BTT導彈地形跟蹤/地形回避控制器設計方法
2015-04-19 07:46:24魏東輝水尊師
導航定位與授時 2015年2期
魏東輝,水尊師,徐 騁
(北京機電工程研究所,北京100074)
BTT導彈地形跟蹤/地形回避控制器設計方法
魏東輝,水尊師,徐 騁
(北京機電工程研究所,北京100074)
針對傾斜轉彎(BTT)導彈地形跟蹤/地形回避控制任務,在彈體坐標系下建立了導彈的動力學數學模型,將滾轉通道獨立解耦,俯仰-偏航通道耦合設計;依據H∞混合靈敏度理論,設計了俯仰-偏航通道過載控制器和滾轉通道滾轉角控制器;通過六自由度非線性仿真,驗證了設計方法的有效性。
傾斜轉彎;地形跟蹤/地形回避;H∞混合靈敏度
0 引言
巡航導彈射程遠、飛行時間長,容易被敵方防御系統探測跟蹤,進而實施攔截。超低空飛行能夠降低導彈的被探測概率,增大敵方防御系統的攔截難度,從而大幅提升導彈的突防能力。通常情況下,巡航導彈采用基于BTT的地形跟蹤/地形回避技術來實現超低空飛行。如何設計良好的地形跟蹤/地形回避控制器是該技術的關鍵之一。
1 傾斜轉彎導彈運動數學模型
1.1 問題描述
傾斜轉彎(BTT)導彈在實現地形跟蹤/地形回避(TF/TA)時存在縱側向同時機動的飛行狀態,BTT導彈側向機動是通過滾轉使主升力面迅速轉到期望平面上實現的。而滾轉角速度的存在,使導彈俯仰和偏航通道存在較強的運動學耦合、動力學耦合、氣動耦合以及控制耦合。并且,當導彈做大傾斜的轉彎,即γ>15°時,過大的傾斜角會使得縱向運動和側向運動耦合增強[1],在這種條件下,基于小偏差線化的三通道獨立建模方法已失去其合理性。針對BTT導彈的這一特點,本節通過在彈體系下建立導彈的運動模型,解決上述問題。
1.2 彈體系下導彈運動數學模型推導
1.2.1重要假設
1)將導彈抽象為質量恒定的剛體;2)忽略重力的影響(在導引律中補償),僅考慮推力和空氣動力作用;3)導彈的攻角α、側滑角 β均為小量;4)發動機推力P與彈體縱軸重合;5)忽略下洗延遲引起的附加俯仰、偏航力矩;6)將導彈的飛行速度ν視為常數。
1.2.2作用在導彈上的力和力矩
基于1.2.1中的假設,作用在導彈上的力投影到彈體系下的表達式為:

作用在彈體系三軸上的力矩表達式為:
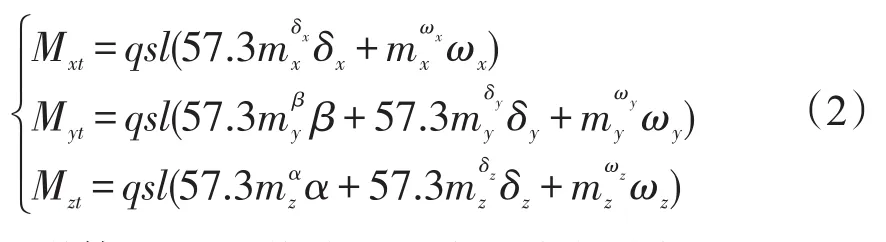
1.2.3彈體系下導彈質心運動的動力學方程
哥氏定理用于描述絕對變化率與相對變化率間的關系,選取彈體坐標系為活動坐標系,據哥氏定理有:

將式(3)展開得:
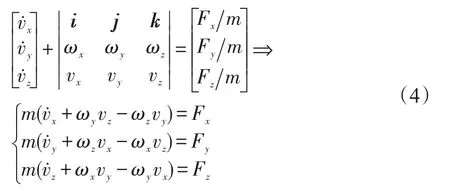
其中νχ,νy,νz是彈體系三軸上的速度分量。當α<15°,β<15°時,ν與νχ的差小于10%,故有下述近似成立:
