基于數據驅動的鋰電池隨機動態系統建模
2015-05-28 10:46:54劉曉程王建明
電氣技術 2015年5期
劉曉程 王建明 王 武
(福州大學電氣工程與自動化學院,福州 350108)
隨著經濟的發展,以鋰電池為能源載體的儲能元件逐漸應用在人類生活的方方面面,從手機到筆記本電腦到混合動力汽車和電動汽車,鋰電池受到越來越多的關注與研究[1]。為了對鋰電池進行有效的能量管理,充分利用電能,延長鋰電池壽命,提高系統的安全性和可靠性,就必須對鋰電池進行建模、特性分析與參數估計。傳統的基于模型驅動的鋰電池模型有等效電路模型、電化學模型、神經網絡模型和有限元模型等[2],吸引了諸多專家學者進行研究。文獻[3]中主要針對鋰電池阻抗易受電荷狀態、充放電、電解液均勻性等影響的問題,結合全電阻光譜學的應用建立了鋰電池模型。文獻[4]中主要針對鋰電池等效電路模型的參數估計問題,對鋰電池的有限帶寬特性進行了介紹與分析并建立了相應的模型,提出了一種基于序列二次規劃算法的模型參數估計方法。文獻[5]中主要針對基于模型的鋰電池參數在線實時估計問題中由于頻率響應的限制而導致估計精度下降的問題,提出了基于兩個時間尺度的參數估計方法,分別識別鋰電池不同速度的動態反應過程,與傳統單時間尺度的方法相比其頻率響應更接近真實值。
但是,鋰電池內部化學反應無法直接進行測量、反應過程復雜且易受外界環境影響,具有較強的非線性特性以及測量過程中存在噪聲,因此上述基于模型驅動的機理建模方法存在一定偏差,無法準確建模。針對這一問題,本文根據數據驅動(Data-Driven)的思想,提出了一種基于數據驅動的鋰電池隨機動態系統建模。相對于傳統的基于模型的建模方式,數據驅動的方法僅需要研究系統的在線或者離線數據,通過相應的算法僅依靠實驗數據便可以建立相應的系統模型。文獻[6]中提出了將數據驅動方法如自回歸求和移動平均模型和人工神經網絡用于預測中,并取得了很好的效果。文獻[7]中提出了將數據驅動模型和物理模型結合的方法,并指明不僅要對鋰電池的使用壽命進行準確的預測,而且還要對預測中的不確定性進行定量的分析,其首次將高斯過程回歸(Gaussian Processes Regression,GPR)模型用于鋰電池的預測,但由于效果不佳和相對復雜,只是簡單提到,沒有繼續深入探討和研究。上述文獻主要解決依靠數據驅動的方法進行鋰電池狀態信息預測的問題,其鋰電池模型仍以機理模型為主,并不是完全根據所得數據通過系統辨識得到鋰電池的模型參數。
為了克服傳統基于模型驅動的機理建模的局限性,本文通過鋰電池放電過程的時間序列數據采用EM 算法建立鋰電池的隨機動態模型。利用本文所提算法建立的模型能夠有效的契合實驗數據,能夠保證建模誤差穩定有界。
1 基于EM 算法的鋰電池隨機動態系統建模
1.1 鋰電池隨機動態系統模型
假設鋰電池隨機動態系統模型為帶高斯白噪聲的線性時變離散狀態空間方程,且描述如下:

式中,狀態變量x(k)為n×1 維向量,觀測變量y(k)為n×1 維向量,ω(k)和v(k)分別為零均值的高斯白噪聲過程噪聲序列與測量噪聲序列,A為系統狀態轉移矩陣,C為觀測矩陣。
且ω(k)和v(k)協方差陣為
其中Q,R為均方差陣,δk1為Kronecker 函數。
在提出下文算法之前,定義系統所有待估參數為如下向量:

1.2 EM 算法簡介與推導
EM(最大期望,Expectation Maximization)算法在時間序列模型當中的應用最早由Shumway 和Stoffer[8]于1982年提出,是計算一組參數的極大似然估計的通用迭代方法。實踐證明:利用EM 算法進行參數估計在不同的信號處理應用上均能進行有效的計算[9-10]。
EM 算法在每一次迭代過程中被分成兩步,其中包含一個E 步(期望步,Expectation Step)和一個M 步(極大似然步,Maximum Likelihood Step)。E 步通過觀測數據和當前估計參數,估計完全數據對數似然函數,M 步通過極大化對數似然函數求得一組新的參數估計,所得新的參數估計值用于下一輪E 步的計算,如此循環迭代實現算法。
通過給定的觀測向量Y和當前參數估計值,本文定義完整數據的對數概率密度函數的條件期望如下:

且
式中,C為獨立于θ的常數。
新的參數估計如下:

式中,l為迭代次數。
通過極大化J(θ,θ(l))能夠獲得新的參數估計θ(l+1),即分別對ai,Wi-1和Vi-1求偏導可得新的估計參數為[11]
在給出Kalman 算法之前本文給出如下定義:
且
1)向前遞歸(濾波):取k=1,2,…,m時間更新:

狀態更新:
2)向后遞歸(平滑):取k=m,m-1,…,1
且
2 實驗結果與分析
2.1 實驗結果
本文采用鋰電池的一次放電過程數據進行鋰電池隨機動態模型的構建與參數估計,數據來源于美國愛達荷州國家實驗室對第二代18650 型號的鋰電池進行的生命循環測試,測試在不同的溫度、荷電狀態以及壓力條件下鋰電池充放電過程中的電壓電流等數據[13]。
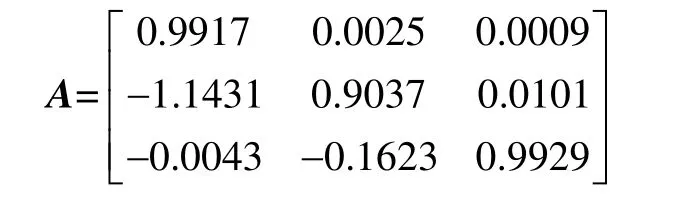
通過本文所提出的算法對鋰電池放電過程結合鋰電池電壓、電流、溫度進行動態建模,可獲得鋰電池模型的狀態轉移矩陣A:
鋰電池模型過程噪聲協方差陣W為
鋰電池模型測量噪聲協方差陣V為

綜上所說,通過本文所提算法能夠有效的獲得鋰電池的隨機動態模型參數。
鋰電池實際放電過程中測量的電壓和電流曲線和通過本文算法建立的隨機動態模型下的鋰電池電壓和電流參數估計曲線如圖1、圖2所示,兩者之間的誤差曲線如圖3和圖4所示。
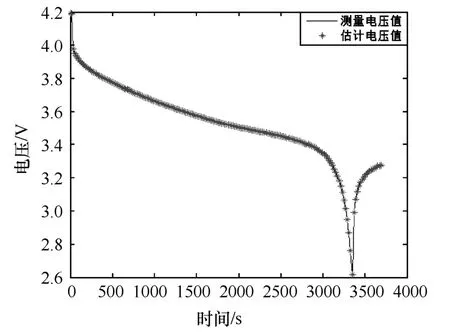
圖1 電壓測量值與模型估計值對比
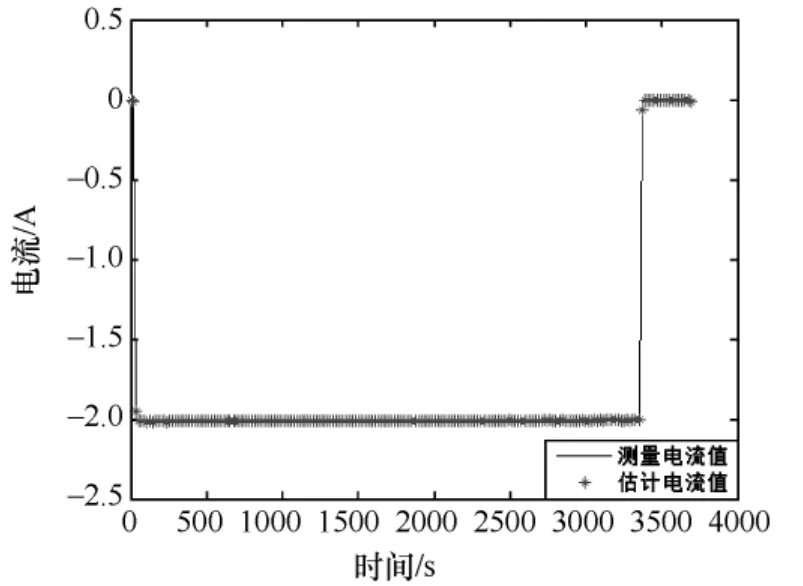
圖2 電流測量值與模型估計值對比
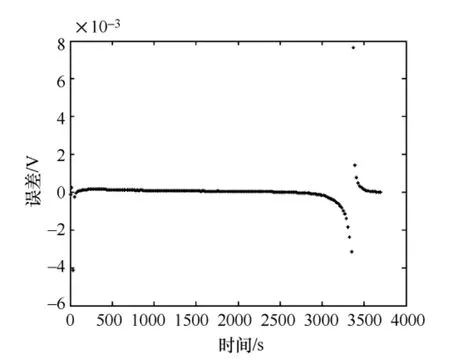
圖3 電壓測量值與模型估計值誤差
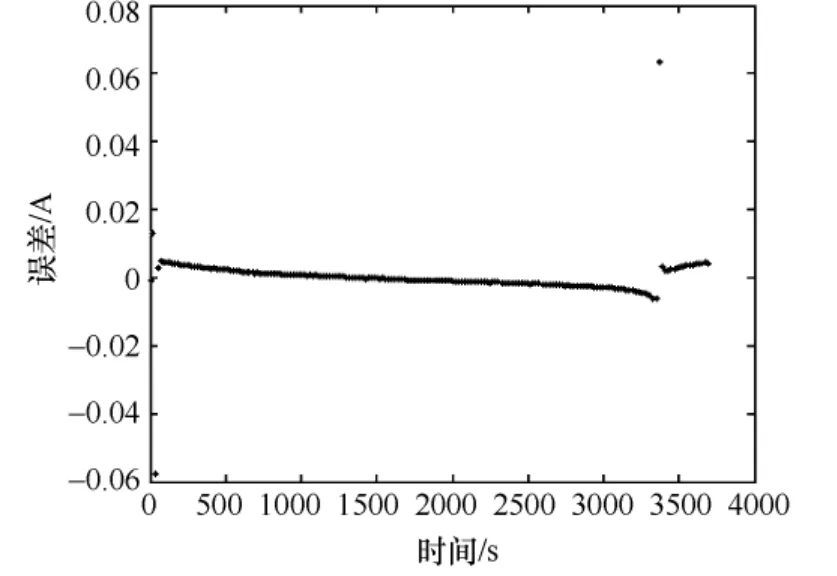
圖4 電流測量值與模型估計值誤差
從圖中可以看出基于EM 算法建立的鋰電池模型能夠很好的估計鋰電池的狀態值且誤差小。
2.2 模型質量分析
從本文所選取的三組實驗數據可得,鋰電池的隨機動態模型的估計協方差W很小,意味著所建的模型能夠很好的契合實驗數據。測量協方差陣V代表測量信號值的質量。
為了驗證本文所提模型的穩定性和魯棒性,需要計算模型狀態轉移矩陣的特征根,其特征根如下:
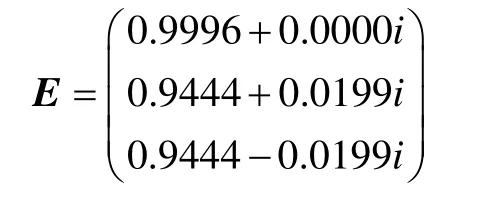
顯然,所有的特征根都在單位圓內,因此本文所建的模型具有良好的穩定性和魯棒性。
3 結論
本文基于鋰電池放電過程的時間序列數據利用EM 算法實現了鋰電池隨機動態模型的構建。通過引入EM 算法,模型參數與電池的狀態能夠被同時識別。通過引入三組鋰電池放電過程時間序列數據證明了本文所提算法的有效性。本文還提出了一些性能指標證明所推導的模型能夠較好的契合實驗數據。本文基于數據驅動的思想建立了鋰電池的隨機動態系統模型,通過所建立的模型能夠較好的估計電池的狀態參數,為鋰電池的建模方式提供了另一種參考。
[1] Saha B,Goebel K.Modeling Li-ion battery capacity depletion in a particle filtering framework[C] Proceedings of the annual conference of the prognostics and health management society.2009: 1-10.
[2] Rao R,Vrudhula S,Rakhmatov D N.Battery modeling for energy aware system design[J].Computer,2003,36(12): 77-87.
[3] Budde-Meiwes H,Kowal J,Sauer D U,et al.Influence of measurement procedure on quality of impedance spectra on lead-acid batteries[J].Journal of Power Sources,2011,196(23): 10415-10423.
