基于接近式光刻機的掩模移動曝光對準系統設計**
2015-04-23 12:45:18佟軍民
制造技術與機床 2015年8期
關鍵詞:系統
佟軍民 胡 松
(①許昌職業技術學院,河南 許昌 461000;②中國科學院光電技術研究所,四川 成都 610209)
掩模移動曝光技術既可以制作柱狀陣列微光學元件,也可以制作旋轉陣列微光學元件[1-3],在平行均勻曝光光線的作用下,如果具有周期圖形開口函數的掩模版相對于涂有光刻膠的基片沿一個方向勻速移動,那么曝光顯影后,光刻膠上將得到柱狀陣列微光學元件。如果掩模版先沿一個方向移動曝光,然后將掩模版準確旋轉90°后再沿與之垂直的另一方向移動曝光,顯影后將得到旋轉陣列微光學元件。為了實現曝光顯影后精確的三維圖形光學元件,需要掩模版相對于基片的對準誤差足夠小。掩模版的對準誤差可以理解為掩模坐標系經對準測量、調整以后,掩模坐標系相對基片坐標系的偏移量。
利用投影式光刻機實現掩模移動曝光技術的原理,它的優點是光刻分辨力高,但系統結構復雜,成本高。為了降低成本,滿足研發工作中制作連續浮雕微光學元件的需要,更適合于采用接近式光刻機[4]。
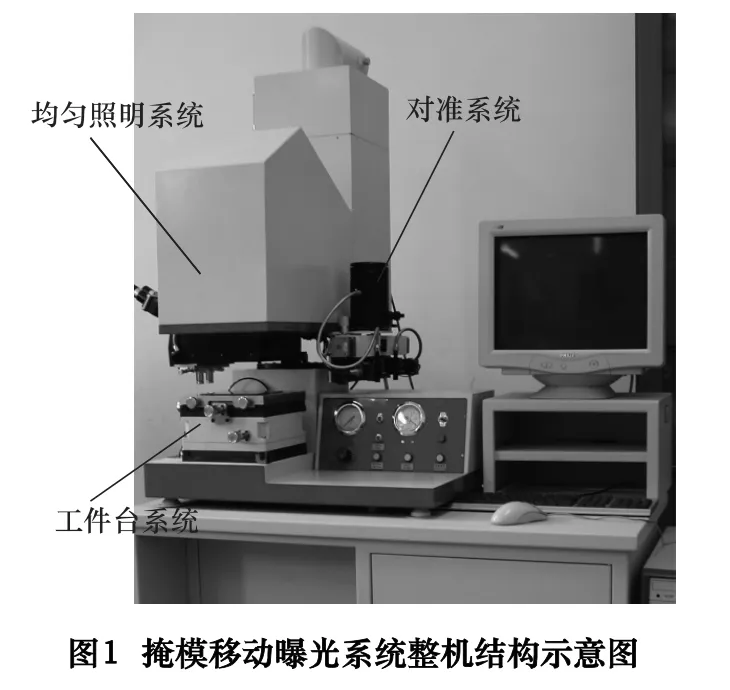
按照基于接近式光刻機掩模移動曝光技術制作微光學元件對曝光系統的性能要求,整套曝光系統需要由3 個分系統組成:均勻照明系統,對準系統和工件臺系統。圖1 為掩模移動曝光系統的整機結構示意圖。在接近式光刻機掩模移動曝光技術中,要求的對準精度為1 μm 。
1 對準方案[5-7]
1.1 銷釘實現掩模對準方案
由于制作旋轉陣列的微光學元件時,需要掩模版圖案準確地旋轉90°,以使掩模版圖案和第二次移動曝光的方向一致。
在制作的元件精度要求不太高時,預對準采用X-Y 二維臺上的3 個銷釘調整掩模版上的圖案方向,但該方法對準后,對準誤差較大。主要原因有兩個,一是因為掩模版4 條邊由于加工、磨損等原因,相鄰兩邊存在較大垂直度誤差θ 所引起。如圖2 所示,當沿Y向移動曝光時,掩模版上圖案雖然通過邊bc 調整得和移動方向相一致了,當由于第2 次沿X 方向移動曝光前,要通過ab 邊和銷釘p、q 接觸來保證旋轉90°,必然導致掩模版上的圖案和X 移動方向產生不一致,其誤差為θ。

另一個原因是因為定位銷釘p、q 和工件臺X 向或Y 向不平行導致(與銷釘的加工精度和裝配精度有關)。所以,當制作精度要求較高的旋轉陣列微光學元件時,需要采用類似集成電路制造中的對準技術才能保證掩模版圖案相對基片的兩次移動曝光方向一致。所以僅采用銷釘實現掩模版的對準,將產生較大的對準誤差,不能滿足制作高精度微光學元件的要求,只能作為預對準使用。
1.2 基于CCD 視頻圖像的對準方案