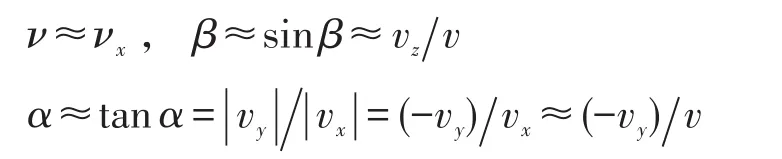
式中近似直接利用 α≈sinα≈(-vy)v對式(4)做如下變換:
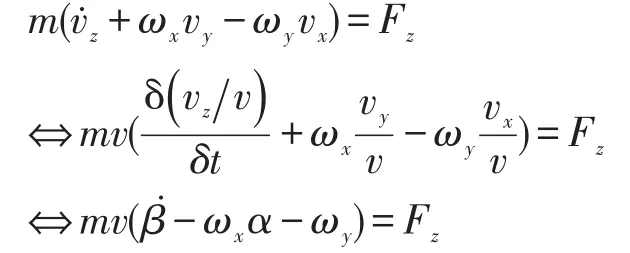
整理得

同理可得:
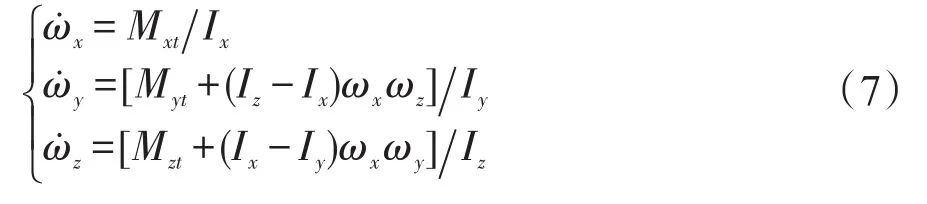
1.2.4彈體系下導彈繞質心轉動的動力學方程
因為彈體所有的慣性積為零,且Iz=Iy,展開后的方程為[2]:
1.2.5舵機模型
舵機模型用如下一階慣性環節近似

其中,δi為實際舵偏角,δic為舵偏角指令,俯仰、偏航、滾動舵均采用上述模型。
1.2.6導彈運動數學模型
將力、力矩表達式(1)、式(2)帶入式(5)~式(7),并據動力系數定義[2]化簡、整理,可得本文BTT導彈的運動數學模型如下:
1)俯仰-偏航通道:
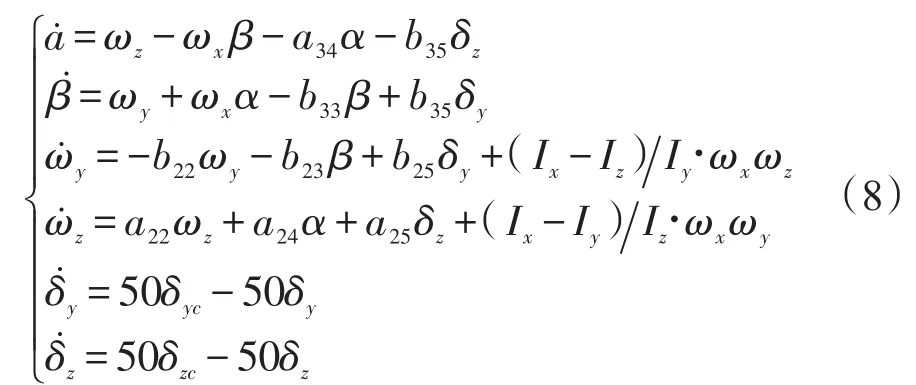
2)滾動通道:

由式(8)、式(9)可以看出,滾動通道可單獨解耦,但俯仰-偏航通道存在耦合,且耦合強度與滾轉角速度ωχ成正比。
1.2.7全狀態可測的BTT導彈運動數學模型
對于俯仰-偏航通道,要精確測量模型的狀態變量攻角α、側滑角 β是比較困難的,從控制器設計的實用性角度考慮,加速度計可以方便地測出彈體系下的縱向和側向過載nyt、nzt,因此可以用彈體系下的過載nyt和nzt來代替α和 β。將式(8)中的、、α、 β用、、nyt、nzt代替,可得俯仰-偏航通道的運動數學模型見式(10)。
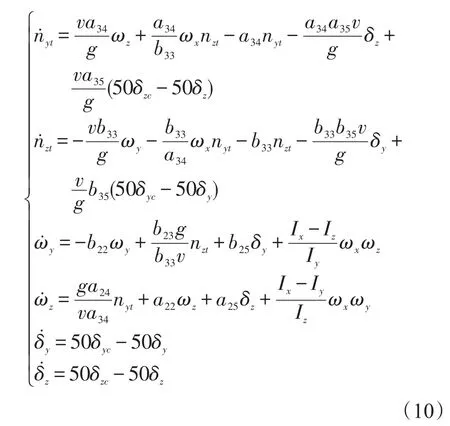
至此,由式(9)和式(10)就組成了BTT導彈全狀態可測的運動數學模型。
1.2.8 BTT導彈運動數學模型的狀態空間描述
令式(10)中ωχ為常值1,將實際飛行中ωχ的變化視為模型的不確定性,利用所設計控制器的魯棒性克服ωχ變化對閉環系統帶來的影響,利用此方法便得到了BTT導彈的線性數學模型。其狀態空間描述如下。
俯仰-偏航通道:狀態變量,輸出變量,控制量依次為:
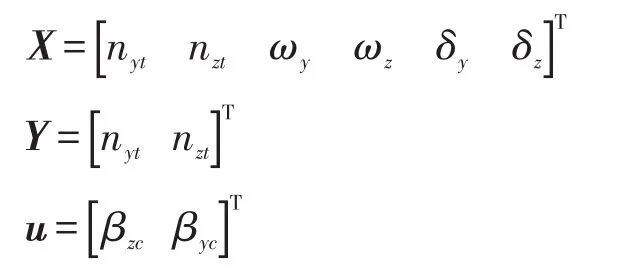
可見,俯仰-偏航通道為2入2出的多變量被控對象。
滾轉通道:狀態變量,輸出變量,控制量依
次為:X=[ωχγ δχ]T,Y=γ,u=δχc。
2 混合靈敏度魯棒控制器設計
2.1 問題描述
從上節BTT導彈的運動數學模型推導過程中可得出如下結論:導彈在進行側向機動時存在一定的滾轉角速度ωχ,從而導致俯仰-偏航通道存在較強耦合,并且耦合強度與滾轉角速度ωχ的大小成正比。因此,我們希望設計的TF/TA控制器能夠克服彈體滾轉造成的嚴重耦合對彈體控制帶來的影響,同時還希望它能克服氣動參數變化、傳感器噪聲以及干擾力、干擾力矩等不確定性因素對導彈控制帶來的影響。
