凹型端齒削弱永磁直線電機端部力波動方法
2015-04-06 06:19:58劉鐵法夏加寬荊汝寶孫宜標
電工技術學報 2015年7期
彭 兵 劉鐵法 張 囡 夏加寬 荊汝寶 孫宜標
(沈陽工業大學電氣工程學院 沈陽 110870)
?
凹型端齒削弱永磁直線電機端部力波動方法
彭 兵 劉鐵法 張 囡 夏加寬 荊汝寶 孫宜標
(沈陽工業大學電氣工程學院 沈陽 110870)
結合端面磁通函數和虛位移法推導PMLM端部效應產生的單端推力波動和法向力波動的解析表達式,揭示端部效應引起的推力波動和法向力波動的規律。通過對傅里葉級數的分析,提出反相位補償原理的凹型端齒結構,該結構能消除推力波動和法向力波動的奇次諧波,解決傳統的優化動子長度削弱推力波動但帶來電機縱向“俯仰運動趨勢”的缺點,同時還能消除動子橫向“俯仰運動趨勢”。最后以齒槽效應較弱的12槽11極PMLM為例,采用有限元仿真和實驗驗證,結果證明該方法能夠削弱端部效應產生的法向力波動和推力波動。
永磁直線電機 端部效應 端部效應法向力波動 端部效應推力波動 凹型端齒
0 引言
氣浮或磁浮的永磁直線電機直接驅動系統是高精密加工與高精密定位領域的主要發展方向之一,它要求直線電機具有優異的推力和法向力性能[1-4]。然而,永磁直線電機特有的縱向端部效應導致動子受到一定的法向力波動和推力波動(統稱為端部力),影響了加工或定位精度。
國內外文獻將齒槽效應和縱向端部效應產生的推力波動合稱為detent force,而縱向端部效應detent force是推力波動的一個主要原因[5,6]。半無限長動子是分析端部detent force的經典模型,文獻[5-8]均是基于該模型優化動子長度或端齒結構實現端部detent force的最小化,其中端部detent force的解析式是基于有限元仿真分析得出,缺乏嚴謹的數學模型和波動值的量化。等效磁網絡模型是分析端部detent force的另外一個重要方法,文獻[9,10]均是基于此模型的基礎上,采用能量法預測端部detent force,得到減小端部detent force的合適的端齒形狀,其端部detent force的解析表達式較復雜,難以預測端部detent force的特征。有導軌永磁直線電機動、定子之間強大的法向電磁吸引力一方面對負載平臺的強度有較高要求,另一方面引起摩擦力的攝動,法向電磁吸力的平均力是單邊平板型永磁直線電機研究的熱點[11-14]。文獻[15]指出齒槽效應和端部效應是引起法向力波動的主要原因,研究了齒槽法向力波動機理和磁極三段錯位削弱齒槽法向力波動的方法,從控制的角度提出了分相補償抑制端部效應引起的法向力波動,但未從電機本體設計上給出削弱端部法向力波動的方法。上述文獻均未分析削弱推力波動的方法對法向力波動的影響規律。
