被動(dòng)微波-紅外雙模復(fù)合制導(dǎo)交班誤差分析
2015-04-24 07:31:02樊鵬飛歐陽中輝
艦船電子對(duì)抗 2015年1期
樊鵬飛,歐陽中輝
(海軍航空工程學(xué)院,煙臺(tái) 264001)
?
被動(dòng)微波-紅外雙模復(fù)合制導(dǎo)交班誤差分析
樊鵬飛,歐陽中輝
(海軍航空工程學(xué)院,煙臺(tái) 264001)
針對(duì)艦空導(dǎo)彈采用雙模復(fù)合制導(dǎo)導(dǎo)引頭的特點(diǎn),介紹了旋轉(zhuǎn)式相位干涉儀的測(cè)角原理和紅外玫瑰掃描跟蹤目標(biāo)的實(shí)現(xiàn)方法;在分析艦空導(dǎo)彈交班流程的基礎(chǔ)上,對(duì)被動(dòng)微波/紅外制導(dǎo)交班誤差進(jìn)行了分類和計(jì)算,分析求解出導(dǎo)彈交班總誤差;通過實(shí)例仿真,討論了各誤差源對(duì)交班誤差的影響。仿真結(jié)果可為艦空導(dǎo)彈復(fù)合制導(dǎo)交班及導(dǎo)引頭設(shè)計(jì)提供參考。
復(fù)合制導(dǎo);交班;誤差分析;艦空導(dǎo)彈
0 引 言
現(xiàn)代海戰(zhàn)場(chǎng)環(huán)境復(fù)雜多變,反艦導(dǎo)彈突防技術(shù)日益進(jìn)步,艦空導(dǎo)彈所面臨的威脅層出不窮。隨著打擊距離的增加和復(fù)雜條件下抗干擾要求的不斷提高,具有較強(qiáng)抗干擾能力的多模復(fù)合制導(dǎo)技術(shù)是艦空導(dǎo)彈制導(dǎo)系統(tǒng)發(fā)展的必然趨勢(shì)[1]。采用被動(dòng)微波/紅外雙模復(fù)合制導(dǎo)的艦空導(dǎo)彈,能夠探測(cè)和跟蹤反艦導(dǎo)彈的微波輻射信號(hào)和紅外輻射信號(hào)。被動(dòng)微波制導(dǎo)體制可以有效增大導(dǎo)彈的探測(cè)距離,但也存在著殺傷概率低、脫靶量大的缺點(diǎn),因此在末制導(dǎo)中使用紅外制導(dǎo)體制以保證艦空導(dǎo)彈有較高的制導(dǎo)精度。在被動(dòng)微波子系統(tǒng)引導(dǎo)紅外子系統(tǒng)截獲目標(biāo)的過程中,不可避免涉及到交班問題,能否順利交班與復(fù)合導(dǎo)引頭的誤差密切相關(guān),因此對(duì)雙模復(fù)合制導(dǎo)交班誤差的分析研究顯得十分必要。
1 復(fù)合導(dǎo)引頭信號(hào)獲取機(jī)理分析
1.1 旋轉(zhuǎn)式相位干涉儀測(cè)角原理
艦空導(dǎo)彈被動(dòng)微波子系統(tǒng)采用旋轉(zhuǎn)式相位干涉儀測(cè)角體制,旋轉(zhuǎn)式相位干涉儀測(cè)角原理如圖1所示。在被動(dòng)雷達(dá)測(cè)角中相位干涉儀是較常用的一種角度測(cè)量方法,其基本原理是通過鑒別不同天線接收到的平面電磁波信號(hào)的相位差,然后經(jīng)過角度變換計(jì)算出目標(biāo)輻射源的視線角。目標(biāo)輻射源的平面波由與天線視軸夾角為β方向傳播而來,它到達(dá)2個(gè)天線會(huì)有相位差φ,該相位差φ與天線視軸夾角β成比例,相位干涉儀利用導(dǎo)彈自身的旋轉(zhuǎn)使角度信息轉(zhuǎn)換為彈體旋轉(zhuǎn)頻率的交流幅度與相位信息,解決了測(cè)角模糊問題,這就是被動(dòng)微波測(cè)角的原理[2]。

圖1 旋轉(zhuǎn)式相位干涉儀測(cè)角原理圖
1.2 紅外玫瑰掃描跟蹤原理
