自來水供水廠水泵智能控制
2015-05-15 10:23:15楊江華
電子測試 2015年8期
關鍵詞:系統
楊江華
(珠海水務集團有限公司斗門供水分公司,廣東珠海,519100)
隨著我國經濟的快速發展,用水量不斷增多,這對供水廠提出了新的服務要求。在傳統的水泵管理過程中采取單一的水泵控制,水泵不能進行功能切換,局限性很大,而且水泵在工作的過程中出現的故障率較高。根據新的服務要求,在PID模糊控制理論的指導下,加強自來水公司水泵的智能控制,可實現自來水水廠控制的科學化以及合理化,減少水泵的故障率。
1 實行自來水廠水泵的智能化控制的重要意義
1.1 適應社會發展的需要
水泵在水廠的工作中發揮著十分重要的作用,對水廠本身的建設以及為用戶提供服務的過程中占有十分中國要的地位。傳統自來水廠的人工控制水泵的做法,一方面浪費了大量的人力資源,另一方面也存在著水箱等基礎設施的重復建設,導致了人力物力的極大消耗。傳統的管理方法,落后的管理理念和管理方式已經不再適合社會發展對水廠服務的要求。加強說泵管理的智能化建設,可以增強水廠適應經濟社會發展和人民生活要求能力。
1.2 促進自來水廠可持續發展的需要
近年來不論是工業發展用水的需求以及滿足人們生活的用戶需求都在不斷的劇增。這對自來水廠的服務能力提出了更高的要求。為了滿足經濟發展和居民生活的用水需求,自來水廠在發展的過程中要加強現代技術的應用。模糊PID技術應用到自來水廠的管理得過程中,可以提高自來水廠對水泵的控制能力和管理水平,切實提高自來水廠的實際服務水平和服務質量。
2 PID模糊控制
2.1 模糊控制系統
從本質上而言模糊控制系 統是一種計算即數字控制系統。模糊控制系統的是以計算機控制系統的為基礎,并在此基礎之上發展起來的。
模糊控制系統由模糊控制器,輸入、輸出接口,執行機構,被控制對象以及傳感性構成。真個系統中模糊控制器時主導部分,模糊控制器的控制規則是由計算機系統決定的。在整個系統工作中,計算機對被控制對象進行精確至采集,通過精確至與給定值之間的比較,得出差異信號e,差異信號e使系統的輸入量,同時也要把誤差信號e的精確量轉化為模糊量,誤差信號而得模糊化語言表示可以產生出一個模糊信號e語言集的一個子系統E,通過E和模糊控制規則R根據系統邏輯推理形成規則進行決策,得到模糊控制量U=ER,式中U為一個模糊量。在這過程中,要實現對被控制對象的精確化控制,還需要將模糊量U轉化為精確量u。
2.2 PID控制器結構
目前比較通用的控制規律是在模糊控制系統中控制規律是PlD控制。PID控制器主要是由比例P單元、I積分單元以及D微分單元構成的。通過PID控制器中的Kp、Ki和Kd三個參數的設定。

圖1 變壓調速供水原理圖
3 變壓調速供水原理
變壓調速供水原理如圖1所示。
從圖1我們可以清晰的看出,自來水水廠的流量從Q。減為Q1時,如果在這個過程中采用傳統的恒速泵如揚程升至HB,那么這個過程中段的揚程則是完全不必要的;如果在這個過程中所采用的是恒壓變頻調速泵以維持恒壓H,那么在這個的過程中段的揚程則是無用功,但從以上的分析我們就可以發現,恒壓調速比恒速供水實現了節能。
4 系統設計
4.1 水泵自動控制系統硬件設計
PLC處于智能水泵智能恒壓公說系統中的主導地位。系統內部的傳感器在工作的過程中可以將系統管道所承受的壓力以信號的反射反饋回系統。在PLC模擬量輸入模塊中,通過對系統給定的壓力值與傳感系統反饋的精確值以及起變化呂作為模糊控制器輸入,經PLC查詢模糊控制表得出相應的輸出控制量,輸出控制量會通過模擬量輸出給變頻器,從而實現對變頻器的輸出頻率以及水泵的工作臺數進行有效的控制。在這個過程中PLC對蓄水池的水位檢測是通過超聲波水位計實現的,并且可以通過對電動閥的控制以確保蓄水池有足夠的水量。
系統可以通過壓力傳感器對水泵的壓力數據進行采樣,得到的數據為真實的水壓值,PLC將傳感器傳回的壓力數據與系統設計指定的壓力值進行對比,重耳確認壓力偏差,再通過PLC算法除控制信號,通過變頻器的中介作用,來調整系統中異步電機的轉動速度,從而實現對水泵的實際控制,水泵的出1:3壓力改變,再經過壓力傳感器反饋給PLC,從而達到水壓P的在線調整。
