飛起來才是硬道理
2015-04-14 00:39:32
航空世界 2015年11期
謝爾蓋·西科斯基曾經回憶法國飛行家費迪南德·費伯上尉在1909年對他父親伊戈爾·西科斯基所說的一句名言:“發明一種飛行機器算不得什么,制造它也并不是難事,讓它飛起來才是硬道理!”65年后,費伯上尉敏銳的觀察印證了西科斯基公司UTTAS 項目的情況。雖然設計和制造第一架UTTAS 原型機已經被認為是取得了重大成功,但在這個過程中其實并未遭遇什么大的挫折與困難。當飛行工作開始時,一切都戲劇性地改變了,讓人始料未及。正如合同中所規定的和陸軍所希望的一樣,讓UTTAS 飛起來才是最重要的。試驗—失敗—試驗再到最終的成功是這型現代直升機設計和研制過程的典型寫照,但遠不止如此。
在首次飛行后不久,UTTAS 項目就遭遇了令人沮喪的重大技術難題,技術人員無法立即找出問題的原因。當時最讓人擔心的問題是在陸軍給定的屏蔽飛行期限內不能及時地解決技術難題,這個問題在研制期間困擾了公司長達一年之久。第二個讓人困擾的問題是如果更改設計,那么設計更改造成的重量、成本和作戰性能方面的損失會影響公司提供的UTTAS 生產項目的競爭力。飛行研究階段是整個UTTAS項目研制過程中最困難的一個階段,而公司管理層和UTTAS 工作組中長期存在的競爭壓力則使情況越來越糟。
飛行研究階段與首飛前的設計和制造階段截然不同。當計劃在合同規定日期前兩個月進行首次飛行試驗后,工作組加快了工程和制造工作進度,滿足了所有重要時間節點要求,并且公司的成本/進度監控系統也顯示沒有出現問題。在地面試驗期間,直升機關鍵系統都運轉良好。1974年10月,陸軍宣布YUH-60A 原型機可以開始進行飛行試驗。當時從各方面來看項目進展得都很順利。國防部和國會對UTTAS 項目和陸軍購買1000 多架生產型直升機非常支持。公司的士氣空前高漲,當時陸軍的態度也非常積極。

1974年10月17日,在合同被授予26 個月后,UTTAS(編號21650)在西科斯基公司位于康涅狄格州斯特拉特福市的試飛場進行首飛。另外兩架原型機(編號21651 和21652)分別在1975年1月和2月進行了首飛

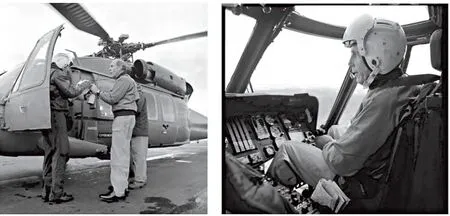
第一架YUH-60A 首飛的試飛員:迪克·賴特(左,西科斯基公司首席駕駛員)和約翰·迪克遜(右,UTTAS 項目首席試飛員)。二人承擔了整個飛行試驗和研制項目的主要飛行包線擴展和驗證試飛工作

西科斯基公司YUH-60A 首飛一個月后,波音·伏托爾公司YUH-61A 在紐約長島Calverton 的飛行試驗場進行了首飛
YUH-60A 的首飛具有特殊意義,因為這不僅是西科斯基公司許多年來為陸軍設計和制造的第一架直升機,而且比合同規定的時間提前了6周。此外,它比波音·伏托爾公司的YUH-61A 的首飛時間提前了4 周。項目的競爭環境使得一點小小的成功就被大肆宣揚。同樣地,后來不久遇到的問題的嚴重性也被渲染放大。
YUH-60A 的前兩次飛行是在西科斯基公司位于康涅狄格州斯特拉特福市的試飛場進行的,由西科斯基公司經驗豐富的飛行員迪克·賴特和約翰·迪克遜承擔試飛任務。首先進行了地面滑行,接著對懸停和低速操縱協調性和響應進行了評估。所有遙測數據都顯示結果良好,飛行員的評價也是肯定的。輿論普遍認為UTTAS飛行研究取得了良好開端。這些對前兩次飛行的樂觀情緒對公司來說是好消息,但后來的發展卻大相徑庭。
在首次飛行幾天后,飛行員被授權開始“場外”飛行,開始擴展飛行包線。YUH-60A 直升機首次的高空遠距離飛行表明:直升機工程很大程度上還只是一種藝術,而非科學。在這次飛行中,迪克遜和賴特遇到了4 個未預計到的嚴重問題。
首先,最令人不安的是在駕駛艙出現的振動過大問題,駕駛艙的振動大大超出了預計值和技術規范要求。第二大問題是高速飛行時需用功率遠遠高于計算值,這為直升機能否達到設計巡航速度/續航時間帶來了疑問。飛行員還報告說出現了令人煩惱的駕駛艙左右橫向振動,他們將它描述為不可接受的尾部擺動。除此之外,飛行員還發現當進行減速著陸操作時,YUH-60A 出現了明顯的機頭上揚。這是一個關乎飛行安全的問題,因為機頭上揚會導致在減速著陸時無法看到著陸區。在這次只有1 小時的飛行中所出現的問題后來花費了近一年半的時間才解決。這些問題給西科斯基公司對波音·伏托爾公司的YUH-61A 強有力的競爭優勢帶來了很大隱患。
伊戈爾·西科斯基曾經在對工程學學生的演講中講過:“在工作實踐中你們將不時地遇到事實與理論不相吻合的情況。在這種情況下,我衷心地勸告你們應該尊重事實。”西科斯基這一富有深遠意義的勸告也許對于UTTAS 設計小組非常適用,他們深刻地體會到了預測與事實之間的巨大差別。在1976年3月陸軍接受原型機參與競爭試驗之前,尊重事實和尋找解決問題的方法成了工程和管理人員的工作重心。
隨著對各個問題產生原因的逐步了解,工作組進行了設計更改并安裝了新硬件,但是許多重新設計都是不成功的。一些設計更改來自試驗,一些來自風洞測試,一些來自直覺猜想。每次成功的更改使得直升機逐步接近技術規范要求。通過這些更改,UTTAS 原型機逐步轉化到生產型設計,最終成為UH-60A“黑鷹”。
1976年初,在UTTAS 首次飛行近一年半后,在一架原型機上進行了最終的設計更改試飛。接著將所有3 架YUH-60A原型機修改成相同的新構型。在這一研制期間,陸軍既不鼓勵也沒有禁止設計更改,因為兩個合同商都負有構型管理的責任。陸軍人員曾對某些更改的范圍之大表示吃驚,但從未透露波音·伏托爾公司是否需要或打算進行類似的重大更改。
重大問題——振動
陸軍要求乘員艙的振動過載不得大于0.05,這幾乎只有越南戰爭期間直升機振動水平的1/4。雖然這一目標有些激進,不過從乘員的舒適性和系統的可靠性方面考慮,這一目標還是值得追求的。西科斯基公司達到0.05 的振動過載水平的方法是基于使用公司經過考驗的雙線減振器——將其安裝在旋翼槳轂的激振力源頭處。