端部效應是影響電機法向力波動和推力波動的一個重要原因,本文以短初級永磁直線電機為研究對象,首先利用端部邊緣磁通函數和虛位移法推導出端部效應引起的法向力波動和推力波動的解析表達式,分析其主要諧波與電機長度參數的關系;然后從相位補償角度分析錯落結構端齒削弱端部力波動的原理,提出了“凹”型端齒結構;最后以12槽11極永磁直線電機為例,分別采用有限元仿真和實驗驗證該方法的有效性。
1 基于磁通函數的端部力解析分析
1.1 端部磁通函數
假設鐵心磁導率為無窮大;永磁體的磁導率與空氣相同;永磁體向外磁路提供的磁通為Φm。在無槽永磁直線電機中,永磁磁極發出的磁通可近似認為是一簇簇的同心圓(根據磁路最短原理,該封閉曲線實際為橢圓,見圖1d)。當電機動子運行時,穿過初級電樞鐵心縱向端面的磁通發生周期性變化。在x=0,如圖1a位置時,次級的交軸q1與初級的左邊緣重合,永磁體S1提供的一半磁通都穿過縱向端面邊緣,此時,穿過初級電樞鐵心左端面的磁通最大,最大值為Φ=Φm/2;隨著動子的運行,穿過端面的磁通越來越少,在x=τ/2,如圖1c位置時,穿過初級電樞鐵心左端面的磁通為零,即Φ=0;當初級繼續向右運動時,穿過初級電樞鐵心左端面的磁通逐漸變大,當運行到x=τ,如圖1d所示位置時,穿過初級電樞鐵心左端面的磁通又變為最大,Φ=Φm/2。當動子繼續向右運行時,又重復著上述的周期變化,可見初級電樞鐵心左端面的磁通函數波長為極距τ。

圖1 端部磁通示意圖Fig.1 Schematic diagram of magnetic flux through the edge
由上述定性分析,結合有限元仿真,可得到穿過動子縱向端面的磁通曲線,如圖2所示。
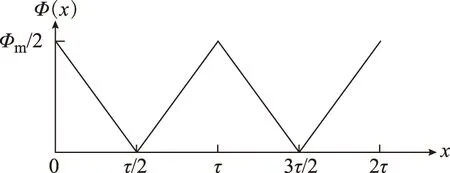
圖2 縱向端部邊緣磁通Φ(x)與x的近似關系Fig.2 Approximate relationship between Φ(x) and x
由圖2可寫出穿過縱向端面的磁通Φ(x)方程式
(1)
另外一端端面的磁通具有相似的變化規律,二者僅存在相位差,相位差取決于動子長度。設動子總長度為Ls,將(Ls+x)代入式(1)中,就可得到右端面的磁通方程。
1.2 端部力解析分析
由圖1可看出,臨近動子鐵心左側的磁極(圖1a~圖1c的S1,圖1d的N2)產生的磁通穿過動子鐵心縱向左側端面,最終回到動子鐵心下的磁極(圖1a~圖1c的N2,圖1d的S2)中。隨著動子位置的變化,穿過端面的磁通也發生了變化,等效認為磁極N2(或S2) 與動子鐵心間的磁場儲能發生了變化。根據電磁場知識可知,等效后的氣隙磁場儲能為
(2)
式中,B為磁感應強度;μ0為真空磁導率;Φ為穿過電樞鐵心縱向端部的磁通;S等效為半個磁極包圍的面積;δ為考慮開槽后的等效氣隙長度。
1)端部效應法向力
