GNSS 信號模擬器通道群時延標定方法
2015-04-13 02:47:00李世光寇艷紅楊軍王偉
北京航空航天大學學報 2015年12期
李世光,寇艷紅 ,楊軍,王偉
(1.中國航天科工集團第二研究院 計量與校準技術國防科技重點實驗室,北京100039;2.北京航空航天大學 電子信息工程學院,北京100191)
全球導航衛星系統(Global Navigation Satellite System,GNSS)信號模擬器(簡稱模擬器)是一種高精度的標準信號源,可以逼真地模擬生成實際環境中導航衛星發射并經空間傳播到達接收機的信號,是導航接收機研發生產中的關鍵測試設備.作為測試接收機的標準信號源,模擬器自身各項技術指標的校準十分重要.
理想情況下,在任一仿真接收歷元時刻模擬器射頻端口輸出導航信號的碼相位所對應偽距值應與模擬器所提供的該歷元時刻的偽距記錄值保持嚴格一致,兩者之間的差值即為模擬器通道群時延.模擬器通道群時延是模擬器最重要的指標之一,目前關于模擬器通道群時延的標定方法尚未形成統一標準,甚至還存在較大爭議.文獻[1-2]給出了一種利用高速示波器觀測導航信號時域相位翻轉點的方法,將翻轉點與模擬器輸出秒脈沖(One Pulse Per Second,1 PPS)信號上升沿間的時延作為模擬器通道群時延標定值.為了消除人眼判斷相位翻轉點的主觀誤差,文獻[3]利用示波器的波形分析函數對導航信號進行平方運算和低通濾波得到翻轉點附近的包絡,取包絡幅值的最小值為相位翻轉點.文獻[4]對翻轉點附近波形進行采樣并取平方后,用40 階多項式擬合出翻轉點附近的包絡,取包絡最小值得到相位翻轉點.文獻[5-7]利用導航信號的相關域特性,將采集到的信號與本地偽碼信號進行相關處理,找到相關峰相對于1 PPS 上升沿的時延,進而計算出模擬器的通道群時延.以下將文獻[1-4]的方法稱為翻轉點法,將文獻[5-7]的方法稱為相關峰法.
文獻[8]指出,翻轉點法受導航信號體制的限制,且相位翻轉點只是信號中的某個局部特征點,對于寬帶導航信號,在通道傳輸特性非理想的情況下,它相對參考基準點的時延并不足以反映整個通道的群時延特性,因此不能簡單地將其作為通道群時延的測量值.文獻[9]分析了信號的相關峰時延與通道群時延間的關系,認為非理想的模擬器通道特性將導致相關曲線的非對稱性,使得接收機延遲鎖定環(Delay Locked Loop,DLL)的即時(punctual)支路鎖定點與相關曲線的峰值點之間存在偏差.由于接收機是通過DLL 環對導航信號做閉環跟蹤,對模擬器通道群時延的標定最終是為了消除接收機測得偽距值中包含的偏差,因此通過相關峰最大值位置測得的模擬器通道群時延值仍有可能存在一定偏差.
本文在討論傳統的翻轉點法和相關峰法測量原理的基礎上,提出一種基于閉環偽距測量的模擬器通道群時延標定方法,著重探討正常信號仿真場景下閉環偽距測量法標定模擬器通道群時延的性能;設計實現了模擬器群時延標定系統,并使用3 種方法對兩種商用模擬器的通道群時延分別進行了測量,實驗結果表明閉環偽距測量法有效可行.
1 模擬器通道群時延傳統測量方法
模擬器通常應提供上升沿與所仿真基準系統時的整秒時刻保持嚴格一致的1 PPS 信號供測試同步之用.這就意味著可以在1 PPS 信號上升沿測得模擬器輸出射頻導航信號的碼相位,將其對應偽距值與模擬器所記錄該仿真歷元時刻的偽距值求差,從而得到模擬器通道群時延標定值.
