基于SEA柔性驅動的動力學模型頻域特性研究*
2015-04-19 03:01:04王存堂謝方偉
機械制造 2015年12期
□ 王存堂 □ 任 飛 □ 謝方偉 □ 張 兵
江蘇大學機械工程學院 江蘇鎮江 212013
柔性驅動技術是目前機器人行業亟需解決的一個難題[1]。在康復機器人領域,國內外開發的傳統驅動器主要以集成伺服電機的剛性驅動為主,整體柔性不足,在使用過程中極易造成二次傷害。將柔性驅動技術應用于康復機器人領域,可以滿足機器人低能耗運動、柔順化動作、自調整接觸等仿人性要求。面對這些問題,MIT的Pratt[2]研發出利用彈簧特性來設計出一種具有仿肌特征的串聯彈性驅動器(SEA)。基本SEA結構的特點就是在驅動源和負載之間串聯一個彈簧,從而實現精確的力控制,該驅動器具有較低的力輸出阻抗、摩擦因數和適當的控制帶寬。哈爾濱工程大學的馬洪文[3]等人在SEA彈性元件中加入阻尼環節,可以更好地模擬人體肌肉變剛度[4]的特性。
SEA作為一種具有仿生彈性驅動的力輸出裝置[5],可以提高康復機器人對人類受損肢體的柔順性和安全性,克服人機交互過程中的問題。SEA中彈性組件一方面可以抵抗高沖擊載荷,實現儲存和釋放能量;另一方面可通過控制形變量來實現力輸出。由于SEA具備上述優點,目前在康復、助力以及工業機器人上的應用日益廣泛[5]。近年來,許多研究人員開始關注SEA,在對SEA的動力學模型方面做出了大量分析。但還存在以下兩個問題:①忽略電器元件造成的一些因素,動力學模型太簡化,對位置源控制方法探討不足;②針對各種控制方法,在康復機器人方面,SEA的低阻抗特性要求和驅動帶寬之間呈反向關系。
由于在SEA中驅動源伺服電機可以對速度、位置精度進行準確控制[5],同時可以通過閉環反饋將電信號轉化成轉矩和轉速以驅動控制對象。因此按目前控制方式分類,SEA動力學模型可分成兩類:位置源或速度源和力源模型[2],即將電機或液壓缸看作理想的位置或速度、以及力輸出源,來控制SEA輸出端的速度或位移以及輸出力。筆者分別建立基于位置源和力源的兩種SEA動力學模型,比較其各自在穩定性、快速性和力輸出帶寬等方面的優缺點。
1 基于位置源控制的SEA動力學模型
基本的SEA模型如圖1所示,該模型是在負載和驅動源間串聯一組彈性元件[6]。
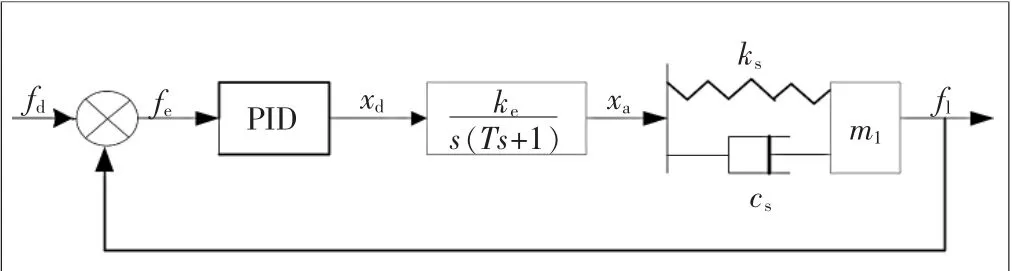
位置源控制法是指通過內部反饋控制電機的位移輸出[7],來控制輸出端的位移、速度、輸出力,如圖2所示。由圖2可知,簡化位置源控制法中內部反饋PID控制環節,SEA位置源模型如圖3所示。
圖3中:fd為給定信號;fl為負載輸出力信號;fe為偏差信號;xd為中間位移變量;ke為積分環節的比例增益;T為慣性環節的時間常數;xa為等效質量的位移;vs為相對位移速度;xl為負載位移;ks為彈簧剛度系數;cs為黏滯阻尼系數;ml為負載質量;PID控制參量分別為比例增益kp、積分因子ki、微分因子kd;s為拉普拉斯因子。