根據虛位移原理可知,左端端部效應引起的法向力及波動為
(3)
式(3)傅里葉級數為
(4)
由式(4)可看出,端部效應引起的單端法向力不僅包含恒定的電磁吸引力,還包含所有次法向力諧波,各次諧波的波長為τ/n。
用(Ls+x)代替式(4)中的x,則得到電機動子右端部法向力。如果Ls=kτ,電機動子左、右端部法向力完全一致;如果Ls=kτ+τ/2,電機動子左、右端部法向波動力的奇次諧波反相位,偶次諧波同相位,將會造成動子縱向“俯仰運動趨勢”。
2)端部效應推力
同樣根據虛位移原理可得左端部效應引起的推力波動為
(5)
式(5)傅里葉級數為
(6)
由式(6)可看出,端部效應引起的單端推力波動包含所有次諧波,各次諧波的波長為τ/n。
用(Ls+x)代替式(6)中的x,則得到電機動子右端部所受推力。如果Ls=kτ,電機動子左、右端部所受推力完全一致,整個電機受到的推力波動為二者的波動之和;如果Ls=kτ+τ/2,電機動子左、右端部所受推力的奇次諧波反相位,偶次諧波同相位,將會消除奇次推力波動,只剩下偶次推力諧波,動子受到的推力波動幅值約為Ls=kτ電機的2倍。
2 凹型端齒削弱端部力波動
根據式(4)和式(6)可知,端部效應引起的單端推力波動和法向力波動的基波波長均為τ,二者相差90°電角度。法向力二次諧波的峰值僅為基波的1/4,推力二次諧波的峰值僅為基波的1/2,可見,如果能消除端部力的基波分量,將能極大的削弱法向力和推力的波動。
對于式(4)中任意次法向力諧波的表達式為
(7)
如果將縱向邊端齒設計成如圖3所示單級樓梯步結構,兩個端面的寬度相等,錯落尺寸為Δx,則第一部分端部效應產生的n次法向力FNLn1=FNLn,用x+Δx代替式(7)中的x得出第二部分端部效應產生的n次法向力表達式
(8)則電機動子單端受到的n次法向力的合力為FNLn1+FNLn2。由式(7)、式(8)可知,當2πnΔx/τ=π,即Δx=τ/2n時,兩個錯落端面受到的n次法向力的相位相差180°,得以相互抵消,其原理如圖3所示。同理,該方法也抵消了n次推力諧波。當Δx=τ/2時,兩個錯落面端部力的奇次諧波相位均相反,僅剩下偶次諧波,法向力波動值約為傳統端齒結構電機的1/4,單端推力波動約為1/2,單級樓梯步型端齒電機動子的推力波動幅值與傳統端齒電機(動子長度為Ls=kτ+τ/2)基本相同。
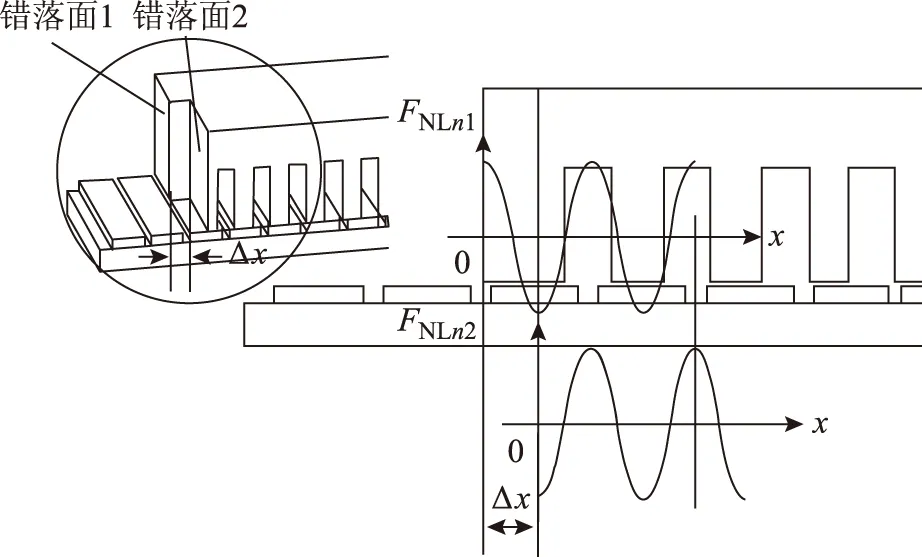
圖3 單級樓梯步端齒法的原理圖Fig.3 Schematic of single level staircase of end tooth method
這種單級樓梯步型端齒結構使得電機動子沿橫向受到的法向力和推力不均等,引起電機橫向“俯仰運動”趨勢和推力縱向“拉扯”趨勢。基于此,提出“凹”型端齒結構,邊齒的中間凹入部分寬度是兩側凸出部分寬度的2倍,圖4為采用“凹”型端齒結構的12槽11極PMLSM的三維模型及原理圖。