為了獲得較高的對準精度,滿足掩模移動曝光的需要,曝光系統的對準系統采用基于CCD 視頻圖像的對準系統,這種系統較之顯微鏡對準方式具有如下優點:對準精度高;通過屏幕數字顯示可克服目視對準的視差(對準精度不因人而異);工作更為方便且易升級為自動對準。
1.2.1 對準系統坐標系的建立
(1)機器坐標系的建立
機器坐標系是掩模移動曝光系統的主坐標系,它是工件臺系統安裝的依據,也是確定硅片和掩摸對準標記位置的依據。整機裝配時,首先以光刻機機座邊緣作為基準安裝CCD 對準系統(由兩只CCD 數據采集系統組成),然后以兩個CCD 靶面中心探測象素的連線為基準裝配工件臺的X 向導軌,使兩者保持平行,再以X 向導軌為基準安裝Y 向移動導軌,使兩移動方向保持垂直。安裝X 向測量光柵時,也要與兩個CCD 靶面中心探測象素的連線保持平行,Y 向測量光柵與之保持垂直。這樣機器坐標系就建立起來了。坐標系的原點由兩個CCD 靶面中心探測象素所決定;X軸為兩個CCD 靶面中心探測象素的連線;在CCD 靶面內,過原點,且垂直于X 軸的軸為Y 軸;Z 軸由X 軸和Y 軸所確定。
(2)掩模坐標系的建立
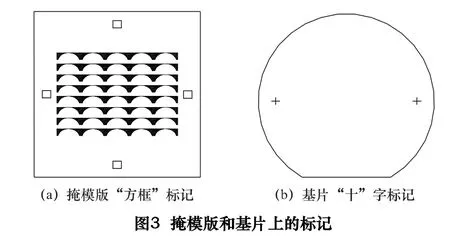
為了保證兩次移動曝光時的掩模版圖形保持垂直關系,在掩模版上設計4 個對準標記,如圖3a 所示。掩模版上4 個“方框”標記和掩模圖形一起制作,以保證它們之間有正確的相對位置,并要求水平方向的兩個“方框”中心連線和豎直方向的兩個“方框”中心連線相互垂直,且中心距相等。則兩連線的交點為掩模坐標系的原點;兩個相互垂直的“方框”中心連線分別是掩模坐標系的X 軸和Y 軸;Z 軸由X 軸和Y 軸所確定。
(3)基片坐標系的建立
在X、Y 兩個方向移動疊加曝光前,需要在基片上通過曝光顯影的方式先制作出兩個“十”字標記,如圖3b 所示。要求兩個“十”字標記中心距和掩模版上“方框”標記的中心距相等。則兩個“十”字標記中心連線即為基片坐標系的X 軸;兩個標記的中心為原點;在基片平面上,過原點,與X 軸垂直的軸即為Y軸;Z 軸由X 軸和Y 軸所確定。
1.2.2 掩模移動曝光的對準流程
以制作旋轉拋物面連續浮雕微光學元件為例,說明對準流程。如前所述,在這種類型的元件制作過程中,需要工件臺沿X、Y 向兩次移動疊加曝光,因而基片只需要一次安裝定位,由一次對準(一次預對準和一次精對準)實現,掩模需要兩次安裝定位,由兩次對準(兩次預對準和兩次精對準)實現。具體如下:
(1)第一次移動曝光基片和掩模預對準
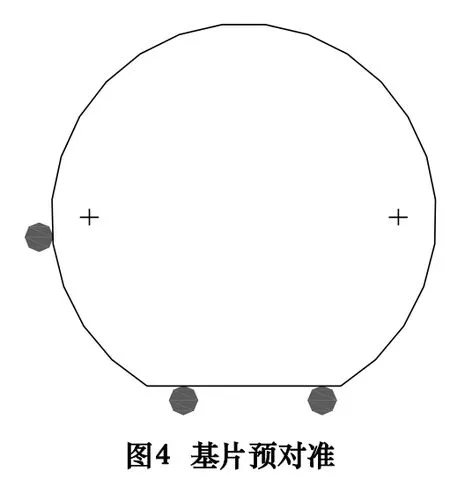
