基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法
2015-04-21 01:27:20王常虹董漢成凌明祥李清華
東北石油大學學報 2015年4期
王常虹,董漢成,凌明祥,李清華
?
基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法
王常虹,董漢成,凌明祥,李清華
(哈爾濱工業大學 空間控制與慣性技術研究中心,黑龍江 哈爾濱 150001 )
為防止鋰離子電池失效導致的系統失效,提出一種基于DS數據融合與支持向量回歸機粒子濾波(Support Vector Regression-Particle Filter,SVR-PF)的鋰離子電池剩余有效工作時間(Remaining Useful Life,RUL)預測方法.結果表明:該預測方法能夠融合不同數據源對鋰離子電池RUL的預測結果,改進可用數據較少時RUL的預測準確度.
鋰離子電池; RUL; DS數據融合; SVR-PF
0 引言
鋰離子電池被廣泛應用于各種電子設備,為設備的正常運行提供必要的能源[1-2].電池的剩余有效工作時間(Remaining Useful Life,RUL)定義為在一個特定的運行條件下,電池從當前運行狀態衰退至無法正常工作狀態所需要的RUL,為電池視情維護(Condition Based Maintenance,CBM)的重要指標[3].因此,尋找一個可靠且準確的途徑預測鋰離子電池的RUL,可以提供鋰離子電池系統維護或更換的相關信息[4-5].
數據驅動算法(Data-driven Algorithm)可以利用實測電池數據建立電池的回歸模型,用于鋰離子電池RUL預測[6].Juan Carlos Alvarez Anton等[7]應用支持向量回歸機(Support Vector Regression,SVR),分析鋰離子電池荷電狀態與電池電壓、電流、溫度的關系,建立估計電池使用狀態的數據驅動模型,分析電池的健康狀態(State-of-Health,SoH),預測電池的RUL.Weng Caihao[8]與Adnan Nuhic[9]等利用支持向量回歸機,建立電池的健康狀態(State of Health,SoH)模型,即電池容量與充放電周期、電池開路電壓的關系,預測電池性能衰退與RUL.遞歸濾波算法(Recursive Filter Algorithm)基于電池狀態空間模型,可以利用實測電池數據分析、估計與預測電池的故障,用于鋰離子電池RUL預測[10].Dare Andre等[11]建立含有無跡卡爾曼濾波器(Unscented Kalman Filter,UKF)與卡爾曼濾波器的雙濾波器估計模型,利用鋰離子電池的電壓、電流與充放電周期數估計電池的剩余容量與荷電狀態,預測鋰離子電池的RUL.He Wei[12]與Miao Qiang[13]等將衛星鋰離子電池的容量作為分析參數,對容量隨時間衰退的特性進行數據挖掘,建立衰退趨勢方程,以估計容量隨時間的衰退趨勢,估計鋰離子電池的當前工作狀態,預測鋰離子電池的RUL.Bhaskar Saha等[14]應用向量機平滑后得到的阻抗數據與容量數據,分析衛星鋰離子電池性能隨時間衰退的趨勢,預測鋰離子電池的RUL.
鋰離子電池的RUL預測需要分析可用數據,以估計電池的當前狀態,預測電池性能的衰退趨勢,在可用數據量很少時,鋰離子電池RUL的預測準確度降低,現有文獻未提出有效解決方法.筆者采用基于阻抗的鋰離子電池RUL預測方法[15]、基于容量的鋰離子電池RUL預測方法[16],以及提出的基于DS數據融合理論(Dempster-Shafer Theory)與支持向量回歸機粒子濾波(Support Vector Regression-Particle Filter,SVR-PF[15])的預測方法,融合不同數據源對鋰離子電池RUL分析結果,比較3種方法的預測性能,以在可用數據較少時得到準確的預測結果.
1 DS數據融合
1.1 理論
DS數據融合理論(Dempster-Shafer Theory)[17]利用基本概率賦值 (Basic Probability Assignment,BPA) 函數對來自不同源的數據進行融合,對辨識框架(Frame of Discernment)中所有可能發生的命題進行可信度(Belief)分析,利用融合規則結合所有命題發生的可信度,從而達到數據融合的目的.