圖4 凹型端齒結構法Fig.4 Concave profile method of end tooth
由于端齒沿橫向對稱,“凹”型端齒結構法電機的動子能夠在不發生橫向“俯仰運動趨勢”和推力縱向“拉扯趨勢”情況下,消除n次端部力(包括法向力和推力)。
3 仿真與實驗
本文以齒槽法向力波動較弱的12槽11極永磁直線電機為例驗證“凹”型端齒結構削弱端部力波動的有效性,電機參數見表1。根據Δx=τ/2n可求出端部錯落尺寸為Δx=8 mm,“凹”型端齒電機的動子長度Ls=192 mm。作為對比實驗的非“凹”型端齒電機動子長度Ls=184 mm,Δx=0(工程應用中,為減小推力波動,傳統端齒電機動子長度大多選為Ls=kτ+τ/2)。
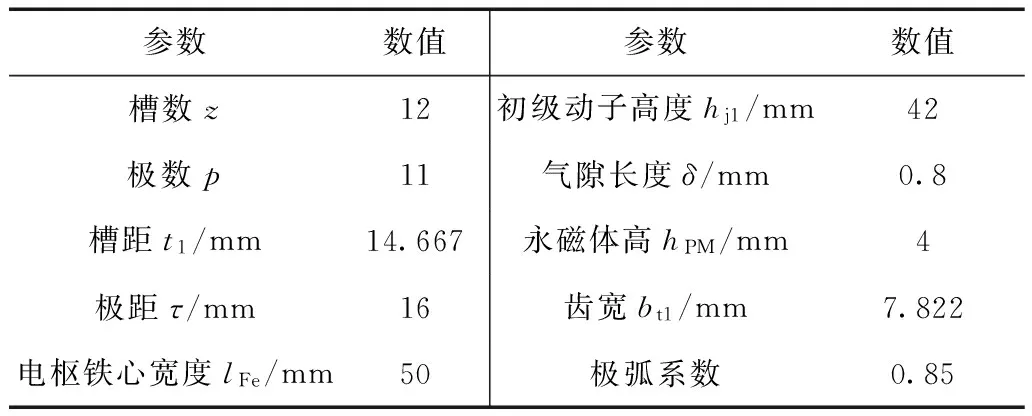
表1 電機參數Tab.1 Motor parameters
3.1 凹型端齒電機單端端部力波動的仿真分析
在仿真端部力時,采用了半無限長電機模型。圖5a為一個動子右半無限長電機,可仿真左端部受力;同理可建立一個動子左半無限長電機仿真右端部受力。仿真時,動子向右運行,運行的距離為τ。仿真結果如圖5b及圖5c所示,仿真結果均濾除了恒定分量,包括后文的實驗結果也作了同樣處理。
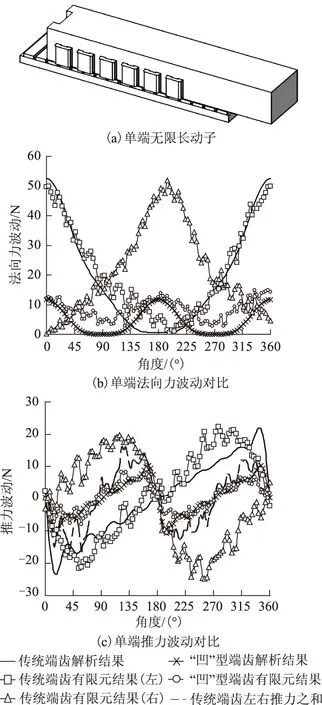
圖5 單端端部力仿真結果Fig.5 Simulation results of the single end force
由圖5可知,傳統端齒電機法向力和推力波動主要次諧波分量的波長為τ,左端部的法向力和推力波動與右端部力波動相位相反,動子有縱向“俯仰運動趨勢”,兩個端部的推力波動之和的波形與“凹”型端齒電機單端推力波動一致,幅值約為其2倍,這與1.2節的解析結果一致。采用“凹”型端齒結構電機的單端法向力和推力波動主要次諧波分量的波長變為τ/2,法向力波動值約為傳統端齒電機的1/4,單端的推力波動值約為傳統端齒電機的1/2,兩個端部受到的法向力和推力波動大小與相位基本相同(本文仿真只給出了一個端部力的波動波形),這與解析結果相一致,有限元仿真結果證明“凹”型端齒結構能有效消除單端端部力的主要次諧波,從而削弱了法向力和推力波動及動子有縱向“俯仰運動趨勢”。對于“凹”型端齒電機不會因為引入“凹”型端齒而改變電機的氣隙磁場和繞組因素,所以不會影響電機的平均推力。
3.2 “凹”型端齒結構電機的實驗
永磁直線電機法向力波動和推力波動靜態測試系統如圖6所示。
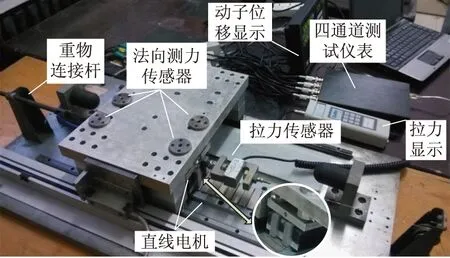
圖6 端部力靜態測試系統Fig.6 Static measurement system of the end force