1.1 時域翻轉點法
導航信號的碼相位對應著信號的發射時刻[10].當模擬器輸出零偽距特殊仿真場景的射頻導航信號且關閉各項誤差源時,若模擬器通道群時延為零,則任一歷元時刻信號的傳播時間為零,即模擬器的1 PPS 上升沿和導航信號中偽碼序列的起始位置應嚴格對齊.實際信號中,由于模擬器通道群時延的存在,偽碼序列起始位置和1 PPS上升沿之間存在時差,傳統的時域翻轉點法通過測量該時差作為模擬器通道群時延的標定值.以雙相相移鍵控(Binary Phase Shift Keying,BPSK)調制的導航信號為例,其信號表達式為

式中:A 為信號幅度;D(t)為導航電文;c(t)為偽隨機碼;fc為載波頻率;φ0為載波初相.為簡化分析,假設A=1,D(t)≡1.可見,當兩個相鄰的偽碼碼片符號相反時,載波相位會在其交界處跳變180°,這個跳變點稱為信號的相位翻轉點,對應著偽碼序列的碼片起始,即碼片內相位為零處.由于信號通道中濾波器有限帶寬的限制,翻轉點附近的時域波形如圖1 所示,圖中的包絡零點即為相位翻轉點[11],而包絡幅值的過沖現象則是吉布斯效應的體現.
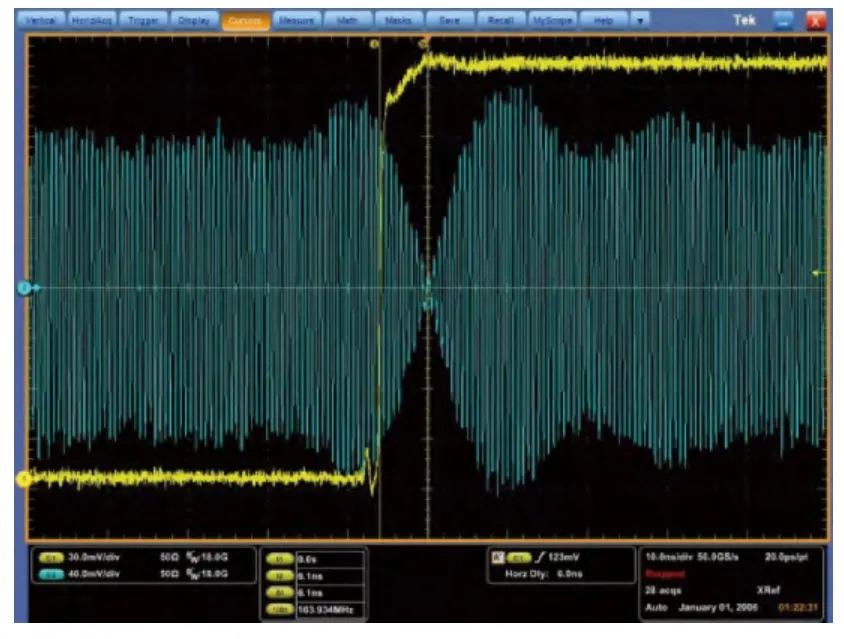
圖1 相位翻轉點的時域波形Fig.1 Time domain waveform at phase transition point
文獻[1-4]將零偽距場景下的模擬器射頻導航信號輸出和1PPS 輸出分別接入高速示波器的兩個通道,使用不同方法測量翻轉點的位置和1PPS 上升沿之間的時差,得到模擬器通道群時延的標定值.
正如文獻[8]所指出的,翻轉點法只利用了信號中局部特征點的信息,在通道特性非理想的情況下,其時延不足以反映整個通道的群時延特性,因而只適用于窄帶信號;且翻轉點位置的測量精度對示波器的采樣率提出了很高要求.另外,當所模擬的通道發射帶寬較寬時,信號時域波形的相位翻轉點將不明顯,翻轉點位置的估計精度會隨之下降甚至無法測量.
1.2 相關峰法
與翻轉點法通過時域波形判斷偽碼序列的起始位置不同,相關峰法利用導航信號的相關域特性對信號進行相關接收,從而找到相關峰相對于1 PPS 上升沿的時延.對式(1)中的信號做相關接收,則經載波剝離和積分清除后的相關幅值P 如式(2)所示[12]:

式中:R(τ)為偽隨機碼的自相關函數,τ 為本地偽碼與輸入待測信號偽碼的相位差;fe為本地載波與信號載波的頻率差異;Tcoh為相干積分時間.從式(2)可知,當本地偽碼與信號偽碼的相位對齊時,相關幅值P 達到最大.