魯棒控制理論能有效解決被控對象不確定性問題,本節主要針對第一節中建立的俯仰-偏航通道2入2出過載數學模型和滾動通道數學模型,應用多變量系統魯棒控制理論中的混合靈敏度設計方法,設計BTT導彈全狀態控制器。
2.2 俯仰-偏航通道過載控制器設計
2.2.1控制回路結構設計
根據已建立的數學模型,設計俯仰-偏航通道的過載控制回路結構如下圖所示:
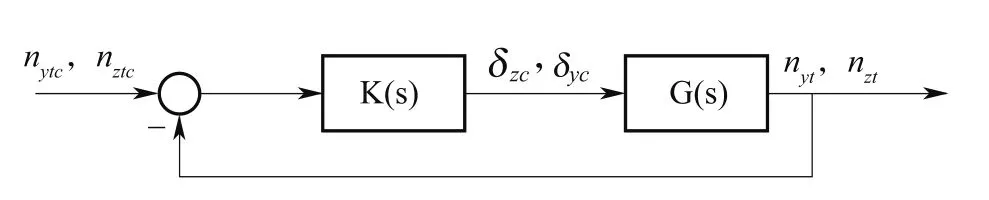
圖1 俯仰-偏航通道過載控制回路框圖Fig.1 Overload control loop structure for pitch-yaw channel
2.2.2權函數設計[3]
1)設計不確定性界函數W2(S)
補靈敏度函數T表示r到y的閉環傳遞函數,本文選擇理想的Ti為一階對角陣形式,這樣可保證在階躍指令輸入下,閉環系統的輸出無超調。設Ti=1(τs+1)I2×2,其單位階躍響應為 y(t)=1-e-t/τ,在tr時刻,期望y(tr)要達到終值的m%,由此確定慣性時間常數為τ=-tr/1n(1-m%)。
本文針對被控對象的特點,選取tr=0.6,m=90,計算得τ=0.26,再根據帶寬Wb與τ的反比關系取期望的閉環帶寬Wb=4rad/s。
首先,令W2(s)=,其中選取k2<1。其次,利用Matlab工具箱設計H∞控制器時,需滿足當 s→∞時W2(s)有界,所以要在分母上乘以τ1s+1,得
最后,通過調整參數k2、τ1以滿足W2(s)的高通濾波性以及與0dB線交叉頻率的要求。經調試,確定k2=0.6,τ1=0.0001。
2)設計性能權函數W1(s)
因為S+T=I,Ti=1(τs+1)I2×2,所以理想的靈敏 度 函 數 為 Si=s(s+1 τ)I2×2。 同 上 , 令W1(s)=,其中k1<1,其次為滿足W1(s)不同頻段的幅值要求以及與0dB線交叉頻率的要求,對W1(s)做如下修正,W1(s)=[k1(s+1 τ)](s+τ2)I2×2。經調試,確定k1=0.4,τ2=0.001。
2.2.3控制器求取
1)求取廣義被控對象P(s):由于求取H∞魯棒控制器設計的算法定義在標準H∞控制問題框架下,所以欲求得控制器需首先求出廣義被控對象P(s)[4]。
2)求解H∞控制器K(s):利用Matlab魯棒控制工具箱可以計算得到控制器K(s)。但直接利用上述方法得到的控制器為一個2×2的傳遞函數矩陣,且矩陣的每一個元素階次高達14階,由于過高的階次實現起來比較困難,所以需要對求得的控制器K(s)進行降階處理。降階處理分三步完成,首先求K(s)的最小實現Km(s),其次求Km(s)的均衡模型Kb(s),最后求出降階模型Kr(s)。