[4] Li J,Mazzola M,Gafford J,et al.A new parameter estimation algorithm for an electrical analogue battery model[C] Applied Power Electronics Conference and Exposition (APEC),2012 Twenty-Seventh Annual IEEE.IEEE,2012: 427-433.
[5] Hu Y,Wang Y Y.Two Time-Scaled Battery Model Identification With Application to Battery State Estimation[J]
[6] Kozlowski J D.Electrochemical cell prognostics using online impedance measurements and model-based data fusion techniques[C].Aerospace Conference,2003.Proceedings.2003 IEEE.IEEE,2003,7: 3257-3270.
[7] Goebel K,Saha B,Saxena A,et al.Prognostics in battery health management[J].IEEE instrumentation & measurement magazine,2008,11(4): 33.
[8] Shumway R H,Stoffer D S.An approach to time series smoothing and forecasting using the EM algorithm[J].Journal of time series analysis,1982,3(4): 253-264.
[9] Weinstein E,Oppenheim A V,Feder M,et al.Iterative and sequential algorithms for multisensor signal enhancement[J].Signal Processing,IEEE Transactions on,1994,42(4): 846-859.
[10] Ziskind I,Hertz D.Maximum-likelihood localization of narrow-band autoregressive sources via the EM algorithm[J].Signal Processing,IEEE Transactions on,1993,41(8): 2719-2724.
[11] Wang Z,Yang F,Ho D W C,et al.Stochastic dynamic modeling of short gene expression time-series data[J].NanoBioscience,IEEE Transactions on,2008,7(1): 44-55.
[12] Ghahramani Z,Hinton G E.Parameter estimation for linear dynamical systems[R].Technical Report CRG- TR-96-2,University of Totronto,Dept.of Computer Science,1996.
[13] Saha B,Goebel K,Battery Data Set.http://ti.arc.nasa.gov/ project/prognostic-data-repository.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
