電動汽車傳動系統的匹配及優化探析
2015-04-12 09:21:28余立剛
時代農機 2015年12期
關鍵詞:汽車
余立剛
(湖北職業技術學院 機電工程學院,湖北 孝感 432000)
1 電機參數的選擇及匹配
1.1 額定功率
電機額定功率屬于一種工作狀態,即電機可以長期連續性的高效作業。本文以P指代額定功率,具體表達式如下所示:

其中,ηT表示傳動機械效率;m表示車的整體質量,單位為kg;g表示重力加速度,單位為m/s2;f表示滾動阻力系數;CX表示空氣阻力系數;S表示迎風面積,單位m2;α 表示縱向坡度角,單位為°;u表示巡航車速,單位為km/h。
1.2 峰值功率
爬坡工況以及加速工況下,電動汽車的整體工作性能便是電極的峰值功率,峰值功率與車動力性呈現正比關系,不過,峰值功率越大,電池需求容量越高。所以,在選擇峰值功率時,要對汽車整體因素進行全面考慮。設峰值功率為P1,汽車特定時刻行駛速度設為u1,加速性能下計算公式如下:

其中,δ 表示汽車旋轉的質量系數。
電機處于額定轉速狀態時,轉矩最大值(Rmax)的輸出能力會直接影響汽車爬坡性能,因此,假設額定轉速狀態中,汽車的恒定車速為u2,坡度角最大值為α1,則爬坡性能下計算公式如下所示:

1.3 擴大恒功率區系數
電機額定轉速不僅會給峰值功率造成一定的影響,在某種程度上來說,其還決定了汽車整體動力性能。假設擴大恒功率區的系數為Q=hmax/h,特定時刻的行駛速度為u3,靜止加速至u3的時間設為t,具體表示式如下:

參考點擊特性可得,電機峰值轉矩的最大值T:

在上式中代入Q=hmax/h,結果如下:

由上述所得三個公式可知,電機額定轉速值越小,Q值越大,峰值功率與動力電池需求功率越小,可以有效降低汽車的整體成本與質量。不過,額定轉速功率降低,會在一定程度上影響汽車的整體動力性能。而電機額定轉速值越大,Q越小,汽車額定轉速周邊的動力性能越好,不過,與此同時,峰值功率將會大幅度上漲,汽車整體電池需求功率也會上漲。
2 傳動系統參數的匹配
電動汽車的傳統系統的參數主要有五個:峰值轉矩;最高轉速;額定轉速;峰值功率;額定功率。在對這些參數進行匹配時,不僅要結合汽車整體在動力性能方面的需求,還要對汽車整體質量進行嚴格掌控,確保其質量實現最小化,從而節約汽車整體造價,提高其市場效益、服務效益以及經濟效益。合理化匹配電機參數,需要對多個目標進行有效優化,并基于汽車整體動力性能的約束,對已知參數進行有機結合,從而獲取其余參數。
代入公式(2)中u1的最大值,假設所需功率為P3,并以P4替代公式(3)中,爬坡性能下的峰值功率,由此可得,電機峰值功率表達式:

繼而可得,電機最大車速與轉速最大值之間的關系,并獲取轉速最大值,具體公式如下:

其中,i0表示主減速比;ig表示變速器傳動比;rd表示驅動輪半徑。繼而將所得參數代入公式(6),便可獲取峰值轉矩。
3 傳動系統的優化
3.1 構建目標函數
汽車的能量耗損程度越小,其行駛里程越長,性能越好,市場效益、服務效益以及經濟效益越高。因此,本次實驗,將汽車的能量耗損程度與行駛里程作為目標函數,由于本文目標函數的構建方法為懲罰函數法,需要求解目標函數的極小點,因此,需要對汽車行駛里程進行負數化處理。目標函數的具體表達式如下所示:

3.2 構建約束條件
本次實驗的約束條件主要有三個:傳動比分配、行駛里程以及動力性能。其中,動力性能約束主要含有行駛車速最大值、爬坡性能以及加速性能。普遍而言,只要汽車的爬坡性能、加速性能與設計需求相符,則行駛車速的最大值必將負荷設計需求。因此,約束汽車爬坡性能、加速度時間即可。具體約束公式如下所示:



其中,ff表示的是滾動阻力;fw表示的是空氣阻力;ft表示的是驅動力;而δ 表示的是旋轉質量的換算系數。
汽車行駛里程約束主要包含工況狀態下行駛里程、等速行駛狀態下行駛里程。具體表達式如下所示:


其中,W1表示的是電池總能量;b表示的是各個工況下,汽車行駛距離,單位為km。






利用遺傳算法對傳統系統速比進行優化可得如下適應度函數:

其中,覣表示罰因子,值域為(0,+∞)。
最終優化結果如表1所示。
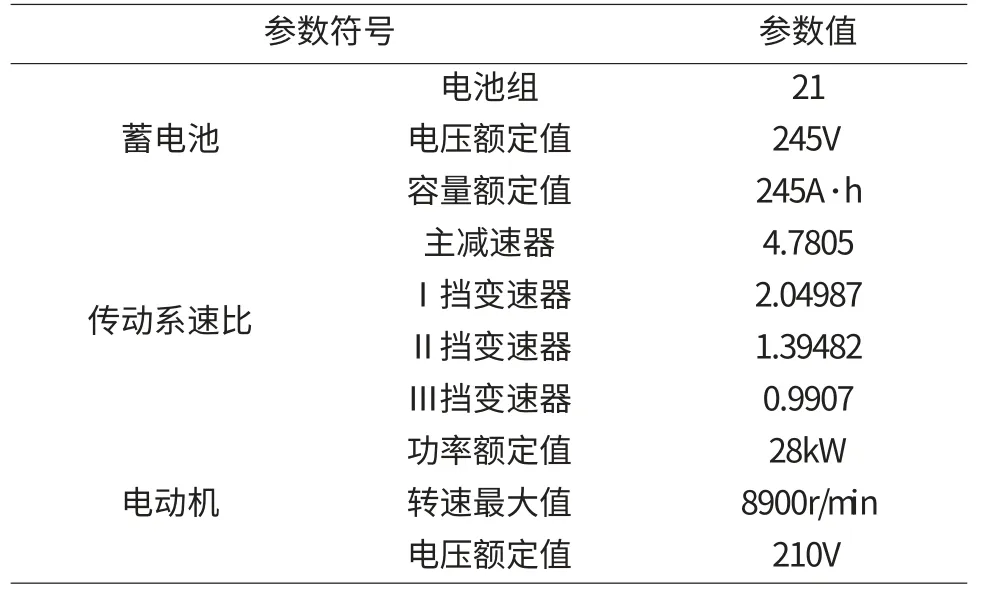
表1 傳統系統優化表
4 結語
本文以汽車動力性能為切入點,對其傳動系統參數的選擇方法以及匹配方式、具體流程進行了深入分析,并提出了一系列優化策略,以減輕電動汽車整體質量、節約造價成本、提高電動汽車的整體能效。同時,期望能為我國相關人員提供有價值的參考資料,提高相關人員的電動汽車設計水平,推進電動汽車發展。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50