3)求K(s)的最小實現:對一個可實現的傳遞函數來說,有無窮多個狀態空間實現與其對應,其中維數最小的狀態空間實現稱為該傳遞函數的最小實現[4]。
4)基于Gram矩陣的均衡降階處理:基于Gram矩陣的均衡降階方法的理論依據和均衡實現的基本思想可參見文獻[5]。
至此,本文得到一個6階的控制器Kr(s)
另外,控制器Kr(s)也可以用一個2入2出6狀態的狀態空間形式描述,其中2個輸入為彈體系下縱、側向過載指令與實際輸出過載的差,2個輸出為俯仰舵偏角和偏航舵偏角指令。
5)控制器離散化處理:考慮到后續非線性仿真的需要,現利用Matlab中的函數c2d,采用零階保持器的方法,以5ms作為采樣周期,對上述得到的控制器狀態空間描述做離散化處理,得到一個2入2出6狀態的離散控制器狀態空間描述。
2.3 滾轉通道控制器設計
滾轉通道控制器設計方法同俯仰-偏航通道,這里不再贅述,僅給出滾轉通道的權函數和控制器設計結果。
不確定性界函數

性能權函數

控制器

離散化后的控制器可用一個單入單出3狀態的狀態空間形式描述,輸入為滾轉角指令與實際滾轉角輸出的差,輸出為副翼偏角指令。
2.4 線性仿真結果及分析
用設計好的離散控制器來控制名義被控對象,采樣周期為5ms。縱向過載指令nytc=1,側向過載指令nztc=0,滾轉角指令γ=0.5rad,指令信號均為階躍輸入。
仿真結果表明,兩通道都實現了對輸入指令信號的漸進跟蹤,且無超調,系統響應達到穩態值70%時的調節時間約為0.6s,滿足快速性要求。
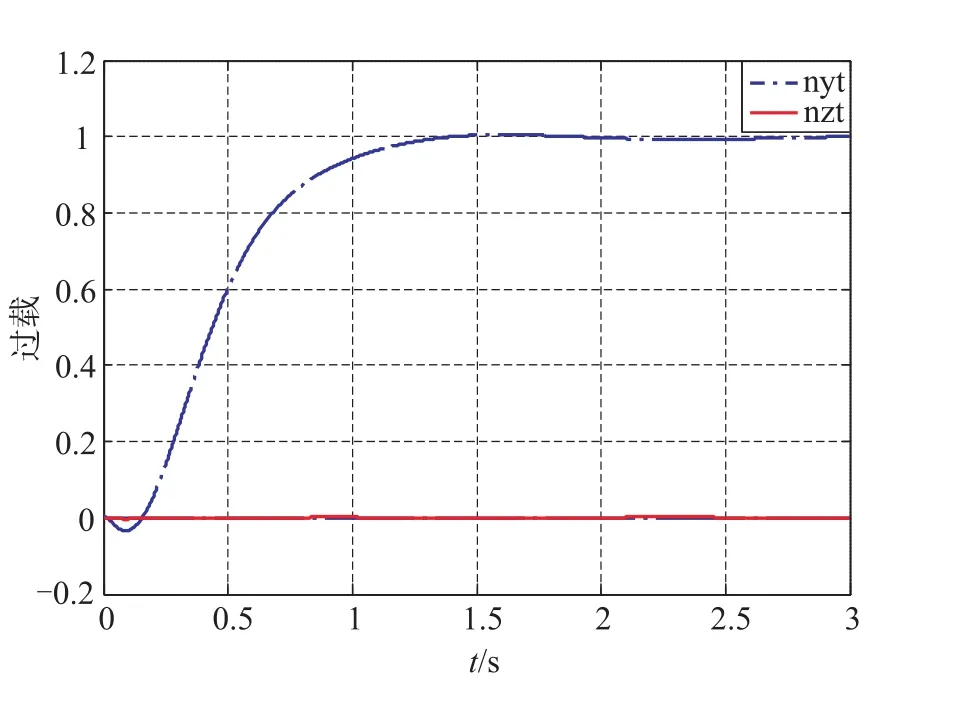
圖2 俯仰-偏航通道過載階躍響應曲線Fig.2 Overload step response curve for pitch-yaw channel
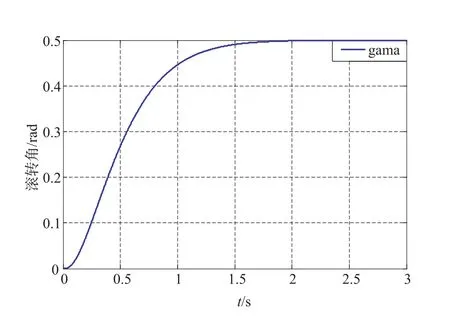
圖3 滾轉通道滾轉角階躍響應曲線Fig.3 Roll angle step response curve for roll channel
3 地形跟蹤/地形回避制導指令設計
3.1 地形跟蹤/地形回避制導策略簡介
3.1.1適應角法
本文研究重點在于BTT導彈建模和TF/TA控制器設計,故關于TF/TA制導策略的研究,本文暫且引用一些參考文獻的研究成果。基于適應角法的TF生成彈道傾角指令θFL,其具體形式為:θFL=K(λ+?+HsR-Fs)。如圖4所示:P點為前方地形最高點,Hs為安全偏置高度,R為導彈到P點的斜距,λ為雷達掃描角,?為當前導彈的俯仰角,權函數K用來控制發揮導彈的機動能力,抑制函數Fs用來推遲拉起提高隱蔽性[5-8]。因此,實現對θFL指令的跟蹤也就實現了TF飛行。類似地可以通過跟蹤ψvFL指令實現TA飛行。