該系統由檢測與顯示單元組成,檢測與顯示單元包括光柵尺、4個測量法向力的FC-WM微型拉力傳感器及BVM-300-4M四通道拉力測試儀、一個測量推力的拉力計及數顯拉力計表等。利用輔助安裝裝置將4個拉力傳感器安裝在工作臺和電機動子之間,并調節預緊力;測量推力的拉力傳感器安裝在動子與進給裝置之間。當調節進給裝置帶動動子在導軌上移動時,由光柵尺測量動子的相對位移,由數顯表讀出位移值。由拉力測試儀采集4個法向力傳感器數據,由數顯拉力計表讀出推力波動值。
圖7為采用“凹”型端齒結構前、后的實驗對比結果。由圖7a可知,“凹”型端齒結構電機的單端法向力波動的主要諧波波長為τ/2,而傳統端齒電機為τ;“凹”型端齒結構電機單端的法向力波動幅值約為傳統端齒電機的1/4,法向力波動被有效削弱,實驗結果與理論分析一致。由圖7b可知,動子長度Ls=kτ+τ/2=184 mm、△x=0的傳統非“凹”型端齒電機與“凹”型端齒結構電機的推力波動基本一致;“凹”型端齒電機的整個動子受到的推力波動約為單端推力波動的2倍,實驗結果與解析分析的波形趨勢一致,進一步證明了所提出解析法的可靠性。
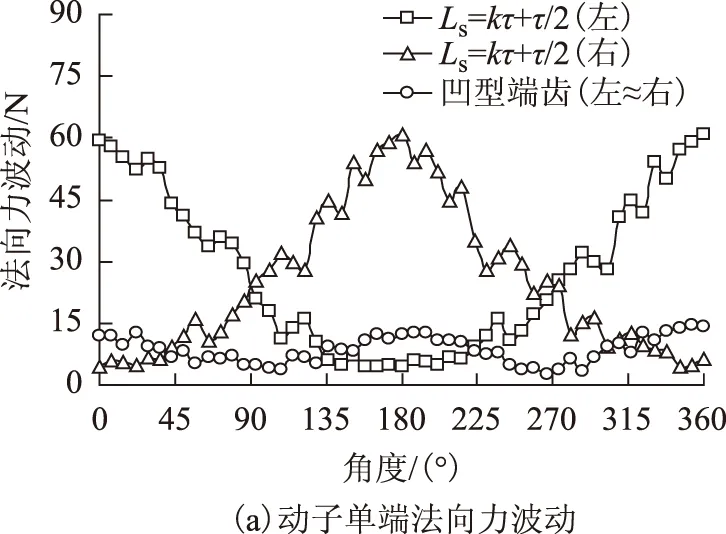
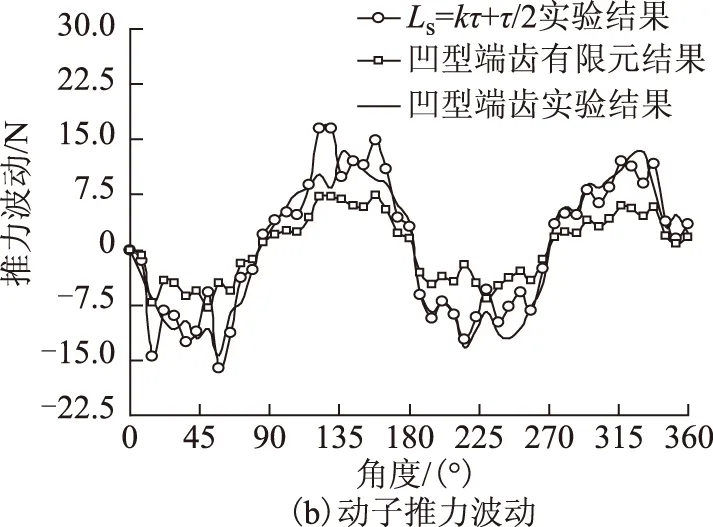
圖7 端部力靜態測試結果Fig.7 Static measurement results of the end force
4 結論
本文研究了永磁直線電機動子縱向端部磁通變化規律與單端法向力波動和推力波動之間的內在關系,提出“凹”型端齒結構削弱端部力波動的方法,通過解析分析、有限元仿真和實驗驗證,得出如下結論:
1)動子“凹”型端齒結構永磁直線電機相較于傳統端齒電機,單端法向力主要諧波的次數提高了1倍,幅值約為傳統端齒電機的1/4;單端推力主要諧波的次數也提高了1倍,幅值約為傳統端齒電機的1/2。
2)“凹”型端齒結構永磁直線電機整個動子受到的推力波動為單端推力波動的2倍,與動子長度為Ls=kτ+τ/2電機的波動次數與波動幅值基本相同,但消除了Ls=kτ+τ/2電機的動子縱向“俯仰運動趨勢”。
3)以一臺12槽11極永磁直線電機為例,將解析結果與仿真結果及實驗值相比較,前者與后兩者的波形基本吻合,證明了解析計算與“凹”型端齒結構削弱端部力波動的可靠性和有效性。
[1] 李小平,李志科,陳學東,等.納米精度運動臺電機伺服參數校準方法研究[J].中國電機工程學報,2009,29(21):87-92. Li Xiaoping,Li Zhike,Chen Xuedong,et al.Calibration method for motor servo parameters of nano-precision motion stage[J].Proceedings of the CSEE,2009,29(21):87-92.