圖1 基本SEA 模型
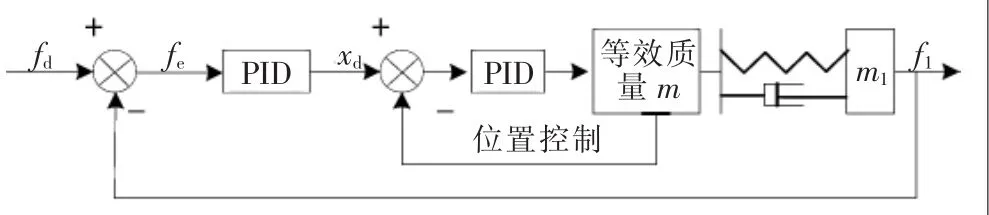
圖2 位置源SEA動力學模型

▲圖3 SEA位置源動力學簡化模型
經 Laplace 變換后,由式(1)、(2)、(3)可得:

為方便分析,不妨先假定驅動器輸出端位移為0,即Xl=0。系統開環傳遞函數為:

分析該系統的閉環傳遞函數,對于單位負反饋系統有:

經PID控制后驅動位移為:

經Laplace變換后,式(7)變成:

固定負載輸出端,即Xl=0,該系統的閉環傳遞函數為:

式中:C3=kecskd;D3=kecskd+T;C2=ke(cskp+kskd);D2=1+ke(cskP+kskd);C1=ke(cski+kskP);D1=ke(cski+kskP);C0=kekski;D0=kekski。
1.1 基于位置源控制的開環頻率特性下對閉環系統的分析
1.1.1 不同cs對系統穩定性的作用
設計參數:彈簧剛度ks=2 N/mm,積分環節放大增益ke=0.05,慣性環節時間常數T=2,當阻尼器的阻尼系數 cs分別取 0.01 N·s/mm、0.1 N·s/mm、1 N·s/mm、2 N·s/mm、5 N·s/mm 和 10 N·s/mm 時,分析系統穩定性的變化規律。
根據開環傳遞函數式(5),分別采用頻域分析法中Nyquist判據和Bode判據[8]來分析系統的穩定性。而該系統方程的特征根為:s1=0,s2=-0.5。 該系統在[s]即為橫、縱軸平面右半平面內無極點,為最小相位系統。繪制不同cs的Nyquist圖和Bode圖,如圖4和圖5所示。
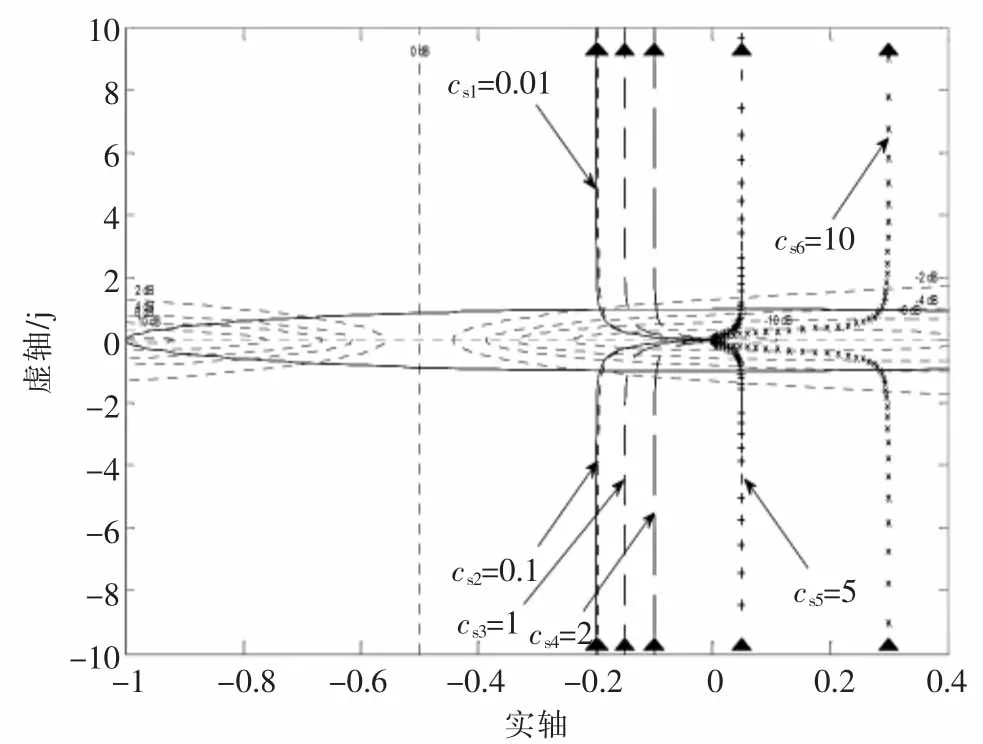
▲圖4 開環Nyquist圖(位置源、cs)