艦空導(dǎo)彈導(dǎo)引頭紅外子系統(tǒng)主要由光學(xué)系統(tǒng)、探測(cè)器、位標(biāo)器組件及二馬達(dá)等組成,采用玫瑰線掃描方式將視場(chǎng)內(nèi)的紅外輻射場(chǎng)景掃描成相應(yīng)的脈沖。導(dǎo)引頭紅外子系統(tǒng)利用其光學(xué)系統(tǒng)實(shí)現(xiàn)玫瑰線掃描,光學(xué)系統(tǒng)如圖2所示。
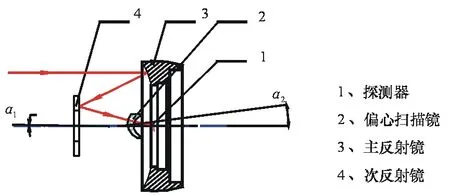
圖2 紅外導(dǎo)引頭光學(xué)系統(tǒng)示意圖
玫瑰掃描光學(xué)系統(tǒng)中的次鏡相對(duì)主鏡有一定的偏轉(zhuǎn),形成圓掃描,然后再通過反向旋轉(zhuǎn)的偏心鏡使目標(biāo)像點(diǎn)在探測(cè)器所在平面上形成玫瑰掃描圖案。目標(biāo)在掃描場(chǎng)中的位置不同,光軸掃過目標(biāo)的次數(shù)就不同,探測(cè)器產(chǎn)生的脈沖數(shù)也不同。測(cè)量信息脈沖和基準(zhǔn)之間的時(shí)間間隔,經(jīng)過計(jì)算即可得到偏離光軸的距離和方位。
紅外導(dǎo)引頭采用新的光機(jī)掃描技術(shù),用一個(gè)小的瞬時(shí)視場(chǎng)通過掃描獲得一個(gè)大的捕獲視場(chǎng)(如圖3所示),解決了視場(chǎng)大小與背景噪聲的矛盾[3]。

圖3 紅外導(dǎo)引頭視場(chǎng)示意圖
2 交班誤差源分類與計(jì)算方法
根據(jù)上述對(duì)導(dǎo)引頭測(cè)角定向原理的分析可知,在微波子系統(tǒng)引導(dǎo)紅外子系統(tǒng)截獲目標(biāo)的過程中,其實(shí)質(zhì)是相位干涉儀輸出的目標(biāo)視線角信號(hào)驅(qū)動(dòng)陀螺指向目標(biāo),隨動(dòng)同步信號(hào)使紅外導(dǎo)引頭光軸與微波天線軸同向,從而確保目標(biāo)位于紅外系統(tǒng)的瞬時(shí)視場(chǎng)內(nèi),以實(shí)現(xiàn)紅外導(dǎo)引頭對(duì)目標(biāo)的截獲跟蹤。引起交班誤差的誤差源主要有以下幾種:(1)旋轉(zhuǎn)相位干涉儀測(cè)角誤差;(2)陀螺角跟蹤回路誤差;(3)紅外導(dǎo)引頭自身誤差;(4)指令時(shí)延誤差;(5)跟蹤點(diǎn)不一致誤差等。
2.1 旋轉(zhuǎn)相位干涉儀測(cè)角誤差
如圖1所示,目標(biāo)輻射方向與天線視軸方向夾角為β,計(jì)算得到輻射源到達(dá)2個(gè)天線的相位差為:
(1)
式中:D為天線間距;λ為輻射源的波長(zhǎng)。
D和λ均可精確測(cè)定。若相位差φ也為已知,即可通過式(1)求得目標(biāo)與天線視軸夾角β為:
(2)
對(duì)式(2)進(jìn)行微分可以求得:
(3)
由式(3)可得:
(4)
式中:σβ為測(cè)量目標(biāo)與天線視軸夾角β的誤差;σφ為干涉儀測(cè)量信號(hào)相位差φ的誤差;σλ為測(cè)量信號(hào)波長(zhǎng)λ的誤差;σD為測(cè)量天線間距D的誤差。