安裝在UTTAS 旋翼槳轂頂部的最初的自調雙線減振器。4 個配重塊擺振平面內振動產生的力用以抵消旋翼槳葉產生的擺振平面內不均衡的力
雙線減振器被廣泛用在西科斯基公司的S-61 民用和軍用直升機上,其在減振方面的功效已有文獻報道。在UTTAS 設計階段,西科斯基公司認為只要采用雙線減振器就能達到振動能級,他們設想機體振動模態的固有頻率能夠完全避開旋翼激勵頻率。因此在UTTAS 首飛前的整個設計階段,雙線減振器是唯一的振動控制硬件。不過這種方法很快就被改變了。
這里給出的載荷和振動數據是1976年在UTTAS 原型機上測量得到的。由于還在不斷進行改進,此數值并不能代表生產型“黑鷹”直升機的數值。
在第三次飛行中,工作組首次意識到振動問題是一個嚴重問題。兩名飛行員都經歷了嚴重的每轉4 次(4P)振動,并且超出了設計規范一個數量級。特別是垂直方向的振動問題更為嚴重,并且水平方向的振動也超出了規范。
嚴重的駕駛艙振動是一種極度的沖擊,工作組面臨的挑戰十分清楚。為解決這一問題,公司花費了1年多的時間,不過最終在陸軍開始原型機競爭測試之前達到了可接受的振動環境。為實現減振目標,付出了增加直升機重量的代價,但幸運的是,直升機極佳的性能裕度使得這種代價是可承受的。在UTTAS 初步工程設計階段合同中,最終的減振解決方案包括抬高旋翼、加大雙線減振器、安裝4P 固定系統減振器、加強駕駛艙地板梁。每項設計改進都是在試驗數據證實其有效性后再逐步施加的。其他設計改進因無法充分證明其效益而被放棄。

UTTAS 首飛時飛行員和副駕駛位置處的駕駛艙振動,超過了規范限制一個數量級

設計更改前(低位旋翼)在早期的UTTAS 飛行試驗中3P 槳葉垂向剪切載荷非常高

用減振繩系統懸掛起來的UTTAS 靜力試驗機。施加了完整的旋翼頻率激勵,測量了駕駛艙和座艙不同位置處的響應
對問題的理解是從飛行實測槳葉作用在槳轂上的振動載荷開始的,這個振動載荷被稱為槳根剪力。設計人員發現在所有飛行速度下3P 頻率下的槳根垂直剪切載荷都比在4P 頻率下的垂直剪切載荷大得多。出現3P 振動問題在預料之中,因為旋翼槳葉一階平面彎曲固有頻率接近3P,不過在UTTAS 測得的振動量級遠遠超出了預期。還有其他因素導致這種大的槳葉3P 響應,但并沒有立即找出問題的原因。
與此同時,設計人員也獲得了旋翼飛行載荷數據。UTTAS 機體結構實驗室試驗數據解釋了為什么會出現這樣嚴重的振動問題。
振動試驗是在UTTAS 靜力試驗機上進行的,試驗機與飛行試驗機結構完全相同。通過安裝配重塊來模擬大質量部件如發動機、減速器和旋翼。整個機體組件用減振繩懸掛起來,對其施加代表旋翼激勵的激振力。

初始低位旋翼的縱向響應(G/454 千克)說明俯仰模態接近4P 激勵頻率

初始低位旋翼的橫向響應表明主減速器滾轉模態固有頻率正好為4P,這是最糟糕的情況
在振動試驗中發現某些機體彎曲模態的固有頻率比預想的更接近旋翼4P 主激勵頻率,特別是在旋翼主減速器運動時更是如此。連接主減速器的機身中段的相對撓性完全影響了主減速器模態頻率。由于座艙兩側在主減速器正下方都有用于裝艙門的開口,從而造成這部分機體結構的撓性比要求的大。除了上述開口之外,為了滿足空運緊湊性要求,座艙頂部結構相對較薄,這也進一步加劇了機身撓性。機體振動試驗確定了主減速器所有3 個主要模態(垂直、俯仰和滾轉)都非常接近4P。
由于測得的3P 垂向剪力較大,因此這些接近4P 模態的影響特別明顯。旋轉系統中的3P 垂向力感覺就像4 片槳葉旋翼中的固定系統的4P 滾轉和俯仰力矩。由于幾個主要機體模態非常接近,對YUH-60A 來說這是非常棘手的問題。這種模態的接近能夠在機體結構設計階段通過及時分析預測和及時采取措施來避免。通過結構重新設計來解調機體在工程上已不可能。不過最后還是通過一個計劃外的設計更改實現了機體的解調,即抬高旋翼的旋轉平面。
在研究機體動力學的同時,還對4P雙線減振器進行了設計更改以提高其效用。最有效的更改是把雙線減振器的臂長加長到兩倍,以便使其產生的力也翻倍。這種更改雖然有效,但還不足以提供平穩的駕駛艙/座艙環境。隨著對減振方法研究的深入,對低旋翼位置產生的滾轉的檢查開始轉向又一可能的根本原因。
旋翼位置的影響
旋翼位置問題首次出現時,并沒有立即想到利用升高UTTAS 旋翼來修正振動水平。實際上,這個方法的分析研究最初并非針對振動問題,而是為了解決UTTAS早期飛行中前飛功率超出預估值的問題而進行的。當時認為低位旋翼可能產生干擾氣流,從而增大前飛功率。這一結論雖然有些出人意料,但卻有助于搞清旋翼位置和高振動葉根剪力之間的關系。
開始并沒有把這些氣動和振動的研究聯系在一起,直到相關研究發現,機身湍流流場包含了強烈的3P 因素,這是完全沒有料想到的。當把湍流流場與旋翼上測得的高3P 槳葉垂直剪力聯系在一起時,問題才有了新的突破。利用新研發的計算機代碼分析發現,預測的機身氣流的確能導致大的振動,而升高旋翼可以在很大程度上減小振動。根據這一結果,西科斯基公司的氣動專家提出利用升高旋翼的方法來同時解決兩個問題,這些氣動專家以鮑勃·莫菲特為首,他是第一位對與旋翼位置有關的高3P 激勵做出解釋的人。其他的關鍵人物有湯姆·希伊以及約翰·馬歇爾,前者的貢獻是開發出能夠預測機身氣流流場的計算機代碼,后者則研發出了槳葉動力學代碼。
升高旋翼的想法最初聽起來很不可思議,但后來卻漸漸得到了公司高級技術工程師們的肯定,還得到了來自俄亥俄州州立大學教授兼西科斯基公司氣動顧問的赫里·漢克·維爾可夫的幫助。但是有人提出較高的旋翼位置將嚴重影響直升機被空運的能力,而空運能力明顯是陸軍優先考慮的方面。
從市場的角度看,西科斯基公司最需要考慮的問題是在本公司升高旋翼而波音公司的旋翼卻保持不變的情況下,公司的市場競爭力是否會受到影響。公司制訂的UTTAS 方案強調了低位旋翼具有極好的空運能力,而陸軍完全接受這種說法,現在看來空運能力會受到嚴重損害。為了將直升機裝進C-130 運輸機,采用高位旋翼之后就需要拆除槳葉、旋翼轂以及主減速器。拆除這些主要部件需要花費的人力以及時間遠比陸軍的規范中給定的要多得多。因此,采用高位旋翼是個艱難的決定,而且眾所周知波音公司的原型機仍采用初始的低位旋翼。另外,無法保證高位旋翼能大大減小振動問題,但卻肯定會增加直升機的重量和阻力。然而,公司不得不決定用高位旋翼進行試驗,因為沒有其他能減小振動的可行方法。
最終,兩名西科斯基公司的旋翼設計師找到了解決高位旋翼帶來的潛在空運能力問題的辦法,這無疑為進行后續試驗鋪平了道路。唐納德·弗里斯(擁有42 項發明專利)與羅伯特·雷比基(擁有18項發明專利)共同發明了一種雙位旋翼系統,能同時滿足陸軍關于空運能力的要求和減小振動。他們的這一創舉采用的是一個新的可移動裝置,稱為旋翼軸延伸器。這個延伸器在直升機飛行時可將旋翼平面升高38 厘米,但為了滿足空運要求又可將旋翼位置降低。空運時,延伸器會被拆下并放置在座艙中。當直升機從空中運輸機上卸下并準備重新飛行時,重新安裝延伸器。這是旋翼設計上的創新之舉,它讓直升機得以在規定的1.5 小時之內快速做好空運準備,但據陸軍方面驗證,延伸器的重裝需要耗費將近13 個工時,而不是規定的5 個工時。
有了這個打破空運時旋翼高度限制的解決辦法,西科斯基公司總裁格里·托拜厄斯在工程副總裁比爾·保羅建議下決定盡快利用試驗零部件在一架原型機上進行提高旋翼位置的試驗。這一決定同時也得到了聯合飛機集團公司的首席執行官哈里·格雷的批準。分析表明將旋翼高度增加38 厘米左右能顯著減小3P 激勵。然而,這項試驗必須由陸軍批準,因為這與UTTAS最初合同中的構型有很大出入,而且它還將影響直升機的總重和性能。