▲圖5 開環Bode圖(位置源、cs)
由圖4可知:①根據Nyquist判據可知,該閉環系統穩定;②該系統奈氏曲線與單位圓相交,均位于虛軸的右側,幅值裕度均較大。
隨著cs增大,各頻率特性曲線越來越遠離(-1,j0)點。所以穩定性越來越好,且相位裕度在增大。
由圖5可知:①由Bode判據可知,該閉環系統是穩定的,與之前分析的奈氏曲線相一致;②在Bode圖中,隨著cs增大,相角曲線與-180°線無交點且距離越來越遠。
該系統在不同cs下幅值裕度均趨于無窮大,相位裕度與cs成正比關系,當cs較大時,系統穩定性更好。
1.1.2 不同ks對系統穩定性的作用
設計參數:cs=0.1 N·s/mm,ke=0.05,T=2,當 ks分別取 0.05 N/mm、0.1 N/mm、1 N/mm、2 N/mm、5 N/mm 和10 N/mm時,分析系統穩定性的變化規律。
根據該系統方程特征根為:s1=0,s2=-0.5。繪制不同ks的Nyquist圖和Bode圖,如圖6和圖7所示。

▲圖6 開環Nyquist圖(位置源、ks)
▲圖7 開環Bode圖(位置源、ks)
由圖6可知:①根據Nyquist判據可知,該閉環系統也是穩定的;②該奈氏曲線也都與單位圓相交,均位于虛軸的右側,系統幅值裕度均較大。
但隨著ks增大,各頻率特性曲線越來越靠近(-1,j0)點。這說明系統穩定性變差,且相位裕度有減小的趨勢。
由圖7可知:①根據Bode判據可知,該閉環系統穩定,與圖6相一致;②隨著ks增大,相位曲線與-180°線無交點且距離越來越近。
因此,該系統在不同ks下幅值裕度均趨于無窮大,而相位裕度與ks成反比關系,即當ks較小時,系統具有更好的穩定裕度。
1.2 基于位置源控制的閉環頻率特性指標分析
1.2.1 不同cs對系統穩定性的作用
設計參數:kP=25,ki=2,kd=0,其它變量不變。 當 cs分別取 0.01 N·s/mm、0.1 N·s/mm、1 N·s/mm、2 N·s/mm、5 N·s/mm和10 N·s/mm時,分析系統穩定性的變化規律。當cs不同時,該系統閉環頻率特性的諧振峰值Mr、諧振頻率 ωr及頻寬 ωb見表 1。
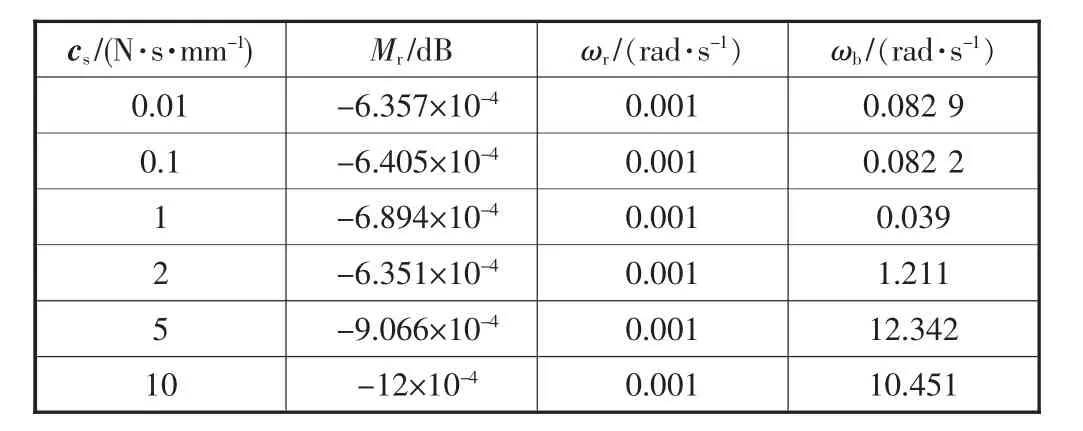
表1 位置源閉環頻率特性指標(cs)
由表 1 可知,該閉環系統的 Mr、ωr、ωb隨 cs增大的變化規律為:①當該cs較小時,其Mr較小,對應于其時域指標則階躍響應時基本無超調量,而當cs較大時,Mr均隨cs的增大有略微減小的趨勢;②隨cs的增大,ωr幾乎沒有變化,而ωb都在不斷增大,系統響應速度加快,輸出復現精度也越高。
1.2.2 不同ks對系統穩定性的作用
設計參數:kP=25,ki=2,kd=0,其它參量不變。 當 ks分別取 0.05 N/mm、0.1 N/mm、1 N/mm、2 N/mm、5 N/mm和10 N/mm時,分析系統穩定性的變化規律。當ks不同時,該系統閉環頻率特性的Mr、ωr及ωb見表2。
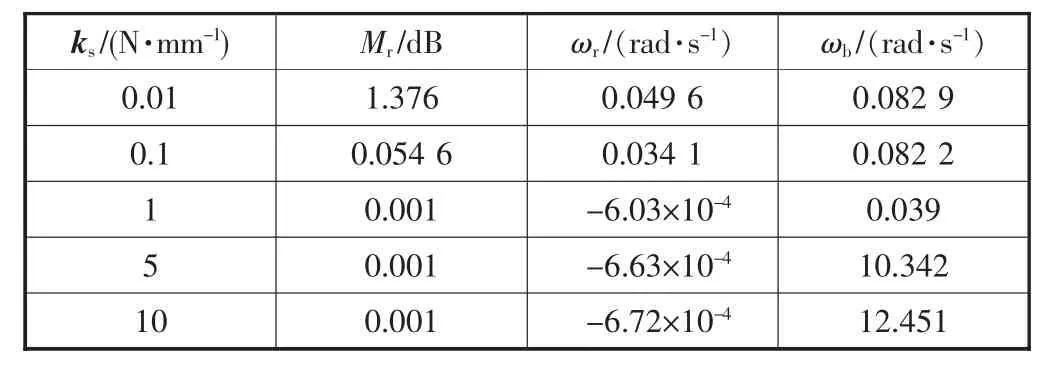
表2 閉環頻率特性指標(ks)
由表 2 可知, 該閉環系統的 Mr、ωr、ωb隨 ks的變化規律為:①當該系統ks較小時,其對數幅頻特性曲線中出現相對較大的Mr;②隨著ks的增大,其中ωb具有急劇增大的趨勢,瞬態響應速度變快,過渡的上升時間越長,因此采用位置源控制法時應盡量去選擇較小的ks。
綜上所述,對于位置源控制法(其它變量不變),隨著ks增大,系統穩定性下降,而響應速度變慢,輸出復現精度變低,高頻噪聲信號被濾掉。隨著cs增大,系統穩定性逐步增大,響應會越明顯加快,輸出復現精度越來越高。
2 基于力源控制的SEA動力學模型
圖8中fa為PID輸出力信號,m為傳動裝置等效質量,ca為電機等效阻尼,ml為負載質量,v為等效質量的速度,vl為負載速度,(其它變量與圖3相同)。