設m1與m2為在辨識框架中兩個BPA函數,m1,2為融合后的BPA函數,則DS數據融合可以表示為
m1,2(?)=0,
(1)
(2)
其中

(3)
DS數據融合理論結合對同一問題不同源的相同觀點,同時剔除所有的沖突觀點,可以得到更加可靠的融合后驗BPA函數.
1.2 應用
基于DS數據融合的鋰離子電池RUL預測具有兩個數據源:(1)利用阻抗數據的RUL預測;(2)利用容量數據的RUL預測.筆者提出的基于DS數據融合與SVR-PF的鋰離子電池RUL預測融合兩種方法得到的預測結果,最終得到融合預測結果.
將全集即辨識框架Ω記為
Ω={im,cap},
(4)
則冪集2Ω為
2Ω={?,{im},{cap},{im∪cap}},
其中冪集2Ω中所有命題的含義為
(1){im}代表利用阻抗數據預測得到的RUL可信度;
(2){cap}代表利用容量數據預測得到的RUL可信度;
(3){im∪cap}代表利用阻抗或容量數據預測得到的RUL可信度.
同時,定義在冪集2Ω上的BPA函數m1與m2代表的含義為
(1)m1為利用阻抗數據對RUL進行預測時對冪集2Ω中命題的可信度分配;
(2)m2為利用容量數據對RUL進行預測時對冪集2Ω中命題的可信度分配.
基于DS數據融合的BPA函數結合方式見表 1,其中x=m1(im∪cap)m2(im∪cap).

表1 基于DS數據融合的BPA函數結合方式Table 1 The combination of BPA function based on DS theory
基于表 1,可以得到數據融合后的后驗BPA函數m為
(6)
(7)
其中
a=m1(im)m2(im)+m1(im∪cap)m2(im)+m1(im)m2(im∪cap),
(8)
b=m1(cap)m2(cap)+m1(im∪cap)m2(cap)+m1(cap)m2(im∪cap),
(9)

(10)
由此得到DS數據融合在鋰離子電池RUL預測中方法,利用后驗融合BPA函數式與將兩類方法的預測結果結合,以得到更加準確的預測結果.
2 實測鋰離子電池阻抗與容量數據
所用鋰離子電池阻抗與容量數據在美國愛達荷國家實驗室(IdahoNationalLaboratory)測得[18].實驗用鋰離子電池型號為Gen2 18650-size,實驗在室溫(24 ℃)與43 ℃溫度條件下恒溫進行,分為3個循環的測試階段:(1)充電:1.5A恒流充電至電壓4.2V,隨后恒壓充電至電流20mA;(2)放電:2.0A電流恒壓放電至電壓2.5V;(3)阻抗:進行0.1~5.0kHz掃頻,得到電化學阻抗譜,進而得到電池阻抗.
共用4塊電池.電池5、6與7的實測數據見圖1,在室溫(24 ℃)條件下恒溫測得;電池32的實測數據見圖2,在43 ℃溫度條件下恒溫測得.由圖1-2可以看出,鋰離子電池容量隨著充放電周期的增加而減少,阻抗隨著充放電周期的增加而增加.利用測得的電池數據驗證文中提出的鋰離子電池RUL預測方法的性能.

圖1 電池5、6、7容量與阻抗數據Fig.1 Capacity and impedance data of battery 5,6 and 7
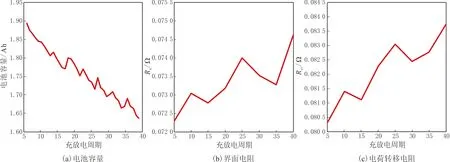
圖2 電池32容量與阻抗數據Fig.2 Capacity and impedance data of battery 32
持續的充放電過程加速電池的性能衰退,同時阻抗測試提供電池內部參數的變化方式.當電池達到壽命終點時實驗停止,將電池達到壽命終點(EndofLife,EOL)時容量占標稱容量的百分比稱為EOL門限.由于各個電池停止實驗時的容量值不同,因此EOL門限也不同,電池5、6、7、32的EOL門限分別為70%、65%、75%、95%.