用螺栓連接2 個延伸器(升高了)的旋翼在原型機上正在接受早期飛行評估。旋翼軸上部中間的凸起是兩根延伸器的連接處。注意,當時UTTAS 已經安裝了全動式平尾,并已于2 個月前進行了首飛
在西科斯基公司決定進行高位旋翼原型機試飛后的幾天內,筆者向陸軍準將杰里·勞爾, 同時也是UTTAS 項目的負責人介紹了基本情況,希望軍方能批準進行此次飛行評估。他的反應是,高位旋翼的想法讓他感到意外,而且他也沒有想過這會對空運能力造成如此大的影響,但他對此持中立態度不發表明確的意見:“那是你們的設計,你們應該知道軍方最看重的是什么。”
勞爾準將對這項設計更改的反應與陸軍對所有承包方設計更改的反應基本一致,在研制階段,陸軍關于構型管理方面的態度一向是給予承包方充分的自由做出一些關鍵的設計決策,這些決策可能決定他們在UTTAS 項目競爭中的成敗。陸軍不愿意在決策中起任何作用,因此,他們對高位旋翼的想法不置可否。由查理·克勞福德負責的陸軍飛行標準部研究了西科斯基公司的設計方法并制定了飛行前疲勞試驗和功能性要求以保證飛行安全。
西科斯基公司很快利用另一個項目中剩余的鈦合金鍛件制造出了旋翼軸延伸器,試驗件的疲勞強度通過向零件施加百萬次過應力循環來驗證,這也是陸軍的飛行前要求之一。試驗用延伸器由兩根帶凸緣的軸組成,這兩根軸是以現有的手工鍛件通過機械加工得到的,然后通過螺栓連接,從而將旋翼升高38 厘米。由于試驗的緊迫性,只能使用現有的材料進行制造而不是推遲試驗等待得到尺寸精確的新鍛件。公司相信能獲得成功,并立即訂購了足以制造3 架原型機以及1 架地面試驗機的整體鍛件。

生產型“黑鷹”旋翼延伸器的正常位置。空運時,把這一部分拆除,并斷開4 根操縱拉桿,從而降低旋翼高度。拆下的延伸器放置于座艙內,但折疊的槳葉以及降低的旋翼轂還保留在直升機上

氣流偏轉向上進入旋翼,引起槳葉迎角大幅改變,這增大了3P 槳根剪力
就在美國陸軍剛批準安裝延伸器的直升機飛行的幾分鐘后,第一架安裝了延伸器的改型機于 1975年5月17日首飛。起飛后不久,飛行員就報告說直升機的4P振動水平顯著減小,與預測相符。
振動的減小令人欣喜,但是尚未達到規范要求。然而,這時升高的旋翼成了整個振動改進項目的重中之重。西科斯基公司在全部3 架原型機上都安裝了這種新的旋翼系統。最初關于空運能力會受影響的問題通過這個創新設計得到了很好的解決。

初始低位置旋翼UTTAS 機身對槳葉迎角的影響分布
低位旋翼會產生較劇烈振動的原因有:一是受從駕駛艙流入槳盤的上升氣流的影響,二是與主減速器/機身彎曲模態固有頻率有關。高位旋翼是最初減振工作的關鍵,它能在減小旋翼激勵的同時改變主減速器滾轉和俯仰模態。
這種局部氣流特別是從機頭流入的局部氣流會顯著改變槳葉局部迎角。研究表明,飛行速度在80 節時,這個迎角在30%槳葉半徑外大約改變6 度。
分析表明,如果增加從旋翼到座艙蓋頂部的距離,3P 垂直剪力會減小。如果3P 槳根垂直剪力減小,機身的實際4P 俯仰和滾轉激勵也會相應減少,這一原理促使西科斯基公司做出了試飛高位旋翼直升機的決定。
隨著槳葉作用在旋翼轂的3P 載荷的顯著減小,固定系統的4P力矩也顯著減小,也就是主減速器和機身的4P 力矩減小。除激勵較小外,機身響應會進一步減小,這是因為升高旋翼之后,主減速器俯仰和滾轉振動模態遠離了4P 激勵頻率。
在決定升高旋翼之前,為了將主減速器模態提高到4P 以上,設計人員曾經作過多種嘗試對機身調諧進行更改,如安裝部件來加強座艙結構。但是正如前面所描述的,由于艙門開口較大以及頂部結構較薄,這些加強部件沒有讓主減速器基本模態頻率顯著增加。安裝了高位旋翼之后,會降低這些頻率,使其更加遠離旋翼激勵頻率,因此,只需要對局部座艙進行下述加強,而不需要進行進一步的結構試驗。
軸延伸長度在兩種臨界模態中對固有頻率產生輕微的影響,這是很受歡迎的。