經Laplace變換可得:

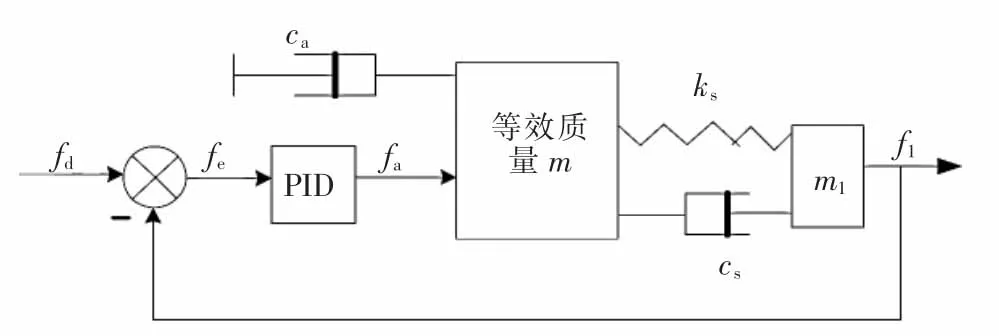
▲圖8 SEA力源動力學簡化模型
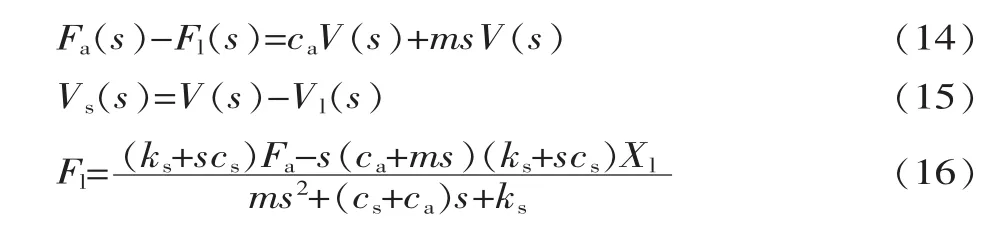
固定輸出端負載,即Xl=0,則該系統的開環傳遞函數為:

同理基于位置源控制,考慮PID控制,該閉環傳遞函數為:

式 中 :E3=kdcs;F3=kdcs+m;E2=kPcs+kdks;F2=cs+ca+kPcs+kdks;E1=kics+kskP;F1=kics+kskP+ks;E0=kiks;F0=kiks。
2.1 基于力源模型的開環頻率穩定性下對閉環系統的分析
2.1.1 不同cs對系統穩定性的作用
設計參數:m=1.5 kg,ks=2 N/mm,ca=0.5 N·s/mm。當 cs分別取 0.01 N·s/mm、0.1 N·s/mm、1 N·s/mm、2 N·s/mm、5 N·s/mm 和 10 N·s/mm 時, 分析系統穩定性的變化規律,當該系統取不同cs時,其開環函數的特征根見表3。

表3 力源開環函數特征根(cs)
因此該系統的開環函數特征根均具有負實部,即在[s]右半平面內無極點存在。
繪制不同cs下該系統開環傳遞函數的Nyquist圖和Bode圖,如圖9和圖10所示。
由圖9可知:①根據Nyquist判據可知,該閉環系統穩定;②不同cs的奈氏曲線均與負實軸沒有交點,說明幅值裕度均趨于無窮大。
隨cs增大,該系統開環奈氏曲線距離實軸上(-1,j0)點越來越遠,說明穩定性逐漸增強。
由圖10可知:①各對數相頻曲線均與-180°線無交點,與在Nyquist圖中分析得到的相一致,即幅值裕度較好;②隨著cs增大,各相頻曲線在低頻段均越來越逼近0°線,說明相位裕度越來越好,而在高頻段均呈現 -90°的相位滯后現象;③當cs較小時,對數幅頻特性圖中出現較為明顯的Mr,所以cs較小時系統穩定性較差。
2.1.2 不同ks對系統穩定性的作用
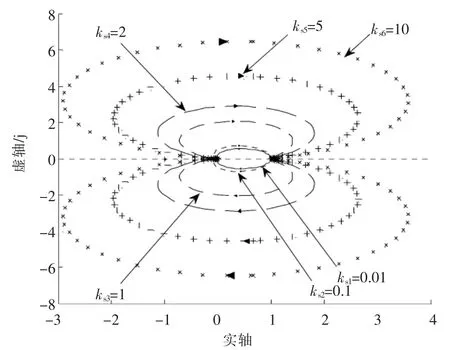
設計參數:m=1.5 kg,ca=0.5 N·s/mm,cs=0.1 N·s/mm。 當 ks分別取 0.05 N/mm、0.1 N/mm、1 N/mm、2 N/mm、5 N/mm和10 N/mm時,分析系統穩定性的變化規律,當該系統取不同ks時,其開環特征根見表4。
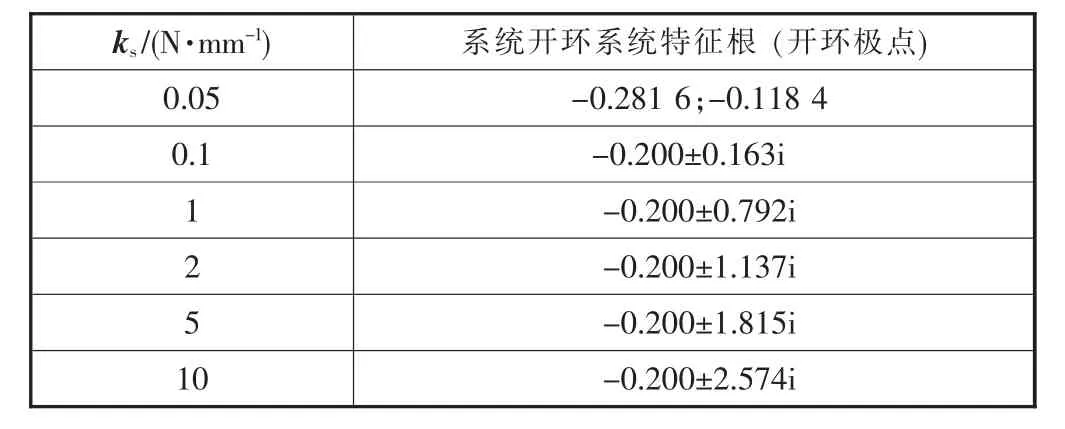
表4 力源開環函數特征根(ks)

▲圖9 開環Nyquist圖(力源、cs)