[2] Young-Man Choi,Dae-Gab Gweon.A high-precision dual-servo stage using halbach linear active magnetic bearings[J].IEEE/ASME Transactions on Mechatronics,2011,16(5):925-931.
[3] Owen R B,Maggiore M,Apkarian J.A high-precision,magnetically levitated positioning stage:toward contactless actuation for industrial manufacturing[J].IEEE Control Systems Magazine,2006,26(3):82-95.
[4] Li Hong,Zhou Yunfei,Shi Yangchun.Motion control for wafer stage of 0.1 μm lithography[C].IEEE International Conference on Integration Technology,Shenzhen,China,2007:338-342.
[5] Zhu Z Q,Xia Z P,Howe D,et al.Reduction of cogging force in slotless linear permanent magnet motors[J].IEE Proceedings Electric Power Applications,1997,144(4):277-282.
[6] Zhu Yu-wu,Lee Sang-Gun,Chung Koon-Seok,et al.Investigation of auxiliary poles design criteria on reduction of end effect of detent force for PMLSM[J].IEEE Transactions on Magnetics,2009,45(6):2863-2866.
[7] 徐月同,傅建中,陳子辰.永磁直線同步電機推力波動優化及實驗研究[J].中國電機工程學報,2005,25(12):122-126. Xu Yuetong,Fu Jianzhong,Chen Zichen.Thrust ripple optimization and experiment for PMLSM[J].Proceedings of the CSEE,2005,25(12):122-126.