3.1.2 TF/TA制導控制回路設計
要實現跟蹤期望彈道傾角θFL,可以通過控制彈道傾角θ或控制縱向過載ny來實現。由于控制過載較控制彈道傾角,相位上更加提前,另外通過對過載指令信號nyc限幅,可便于達到限制過載的目的。基于以上分析,本文采取通過控制縱向過載ny來實現TF飛行,TA飛行實現方法類似。
從彈道傾/偏角指令到彈道系下過載指令的轉換關系如下(ay為彈道系下縱向加速度):
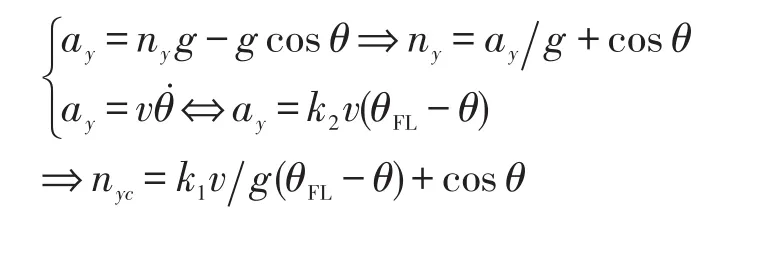
其中, gcosθ為重力加速度補償。同理nzc=k2vg(ψvFL-ψv)。經仿真調試 k1取2, k2取 0.7。制導控制回路結構如圖5所示,其中第一步指令換算在本節已完成推導,第二步指令換算環節見本文3.2節。

圖5 制導控制回路結構圖Fig.5 The guidance and control loop structure
3.2 制導指令換算
欲利用本文設計的魯棒控制器實現BTT導彈的TF/TA,需將本文3.1節中得到的彈道系下的縱側向過載指令nyc、nzc,轉換為彈體系下的縱側向過載指令nytc、nztc以及滾轉角指令。
1)將彈道系下過載指令轉換到準彈體系下
根據坐標轉換矩陣的性質可得,由彈道系到準彈體系的坐標變化矩陣為:,則得:其中為準彈體系三軸上的指令過載分量。
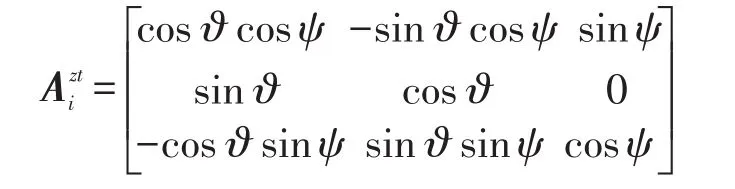
2)將過載指令由準彈體系轉換到彈體系下
根據準彈體系和彈體系的定義[3]可知,兩者僅差一個滾轉角γ,則彈體系下的過載指令和滾轉角指令可表示為:
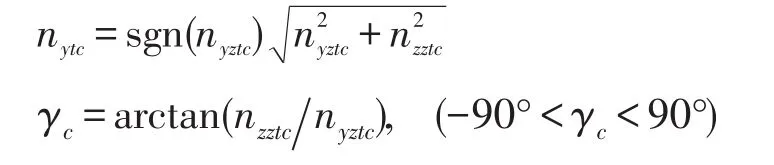
另外,為了實現較為理想的協調轉彎,彈體系下側向過載指令應為nzc=0。沿彈體縱軸過載的控制可以通過調節發動機油門來實現,本文不予考慮。至此,TF/TA指令已轉換為彈體系下過載指令和滾轉角指令。
4 六自由度非線性仿真
仿真時假定導彈保持恒速200m/s,仿真步長5ms,導彈起初為平飛狀態,仿真時間t0=15s時,導彈接收正弦彈道傾角指令信號θpr=0.12sin[0.1π(t-t0)],和斜坡彈道偏角指令ψvpr=0.02(t-t0),ψvprmax=0.2,仿真飛行水平距離為10km。干擾力和干擾力矩 ΔFyt=500N,ΔFzt=200N,ΔMyt=500N·m,ΔMzt=200N·m,仿真結果見圖6~圖9,可以看出,所設計的TF/TA控制器能夠控制導彈跟蹤期望的彈道角指令,并能有效抑制干擾。

