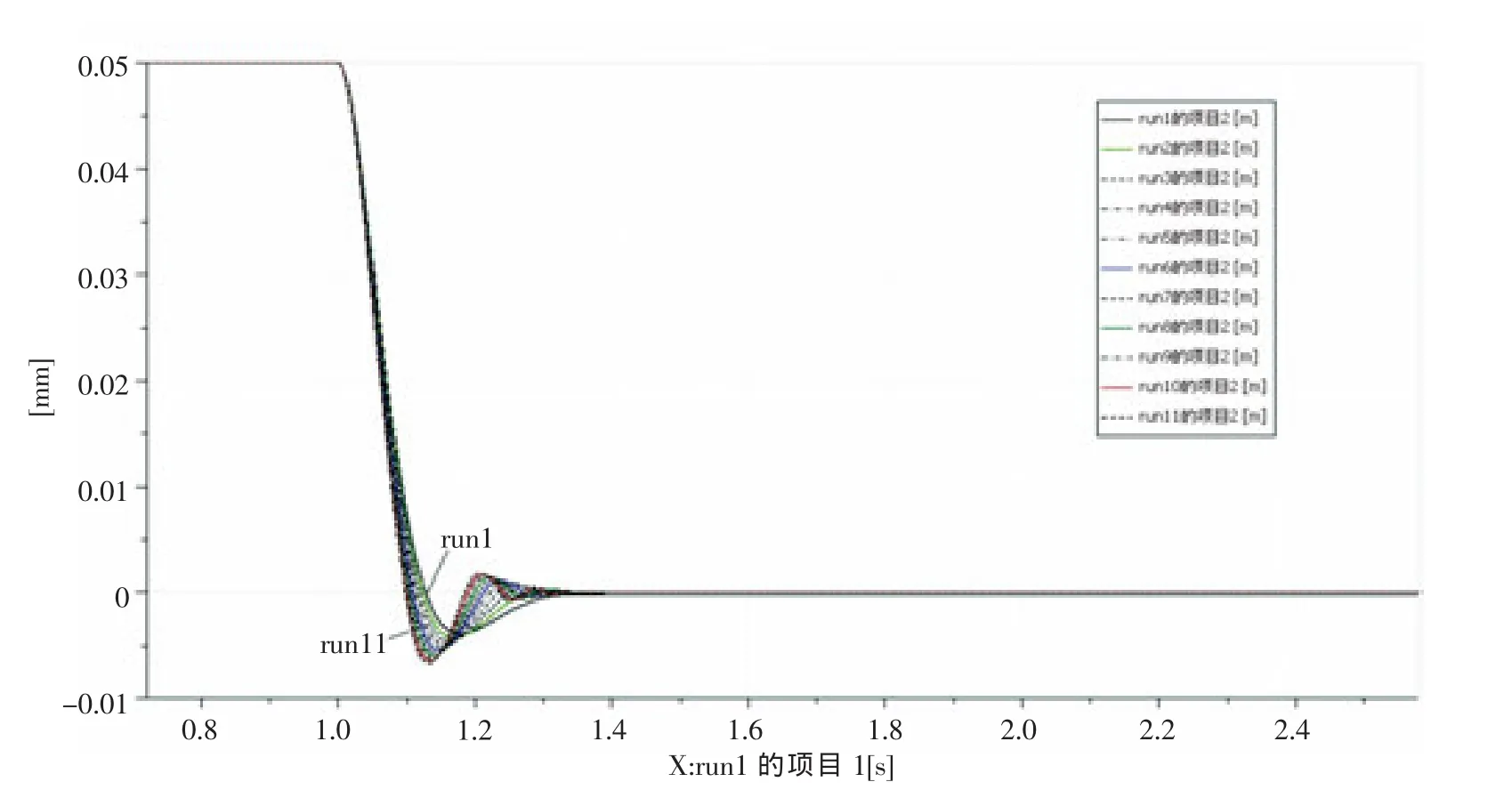
圖10 變啟動力(操縱點T)仿真分析

表6 變啟動力的仿真結果
2)隨阻尼器阻尼系數的增加而增加;
3)與系統的靜摩擦力無關;
4)隨系統動摩擦力的增加而增加;
5)隨系統動啟動力的增加而減小。
[1]王永熙.飛機設計手冊 第12冊.飛行控制系統和液壓系統設計.北京:航空工業出版社,2003.
[2]胡壽松.自動控制原理.北京:科學出版社,2001.
[3]付永領,祁曉野.LMS Imagine.Lab AMESim系統建模和仿真參考手冊.北京:北京航空航天大學出版社,2011.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
今日農業(2020年20期)2020-12-15 15:53:19
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
能源(2018年10期)2018-12-08 08:02:48
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車觀察(2016年3期)2016-02-28 13:16:26
