基于ADAMS 的變位機虛擬樣機動力學仿真分析
2015-04-09 12:36:30唐艷華趙永生
重型機械 2015年6期
唐艷華,趙永生
(1.燕山大學河北省并聯機器人與機電系統實驗室,河北 秦皇島 066004;2.燕山大學先進鍛壓成型技術與科學教育部重點實驗室,河北 秦皇島 066004)
0 前言
變位機是將工件回轉并傾斜,使工件置于有利加工位置的變位機械,主要用于機架、機座、機殼、法蘭、封頭等非長形焊件的翻轉變位,也可以在其上從事切割、堆焊、噴涂等作業[1]。在重型機械切削加工過程中,工件質量大,形狀不規則,且包含個數、位置、尺寸均不相同的待加工孔,需要在變位機上完成裝夾定位[2]。由于在工作過程中,變位機需要通過旋轉和翻轉將水平放置的工件擺放到工件的加工位置,而工件在變位機上的裝夾位置并不確定,旋轉、翻轉亦沒有固定的順序,因此變位機承受的載荷并不固定,它隨著工件以及工作位置的不同而變化。
1 變位機結構組成
應某公司設計要求:工件最大質量60 t,變位機工作臺直徑5000 mm,夾持工件最大直徑4500 mm,工作平臺翻轉角度范圍0~70°,工作平臺自身旋轉角度范圍0~360°,自行設計開發兩自由度變位機,其三維實體簡化模型如圖1所示。
該變位機具有旋轉和翻轉兩個自由度,主要由旋轉工作臺、翻轉架和底座三大部分組成,翻轉機構由兩個液壓馬達同時驅動,通過滑動絲杠帶動絲母在其軸線方向上移動,以實現翻轉架的翻轉運動。翻轉架的上部通過外齒圈交叉滾子轉盤軸承與旋轉工作臺連接,且為旋轉夾緊機構的支座;下部(即腿部)與絲母固連。變位機的翻轉機構主體通過翻轉軸放置在變位機基座上。
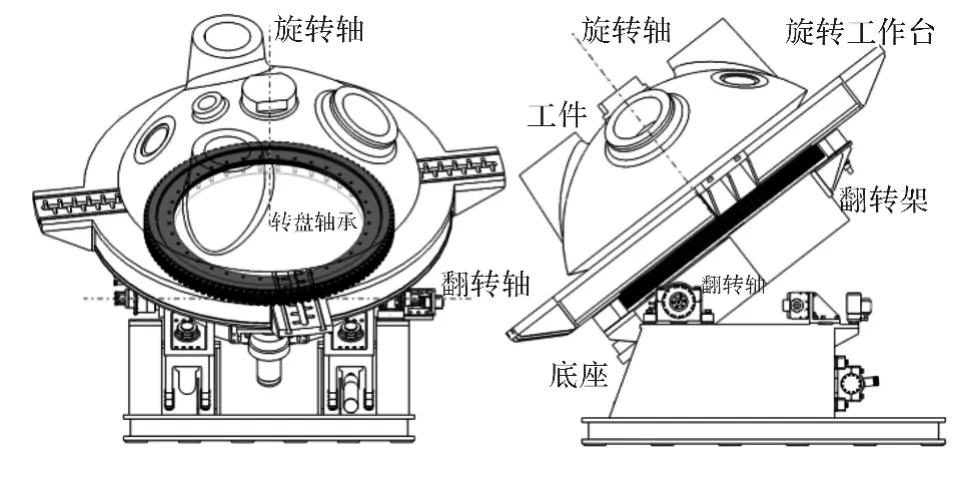
圖1 重型變位機三維實體簡化模型Fig.1 3D solid model of heavy positioner
2 變位機ADAMS 模型建立
采用MSC 公司的ADAMS 仿真分析軟件,其采用多剛體系統動力學理論,采用拉格朗日方程方法來建立系統動力學方程,可以對虛擬機械系統進行靜力學、動力學、運動學分析,并輸出位移、速度、加速度、作用力曲線[5-6]。