目前公開文獻中報道的相關峰法仍使用高速示波器采集數據,然而并未見給出關于相關峰位置估計方法的具體描述.實際上在模擬器通道傳輸特性非理想的情況下,由于信號失真引起相關曲線左右不對稱,使得接收機DLL 環所跟蹤的碼相位點(即DLL 鎖定點)與相關峰值點之間會有一定偏差,這一鎖定點偏差的大小又與相關間距有關.因而一些文獻中所述通過尋找相關峰最大值點的方法進行通道群時延標定是有失偏頗的,通過相關峰值點得到的通道群時延標定值在用于接收機測量校準的時候仍將引起未知的偏差.
為了避免這一問題,可以采用與DLL 環類似的利用早遲相關值進行鑒相的方法測得相關器本地偽碼相位與輸入信號偽碼相位的差異,進而得到信號偽碼序列的起始位置相對于1 PPS 上升沿的時延,作為模擬器通道群時延測量值.為了保證1 PPS 上升沿的判定精度,要求采用很高的采樣率.由于示波器的存儲深度限制和初始信號碼相位捕獲誤差的存在,傳統信號跟蹤環路無法在所采集數據時長內進入鎖定狀態,可采用開環估計的方法通過早遲相關值得到輸入信號的碼相位估計值.為了區別于前述估計相關峰值點位置的測量方法,本文將這種改進的方法稱為相關域開環估計法.
2 基于閉環偽距測量的群時延標定
除了上述問題外,傳統測量方法多使用零偽距或固定偽距仿真場景下的特殊信號,而在導航接收機的測試校準中,模擬器輸出正常星座動態和用戶動態下的導航信號,這兩種場景下模擬器的通道群時延性能也會存在差異.文獻[13]指出,不同徑向動態下模擬器所產生信號的精度可能是不一樣的,模擬器產品手冊中給出的射頻信號精度指標應標明其所適用的信號動態范圍.
為了解決上述問題,本文提出一種基于閉環偽距測量的模擬器通道群時延標定方法(簡稱閉環偽距測量法),利用高速直接射頻采樣系統對正常星座動態仿真場景下的導航信號和1 PPS信號同時進行記錄,以1 PPS 信號作為同步信號,通過高精度軟件接收機的閉環跟蹤和碼偽距測量最終解算出模擬器的通道群時延.該方法適用于偽距隨時間變化的正常動態下的各種調制信號仿真場景.
導航接收機在某一觀測歷元時刻解算的信號偽距為

式中:R 為接收機與衛星之間的真實距離,可從模擬器的數學仿真記錄獲取;c 為光速;δtu為接收機鐘差;δt(s)為衛星鐘差;I 和T 分別為電離層和對流層引入的信號延時;τsim為模擬器通道群時延;τrcv為接收機通道群時延;rM為多徑誤差;n 為噪聲.標定模擬器的通道群時延時,關閉衛星鐘差、電離層對流層效應和多徑誤差,此時偽距方程(3)變為式(4):

使用高保真度高速雙通道采集存儲系統對模擬器輸出的射頻導航信號和1 PPS 信號同時進行直接采樣,導航信號不經過下變頻、濾波等處理,采集系統通道間時延偏差很小且可以通過標校進行補償,因此τrcv=0.以模擬器輸出1 PPS 信號上升沿作為軟件接收機觀測歷元時刻的同步信號,可消除接收機鐘差的影響,因此δtu=0.此時偽距方程變為

可見,軟件接收機解算的偽距ρ 和接收機與衛星之間的真實距離R 存在偏差,該偏差為模擬器通道群時延所引入,τsim可由式(6)估算:

式中:〈·〉表示取均值.
圖2 為閉環偽距測量法的實現框圖.通過外接高穩定度頻標(頻率穩定度:2 ×10-13/s)的高性能頻率綜合器(附加相位噪聲:-89 dBc@1 Hz,-114 dBc@1 kHz)產生采樣時鐘,可以消除采樣時鐘引入的額外誤差;為了消除各設備內時基準確度和穩定度差異帶來的測量誤差,模擬器和矢量信號源應保證同源.衰減器可以使1 PPS 信號的幅值匹配采集系統的輸入電平,其引入的時延可以用矢量網絡分析儀進行標定.