上洗流對旋翼的影響引起了槳葉迎角改變,在UTTAS 旋翼未升高時,標示出駕駛艙上方兩個區域內迎角的改變

高位旋翼能夠顯著減小槳根垂直剪力從而減小機身4P 激勵
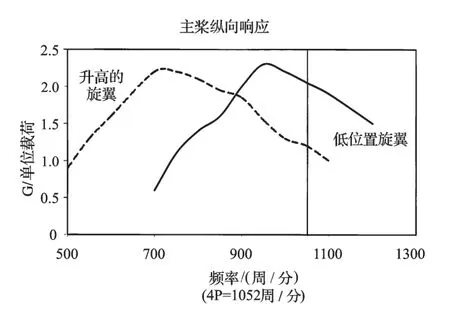
高位旋翼使主減速器俯仰模態遠離4P,這極大地減小了臨界4P 頻率時的縱向響應

使主減速器滾轉模態更加遠離4P,還能顯著減小旋翼橫向響應
固定系統減振器和駕駛艙加強
雖然高位旋翼能顯著改善振動水平,但還是高于規范要求的標準。盡管高位旋翼增加了撓性從而導致主減速器俯仰模態固有頻率遠離4P,但座艙頂部結構仍然表現出過大的響應。利用這些數據,將雙線減振器效能提高一倍的動力學工程師比爾·格溫建議安裝簡單的彈簧—質量減振器來降低仍然過大的機身響應。對機身不同安裝位置進行了評估,在座艙頂部區域有2 個4P 垂向減振器,分別位于主減速器的前方和后方。除了座艙頂部結構仍有響應之外,駕駛艙地板運動在機組成員站位上也產生了4P 問題。格溫通過增加一個駕駛艙前部減振器進行了試驗并通過加強駕駛艙地板大梁使駕駛艙結構響應進一步遠離4P。

減振器和機頭加強成為振動控制方案的一部分

座艙頂部安裝兩個4P 減振器可大幅降低座艙振動水平

高位旋翼、4P 減振器以及機頭加強的綜合效應,將駕駛艙振動水平減小到接近0.05
UTTAS 座艙前部的駕駛艙是一種懸臂梁式結構,由4 根下部縱梁從座艙后艙壁向前延伸到駕駛艙前部,目的是防止直升機墜毀時犁地。然而,這些懸臂梁會使由主減速器4P 俯仰模態激發的駕駛艙響應在某些程度上與彈簧板類似,這種響應使駕駛艙產生無法承受的垂直振動。在駕駛艙—座艙過渡段,通過在梁緣條上粘貼石墨層來加強這些梁,能有效消除彈簧板效應。
針對兩種不同的減振器配置測量了加強的駕駛艙大梁響應,第一種配置是機頭有一個減振器,但沒有座艙頂部的兩個減振器;第二種配置是機頭沒有減振器,但座艙頂部有兩個減振器。
座艙頂部減振器加上駕駛艙加強進一步顯著減小了駕駛艙機組成員站位的垂向振動。進一步的試驗證實,座艙后方頂部減振器的作用對其增加的重量來說是不值得的,因此在生產型UH-60A“黑鷹”副駕駛站位的減振組件中將其拆除。進一步試驗還證實,用石墨對縱梁進行加強的方法成本偏高,只要適當增加鋁合金縱梁的梁緣厚度就能達到相同的目的,只是重量會稍大一些。
1976年初,在預定的原型機交付日期的數周內,最終確定了減振組件。駕駛艙振動水平減小了幾乎一個數量級,接近規范中要求的0.05。不過,雖然有一個非常積極的減振計劃,但很顯然,要在整個速度范圍內使用可接受的重量代價達到0.05的目標是不可能的。能夠達到的振動水平是平均值為0.1 或略低于這個值,陸軍飛行員認為這個值是可以接受的。這個水平的振動比同時代的直升機振動水平低了一大半。受當時振動控制技術所限,也由于UTTAS 項目的資金以及時間安排的限制,沒有進行進一步的改進,0.1 的振動水平就成了UH-60A“黑鷹”生產規范的要求。
最終的改進包括升高旋翼、增大雙線減振器、采用一個座艙頂部減振器以及局部駕駛艙加強,這些都被綜合應用到了生產的第一架UH-60A 上。成功地把振動水平降低到接近起初軍方的規定值,為產品贏得了競爭力。
25年后,西科斯基公司采用了主動振動控制系統(AVCS),“黑鷹”直升機振動控制系統才又有了一個重大變化。這種全新的AVCS 是西科斯基公司為S-92直升機所研制的,后來應用到了UH-60M型號上。新技術的應用以較低的總重代價進一步減小了振動水平。
合理的尾部設計
在1939年伊戈爾·西科斯基公司找到其VS-300直升機合理的尾部設計以前,曾針對各種不同構型進行了大量試驗飛行。自那時起,直升機垂尾和平尾的設計就一直是需要最終確定的構型部分,UTTAS 項目也不例外。這表明仍然缺乏對旋翼尾流特性及其對尾面和尾槳影響的全面了解。在UTTAS 項目中,經過漫長的試驗,最后決定將最初的固定平尾改為一種可變迎角電傳操縱的穩定面。雖然這增加了機械與電子裝置的復雜性,但已證明這種穩定面具有比預期好得多的操縱品質,而且在很大程度上這種穩定面成為UH-60 具有良好飛行品質的一個重要因素。
UTTAS 尾部構型的研究始于飛行研究階段的初期。在西科斯基公司飛行試驗場外進行的首次飛行中,從進場到著陸,西科斯基公司UTTAS 項目試飛員遇到了大幅度的機頭上揚,失去了駕駛艙前方的視野。后來發現在快速減速和中斷起飛過程中這種現象更加明顯,這顯然成了安全問題。此外,當直升機重心處于最靠后位置時,飛行員難以從懸停過渡到前飛。