利用ADAMS 與Solidworks 的接口,首先在Solidworks 中按照變位機的實際結構尺寸建立變位機的三維實體模型,然后將三維實體模型導入到ADAMS/View 中。導入模型后,需要重新定義各個部件的材質等質量參數,以及在具有相對運動的部件間建立運動副,并添加相應的驅動。兩自由度變位機的ADAMS 實體模型如圖2所示。
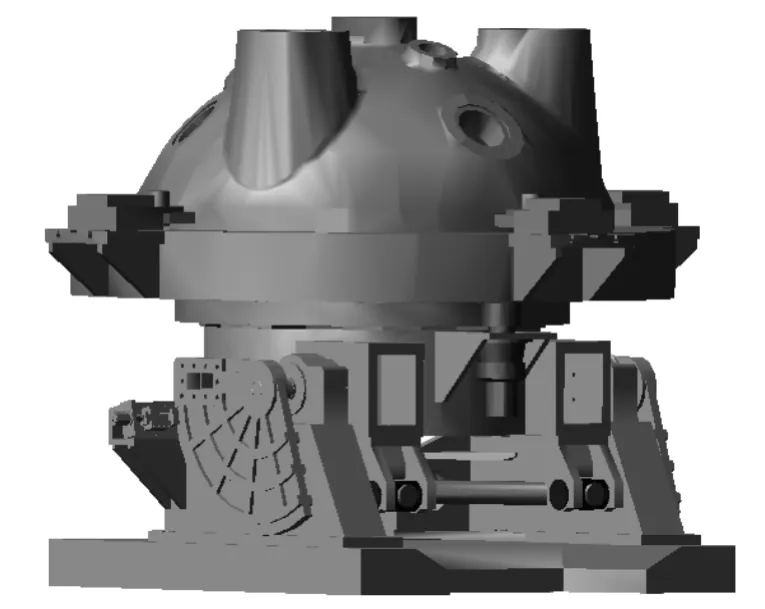
圖2 變位機ADAMS 模型Fig.2 ADAMS model of positioner
在底座與大地之間建立固定副,將變位機的底座固定;在翻轉驅動部件和翻轉驅動絲杠之間添加一個轉動副;絲杠螺母機構之間建立一個螺距為8 mm 的旋副,同時定義一個與螺旋副同方向的圓柱副;變位機旋轉工作臺旋轉驅動部件和旋轉部件之間添加一個齒輪副;為了使模型更接近現實,在運動副上施加一定的摩擦力。
3 變位機翻轉運動仿真
設定ADAMS/View 中的參數如下:翻轉驅動電機轉速12 r/min;旋轉驅動電機轉速0 r/min;仿真時間1580 s;系統中引入重力加速度。仿真得到變位機翻轉角速度隨時間的變化曲線如圖3a 所示。
給定變位機結構參數,在Matlab 中編程計算得到翻轉角速度變化曲線如圖3b 所示。
從圖3 可以看出,計算所得的變位機翻轉角速度曲線與仿真所得的翻轉角速度的變化曲線幾乎一致,這說明建立的仿真模型是準確的。
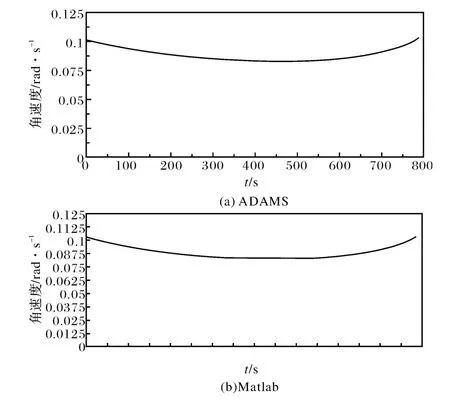
圖3 變位機翻轉角速度隨時間的變化曲線Fig.3 Turnover angular velocity versus time curve of positioner
根據變位機翻轉運動中的位置和絲桿所受軸向力的方向,將絲杠螺母機構的受力狀態分為四種情況:分別是變位機翻起絲桿受拉階段、變位機翻起絲桿受壓階段、變位機回位運動中絲桿受壓階段和變位機回位運動中絲桿受拉階段。
分析計算四種情況下絲杠的效率,由于變位機的各個關節所加的摩擦力轉化到驅動電機沿電機軸向的力矩是線性疊加的關系,可以把計算出來的絲杠效率疊加到旋轉電機的輸出扭矩上,得到如圖4 所示的翻轉驅動旋轉電機的輸出力矩曲線,通過曲線上所標出的電機最大輸出力矩,用于指導選擇翻轉驅動電機。