3 基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法
3.1 預測過程
3.1.1 初始狀態
(1)首先分析BPA函數m1,i(im)的初值,由中心極限定理可知,大量的阻抗數據測量誤差服從正態分布,即
(11)
(12)
由文獻[15]可知:
(13)
因此容量估計Cim,N服從正態分布,即
(14)
其中
μCim,N=αN(μRe,N+μRct,N)+βN=CN,
(15)

(16)
由此得到BPA函數m1,i(im)的初值m1,N+1(im)為
(17)
(2)然后計算BPA函數m2,i(cap),同樣由中心極限定理可知,大量的容量數據測量誤差服從正態分布,即
(18)

μCcap,N=CN,
(19)
則BPA函數m2,i(cap)的初值m2,N+1(cap)為
(20)
在得到BPA函數m1,N+1(im)與m2,N+1(cap)值后,對其他的BPA函數值進行分析.由于兩類預測方法沒有關聯,可得
m1,N+1(cap)=m2,N+1(im)=0.
(21)
根據BPA函數的性質可得
m1,N+1(im∪cap)=1-m1,N+1(im)-m1,N+1(cap)=1-m1,N+1(im),
(22)
m2,N+1(im∪cap)=1-m2,N+1(im)-m2,N+1(cap)=1-m2,N+1(cap).
(23)
(3)在確定所有的BPA函數值后,計算后驗融合BPA函數值,將融合后的BPA函數表示為m,由式(6)與式(7)可知:
(24)
其中
(25)
其中
m1,N+1(im)m2,N+1(cap)=m1,N+1(im)m2,N+1(cap).
(26)
(27)
由此得到基于DS數據融合與SVR-PF鋰離子電池RUL預測的初始狀態,即
Initial=[m1,N+1(im),m1,N+1(cap),m1,N+1(im∪cap),m2,N+1(im),m2,N+1(cap),
(28)
3.1.2 預測過程

(29)
(30)
由于兩類預測模型沒有關聯,可知
m1,k+1(cap)=m2,k+1(im)=0.
(31)
基于BPA函數性質,有
m1,k+1(im∪cap)=1-m1,k+1(im),
(32)
m2,k+1(im∪cap)=1-m2,k+1(cap).
(33)
步驟2:預測第k+1個充放電周期的容量值.由式(6-7)、式(29-33)可知,后驗融合BPA函數mk+1(im)與mk+1(cap)為
(34)
(35)

(36)

(37)

3.2 預測模型
建立基于DS數據融合與SVR-PF的鋰離子電池RUL預測模型:
(38)
其中狀態Xk為
(39)
式中:Xim,k為利用阻抗數據分析得到的狀態;Xcap,k為利用容量數據分析得到的狀態;XDS,k為利用DS數據融合分析得到的狀態,并且有
(40)
(41)
(42)
式(40-42)中:λR,k為第k個充放電周期辨識出的阻抗衰退參數[15];R1,k、λR1,k、R2,k和λR2,k為在第k個充放電周期的基于容量數據分析得到的容量衰退參數[16];*為對應變量的預測值.
由此,結合文獻[15-16]RUL預測模型,可得預測模型式(38)的狀態方程,其中利用阻抗數據分析的部分狀態方程為
(43)
式中:αN、βN為第N個充放電周期的基于阻抗數據分析得到的容量衰退參數估計值.