[8] 潘開林,傅建中,陳子辰.永磁直線同步電機的磁阻力分析及其最小化研究[J].中國電機工程學報,2004,24(4):112-115. Pan Kailin,Fu Jianzhong,Chen Zichen.Detent force analysis and reduction of PMLSM[J].Proceedings of the CSEE,2004,24(4):112-115.
[9] 王昊,張之敬,劉成穎.永磁直線同步電機定位力分析與實驗研究[J].中國電機工程學報,2010,30(15):58-63. Wang Hao,Zhang Zhijing,Liu Chengying.Detent force analysis and experiment for permanent magnet linear synchronous motor[J].Proceedings of the CSEE,2010,30(15):58-63.
[10]Xu Xiaozhuo,Wang Xudong,Si Jikai,et al.Detent force analysis and optimization for vertical permanent-magnet linear synchronous motor with fractional-slot windings[J].Journal of Computers,2013,8(3):756-763.
[11]盧琴芬,張新敏,黃立人,等.錯位式雙邊型永磁直線同步電機優化設計[J].電工技術學報,2013,28(11):35-41. Lu Qinfen,Zhang Xinmin,Huang Liren,et al.Optimal design of shifted type double-sided permanent magnet linear synchronous motors[J].Transactions of China Electrotechnical Society,2013,28(11):35-41.
[12]陸華才,江明,郭興眾,等.永磁直線同步電機推力波動約束[J].電工技術學報,2012,27(3):128-132. Lu Huacai,Jiang Ming,Guo Xingzhong,et al.Thrust ripple suppression for permanent magnet linear synchronous motor[J].Transactions of China Electrotechnical Society,2012,27(3):128-132.
[13]Profumo F,Tenconi A,Gianolio G.Design and realization of a PM linear synchronous motor with a very high thrust/normal force ratio[C].Industry Applications Conference,Chicago,USA,2001:1984-1988.
[14]Overboom T T,Smeets J P C,Jansen J W,et al.Semianalytical calculation of the torque in a linear permanent-magnet motor with finite yoke length[J].IEEE Transactions on Magnetics,2012,48(11):3575-3578.
[15]沈麗.高精度永磁直線伺服電機法向力波動分析與抑制方法研究[D].沈陽:沈陽工業大學,2014.
A Method for Reducing the End Effect Force Fluctuation by the Concave Profile End-tooth in Permanent Magnet Linear Motors
PengBingLiuTiefaZhangNanXiaJiakuanJingRubaoSunYibiao
(Electric Engineering Institute of Shenyang University of Technology Shenyang 110870 China)
Analytical expressions of the normal component and the thrust component of the end force are obtained by integrating the virtual displacement principle,which is described by the flux distribution on the longitudinal end face of the rotor.Through the analysis of the Fourier series,the concave profile end tooth structure considering the reverse phase compensation principle is put forward.The structure can eliminate the odd harmonic wave of the normal and thrust force fluctuations.It can also overcome the shortcomings of the traditional methods which lead to the motor’s longitudinal pitching movement trend by optimizing rotor length to reduce the thrust fluctuation.The rotor’s lateral pitching movement trend can be eliminated by the structure too.In the end,A 12 slots 11 poles PMLM with weaker slot effect is taken for example.The finite element simulation and experiment are employed,and the results show that the method can reduce the normal and thrust ripples of the end effect force.
Permanent magnet linear motor (PMLM),end effect,normal component of the end effect force,thrust component of the end effect force,concave profile end-tooth
國家自然科學基金(51377108),遼寧省高等學校創新團隊項目(LT2013006)和國家科技重大專項子課題(2012ZX04001-011-003)資助項目。
2014-12-22 改稿日期2015-02-01
TM351
彭 兵 男,1975年生,博士,副教授,研究方向為永磁伺服電機的設計與控制。(通信作者)
劉鐵法 男,1992年生,碩士研究生,研究方向為永磁伺服電機的設計與控制。