在不成功的試圖減弱旋翼下洗撞擊的嘗試中采用的最初的UTTAS 大面積后掠平尾

在快速停止機動中作用在固定平尾上的旋翼下洗引起大的抬頭力矩和不可接受的較高抬頭直升機姿態

安裝了S-61 的2 個小面積平尾并進行了飛行試驗,對抬頭姿態問題的解決沒有什么好處。因此在機身上布有絲線以便觀察氣流特性
原因很快就找到了,主要是旋翼尾流對平尾的撞擊,其效應通過大尺寸平尾而放大。原型機最初的平尾完全不成比例,面積達到5.57 米2,與類似尺寸的直升機相比這個面積是相當大的。從直升機有后重心位置的觀點來看,大的平尾面積是為了提供良好的前飛穩定性。這種后重心位置是有意為之,目的是通過利用斜置的尾槳升力分量,使重心處于旋翼之后,這樣就縮短了機頭與旋翼軸線之間的間距,從而滿足空運要求。另一個獨有的特征是平尾具有明顯的平面后掠,以便盡可能避免這種旋翼下洗撞擊。
原先預測后掠平尾將較平穩地置于旋翼尾流中,因此產生一種可接受的機體姿態,但事實再次證明并非如此,因而開始對“合理”的平尾進行長期研究。
在發現這個問題后的幾天內,用卸去這種平尾的直升機進行的一次飛行試驗證實了這個推測的原因,于是制定了一項計劃來確定這種平尾的面積或位置或這兩者是否是問題的所在。
在不帶平尾的飛行試驗后的數周,利用生產型S-61 的2 個平尾制造了一種小面積平尾,并安裝在再往后30 厘米處,在1974年11月23日進行了飛行試驗,但問題只有小小的改善。平尾面積仍然太大,而且后安裝位置沒有避開旋翼尾流。

Z 形尾翼有助于減輕抬頭問題,這表明低位平尾控制著姿態

Z 形尾翼的下位平尾被拆除,使抬頭姿態問題有所改善,但不利于前飛穩定性
為了評估平尾位置的影響,用相隔距離較大的尾段進行了一次試驗,也就是Z形尾翼,并在1975年2月11日進行了首次飛行。雖然問題有所改善,但對飛行員來說,抬頭姿態仍是不可接受的。在Z 形尾翼試驗后,仍然是在2月11日,公司立即進行了另一次飛行,在這次飛行中尾翼的下位平尾被拆除。這樣,平尾總面積只有原來的一半,這種上位平尾對抬頭姿態具有非常明顯的改善,但相對較小的面積不能提供足夠的前飛穩定性。

由一個支柱支撐的大面積上反角平尾,沒有完全恢復穩定性

完全可控全動式平尾的首飛在修正抬頭姿態和改善穩定性方面獲得了成功
在進行這些尾翼試驗的時候,一架直升機意想不到地訪問了位于康涅狄格州斯特拉特福德的西科斯基公司的試飛場。這是一架波音·伏托爾公司的YUH-61A 直升機原型機。它從紐約加爾維斯特的試驗場出發,橫穿長島海峽,向西科斯基公司UTTAS 小組做了一次特殊的拜訪。在與指揮塔聯系后,波音·伏托爾公司的直升機在試飛場進行了低空通場飛行,并投下一個小的包裹,然后飛離。在一個精心包裝的包裹中,有一本彩色兒童書,書名為《給驢裝上尾巴》(Pin the tail on Donkey)。波音·伏托爾公司的彩色書對西科斯基公司探索合理尾部構型的反復試驗過程是一種恰當的注釋。后來,在找到最終解決方法后,UTTAS 的首席試飛員約翰·迪克遜也駕駛一架YUH-60A 在波音·伏托爾公司加爾維斯特試驗場上空飛行。在精神斗爭方面,迪克遜利用這次機會投放了一個小包裹,作為一種友好的表示,但包內之物并沒有波音·伏托爾公司贈與的包裹那么精致。包內之物更是可以在任何地方收集到,特別是在牲廄里隨處可見。
最后的固定平尾試驗是在3月10日進行的,當時平尾采用了大面積和上反角。這個平尾用一個支柱支撐,因為其尺寸較大,飛行情況比較好,但縱向穩定性還不是完全可以接受的。
在這次為期4 個月的平尾試驗中,公司開始設計一種可變安裝角平尾,以便在不能找出固定平尾解決方法時作為一種備用構型。這種可變安裝角平尾,也稱為全動式平尾,最初只是想解決俯仰姿態問題,通過自動改變安裝角,在低速飛行中使旋翼下洗效應最小。其面積從原來的5.57 米2減小為3.72 米2,但提供了良好的縱向穩定性。在盧·科頓的領導下,全動式平尾設計逐步推進,操縱電子裝置的設計得到了雷·約翰遜與戴夫·韋爾澤拉的幫助,而機身設計得到了約翰·恰普科維奇的支持。隨著其控制系統設計的完成,這種平尾的好處越來越明顯了。特別是尾部不依賴飛行速度而產生氣動力的能力可更好地調整整個飛行包線內的操縱品質。此外,配平姿態的能力有助于增大飛行速度。在最后的分析中發現,這種平尾改善了飛行品質,以前的固定平尾是達不到這樣的飛行品質的,即使固定平尾按計劃起作用。
這種平尾的首飛在1975年3月13日進行,也就是在UTTAS 首飛后將近5 個月,這次試飛在各個方面都取得了成功。這立即成為一種基本設計,并在所有3 架原型機上進行了改裝,利用電子精準調整來獲得可能的飛行品質和巡航速度方面的益處。
這種全動式平尾設計采用了人工操控的第一代電傳操縱系統,與駕駛艙之間沒有機械操縱連接。兩個電動螺旋作動器串聯,并由兩組獨立的電子裝置控制,用于調節設定平尾安裝角。兩個作動器安裝在尾支柱結構上,共同改變平尾位置,對懸停和低速飛行來說,安裝角可高達40 度,對某些巡航和機動飛行而言,可低達-8度。此外,在高速自轉中,在完全前重心狀態,-8 度安裝角具有良好的操縱裕度。通過大幅度減小旋翼下洗力,大的抬頭安裝角在低速和懸停飛行中完全解決了直升機 姿態問題。
一旦安裝了基本的傳感器/計算機/作動器余度設備,全動平尾可變安裝角還提供了改善操縱品質的機會。總距與平尾安裝角結合用來減小向懸停過渡中的抬頭姿態,以及在低速飛行中改善機身姿態和飛行員視界。
除了空速和總距桿位置外,還有兩個輸入用來控制平尾安裝角。第三個輸入是直升機俯仰速率,幫助對總距—直升機俯仰運動進行解耦,這耦合是單旋翼直升機共有的特征。俯仰速率耦合進一步改善了直升機巡航飛行的阻尼特性,并在前飛中提供有利的機動穩定性。對平尾安裝角的第四個輸入是直升機橫向加速度。這個輸入減輕了尾槳上突風引起的直升機俯仰擾動,并且由于尾槳傾斜而產生俯仰力矩。