利用容量數據分析的部分狀態方程:
(44)
利用DS數據融合的部分狀態方程:
(45)
組合式(43-45)得到預測模型式(38)的狀態方程,式(38)的測量方程表示為
(46)
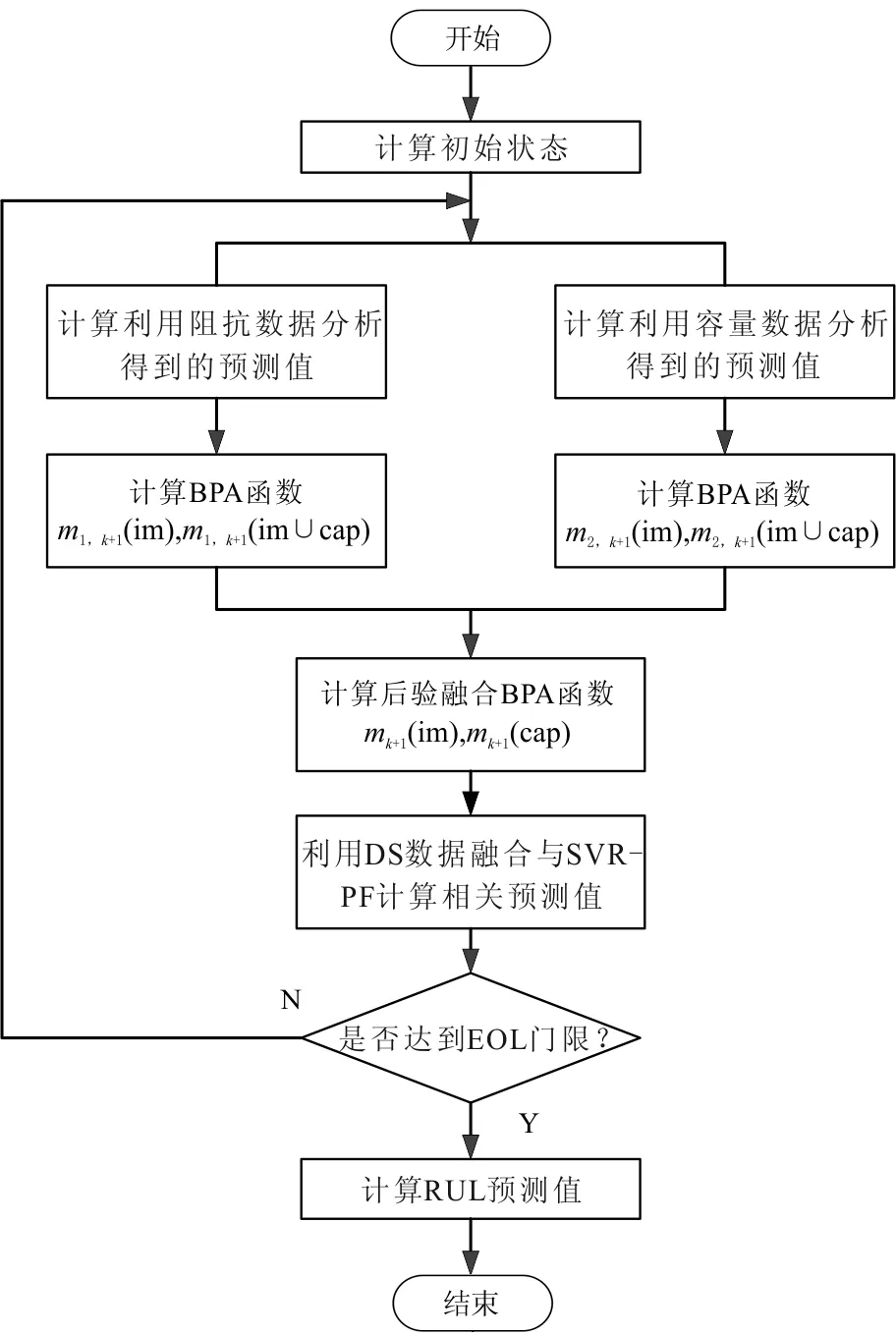
圖3 基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法流程Fig.3 Process of Lithium-ion battery RUL prediction based on DS theory and SVR-PF
綜上所述,基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法流程見圖3.
4 仿真實例
為了對比提出的基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法,與文獻[15]利用阻抗的RUL預測方法和文獻[16]利用容量的RUL預測方法在可用數據較少時的RUL預測性能,應用電池5、6、7、32的數據.將電池5、6、7、32的RUL預測門限分別設為90%、85%、95%、95%標稱容量.RUL預測門限值定義為低于電池最大容量(100%)的百分比,其對應容量高于電池EOL門限對應容量.高RUL預測門限使得算法用于分析電池健康狀態的數據變少,使用條件變得苛刻,以檢驗算法在可用數據較少時的性能.
電池RUL與EOL的預測結果見表2.電池RUL與EOL的誤差預測結果見表3.3種方法的電池5、6、7、32的數據預測結果見圖4-7.
由表2-3和圖4-7可知,文中提出的基于DS數據融合與SVR-PF的RUL預測方法比文獻[15]與文獻[16]方法的預測結果更準確,具有更小的預測誤差.原因是提出的基于DS數據融合與SVR-PF的RUL預測方法可以融合另外2種方法的預測結果,相對于單一方法的預測結果更加可靠.