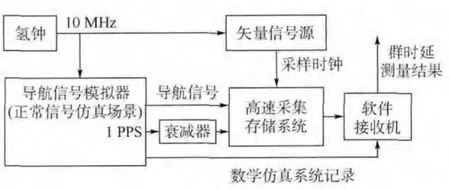
圖2 閉環偽距測量法框圖Fig.2 Block diagram of closed-loop pseudorange measurement method
為了使軟件接收機解算出信號的偽距和其對應的仿真歷元時刻,采集的信號需要完整包含導航電文的一個子幀,以GPS 為例,一個子幀長度[14]為6 s,所以采集的信號長度應不低于12 s.
軟件接收機對采集的導航信號進行捕獲跟蹤,利用載波環輔助碼環可基本消除碼環的動態應力誤差.待環路鎖定后,以1 PPS 上升沿作為碼環偽距觀測歷元時刻的同步信號,上升沿對應的模擬器仿真歷元時刻可從導航電文中的周內秒(Time of Week,TOW)獲取.由式(6)知,將接收機解算的偽距和模擬器數學仿真系統記錄的相應TOW 時刻的偽距做數據比對和統計分析,即可測得模擬器的通道群時延值.
為了保證上升沿的判定精度,應使上升沿上至少有2 個采樣點(例如若1 PPS 信號的上升時間在2 ns 內,則采樣率應不低于1 GHz),在此基礎上本文通過三次樣條內插提高上升沿的判定精度[15].圖3 為1 PPS 上升沿的采樣和內插結果,以1 PPS 高電平的50%作為觸發電平,在三次樣條內插曲線上判定上升沿的位置,可以大大提高上升沿的判定精度.
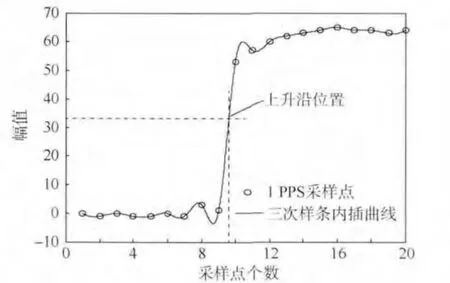
圖3 通過三次樣條內插判定1 PPS 上升沿位置Fig.3 1 PPS rising edge determination using cubic spline interpolation
3 實驗分析
使用傳統方法和閉環偽距測量法對英國Spirent 公司的GSS8000 模擬器和長沙市衛導電子科技有限公司的NSS8000 模擬器的通道群時延分別進行了標定.實驗中設置模擬器輸出GPS L1 C/A 碼信號,GSS8000 輸出導航信號的載噪比經實測為93.9 dB·Hz,NSS8000 輸出導航信號的載噪比經實測為94.3 dB·Hz.
3.1 時域翻轉點法
使用美國Tektronix 公司的DSA72004 示波器觀測相位翻轉點與1 PPS 上升沿的時延作為模擬器的通道群時延.圖4(a)為GSS8000 的單次測量結果,圖4(b)為NSS8000 的單次測量結果,對10 次觀測結果取平均,測得GSS8000 的群時延為3.08 ns,NSS8000 的群時延為6.10 ns.