接近40 度的平尾抬頭安裝角在低速飛行中幾乎完全消除了旋翼下洗影響

平尾安裝角表示為指示空速和總距操縱桿位置的函數

直升機平飛俯仰姿態隨空速的變化

一次平尾評估飛行試驗之后,UTTAS 首席試飛員約翰·迪克遜(右)向西科斯基公司總裁格里·托拜厄斯(中)與作者(左)匯報情況
控制平尾的所有部件仍然是一種雙失效—安全配置,帶有兩個獨立的子系統,包括電子裝置、作動器、傳感器、故障監控器、電源以及導線。如果2 個系統之間的差大于設定值而引起自動斷開,那么,飛行員可以通過轉動駕駛艙控制面板上的開關和周期變距桿上的旋轉開關,人工控制平尾位置。這些開關旁路掉所有電子裝置,并將26 伏電源直接與作動器連接。
獲得合理的平尾設計是一個漫長的過程,完全依賴于對各種構型平尾進行的飛行試驗評估。這是一個令人沮喪的過程。不過,最后找到了一種設計方式,且目前為止各種“黑鷹”UH-60 改型直升機可不做改動就能夠采用。這種全動平尾解決方法全面提高了飛行品質,是長期以來探索UTTAS 合理平尾設計嘗試的結果。
實現“UTTAS 機動”
西科斯基公司在改進CH-53D 旋翼槳葉,采用曲面翼型之前,公司所有金屬槳葉基本上都是采用NASA0012 翼型。選擇對稱的0012 翼型是因為其俯仰力矩小,有助于減小操縱系統的載荷,因為早期槳葉大梁材料的扭轉剛度比現有的低。此外,在使用液壓伺服機構之前,手動控制飛行操縱系統時,希望俯仰力矩較小。然而,在UTTAS 時期,新一代直升機需要更好的高速飛行性能。但是,大馬赫數情況下旋翼升力能力和阻力發散成為主要問題,同時存在一些潛在的限制。在作戰中,需要迅猛地貼地飛行,因此,機動能力的提高變得越來越重要。顯而易見,為了滿足新性能指標和機動性的要求,非常需要先進的翼型。
在20 世紀60年代末期,西科斯基公司和聯合飛機研究實驗室共同研制了一種新型的曲面大升力翼型,厚度為91/2%。其特性與要求的直升機性能很匹配。這種翼型代號為SC-1095,與早期的0012 翼型相比,前者最大升力系數增加了10%~20%,阻力發散馬赫數邊界增大了4%~7%。這種新的曲面翼型的俯仰力矩很低,從而受到了設計師的青睞。CH-53D 采用了SC-1095 翼型,飛行試驗證明,直升機的性能得到了明顯改善。1971年9月,采用SC-1095 翼型、鈦合金槳葉大梁的CH-53D 進行了首次飛行,使得起飛重量達到了17236 千克,速度達到180 節。因為SC-1095 翼型完全滿足UTTAS 的性能要求,所以UTTAS 的旋翼槳葉和尾槳葉都選擇了這種翼型。
采用了SC-1095 翼型的旋翼和尾槳都表現出了很好的性能。然而,當飛行包線試圖擴大到要求的“UTTAS 機動”時,實際情況又似乎與理論相矛盾。這種特殊的機動動作是貼地障礙規避飛行,要求至少以1.75 的過載拉起,以越過障礙,并保持這種過載3 秒,然后推桿到過載0.25,恢復到先前高度。這樣做的目的是在戰斗貼地飛行期間,盡可能減少直升機暴露在地面火力中的時間。當西科斯基公司的飛行員第一次在模擬的高溫高原環境下飛這種機動動作時,他們無法保持1.75 的過載長達3 秒。
最初認為造成這種不足的原因可能是旋翼實度太小,這就意味著為了產生更大的升力,需要增加槳葉弦長。而增加弦長將會對槳葉工裝、槳葉重量和槳轂形式產生很大影響。幸運的是,經過西科斯基公司資深氣動專家們深入的研究之后,發現了升力不足的原因,隨后研究出了一個很好的解決方案,幾天后 UTTAS 槳葉就采用了這個方案,并很快進行了飛行試驗,以重新評估過載1.75 的拉起和保持機動。上述修改徹底解決了這個問題并且代表了在激烈的生存競爭下,由于人類求生本能而激發的創造能力所得到的“一流”解決方案。
UTTAS 旋翼的瞬態升力不足問題是由兩個不相關的因素引起的。第一個與在聯合飛機研究實驗室風洞里測試新型SC-1095 翼型特性的方法有關。當時測量翼型升力系數采用了二維插值法,研究人員對這種方法生成的數據是樂觀的。后來在飛行試驗中發現載荷因數不足之后,在一個新的風洞中再次進行了試驗,得出的數值很小,但是正確的,這就是這種翼型的最大升力系數。第二個因素與當時使用的分析旋翼性能的方法有關。

“黑鷹”旋翼槳葉翼型展向變化和槳葉幾何尺寸
在UTTAS 時期,西科斯基公司的氣動專家使用“定常入流”模型,但是,當升力非常大時,模型不能精確地預測槳葉的失速區域。從這個時期開始,越來越精確的“可變入流”渦流—尾跡旋翼模型表明旋翼槳葉初始的失速區在槳尖內側接近85%葉展處。這就告訴設計者們在槳尖失速區內側應采用大升力翼型,然后在某個展向位置終止這種翼型,確保在前行邊工作時壓縮性不成為問題。如果在設計UTTAS 槳葉時就已經知道這些則在槳葉外側會采用不同的翼型。通過公司優秀的氣動專家團隊的共同努力,最終得到了這種解決方案。
除了這些計算方面的不足之外,影響旋翼機動性能的另一個問題是機身廢阻。在早期的飛行試驗中,前飛需用功率大于預計的值,因為機身阻力大于早期風洞試驗的測試結果。阻力增加,則要求旋翼產生更大的推進力,在高速拉起下,翼型升力問題就更加突出。大家齊心解決減小阻力的問題已大大降低了對機動性的影響。然而,對翼型進一步優化是解決過載問題的主要途徑。
當出現機動性問題后,西科斯基公司組成工作小組尋找除調整旋翼槳葉大小以外可能的解決方案。工作小組由西科斯基公司的工程師埃文·弗拉登柏格、戴夫·克拉克、羅伯特·莫非特、鮑博·弗萊明、加里·德西蒙和公司顧問兼俄亥俄州大學航空航天專業教授赫里·漢克·維爾可夫組成。通過審查大扭轉槳葉采用的新型可變入流模型早期的結果,小組成員意識到可在槳葉一定區域采用大升力翼型,在其他區域采用SC-1095 翼型。工作小組給SC-1095 翼型設計了附加的“下垂前緣”,以產生機動飛行時所需的大升力系數。