對準之前,依次將基片和掩模版分別進行預對準,以保證基片和掩模版上的標記(分別代表基片坐標系和掩模坐標系)進入到CCD 對準測量系統中(代表機器坐標系),并基本保證基片坐標系和機器坐標系相一致,以及掩模坐標系和機器坐標系相一致。一般,需制作的微光學元件相對于基片的位置精度要求不高時,可分別采用3 個定位銷釘進行預對準,即基片通過如圖4 所示承片臺上的3 個定位銷釘預對準,掩模版通過圖2 所示的3 個銷釘定位。這兩套銷釘需要在整機裝配時,分別保證它們與機器坐標系(即CCD 測量系統)保持較高的相對位置精度。
(2)第一次移動曝光掩模和基片精對準
首先進行掩模的精對準:通過CCD 測量出掩模坐標系相對于機器坐標系的偏移量,然后通過X -Y精密移動臺的轉角微調裝置實現偏移量的微調,使兩個坐標系調整一致。由于在裝配時已經保證精密移動臺的移動方向和機器坐標系一致,因而通過掩模的精對準后即可間接保證掩模版上的圖形和移動方向一致,從而消除了掩模預對準中存在的方向性誤差。
掩模版精對準后,通過氣壓吸緊掩模版,然后通過調平裝置和間隙分離機構將基片調平并分離間隙,方可進行基片的精對準:利用CCD 對準測量系統檢測并計算出圖3 所示基片上“十”字標記相對于掩模版上X方向上的兩個“方框”標記的偏移量,并通過步進電動機手動微調手輪和精密工件臺的轉角微調裝置將基片坐標系和掩模坐標系調整一致,以直接保證掩模版上的圖形相對于基片有正確的相對位置。
(3)第二次移動曝光的掩模預對準
第一次移動曝光后,第二次移動曝光前,基片保持不動,先將掩模版旋轉90°,然后通過銷釘進行預對準,保證圖3 所示垂直方向的“方框”標記基本轉到水平位置,并進入CCD 測量系統的可觀測范圍。
(4)第二次移動曝光的掩模精對準
掩模版預對準后,通過CCD 對準測量系統使掩模版上這兩個“方框”標記和基片上的“十”字標記進行直接對準,以間接保證掩模版上的圖形和X 向移動方向一致。由于,兩次移動曝光中掩模版上圖形所保持的垂直關系是通過兩次掩模-基片直接對準所保證,因而這個對準過程實際上是一個間接對準過程。
2 CCD 對準系統設計
2.1 CCD 對準系統組成
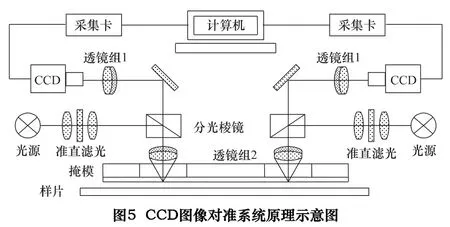
CCD 圖象對準測量系統由兩支完全相同且相互獨立的光路組成,如圖5 所示。在單支對準測量的光路圖中,燈源(50 W 鹵素燈)發出的光束經準直透鏡組、濾光片(濾除燈源可使光刻膠感光的成分)、分光鏡及透鏡組2 后,照明掩模和基片上的標記。透鏡組2 焦深大,即便掩模和基片分離一定的間隙后,在CCD上仍能得到清晰的十字(基片上的對準標記)和方形(掩模的對準標記)。采集卡將CCD 采集到的數據送入計算機,計算機對標記數據進行序列求和濾波等算法處理,計算出X、Y、θ 的偏差,從而可以手動調節基片和掩模的相對位置。屏幕不但可以顯示標記圖象的對準情況(圖6),還可以數據形式實時記錄掩模和基片的相對位置。粗對準可依靠屏幕圖象實現,精對準依靠采樣數據實現,消除了采用雙目顯微鏡人工對準中系統中的人為因素影響。