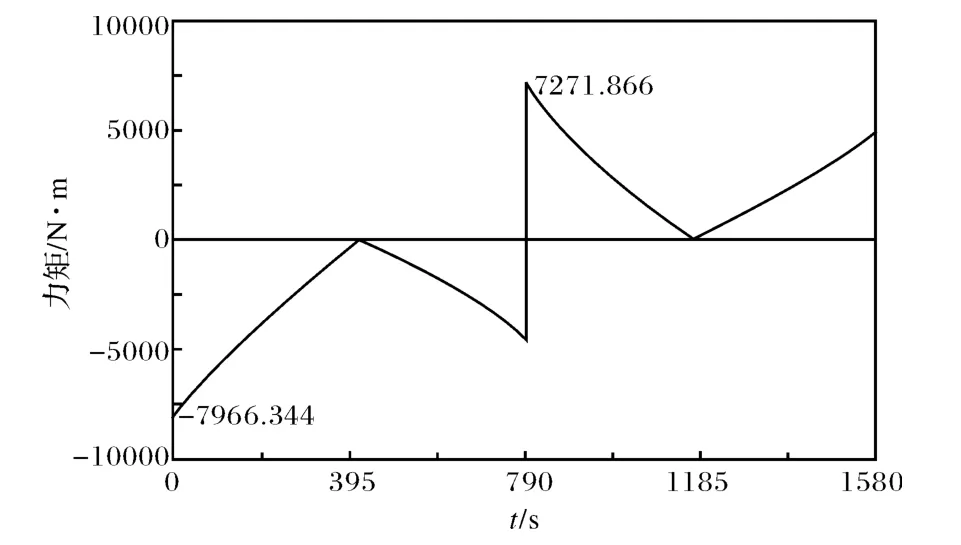
圖4 變位機翻轉運動驅動電機扭矩曲線Fig.4 Drive motor torque curve during positioner rotation
4 變位機旋轉運動仿真分析
變位機的運動過程:變位機的旋轉工作臺在翻轉70°位置,工作臺恒速旋轉一周。在實際的工作情況下,在電機減速器之間、齒輪之間和轉盤軸承的滾動體與內外圈之間存在摩擦力。因此,需要在電機減速器和轉盤軸承定義的兩個轉動副處定義摩擦力。
轉盤軸承的摩擦系數在0.01~0.015 之間,啟動時為0.015,正常運轉時為0.01。本文給出了啟動(實線)和正常運轉(虛線)條件下的結果如圖5 所示,兩條曲線其差值超過4000 N·m。(取直齒輪的傳動效率為0.95)。
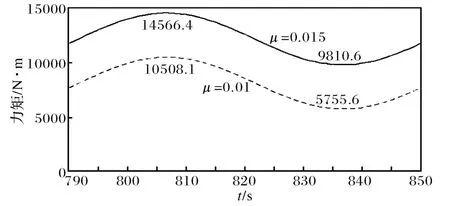
圖5 考慮摩擦力時在70°位置旋轉一周電機輸出力矩曲線Fig.5 Output torque curve of motor at 70°position with friction for each rotation
轉盤軸承的摩擦系數取0.015 時,工作臺旋轉360°過程中電機的最大功率為14.5 kW,此時電機的輸出轉速為10 r/min,如果轉速提高則電機的功率會相應的成比例提高。
5 變位機切削運動仿真分析
在銑削過程中假設刀具的運動軌跡為圓,運動一周的時間為60 s。將切削力[3]簡化到如圖6所示的坐標系的原點,以時間為變量表示的切削力在三個方向上的分量為:
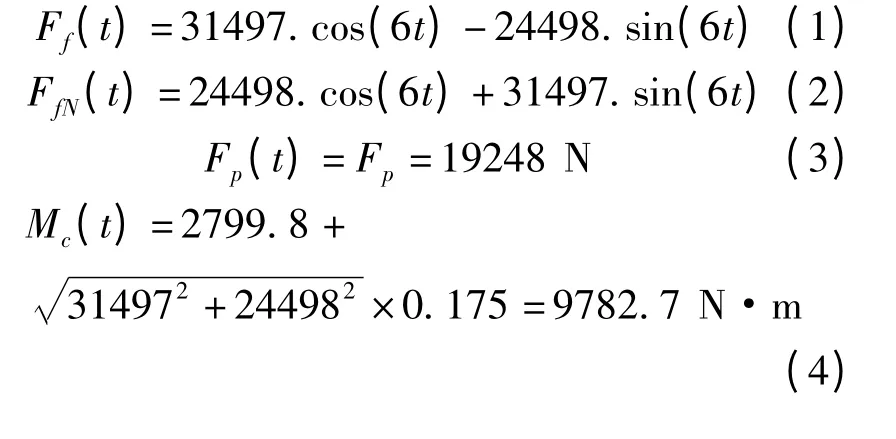
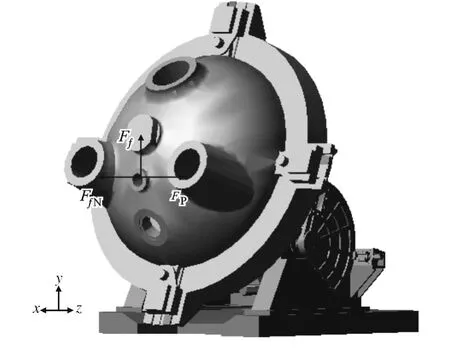
圖6 切削力加載示意圖ig.6 Loading cutting force model in ADAMS