圖6 無干擾時彈道傾角跟蹤曲線Fig.6 The following curve of trajectory inclination angle in no disturbance
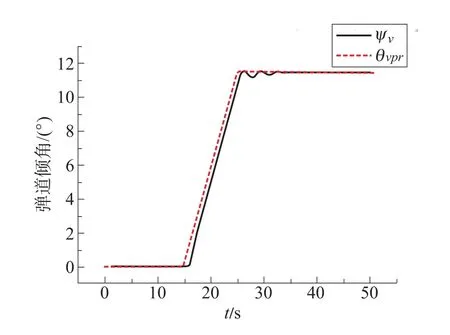
圖7 無干擾時彈道偏角跟蹤曲線Fig.7 The following curve of trajectory deflection angle in no disturbance
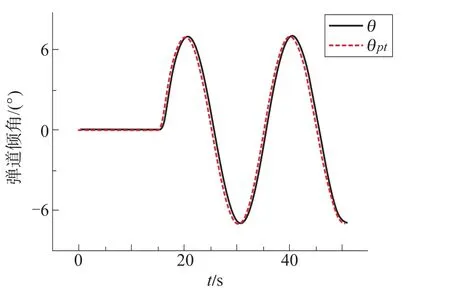
圖8 有干擾時彈道傾角跟蹤曲線Fig.8 The following curve of trajectory inclination angle in disturbance
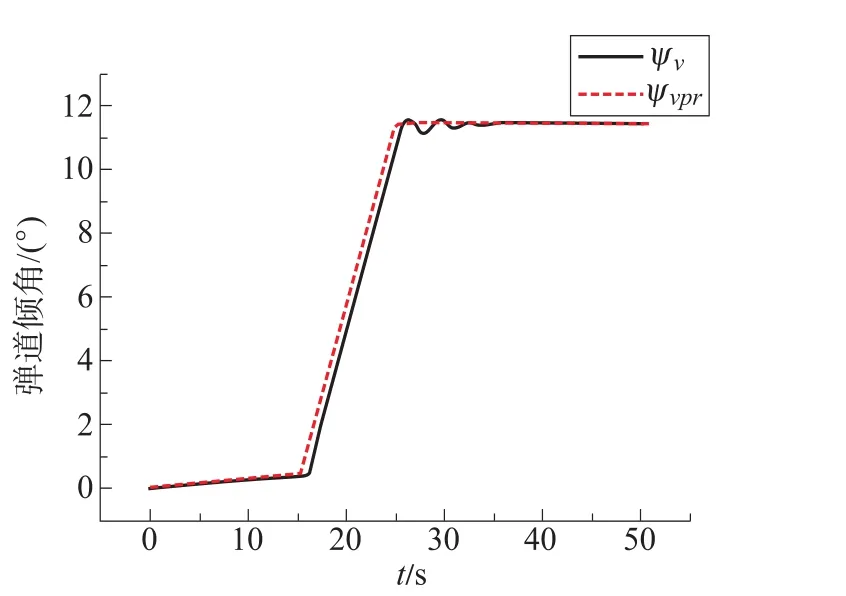
圖9 有干擾時彈道偏角跟蹤曲線Fig.9 The following curve of trajectory deflection angle in disturbance
5 結論
本文針對BTT導彈的特點,在彈體坐標系下建立了導彈的數學模型,實現了滾轉通道獨立解耦,俯仰-偏航通道耦合設計,并將俯仰—偏航通道轉換為過載數學模型,以便于工程應用。基于已建立的模型,應用H∞混合靈敏度理論設計了俯仰-偏航通道的過載控制器和滾轉通道的滾轉角控制器。針對TF/TA適應角法給出的制導指令為彈道傾/偏角的情況,推導了將彈道傾/偏角指令轉換為彈體系下縱側向過載指令和滾轉角指令的指令變換算法。最后,將設計的魯棒控制器應用到TF/TA中,并通過6DOF非線性仿真驗證了本文設計方法的有效性。
[1]周慧鐘,李忠應,王瑾玫.有翼導彈飛行動力學[M].航空工業教材編審組.
[2]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2008.5.
[3]鄭建華,楊滌.魯棒控制理論在傾斜轉彎導彈中的應用[M].北京:國防工業出版社,2001.4.
[4]楊琳,趙書強.H∞PSS設計中加權函數的選擇及模型降階[J].華北電力大學學報,2003,30:15-19.
[5]王長青,李景源.一類地形跟蹤控制系統方案探討[J].戰術導彈技術.1998(2):35-39.
[6]姚宏浩.先進控制方法在TF/TA飛行控制系統中的應用[D].西安:西北工業大學碩士學位論文.2004.
[7]L U NARDI,H Y KAWANA.Development of Automatic Terrain-Following/Automatic Terrain-Avoidance Decoupling Techniques[C]//.AIAA,NO.75-1074.