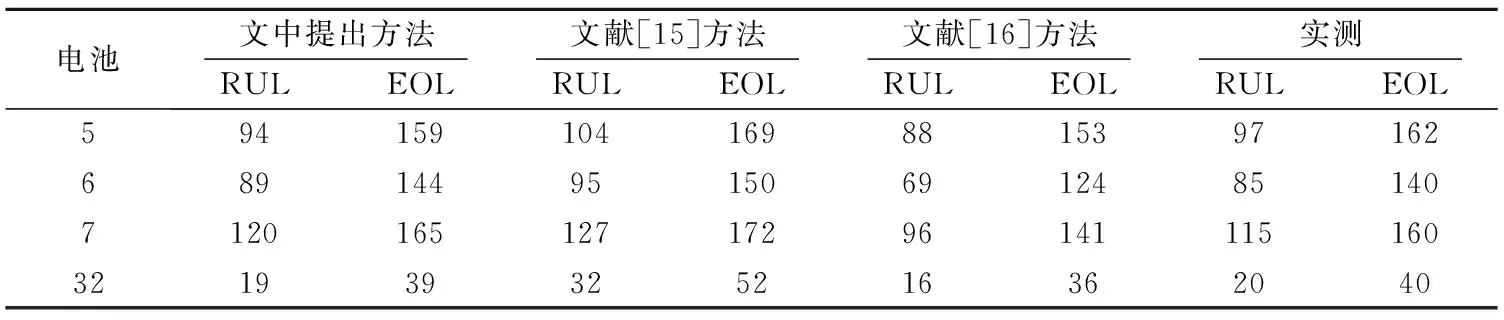
表2 3種方法電池的RUL與EOL預測結果 充放電周期Table 2 RUL and EOL prediction results of the 3 methods %
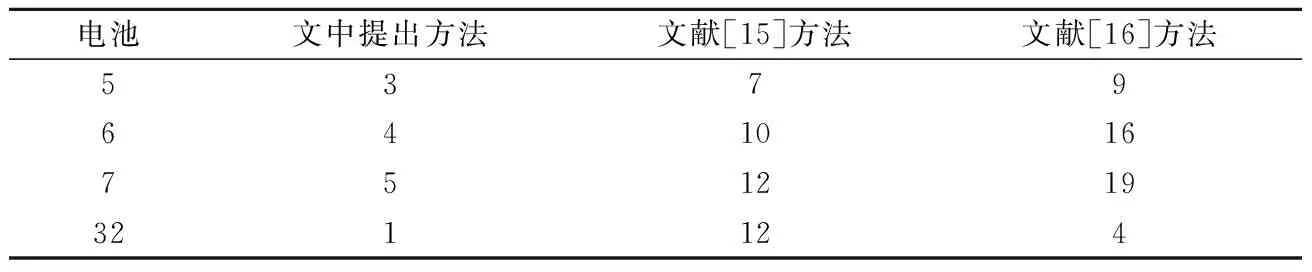
表3 3種方法電池的RUL與EOL預測誤差結果 充放電周期Table 3 RUL and EOL prediction errors of the 3 methods %
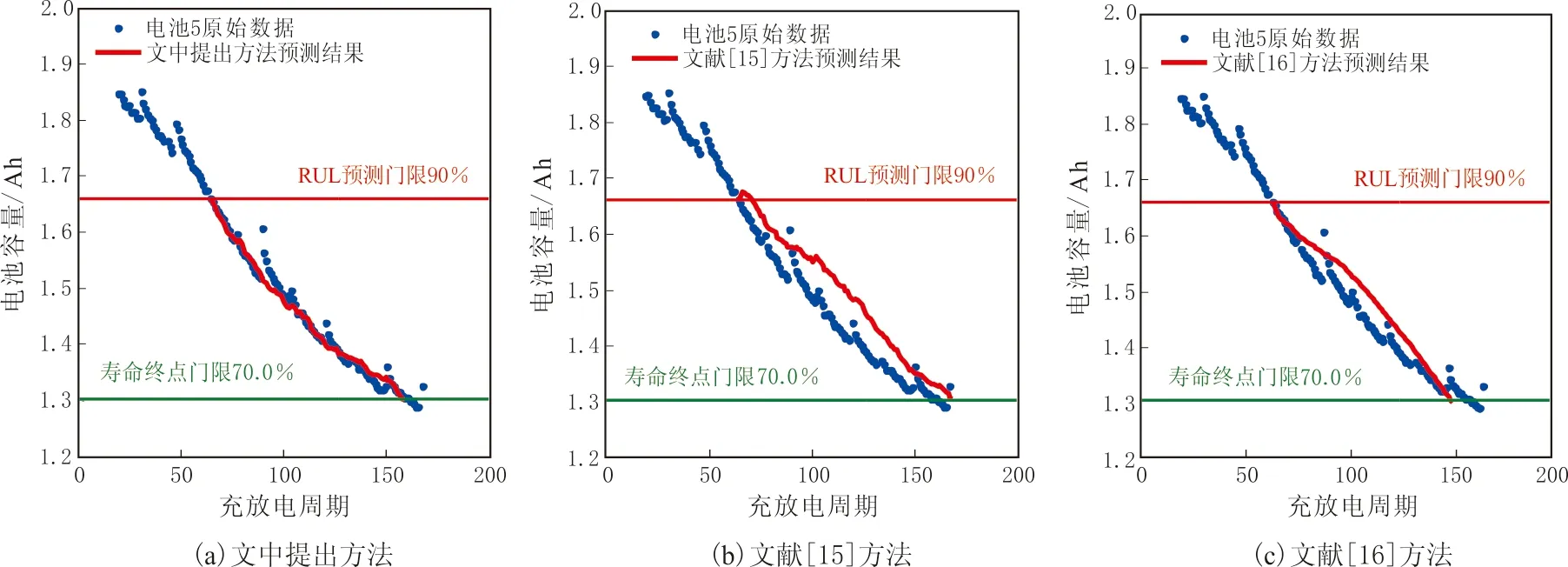