在圖7 所示的位置加載切削力,為了平衡工件的重力和切削力對變位機的影響,需要測量相應的翻轉鎖緊力矩和旋轉鎖緊力矩。設定仿真時間為120 s,變位機的鎖緊力矩變化曲線如圖7所示。其中,最大翻轉鎖緊力矩為1.03E +006 N·m,最大旋轉鎖緊力矩為47945 N·m。該翻轉鎖緊力矩和旋轉鎖緊力矩可以作為設計鎖緊裝置的參考標準,從而縮短設計周期。
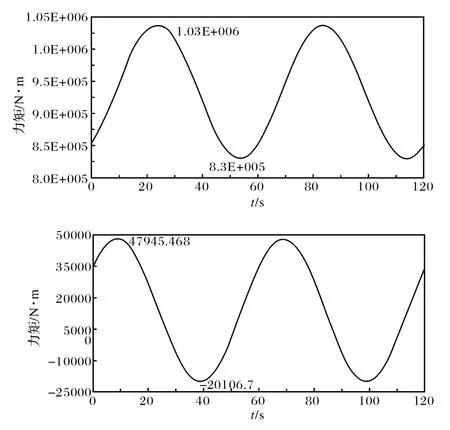
圖7 切削加工仿真測得鎖緊力矩曲線Fig.7 Locking torque curve during machining simulation
6 結論
通過ADAMS 動力學仿真分析,確定了變位機翻轉驅動電機的驅動扭矩,及切削加工過程中鎖緊裝置需要施加的鎖緊力矩,該結果可以很好地指導變位機幾何結構的設計。在變位機設計初期,充分利用虛擬樣機運動仿真技術,能夠極大地提高對變位機設計中可能存在問題(例如干涉問題)的預見性,從而更加科學、合理、快速地完成設計工作。
[1]唐艷華,趙云峰,祁榮先,等.變位機用轉盤軸承的載荷分析與仿真[J].機械設計,2011,28(5):10-14.
[2]Yanhua Tang,Yongsheng Zhao.Mechanism Design of a Two DOF Heavy Positioner and Turns-over Structure.Applied Mechanics and Materials[J].2013,271(1):1017-1021 .
[3]唐艷華,趙永生.變位機用轉盤軸承的諧響應分析[J].機械設計與制造,2013(7):175-177.
[4]蘇玉珍,鄒明山,李平.基于ADAMS 的某拼接式熨平板振動特性仿真分析.機床與液壓,2014,42(13):157-161.
[5]陳樂生,王以倫.多剛體動力學基礎[M].哈爾濱:哈爾濱工程大學出版社,1995.
[6]陳立平,張云清.機械系統動力學分析及ADAMS應用教程[M].北京:清華大學出版社,2005.
[7]林義忠,歐爽翔.六自由度焊接機器人本體結構設計及動力學仿真[J].機械設計與制造,2014(6):21-27.
[8]周杰,馬吉勝,孫中興,等.某型兵器發射塔架擺桿系統機液耦合動力學仿真研究[J].機床與液壓,2014,42(7):141-147.