分析式(4)可以得出以下結(jié)論:(1)由于λ和D已知并且測(cè)量較為精確,所以測(cè)角精度主要取決于φ的測(cè)量精度;(2)φ的測(cè)量誤差越大,旋轉(zhuǎn)相位干涉儀測(cè)角誤差越大;(3)天線間距D越大,測(cè)角誤差越小;(4)測(cè)角誤差與夾角β有關(guān)。下面著重對(duì)φ的測(cè)量誤差進(jìn)行分析。在相位干涉儀測(cè)角系統(tǒng)中,接收到的信號(hào)在設(shè)備中經(jīng)過各個(gè)環(huán)節(jié)都會(huì)引入附加相移[4]。導(dǎo)致相位誤差存在的原因有很多,主要包括天線饋電設(shè)計(jì)誤差σ1(其中天線引入的系統(tǒng)誤差主要來源于三方面:一是由匹配網(wǎng)絡(luò)相移不一致導(dǎo)致的誤差σ11,二是由匹配網(wǎng)絡(luò)造成天線相位特性畸變誤差σ12,三是天線結(jié)構(gòu)設(shè)計(jì)中的缺陷誤差σ12);由2個(gè)信道之間固有的相位差和溫度等原因?qū)е碌男诺啦痪庹`差σ2;因鑒相器線性范圍較小導(dǎo)致的比相誤差σ3;式(2)產(chǎn)生的角度變換誤差σ4等。假設(shè)各誤差相互獨(dú)立,則相位差φ的總均方根誤差可表示為:
(5)
在不考慮波長(zhǎng)λ和天線間距D的測(cè)量誤差的情況下,旋轉(zhuǎn)相位干涉儀測(cè)角誤差σβ可簡(jiǎn)化為:
(6)
2.2 陀螺角跟蹤回路誤差
陀螺角跟蹤系統(tǒng)一般由位標(biāo)器、跟蹤電路和伺服機(jī)構(gòu)組成,當(dāng)目標(biāo)相對(duì)跟蹤系統(tǒng)移動(dòng)并改變其位置時(shí),跟蹤系統(tǒng)根據(jù)目標(biāo)視線角度信息輸出光軸角度信息,此時(shí)角誤差亦即光軸與視線的夾角[5]。陀螺角跟蹤回路誤差表現(xiàn)為回路實(shí)時(shí)性誤差,與輸入輸出信號(hào)、位標(biāo)器提供的調(diào)制信號(hào)質(zhì)量及伺服回路的響應(yīng)特性有關(guān)。位標(biāo)器與跟蹤電路的時(shí)間常數(shù)遠(yuǎn)小于伺服機(jī)構(gòu)的時(shí)間常數(shù),在分析時(shí)可以忽略其影響。根據(jù)文獻(xiàn)[6]的分析,陀螺角跟蹤回路誤差與系統(tǒng)回路時(shí)間常數(shù)及目標(biāo)視線角旋轉(zhuǎn)角速度成正比,而一個(gè)系統(tǒng)的時(shí)間常數(shù)一般是一定的,所以陀螺角跟蹤回路誤差主要與目標(biāo)視線角速度有關(guān):
(7)

2.3 紅外導(dǎo)引頭自身誤差
假設(shè)各誤差相互獨(dú)立,則紅外導(dǎo)引頭自身誤差可以表示為:
(8)
2.4 指令時(shí)延誤差
通信系統(tǒng)的數(shù)據(jù)處理和傳輸以及導(dǎo)彈修正指令的產(chǎn)生往往具有滯后性,如果此時(shí)導(dǎo)彈正處于雙模交班階段,指令滯后時(shí)間則決定了導(dǎo)引頭指向誤差的大小。
為了便于分析,設(shè)導(dǎo)彈與目標(biāo)位于同一平面內(nèi)運(yùn)動(dòng),對(duì)于不在同一平面內(nèi)的情況可取導(dǎo)彈與目標(biāo)在此平面內(nèi)的運(yùn)動(dòng)參數(shù)分量。設(shè)制導(dǎo)雷達(dá)在t時(shí)刻測(cè)得目標(biāo)位置為T1,目標(biāo)位置指令延遲Δt時(shí)間后送出,此時(shí)目標(biāo)已飛至點(diǎn)T2,設(shè)在目標(biāo)位置指令送出時(shí)導(dǎo)彈位于M點(diǎn),T1′、T2′是目標(biāo)位置T1、T2在通過M點(diǎn)作出的與目標(biāo)飛行方向平行直線MX上的投影,如圖4所示。
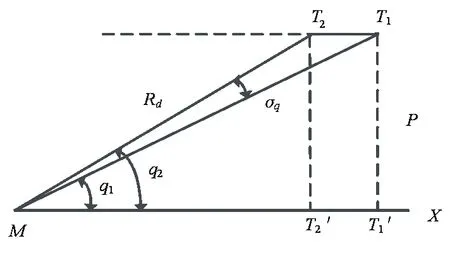
圖4 指令延時(shí)導(dǎo)致的導(dǎo)引頭指向誤差