圖4 電池5的3種方法預測數據Fig.4 Battery 5 prediction results of the 3 methods
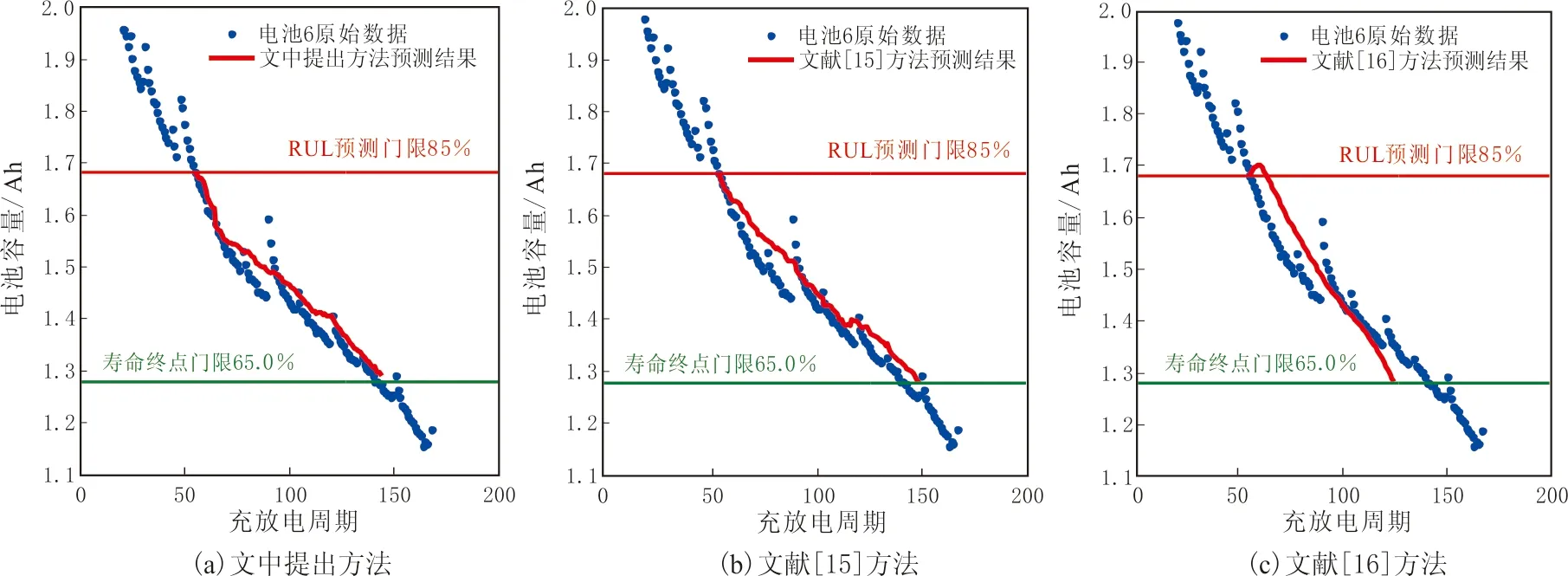
圖5 電池6的3種方法預測數據Fig.5 Battery 6 prediction results of the 3 methods
圖6 電池7的3種方法預測數據Fig.6 Battery 7 prediction results of the 3 methods
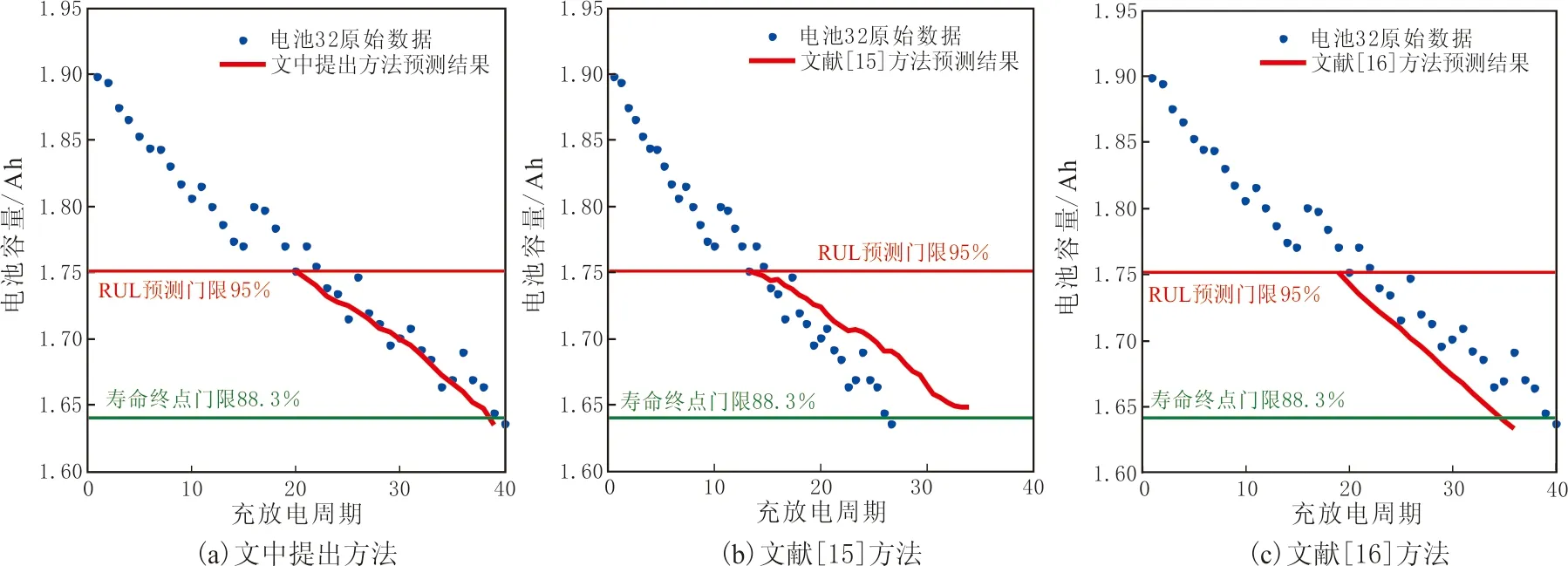
圖7 電池32的3種方法預測數據Fig.7 Battery 7 prediction results of the 3 methods
5 結束語
提出一種基于DS數據融合與SVR-PF的鋰離子電池RUL預測方法,它有效結合利用阻抗數據與利用容量數據的RUL預測方法,使得RUL預測過程更加可靠.在可用數據較少時,與利用阻抗和利用容量的RUL方法相比鋰離子電池RUL預測結果更加準確.
[1] Lu Languang, Han Xuebing, Li Jianqiu, et al.A review on the key issues for lithium-ion battery management in electric vehicles [J].Journal of Power Sources, 2013,226(1):272-288.