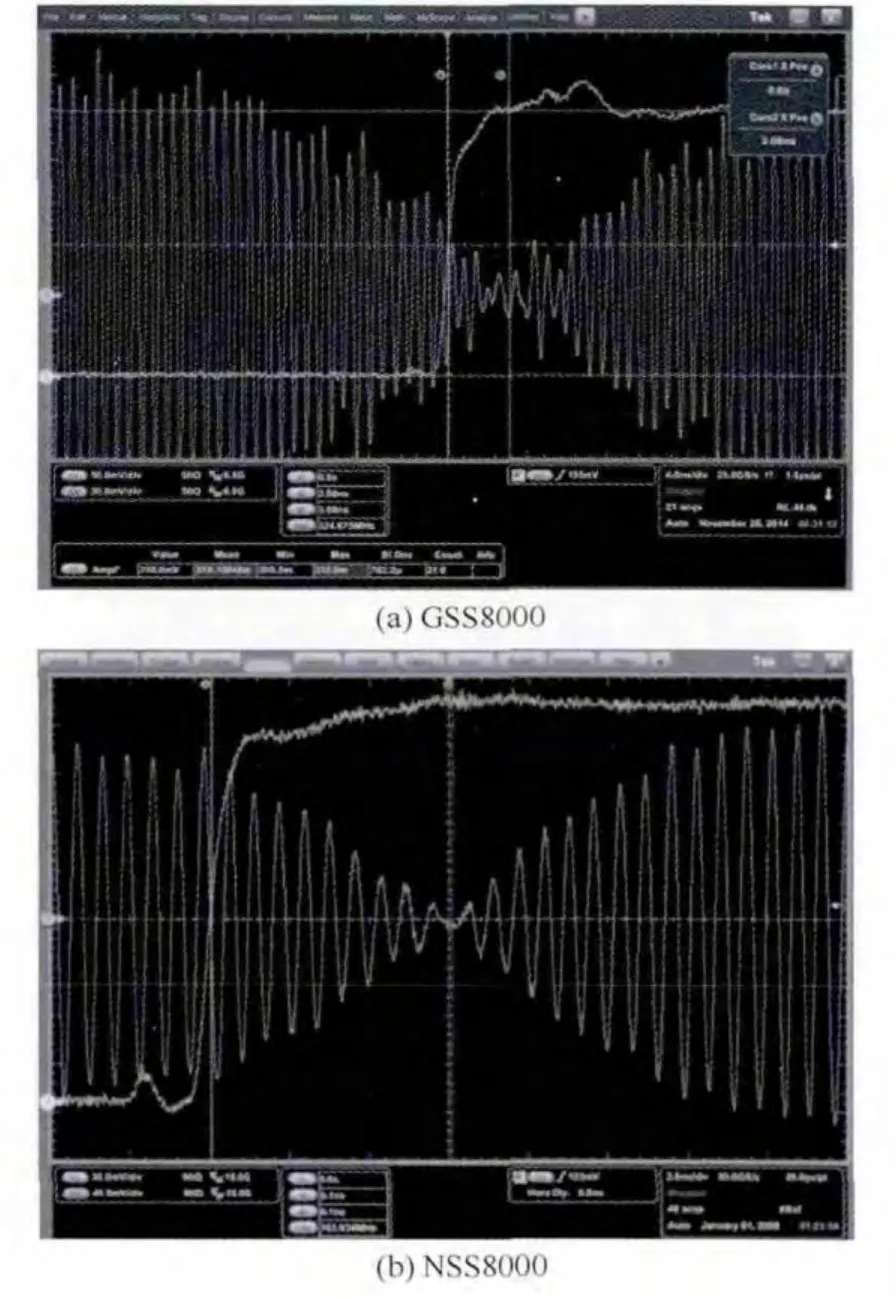
圖4 兩種模擬器群時延的時域翻轉點法測量結果Fig.4 Group delay measurement results of two simulators using time domain transition point method
3.2 相關域開環估計法
使用高速采集存儲系統采集零偽距特殊仿真場景的信號,并使用開環相關域估計法解算模擬器通道群時延.利用零偽距特殊仿真場景中信號不存在多普勒頻移的特點,設定本地載波頻率為標稱頻率,本地偽碼相位為捕獲到的偽碼相位,并使載波環和碼環保持開環;為了消除本地載波初相誤差帶來的影響,對于碼相位誤差使用非相干鑒相方法[16-17],即可測得本地偽碼相位與信號偽碼相位的差異,進而測得信號偽碼序列的起始位置,得到模擬器通道群時延測量值.數據采集時的采樣率為1 GHz,采樣分辨率為8 bit,采集的信號長度為2 s.模擬器通道群時延測量結果如圖5所示.
圖5 中每ms 輸出一個測量值,其中GSS8000的群時延和NSS8000 的群時延相差約5.5 ns,為了清晰比對二者的抖動情況,將GSS8000 的群時延測量結果向上平移了5 ns.模擬器通道群時延的統計結果如表1 所示.
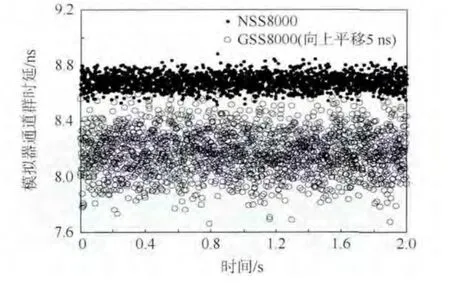
圖5 相關域開環估計法的群時延測量結果Fig.5 Group delay measurement results using correlation domain open-loop estimation method

表1 相關域開環估計法的群時延統計結果Table 1 Statistical results of group delay measurement using correlation domain open-loop estimation method
3.3 閉環偽距測量法
使用高速采集存儲系統采集正常信號仿真場景下的信號,并使用閉環偽距測量法對GSS8000和NSS8000 的群時延進行標定.數據采集時的采樣率為1 GHz,采樣分辨率為8 bit,采集的信號長度為13 s,測量結果如圖6 所示.