UTTAS 合格鑒定試驗期間驗證的氣動和結構設計包線
這種附加的下垂前緣的基本形狀是模仿NACA23012 翼型的,連接在SC-1095翼型的前緣。這種新的翼型稱為SC-1094R8,設計者很快在現有的UTTAS 槳葉上加裝了用輕質木材和玻璃纖維制成的這種新翼型。在獲得有關這種新翼型的試驗數據之前就對這些改進過的槳葉進行了飛行試驗,而且首次飛行試驗證實了工作小組的預測。從那時起,“下垂前緣”成為那個槳葉段的生產型翼型。
SC-1094R8 翼型的拉起過載符合陸軍要求的3 秒內保持1.75,同時推桿機動過載為0,這好于0.25 的要求。通過這種改進設計,達到了陸軍的目標,在低空飛行時,使直升機暴露在地面火力中的時間最短。
UTTAS 最終構型的氣動和結構設計包線達到了極限俯沖速度。通過采用有適當鉸鏈偏移量的鉸接旋翼和合適的槳葉氣動設計,有效提高了過載能力。在UTTAS項目期間開發的旋翼槳葉的結構設計和氣動構型成為“黑鷹”的生產標準,一直保持了25年多。直到2001年,UH-60M 型直升機引入先進的復合材料和新研制的翼型、槳尖幾何形狀和平面形狀。
彌補速度的不足
早期的飛行測試反映出UTTAS 前飛速度嚴重不足,大約比規范低20 節。設計人員發現機身阻力比預期值高出很多,并且是隨速度增加而需要更大功率的主要原因。為解決速度不足,需要進行風洞試驗和飛行試驗。除了飛行性能問題,飛行員還反映尾部激勵較大,比在有些飛行條件下許多直升機所遇到的典型尾部擺動要糟糕得多。
幸運的是,速度和尾部擺動問題都與機身構型有關,而且,對旋翼塔座后部形狀進行較大改動能夠減小阻力并能很好地減小尾槳激勵。旋翼塔座形狀的改動使得發動機排氣口上下區域的氣流能夠更平滑地流動,這樣一來便減少了氣流的分離和湍流。由塔座附近的分離氣流造成的尾槳以及大面積尾翼面抖振在下降飛行期間的大迎角姿態時特別嚴重。

貼地障礙規避飛行要求的過載1.75 拉起并保持3 秒
正如之前所說的,西科斯基公司開發的新型全動平尾具備在不受機身姿態影響的情況下在尾部產生升力的能力。這樣便可更好地利用直升機上為解決抬頭姿態問題而配備的計算機、作動器和傳感器。因此,平尾成為尋求解決速度不足的另一個切入點,而且平尾能夠通過優化前飛時的機身姿態從而使得廢阻最小。當然,還應該在機身設計上進行更多的改進來彌補速度的不足。
這種性能問題讓人感到特別困擾,飛行員稱在大約以125 節的速度飛行時,直升機好像遇到一面看不見的墻,從遙測數據上分析,證實需要比預期大很多的功率才能夠使速度繼續增加。最初,設計人員懷疑問題是旋翼槳葉和機身的氣動設計引起的,但之后確定是機身引起的,重點是要減小阻力。將旋翼升高是為了幫助解決振動問題,但也影響到了前飛功率,只是影響不大。
在早期的研究以及再次準備方案之前,對最初的UTTAS 設計進行了1 ∶10縮比模型的風洞試驗。當時估計產生廢阻的當量面積剛超過2 米2,包括動量損失和天線產生的阻力、泄漏以及其他各種影響。這導致預計在任務總重為7031 千克、1219 米高度、35 攝氏度條件下飛行時巡航速度為150 節。在方案評審期間,陸軍估計產生阻力的當量面積大于2 米2,因此將巡航速度降低為148 節。另外,在1972年8月授予的合同中要求總重增加至7189 千克。
隨著重量的逐步增大,西科斯基公司為了保持“黑鷹”158 米/分的垂直爬升性能,將其旋翼直徑增加了10 厘米達到16.25 米。之后在飛行測試時加長了槳尖罩,旋翼直徑長度又增加了10 厘米,最終導致旋翼直徑達到16.35 米,所有生產型H-60(S-70)的旋翼直徑都沒有再改動。最后一次旋翼直徑的增加是為了補償其他所有設計改進而導致的空重增加。
在1973年進行UTTAS 詳細設計時,西科斯基公司制造了一個1 ∶4 的風洞模型來評估機身的氣動特性和穩定性。從UTC大型亞聲速風洞得到的測試數據證實了產生阻力的當量面積為陸軍所估計的2 米2。在這次試驗中,更加確認了機身姿態對廢阻有著顯著影響。特別是,起落架支柱短翼表現出非常不利的升力—阻力效應,這也成為減小阻力的機會。為此,設計人員除了改變支柱短翼安裝角外,還進行了許多能夠減小阻力的改進,其中也包括了改變形狀后的旋翼塔座。那時候,由于UTTAS原型機的結構很好,所以要避免較大的設計更改。然而,飛行測試暴露出功率問題后不久,減小阻力的改進項目表成了進行性能恢復研究的工作清單。

風洞模型
那時候至少可以這么說,速度不足是重要的問題。預測的速度范圍可高達150節,而實際的速度僅能達到120 節。根據實際性能計算的產生阻力總當量面積約為3 米2,這包含外部儀器的集電環的阻力。忽略儀器所帶來的阻力,產生廢阻的當量面積略大于2.6 米2,明顯高于先前所有的預測。由于存在這些阻力,UTTAS 的速度離要求還差約20 節。采用原有的固定平尾,以高出預計的低頭姿態前飛時會產生較大的阻力,而低位旋翼可能使得問題更加嚴重,因為從駕駛艙區域有股強烈的上升氣流吹向旋翼。雖然這股強烈的上升氣流有可能是產生阻力的部分原因,但是它更是之前討論的振動問題的罪魁禍首。當1975年5月對升高后的旋翼進行測試時,測量數據表明對旋翼性能的影響很小,但旋翼軸延伸器部件確實增加了當量阻力面積約0.09 米2。在減阻設計中必須補償這種阻力的增加。
部分風洞測試是于1975年在那個1 ∶4 的模型上進行的,關注的是改變旋翼塔座形狀、減少動量損失、優化支柱短翼安裝角,以及在早期試驗中發現的其他能夠減小阻力的方法。這些工作的大部分都集中在改變發動機排氣口之間、機身后過渡段之上的旋翼塔座的形狀上。
最終的旋翼塔座形狀和西科斯基公司的S-61 系列很相似,在那時稱之為“馬項圈”設計。旋翼塔座形狀的改變帶來了巨大的性能提升;然而,許多其他設計更改也改善了性能的不足,如:
①增加起落架支柱短翼安裝角(原型機從0 度增至7 度,生產型UH-60 從0度增加至14 度);
②將后輪承阻梁從扁平形狀改成環狀;
③給機窗和艙門滑軌增加整流罩,改變FM 方位天線的形狀,減小駕駛艙腳踏尺寸,使雙線減振配重外形流線化,改變尾減速器整流罩形狀;
④減小電子設備艙、液壓艙和飛控艙降溫冷卻氣流入口面積,將減速器的冷卻漏斗形進氣口改成屏幕口;