4.2 水泵自動控制系統軟件設計
被控系統具有非線性、時變性、時滯性,且由于噪聲、負載擾動等因數的干擾。因此,難以對被控系統建立起十分精確的數學模型或引起對象數學模型的改變,這樣使得在精度上很難達到要求。采用模糊控制PID算法,可以對這些問題進行有效的解決,它可以避開精確的數學模式的建立,也能達到對被控制對象快速、有效的控制。在系統的設計的過程中為了提高控制的精度,加強系統的響應能力,水壓控制閉環采用模糊控制PID控制策略,根據模糊推理和模糊邏輯運算規則去修改各種控制參數。具體實現如下:根據水壓檢測值和實際值的偏差,包括正偏差和負偏差,根據水壓偏差的大小化分為負大(NB)、負中(NM)、負小(NS)、負零(NO)、正零(PO)、正小(PS)、正中(PM)、正大(PB)8個模糊子集。同樣根據水壓偏差變化大小將其分為負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)7個模糊子集。
經過分析我們可以得出以下結論。當系統水壓出現負偏差,并且負偏差比較大時,而且水壓偏差的辯護方向仍然是負,在這種情況下水壓偏差會朝著變大的方向發展,為了對出現的負大水壓進行控制,使水查偏壓不再繼續加大,控制量的變化取正大。當出現水壓的偏差時負偏差,但是,水壓變化呈現正變化時,系統自身對水壓進行調解,會對水壓偏差進行減少,在這個過程中為了調節水壓,應該取較小的控制了量。當出現負中的水壓偏差時,控制量的變化與出現水壓偏差為負大時一樣。水壓出現負小的偏差時,系統在總體上處于穩定狀態,因此,在這時控制量應該選擇為正中。當水壓正小偏差時,系統本身會自動調節為正小。總之,以上所分析的水壓調節是以維護系統的穩定性作為主要目的的。
4.3 系統的特點
(1)系統在設計的過程中使用PLC作為整個系統的控制核心,提升了系統的穩定性。
(2)與傳統的水泵管理相比該系統在運行的過程中比較平穩,減少了不必要的摩擦,提高了水泵的使用年限。
(3)該系統采用了恒壓供水方法,減少了水廠在建設的過程中在水箱和水塔等基礎設施的建設,實現了資本的節約,也有利于提高水廠的效益。
(4)變頻恒壓供水保護功能齊全,運行可靠,具有故障自診斷等保護功能。
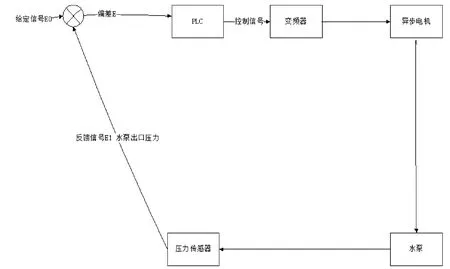
圖2 水壓控制閉環圖
(5)系統可以通過一臺變頻器對多臺水泵進行管理,可以根據用戶的需求,進行合理的調整,滿足用戶的多樣需求。
(6)利用PID系統進行控制,電能的輸出可以根據水量進行調解,實現了能源實用的有效控制。
(7)系統通過計算機進行控制,不需要人力干預,實現了遠程控制。
5 結語
本文對自來水的智能控制進行研究,通過上述分析我們可以得出,實現自來水廠水泵控制的智能化,一方面滿足了社會發展需要對供水的實際需求,提高了自來水廠的實際服務能力,另一方面水廠水泵控制智能化實現了自來水廠自身的發展。自來水廠智能控制一般包括單擊控制策略以及多機模糊控制策略,本文分析的重點為多機模糊控制策略。在這種策略的指導下,可以降低水泵在使用過程中的能耗,符合可持續發發展理念要求,也提高了自來水廠的經營效益,創造了社會效益。
參考文獻
[1]劉洪濤,黃海.PLC應用開發從基礎到實踐[M].北京:電子工業出版社.2007.
[2]賈振興,郭芝政.基于PLC礦井智能化主排水泵的研究[J].山東煤炭科技,2013(3)
[3]余嘩.基于PID模糊調節的水泵智能控制技術[M].高科技與產業化,2010(7).
[4]李焦明,薛平智.智能化節電設備在水泵上的應用[J].中國給水排水,2010(16).
[5]鎖良,方明,王泳.基于PLC的水泵智能控制及能耗監測系統設計[J].合肥工業大學學報(自然科學版),2012(12)
[6]王光生,尹文波,韓洪彬,等. 基于 PLC 的礦井自動排水系統設計[J].自動化應用,2010(2).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