▲圖10 開環Bode圖(力源、cs)
根據該開環特征根均具有負實部,則在[s]右半平面內無極點。繪制不同ks下系統開環傳遞函數的Nyquist圖和Bode圖,如圖11和圖12所示。
由圖11可知:①根據Nyquist判據可知,該閉環系統穩定;②不同ks的奈氏曲線均與負實軸沒有交點,這說明幅值裕度均趨于無窮大。
隨著ks增大,該系統開環奈氏曲線距離實軸上(-1,j0)點越來越近,說明穩定性逐漸減弱,即ks大時系統穩定性較差。這說明ks和cs對系統穩定性的影響是反向的。
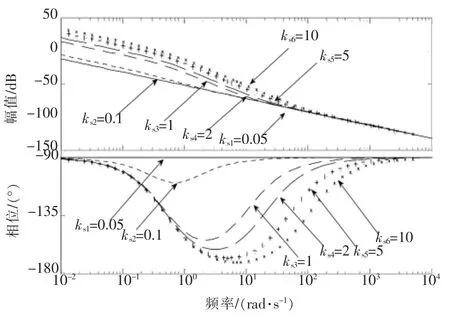
由圖12可知:①由于在對數相頻特性圖中,各曲線均與-180°線沒有交點,與在奈氏圖中分析得到的相一致,即幅值裕度較好;②隨ks增大,各相頻特性曲線在低頻段均越來越逼近0°線,說明相位裕度好,而在高頻段均呈現-90°的相位滯后現象;③當ks較大時,對數幅頻特性圖中出現較為明顯的Mr。
2.2 基于力源控制的閉環頻域特性指標分析
2.2.1 不同cs對系統穩定性的作用
設計參數: m=1.5 kg,ks=2 N/mm,ca=0.5 N·s/mm,kP=25,ki=2,kd=0。 當 cs分別取 0.01 N·s/mm、0.1 N·s/mm、1 N·s/mm、2 N·s/mm、5 N·s/mm 和 10 N·s/mm 時,分析系統穩定性的變化規律。當cs不同時,該系統閉環頻率特性的 Mr、ωr及 ωb見表 5。
▲圖11 開環Nyquist圖(力源、ks)

▲圖12 開環Bode圖(力源、ks)
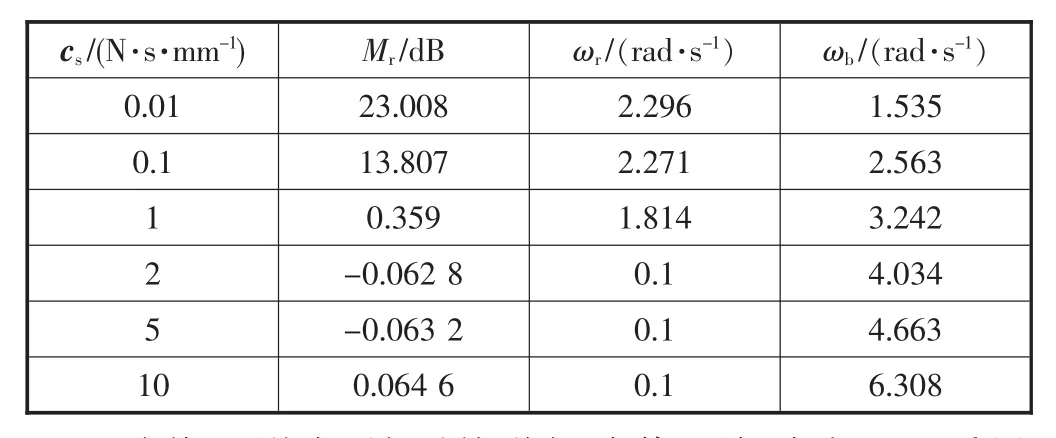
表5 力源閉環頻率特性指標(cs)
隨著cs增大,該系統諧振峰值逐漸減小至幾乎沒有,說明穩定性逐漸增強。同時,頻寬也越來越大,表明:系統的響應速度加快,高頻信號也能保證較低的失真度,而諧振頻率逐漸減小說明系統的瞬態響應速度變慢。
2.2.2 不同ks對系統穩定性的作用
設計參數: m=1.5 kg,cs=0.1 N·s/mm,ca=0.5 N·s/mm,kP=25, ki=2, kd=0。 當 ks分別取 0.05 N/mm、0.1 N/mm、1 N/mm、2 N/mm、5 N/mm 和 10 N/mm 時, 分析系統穩定性的變化規律。當ks不同時,該系統閉環頻率特性的 Mr、ωr及 ωb見表 6。