[8]Gary Balas,Richard Chiang,Andy Packard.Robust Control Toolbox Getting Started Guide.
BTT Missile Controller DesignApproach forTerrain Following and TerrainAvoiding
WEI Dong-hui,SHUI Zun-shi,XU Cheng
(Beijing Electro-mechanical Engineering Institute,Beijing 100074,China)
For BTT missile terrain following and terrain avoiding requirements,the missile dynamic mathematical model is established in the body coordinates.The roll channel is decoupled from pitch-yaw channel.Based on H-infinite mixed sensitivity theory,overload controller for pitch-yaw channel and roll angle controller for roll channel are designed.Finally.The ndinear6-DOF simulation is performed to verify the validity of the method in this article.
Bank to turn;Terrain following/terrain avoiding;H-infinite mixed sensitivity
V24
A
2095-8110(2015)02-0013-07
2014-11-18;
2015-01-09。
魏東輝(1987-),男,碩士,主要從事飛行器導航、制導與控制方面的研究。E-mail:weidonghui2652@sina.com
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
新世紀智能(數學備考)(2020年11期)2021-01-04 00:38:16
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
新高考·高一物理(2014年1期)2014-09-18 01:26:07
機電信息(2014年27期)2014-02-27 15:53:56
中國火炬(2010年7期)2010-07-25 10:26:09