圖6 閉環偽距測量法的群時延結果Fig.6 Group delay measurement results using closed-loop pseudorange measurement method
實驗中軟件接收機的碼環帶寬為2.5 Hz,早遲相關器間距為一碼片,相干積分時間為1 ms,接收機每ms 輸出一個偽距觀測量.由于受被測模擬器數學仿真系統的偽距記錄更新率限制,圖6中GSS8000 的群時延測量結果每50 ms 輸出一個,并向上平移了5.5 ns,NSS8000 的群時延測量結果每10 ms 輸出一個.模擬器通道群時延的統計結果如表2 所示.

表2 閉環偽距測量法的群時延統計結果Table 2 Statistical results of group delay measurement using closed-loop pseudorange measurement method
從以上測量結果可知,對于GSS8000,閉環偽距測量法和時域翻轉點法的一致性在0.2 ns 內,而對于NSS8000,閉環偽距測量法和時域翻轉點法的結果存在約2.5 ns 的偏差;兩種模擬器群時延使用閉環偽距測量法和相關域開環估計法的測量結果均值差均在0.2 ns 內.從3 種測量方法的原理可知,在模擬器通道特性非理想的情況下,閉環偽距測量法可以真實準確測得模擬器的通道群時延,而時域翻轉點測量法的測量結果并不能真實反映模擬器的群時延值.
實際上,對模擬器通道群時延的標定最終是為了消除接收機通道群時延引入的偽距偏差,而接收機通過DLL 環對正常仿真場景下的信號做閉環跟蹤,因而利用閉環偽距測量法對模擬器的群時延進行標定,保證了信號仿真場景及測量原理和接收機群時延測量時的一致性,能夠更好地達到測量模擬器通道群時延的目的.
值得注意的是,由于不同環境溫度及相關間距下的模擬器通道群時延值可能不同,實用中應測得不同溫度及相關間距下的模擬器通道群時延值提供用戶使用.
3.4 性能分析
由閉環偽距測量法的原理知,該方法不受導航信號體制的限制,對于增加二進制偏移載波(Binary Offset Carrier,BOC)調制的寬帶信號仍然適用;該方法也不受零偽距或固定偽距仿真場景的限制,適用于偽距隨時間變化的正常信號仿真場景.
在加性高斯白噪聲(AWGN)背景下碼環閉環跟蹤可得到準最佳估計,其中相干DLL 在相關間距趨于零時碼相位估計誤差標準差可達Cramer-Rao 限,且閉環偽距測量法易于通過載波環輔助碼環來消除視距動態引起的偏差;誠然開環估計也可采用最大似然等一系列最佳估計方法,但要達到閉環跟蹤的精度其實現相對復雜.由表1和表2 的群時延統計結果可知,本次實驗中閉環偽距測量法測得結果的標準差小于相關域開環估計法,這是因為本文在開環估計法中直接利用了碼環鑒相器輸出作為估計結果,而在閉環偽距測量法中則對鑒相結果進一步利用環路濾波器抑制了噪聲的影響且通過載波環輔助碼環消除了動態應力誤差,最后通過連續的閉環調整使得環路始終工作在鑒相曲線的過零點附近.
閉環偽距測量法的測量誤差主要由1 PPS 上升沿位置的判定、熱噪聲和線纜等引入.閉環偽距測量法中的數據采樣率不低于1 GHz,因此1 PPS上升沿位置的判定誤差小于0.5 ns.熱噪聲對測量精度的影響可以通過對碼環跟蹤性能的分析得到[18-20].當早遲相關器間距為一碼片、碼環帶寬為2.5 Hz、相干積分時間為1 ms、射頻前端帶寬為20 MHz 時,碼環跟蹤誤差的標準差在不同載噪比和偽碼速率Rc下的變化情況如圖7 所示.