表6 力源閉環頻率特性指標(ks)
隨著ks增大,該系統的Mr逐漸增大,說明穩定性逐漸減弱。同時,ωr和ωb也越來越大,表明:系統瞬態響應速度加快,高頻信號也能保證較低的失真度。據上分析,對于力源模型而言,通過增加ks,系統穩定性減弱;但是響應速度和瞬態速度均加快,高頻信號也能保證較低的失真度。
3 結論
基于SEA柔性驅動的動力學模型穩定性分析,對機器人的柔順控制具有一定的實踐指導意義。通過對比分析兩種模型,得到結論如下。
(1)穩定性方面,力源>位置源。
(2)ks和cs不僅會顯著影響系統穩定性而且會影響其力輸出帶寬、幅相頻率特性,同時為保證SEA的柔性,選擇合適參數是非常重要的。
(3)與位置源控制法相比,力源控制法具有較大的力輸出帶寬。
(4)與力源控制法相比,位置源的幅值相位特性表現也不是很理想,主要原因是由于位置源模型是通過內部反饋來控制電機位移的,容易忽略等效質量對穩定性的影響,其固有模型誤差較大。
總之,在合理條件下,SEA的控制方式應優先選擇力源控制法。
[1]蓋玉先,劉偉穎.助行腿膝關節的串聯彈性驅動器系統設計[J].機械設計與制造,2014(9):33-36.
[2]Pratt G A.Series Elastic Actuators [C].IEEE/RZJ International Conference on Intelligent Robot and System.USA,Pittsburgh,1995.
[3]趙朋.串聯彈性驅動器動力學模型及其特性分析[D].哈爾濱:哈爾濱工程大學,2012.
[4]馬挺,郭險峰.外骨骼機器人柔性變剛度驅動器設計[J].科技資訊,2014(35):65-69.
[5]何福本,梁延德,孫捷夫,等.基于SEA的機器人仿肌彈性驅動關節研究[J].中國機械工程,2014(7):900-905.
[6]Lens T,von Styko O.Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation[C].7th German Conference on Robotics (ROBOTIK),Munich,2012
[7]殷躍紅,尉忠信,朱劍英.機器人柔順控制研究[J].機器人,1998,20(3):73-81.
[8]彭瑞珍,董海棠.控制工程基礎[M],北京:高等教育出版社,2010.
(編輯 平 平)
不斷創新,保持領先——山高刀具2015-2秋季新品閃亮發布
今年秋季,山高擴展了多個廣受歡迎的產品系列,包括Combimaster、Jabro-Solid2、Minimaster Plus 新 小 魔 王 、Steadyline 刀 頭 、Threadmaster 絲 錐 和Precimaster Plus。
山高還推出了3種TP材質等級(TP2501、TP1501和 TP0501),可滿足該應用領域中的各種需求。由于這些材質等級首次采用了山高新一代Duratomic金剛甲鍍層技術,因此它們是最可靠、最可預測和最高效的產品。80多年來,山高不斷提供車間所需的刀具、工藝和服務,以保持領先制造曲線。
適用于Steadyline抗振刀柄的帶有GL連接的MDT刀頭
山高目前將其最新開發的 GL連接與新型多方向車削 (MDT)可互換刀頭相整合,用于其Steadyline模塊化減振刀桿系統。GL連接和Steadyline刀桿的結合,使用新型MDT刀頭進行割槽和車削時,可獲得出色的精度和表面粗糙度。
憑借極其精準的 GL連接,用戶可以快速、輕松、準確地在 Steadyline刀桿上更換MDT刀頭和其它類型的刀頭。在刀桿設定到位后,無需重置系統,即可安裝和重新安裝刀頭。獲得專利的 GL連接的多面錐形接觸面有兩個安裝位置,因此MDT刀片的切削刃可以面朝上或面朝下定位,實現有效的切屑控制。
Combimaster M20
這一全新的更大刀柄連接采用 M20螺紋,使Combimaster擁有更大直徑的刀具。它提供了出色的穩定性和強度,有助于實現更高的材料切除率。M20螺紋可確保刀桿和刀體之間的連接具有最大強度。在大多數情況下,Combimaster M20可讓用戶將金屬切除率和切削深度提高達15%,從而提升總體加工性能。對于Combimaster產品系列,山高對M20連接進行了調整,使其適用于30多種新刀柄類型及50多種銑刀類型,包括圓刀片和高進給刀片產品系列。其他產品領域還包括新連接,例如方肩、插銑、球頭和鋁加工銑刀系列。