2.2 掩模坐標系和基片坐標系相對位置的計算
CCD 采集到的基片與掩模標記圖像的數據經過計算機圖像處理和數據分析后,可以得到掩模左右標記和基片左右標記的中心坐標,設分別為(XM1,YM1)、(XM2,YM2)、(XW1,YW1)、(XW2,YW2),則有:
掩模坐標系相對基片坐標系的X 方向偏移量

掩模坐標系相對基片坐標系的Y 方向偏移量

掩模坐標系相對基片坐標系的偏轉角度

2.3 對準誤差來源
對準誤差主要源于光路的測量分辨力、圖像處理的算法、標記制作誤差、掩模與基片的不平行度、工件臺調節靈敏度等,其中測量分辨力對對準精度的影響最大,要求其產生的誤差不超過對準精度所允許誤差的1/3。
設CCD 的面積為a×b mm2,象素為c×d,透鏡組1 倍率為A,透鏡組2 倍率為B,則光路X 向測量分辨力為:

光路Y 向測量分辨力為:

采用CCD 靶面4.8 mm ×3.6 mm,像素數768 ×576,標記圖像經透鏡組2 和透鏡組1 光學系統共放大20 倍,則視場為X 方向4 800/20=240 μm,光路測量分辨力為240/768=0.312 5 μm;視場為Y 方向3 600/20=180 μm,光路測量分辨力為180/576=0.312 5 μm。均小于對準精度所允許誤差的1/3,可以滿足設計對準精度1μm 要求。
當然,透鏡組2 和透鏡組1 倍率越大則測量分辨力越高,但測量范圍越小。
3 結語
本文介紹了基于接近式光刻機的掩模移動曝光原理,提出一種制作連續浮雕微光學元件曝光系統的CCD 視頻圖像對準方案。該方案可以獲得優于1 μm的對準精度,且對準精度不會因人而異,無目視對準的視差,工作更為方便、易升級為自動對準。
[1]董小春,杜春雷,潘麗.微透鏡列陣浮雕深度控制的新方法[J].光電工程,2003,30(4):1 -3.
[2]張凱華.基于移動掩模技術的微透鏡陣列的制作及其面形控制[D].長春:長春理工大學,2012.
[3]董小春.大浮雕深度、非球面微列陣微光學元件面型控制技術研究[D].北京:中國科學院研究生院,2003.
[4]周輝,楊海峰.光刻與微納制造技術的研究現狀及展望[J].微納電子技術,2012,49(9):613 -618.
[5]李金龍,趙立新,胡松,等.雙工件臺光刻機中的調平調焦技術[J].微納電子技術,2010,47(08):494 -498.
[6]朱江平,胡松,于軍勝,等.光刻對準中掩模光柵標記成像標定方法[J].中國激光,2013,40(01):187 -191.
[7]周紹林,唐小萍,胡松,等,納米光刻對準方法及其原理[J].微納電子技術,2008,45(04):222 -230.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32