從圖4可以看出,T1,T2點(diǎn)與導(dǎo)彈M點(diǎn)連線T1M和T2M之間的夾角σq即為指令延時(shí)導(dǎo)致的導(dǎo)引頭指向誤差。不考慮機(jī)動(dòng)情況,在目標(biāo)作等速直線飛行條件下,由幾何關(guān)系計(jì)算得到T2M與MX的夾角q2,T1M與MX的夾角q1的表達(dá)式為:
(9)
(10)
式中:P為在t+Δt時(shí)刻導(dǎo)彈所處位置M距目標(biāo)航線T1T2的距離;Rd為t+Δt時(shí)刻彈目實(shí)際距離,此處取Rd為紅外導(dǎo)引頭的作用距離,即在指令送出時(shí)刻導(dǎo)彈正好處于交班階段;vm為目標(biāo)飛行速度。
因此,指令延時(shí)導(dǎo)致的導(dǎo)引頭指向誤差σq可以表示為[8]:
σq=q2-q1
(11)
2.5 跟蹤點(diǎn)不一致誤差
艦空導(dǎo)彈的攔截目標(biāo)一般為反艦導(dǎo)彈,在雙模復(fù)合制導(dǎo)交班過程中,被動(dòng)微波子系統(tǒng)的跟蹤點(diǎn)是位于反艦導(dǎo)彈頭部的主動(dòng)雷達(dá),紅外子系統(tǒng)的跟蹤點(diǎn)是位于反艦導(dǎo)彈尾部的平均輻射中心,則在交班過程中會(huì)產(chǎn)生由復(fù)合導(dǎo)引頭跟蹤點(diǎn)不一致導(dǎo)致的誤差[9]。根據(jù)圖5所示的幾何關(guān)系,求出此誤差為:
(12)
式中:L為反艦導(dǎo)彈長(zhǎng)度。
分析式(12),可知跟蹤點(diǎn)不一致誤差隨著彈目距離的接近或者β的增大而增大。

圖5 被動(dòng)微波和紅外跟蹤點(diǎn)示意圖
3 交班總誤差仿真分析
根據(jù)上述對(duì)各交班誤差源計(jì)算方法的分析,假設(shè)各誤差源之間相互獨(dú)立,則可得出交班總誤差為:
(13)

圖6 t=7 s,R=3 000 m時(shí)的交班誤差分布圖
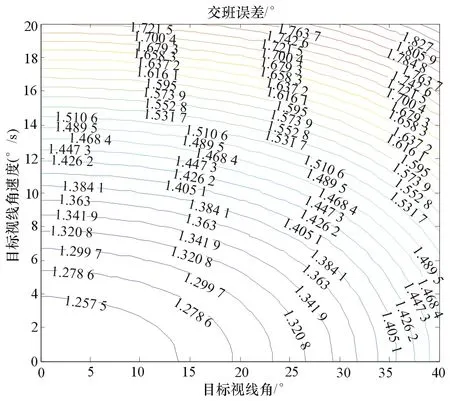
圖7 t=8 s,R=2 000 m時(shí)的交班誤差分布圖
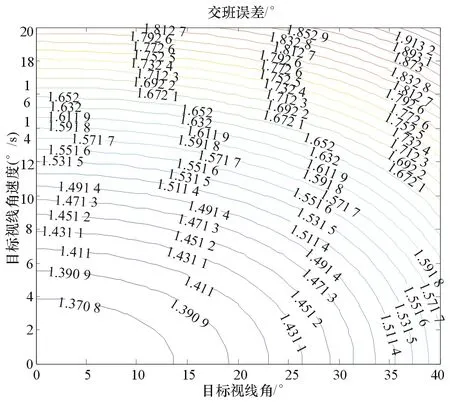
圖8 t=9 s,R=1 000 m時(shí)的交班誤差分布圖
4 結(jié)束語
本文對(duì)被動(dòng)微波/紅外復(fù)合制導(dǎo)的各交班誤差源進(jìn)行了分類和計(jì)算,分析求解出交班總誤差。由上述分析可得出結(jié)論:對(duì)于掃描視場(chǎng)為2.5°×2.5°的紅外導(dǎo)引頭來說,過大的目標(biāo)視線角和目標(biāo)視線角速度導(dǎo)致的誤差對(duì)交班十分不利,這個(gè)問題的解決辦法之一是紅外導(dǎo)引頭可采用玫瑰線掃描方式搜索截獲目標(biāo),用一個(gè)小的瞬時(shí)視場(chǎng)通過掃描獲得一個(gè)大的捕獲視場(chǎng),以降低交班誤差要求。另外,從制導(dǎo)系統(tǒng)角度來看需要導(dǎo)引頭提高交班能力,提高紅外導(dǎo)引頭分辨真實(shí)目標(biāo)脈沖的水平,盡快在最短的時(shí)間內(nèi)轉(zhuǎn)入紅外末制導(dǎo),保證交班后的制導(dǎo)精度。
[1] 劉隆和.多模復(fù)合尋的制導(dǎo)技術(shù)[M].北京:國防工業(yè)
出版社,2001.
[2] 沈康.一種旋轉(zhuǎn)式相位干涉儀測(cè)角系統(tǒng)研究[J].現(xiàn)代電子技術(shù),2011,34(15):26-28.