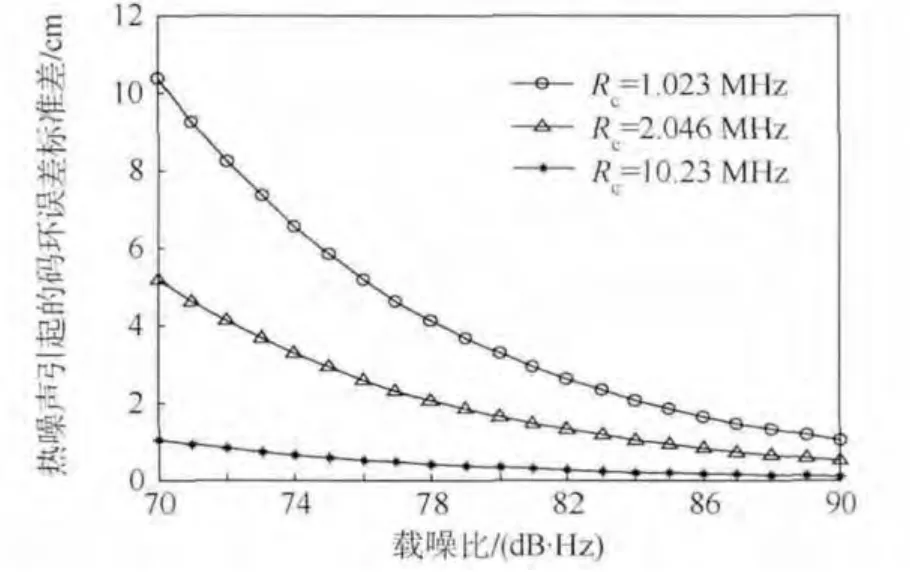
圖7 不同載噪比下的碼環跟蹤精度Fig.7 Code tracking accuracy versus carrier noise ratio
模擬器高功率口信號的載噪比可達80 dB·Hz以上[21],此時在1.023 MHz 的偽碼速率下,碼環跟蹤誤差的標準差小于4 cm,相應的碼相位測量誤差標準差小于0.15 ns.閉環偽距測量法的各項不確定度來源如表3 所示,其中線纜、連接器、衰減器引起的不確定度參照文獻[2,5].由表3 可知,合成標準不確定度優于0.7 ns.由表3可見,閉環偽距測量法的測量不確定度主要受限于1 PPS 上升沿判定的誤差.
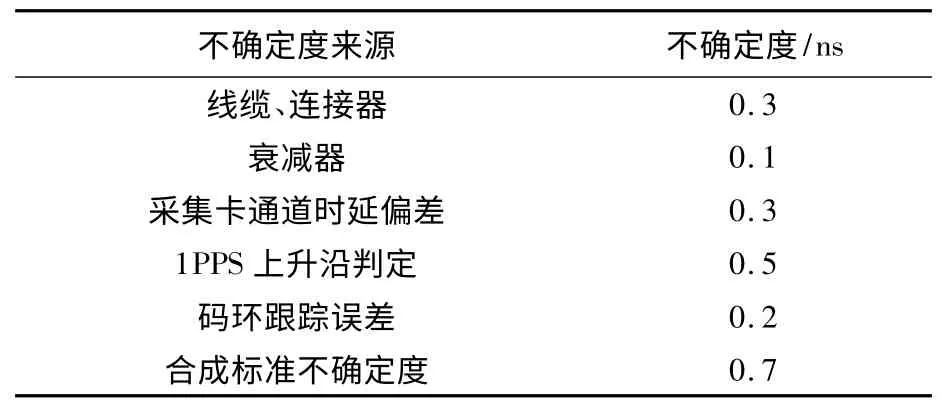
表3 模擬器群時延標定的測量不確定度Table 3 Measurement uncertainty of simulator time delay calibration
4 結 論
本文提出一種基于閉環偽距測量的模擬器通道群時延標定方法,并使用該方法對兩種商用模擬器的群時延進行了標定,對實驗結果和算法性能進行分析后,主要得到:
1)本文方法使用的信號仿真場景及測量原理與接收機通道群時延測試時一致,可以真實準確地標定非理想通道特性下的模擬器通道群時延.
2)本文方法利用碼跟蹤環的閉環高精度跟蹤,容易實現比傳統測量方法更高精度的通道群時延標定.
3)本文方法可以對真實衛星動態、用戶動態及各種導航信號體制下模擬器的通道群時延進行標定.
References)
[1] Landis G P,White J.Limitation of GPS receiver calibrations[C]∥Proceedings of 34th Annual Precise Time and Time Interval (PTTI)Meeting.Manassas,VA:ION,2002:325-332.