JABRO·-SOLID2立銑刀JS554-2C
作為 Jabro JS554整體硬質合金立銑刀系列的最新成員,JS554-2C具有能夠在高級粗加工應用中顯著提高進給量和金屬切除率的新功能。在銑削加工過程中,這一新刀具能夠以優化的接觸弧或嚙合角度運行,使用戶能夠充分利用現代機床的反應速度和積極的 CAM軟件刀具路徑策略。JS554-2C的高級粗加工還最大限度地延長了刀具壽命,提高了零件的表面粗糙度質量,JS554-2C可以使用刀具的整個切削長度(ap)執行側銑粗加工走刀,分屑槽形成大小可控的切屑,并防止任何長切屑重切過程(重切會使粗加工立銑刀迅速變鈍或受損)。該刀具能夠采用高徑向嚙合,有助于減少所需的粗加工走刀次數,縮短整個零件加工周期。此外,更短的切屑還可防止堵塞機床的切屑輸送系統,從而可以確保無人化加工的順利進行。
山高將JS554-2C歸類為適用于所有材料的高端通用銑刀,可替代通常用于獲得相應高級粗加工結果的"材料特定"刀具。該刀具幾乎能在所有 CAM模塊中進行加工,因此具有通用性并且易于使用。
Minimaster·Plus新小魔王
山高為其業界領先的 Minimaster Plus新小魔王可更換刀頭刀具系統推出了全新的四刃刀頭,這一四刃刀頭以及現有的三刃刀頭均可應對更大的切削力,從而在粗加工和半精加工中提高金屬切除率。四刃刀頭具有更大的螺旋角,采用了現有 Minimaster Plus新小魔王刀頭的相同設計特性和優點,并且新增了0.7xD短刃長的產品,可大幅提升其穩定性。穩定性的增加,使這款產品能更好地適應苛刻的工況,以及更適應在5軸加工中更多的底刃加工。更高的穩定性讓這款短刃長產品特別適合進行大余量材料切削,短刃長刀具在徑向切削力大于軸向切削力時,更有優勢,而較長刃長產品正好相反。
Threadmaster·絲錐
山高繼續擴展其 Threadmaster絲錐系列,新增了材料專用的絲錐以及更大螺紋尺寸的型號。目前,山高在其現有的通用絲錐產品系列中提供了330種特殊ISO材料專用絲錐以及 200多種新規格/尺寸,它們具有通用性,其中很多新絲錐都配有內冷功能。
山高的全新直槽、螺旋槽、螺旋尖和擠壓型絲錐專為 ISO P、M、N和 K材料而設計,可提供最佳的性能和有效的排屑控制。直槽絲錐的尺寸范圍為 M4到M42,帶有或不帶內冷通道;螺旋槽絲錐的尺寸范圍為 M1到M30;用于 ISO P的螺旋尖絲錐的尺寸范圍為M1到M30;擠壓絲錐的尺寸范圍為M1到M48。
M4和M5的絲錐尺寸是具有內冷功能的最小尺寸,山高的所有絲錐(專用和通用)均采用專門設計的鍍層,可以提高性能并延長刀具壽命。
新一代Precimaster·Plus鉸刀
山高推出的兩種全新刀桿設計可提供浮動和可調性,從而實現充分優化的高精度鉸削加工。作為Precimaster Plus轉位刀頭鉸削系統的接長桿,全新的PMX-FL和PMX-AD刀桿大大改善了孔表面粗糙度,消除了跳動量并糾正了偏差,并且無需使用專用刀柄。山高全新的刀桿采用了適用于此類功能的緊湊內部系統,因而無需使用專用刀柄即可提供浮動和可調性功能。相比專用刀柄,新刀桿還可使鉸刀更靠近機床主軸頭,從而減少刀具懸伸量。
山高的內置浮動系統采用純機械式,適用于靜態和車床鉸削應用,比其它類似刀具上使用的常見橡膠或合成橡膠技術更為穩定。此外,用于旋轉應用的山高新刀桿上的內部調整系統在設計上采用了機械式,并借助6個螺釘來提供精準的設置,并將主軸偏差量有效地糾正到0.005 mm以下。
TP2501、TP1501和 TP0501鋼件車削材質等級
TP2501、TP1501和TP0501刀片為ISO P鋼件材料類別中的工件提供大量解決方案選擇,同時還適用于不銹鋼和鑄鐵。已用切削刃檢測功能是對客戶反饋的直接回應,因為操作員在嘗試識別已用切削刃時通常會感到很困難。這些材質等級能使用戶快速找出與工件接觸過的切削刃,甚至是在非常輕的精加工走刀中。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19