[2] Xing Yinjiao, Eden W M, Tsui K L, et al.Battery management systems in electric and hybrid vehicles [J].Energies, 2011,4(12):1840-1857.
[3] Si Xiaosheng, Wang Wenbin, Hu Changhua, et al.Remaining useful life estimation-a review on the statistical data driven approaches [J].European Journal of Operational Research, 2011,213(1):1-14.
[4] Wang Dong, Miao Qiang, Michael P.Prognostics of lithium-ion batteries based on relevance vectors and a conditional three-parameter capacity degradation model [J].Journal of Power Sources, 2013,239(1):253-264.
[5] Eddahech A, Briat O, Woirgard E, et al.Remaining useful life prediction of lithium batteries in calendar ageing for automotive applications [J].Microelectronics Reliability, 2012,52(1):2438-2442.
[6] Seyed Mohammad Rezvanizaniani, Liu Zongchang, Chen Yan, et al.Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (Ev) safety and mobility [J].Journal of Power Sources, 2014,256(1):110-124.
[7] Juan Carlos Alvarez Anton, Paulino Jose Garca Nieto, Cecilio Blanco Viejo, et al.Support vector machines used to estimate the battery state of charge [J].IEEE Transactions on Power Electronics, 2013,28(12):5919-5926.
[8] Weng Caihao, Sun Jing, Peng Huei.A unified open-circuit-voltage model of Lithium-Ion Batteries for State-of-Charge estimation and State-of-Health monitoring [J].Journal of Power Sources, 2014,258(1):228-237.
[9] Adnan Nuhic, Tarik Terzimehic, Thomas Soczka-Guth, et al.Health diagnosis and remaining useful Life prognostics of lithium-ion batteries using data-driven methods [J].Journal of Power Sources, 2013,239(1):680-688.
[10] Gregory L P.Extended Kalman filtering for battery management systems of lipb-based hev battery packs [J].Journal of Power Sources, 2004,134(2):252-292.
[11] Dave Andre, Christian Appel, Thomas Soczka-Guth, et al.Advanced mathematical methods of SOC and SOH estimation for lithium-ion batteries [J].Journal of Power Sources, 2013,224(1):20-27.
[12] He Wei, Nicholas Williard, Michael Osterman, et al.Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the bayesian Monte Carlo method [J].Journal of Power Sources, 2011,196(1):10314-10321.
[13] Miao Qiang, Xie Lei, Cui Hengjuan, et al.Remaining useful life prediction of lithium-ion battery with unscented particle filter technique [J].Microelectronics Reliability, 2013,53(1):805-810.
[14] Bhaskar Saha, Kai Goebel, Scott Poll, et al.Prognostics methods for battery health monitoring using a bayesian framework [J].IEEE Transactions on Instrumentation and Measurement, 2009,58(2):291-296.
[15] Dong Hancheng, Jin Xiaoning, Lou Yangbing, et al.Lithium-ion battery state of health monitoring and remaining useful life prediction based on support vector Regression-Particle filter [J].Journal of Power Sources, 2014,2014(1):114-123.
[16] 王常虹,董漢成,凌明祥,等.車用鋰離子電池剩余有效工作時間預測方法[J].汽車工程,2015,37(4):476-479.Wang Changhong, Dong Hancheng, Ling Mingxiang, et al.Remaining useful life prediction of automotive lithium-ion battery [J].Automotive Engineering, 2015,37(4):476-479.
[17] Priyanka Aggarwal, Deepak Bhatt, Vijay Devabhaktuni.Dempster shafer neural network algorithm for land vehicle navigation application [J].Information Sciences, 2013,253:26-33.
[18] Kai Goebel Bhaskar Saha, Jon Christophersen.Comparison of prognostic algorithms for estimating remaining useful life of batteries [J].Transactions of the Institute of Measurement and Control, 2009,31(3):293-308.
2015-04-27;編輯:任志平
國家自然科學基金項目(61375046);中央高校基本科研業務費專項基金項目(HIT.NSRIF 2014031)
王常虹(1961-),男,博士,教授,主要從事智能控制與智能系統方面的研究.
TM912
A
2095-4107(2015)04-0109-10
DOI 10.3969/j.issn.2095-4107.2015.04.014
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
現代出版(2020年3期)2020-06-20 07:10:34
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34