[2] Plumb J,Larson K M,White J,et al.Absolute calibration of a geodetic time transfer system[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2005,52(11):1904-1911.
[3] 馮富元.GPS 信號模擬源及測試技術研究和實現[D].北京:北京郵電大學,2009.
Feng F Y.GPS signal simulation source test technology research and implementation[D].Beijing:Beijing University of Posts and Telecommunications,2009(in Chinese).
[4] Boulton P,Read A,Wong R.Formal verification testing of Galileo RF constellation simulators[C]∥Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GNSS 2007).Manassas,VA:ION,2007:1564-1575.
[5] Grunert U,Thoelert S,Denks H,et al.Using of spirent GPS/Galileo HW simulator for timing receiver calibration[C]∥Position,Locationand Navigation Symposium.New York:IEEE/ION,2008:77-81.
[6] Proia A,Cibiel G.Progress report of CNES activities regarding the absolute calibration method[C]∥Proceedings of the 42th Annual Precise Time and Time Interval (PTTI)Systems and Applications Meeting.Manassas,VA:ION,2010:16-18.
[7] Proia A,Cibiel G,White J,et al.Absolute calibration of GNSS time transfer systems:NRL and CNES techniques comparison[C]∥2011 Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum(FCS).Piscataway,NJ:IEEE Press,2011:1-6.
[8] 林紅磊,牟衛華,王飛雪,等.衛星導航系統信號模擬器通道零值標定方法研究[J].導航定位學報,2013,1(4):61-64.
Lin H L,Mou W H,Wang F X,et al.Research on calibration of GNSS signal simulator[J].Journal of Navigation and Positioning,2013,1(4):61-64(in Chinese).
[9] Cartmell A.Considerations for calibration of frequency dependent delays[C]∥Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GNSS 2000).Manassas,VA:ION,2000:799-809.
[10] Parkinson B W,Spilker J J.The global positioning system:Theory and applications.Volume I[M].Reston:AIAA,1996:410.
[11] 吳海濤,李孝輝,盧曉春等.衛星導航系統時間基礎[M].北京:科學出版社,2011:147-148.
Wu H T,Li X H,Lu X C.Time base of GNSS[M].Beijing:Science Press,2011:147-148(in Chinese).
[12] Ma C,Lachapelle G,Cannon M E.Implementation of a software GPS receiver[C]∥Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GNSS 2004).Manassas,VA:ION,2004:21-24.
[13] Tetewsky A,Soltz A,Fuhry D,et al.Validating the validating tool:Defining and measuring GPS simulator specifications[C]∥Proceedings of the 10th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 1997).Manassas,VA:ION,1997:1681-1695.
[14] IS-GPS-200G.Navstar GPS space segment/navigation user interfaces[S].CA:ARINC Research Corporation,2012:74-75.
[15] 李慶揚,王能超,易大義.數值分析[M].5 版.北京:清華大學出版社,2008:41-42.
Li Q Y,Wang N C,Yi D Y.Numerical analysis[M].5th ed.Beijing:Tsinghua University Press,2008:41-42(in Chinese).
[16] 謝鋼.GPS 原理與接收機設計[M].北京:電子工業出版社,2009:71-72.
Xie G.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry,2009:71-72(in Chinese).
[17] van Dierendonck A J,Fenton P,Ford T.Theory and performance of narrow correlator spacing in a GPS receiver[J].Navigation,1992,39(3):265-283.
[18] Betz J W,Kolodziejski K R.Extended theory of early-late code tracking for a bandlimited GPS receiver[J].Navigation,2000,47(3):211-226.
[19] Kaplan E D,Hegarty C J.Understanding GPS principles and applications[M].2nd ed.Norwood,MA:Artech House,2006:173-178.
[20] Kou Y H,Sui J T,Chen Y B,et al.Test of pseudorange accuracy in GNSS RF constellation simulator[C]∥Proceedings of 25th International Technical Meeting of the Satellite Division of the Institute of Navigation 2012 (ION GNSS 2012).Manassas,VA:ION,2012:161-173.
[21] Zhang H,Kou Y H.Single-SV timing in GNSS signal simulator and receiver closed-loop testing[C]∥Proceedings of the 45th Annual Precise Time and Time Interval Systems and Applications Meeting.Manassas,VA:ION,2013:94-100.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00