前3 架YUH-60A 原型機上的原始塔座形狀。這種早期的UTTAS 構型仍然采用低位旋翼

由風洞試驗最終形成的“黑鷹”旋翼塔座氣流分離器形狀
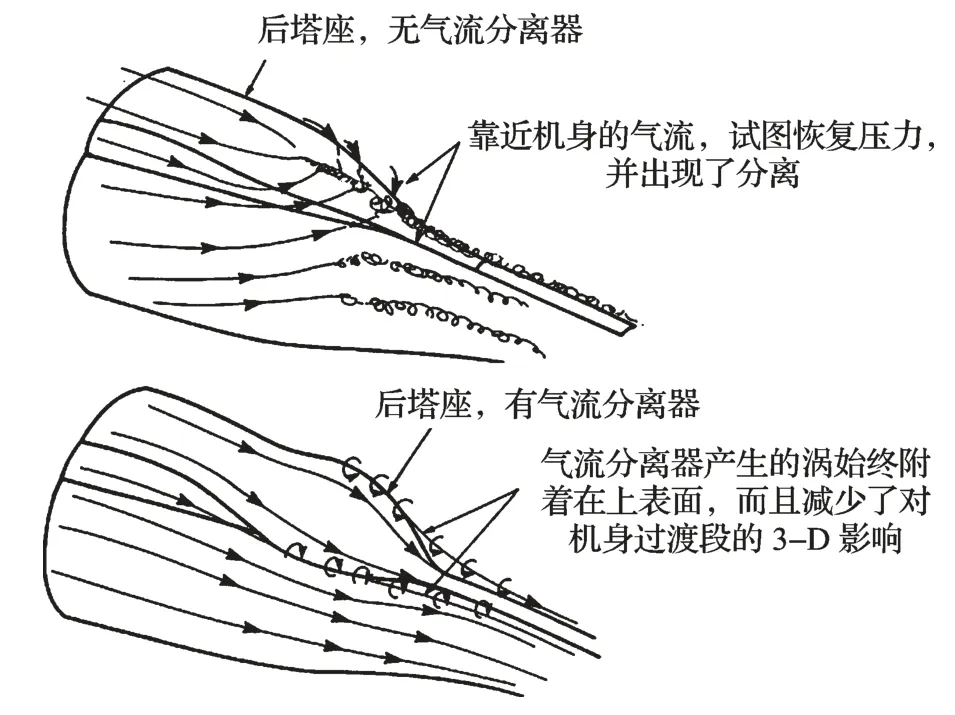
旋翼塔座重新設計之前與之后的氣流分布圖。氣流分離器明顯地減少了尾槳激勵和機身廢阻

圖中一些構型的主要改進解決了主要問題,并成為“黑鷹”構型的一部分
⑤在大的旋翼塔座上部開口處增加環形邊緣,引導氣流離開塔座區域;
⑥在滑油冷卻器鼓風機出氣口增加整流罩,引導氣流向后排出;
⑦在維護踏板上增加了一個帶彈簧的蓋子,還在機身過渡段增加了加油口蓋。
另一種恢復巡航速度的方法是增加發動機可用功率。T700-GE-700 發動機在稍大的轉速下工作時,每臺發動機功率額外增大17 千瓦。這種功率增加可以很快通過主減速器高速模塊的傳動比使轉速稍稍增大而得到利用,速度增加約1 節。這些設計更改結合在一起將產生廢阻的當量面積減小到2.4米2,而且還消除了尾部擺動。鮑勃·費萊明、迪姆·庫珀和吉姆·羅克對此工作給予特別幫助。戴維·克拉克在技術上也給予了大力支持。埃文·弗拉登柏格為氣流分離器設計及其他改進工作做出了重要貢獻。
為及時參加陸軍的飛行評估,在3 架原型機上都采用了所有的設計更改。在規定的高溫高原環境下,這種經過改進的氣動構型的YUH-60A 任務巡航速度達到了147節。這比一年前遇到那堵“看不見的墻”時提高了近20 節。
陸軍在1972年9月對西科斯基公司的方案的速度評估結果是148 節。1977年1月,陸軍對生產型“黑鷹”速度的評估是147 節。這表明了對原型機構型所做的更改幾乎完全彌補了初始較大的巡航速度不足的問題。
準備接受陸軍評審
從原型機YUH-60A 到生產型UH-60A“黑鷹”經歷了明顯的設計更改。重要設計更改包括升高了的旋翼、全動式平尾、垂尾面積減小、形狀改變后的旋翼塔座和經改進后的前滑動整流罩。
決定在將“黑鷹”交付給陸軍之前解決所有的主要問題并修改原型機是西科斯基公司的一個主要戰略思想,這為最終獲得生產合同起到了很重要的作用。1973年底任命的西科斯基公司新執行總裁格里·托拜厄斯認為公司不能將這些主要的問題推遲到生產階段再解決,而是應該在研制階段就盡可能地去解決這些問題。這使得西科斯基公司的工程師們和制造人員幾乎是日夜工作,不斷地進行設計、制造以及測試試驗硬件,直到解決方案得到驗證。
聯合技術集團公司(前身為聯合飛機集團公司)的高級管理層,在困難的飛行研制階段不斷地對UTTAS 項目進行緊密的監管。聯合技術公司執行總裁哈里·格雷特別希望能夠親自體驗在振動、飛行品質和性能方面帶來的改善。利用公司自己的S-70 他獲得了這樣的機會。為此,他對這架直升機進行了改造,使其和那3 架即將交付給陸軍進行飛行競爭試驗的原型機一樣。
格雷與所有乘坐過這架S-70 的政府人員一樣對直升機的飛行性能印象深刻,特別是在同首席UTTAS 飛行員約翰·迪克遜共同完成半滾倒轉(split-S)動作之后更是如此。
YUH-60A 在所有方面的改進程度不亞于3年前的設計工作量。西科斯基公司已經能夠滿足合同要求,YUH-60A 已做好飛行試驗準備,即將與波音·伏托爾公司的YUH-61A 競爭這份金額巨大的生產合同。
1976年3月,聯合技術公司執行總裁哈里·格雷駕駛著公司自己的帶試驗標志的S-70 直升機
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
直升機技術(2021年4期)2022-01-12 13:18:12
天天愛科學(2020年6期)2020-09-10 07:22:44
民用飛機設計與研究(2019年4期)2019-05-21 07:21:30
藝術啟蒙(2018年7期)2018-08-23 09:14:18
大飛機(2018年1期)2018-05-14 15:59:08
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
航空學報(2015年4期)2015-05-07 06:43:33