[3] 葉堯卿.便攜式紅外尋的防空導(dǎo)彈設(shè)計(jì)[M].北京:中國宇航出版社,1996.
[4] 張文旭,司錫才,蔣伊琳.相位干涉儀測(cè)向系統(tǒng)相位誤差研究[J].系統(tǒng)工程與電子技術(shù),2006,28(11):1631- 1632.
[5] 鐘任華,周茂樹,何啟予.飛航導(dǎo)彈紅外導(dǎo)引頭[M].北京:中國宇航出版社,2006.
[6] 彭紹雄,李學(xué)園,袁洪武,等.艦空導(dǎo)彈雙模復(fù)合制導(dǎo)交班誤差模型分析[J].兵工自動(dòng)化,2012,31(2):64- 67.
[7] 胡利偉.防空導(dǎo)彈復(fù)合導(dǎo)引引導(dǎo)誤差與角度截獲問題研究[J].彈箭與制導(dǎo)學(xué)報(bào),2009,29(1):39-42.
[8] 石章松,王航宇,王成飛.指令時(shí)延對(duì)艦空導(dǎo)彈中末制導(dǎo)交班誤差影響分析[J].海軍工程大學(xué)學(xué)報(bào),2009,21(2):28-30.
[9] 任建存,胡利偉.艦空導(dǎo)彈復(fù)合導(dǎo)引頭誤差分析研究[J].現(xiàn)代防御技術(shù),2009,37(1):59-65.
Hand-over Error Analysis of Passive Microwave/Infrared Dual-mode Combined Guidance
FAN Peng-fei,OUYANG Zhong-hui
(Naval Aeronautical and Astronautical University,Yantai 264001,China)
According to the characteristics of dual-mode combined guidance seeker of ship-to-air missile,the angle measuring principle of rotating phase interferometer and realization method of target tracking in infrared rosette scanning are introduced.Based on analyzing the hand-over process of ship-to-air missile,the hand-over error of passive microwave/infrared guidance is classified and calculated,total hand-over error of missile is analyzed and solved.Through example simulation,the influence of each error source on hand-over is discussed.Simulation result can provide reference for the study of hand-over process and seeker design for the combined guidance of ship-to-air missile.
combined guidance;hand-over;error analysis;ship-to-air missile
2014-08-11
TJ765.3
A
CN32-1413(2015)01-0032-05
10.16426/j.cnki.jcdzdk.2015.01.007