永磁同步電動機的自抗擾控制研究
2015-05-28 10:47:00段小麗張永平任一峰
電氣技術 2015年5期
段小麗 張永平 任一峰
(1.晉中學院機械學院,山西 晉中 030600;2.中北大學計算機與控制工程學院,太原 030051)
永磁同步電動機具有效率高、轉矩慣量小、易于控制等優點,在高性能伺服系統中得到了很廣的應用。DTC 是直接對轉矩和磁鏈進行的控制,它省去了矢量控制繁雜的坐標變化。20 世紀90年代,L.Zhong 等人改造了異步電動機的直接轉矩控制方法,并成功用于PMSM 中,現在已有了相關的研究和仿真,但是直接轉矩控制的低速性能差,轉速超調大、轉矩脈動大、電流畸變嚴重等[1]。
20 世紀70年代,中科院研究員韓京清提出了一種新的非線性控制器—自抗擾控制器。自抗擾控制器吸收了PI 控制的優點和現代控制理論的優勢,它直接觀測并補償控制系統的總擾動(內擾和外擾),不需要精確的被控模型,目前已經在各個領域得到了非常廣泛的使用[2]。本文將PMSM 的直接轉矩控制系統中的PI 用ADRC 代替,解決低速性能差的問題。通過仿真表明,和PI-DTC 的PMSM 控制系統相比較,基于ADRC-DTC 的系統有更為優越的動態性能。
1 永磁同步電動機的直接轉矩控制
1.1 PMSM 的數學模型
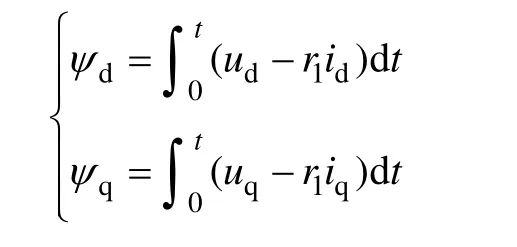
PMSM 直接轉矩控制采用的是定子磁場定向控制方式,對PMSM 的磁鏈和轉矩進行直接控制,根據d-q 坐標系下PMSM 的數學模型,可得到PMSM
的直接轉矩方程[3]:

采用隱極式永磁同步電動機,Ld=Lq。

式中,Ld、Lq分別為定子d、q 軸定子繞組電感;np為極對數;ψs為定子磁鏈;ψf為永磁體基波磁場在定子繞組中生的磁鏈;δ為轉矩角。
1.2 PMSM 的直接轉矩控制
直接轉矩控制方法是磁鏈和轉矩的雙閉環控制。基于DTC 的永磁同步電動機控制系統的基本結構如圖1所示,其工作原理為[4]
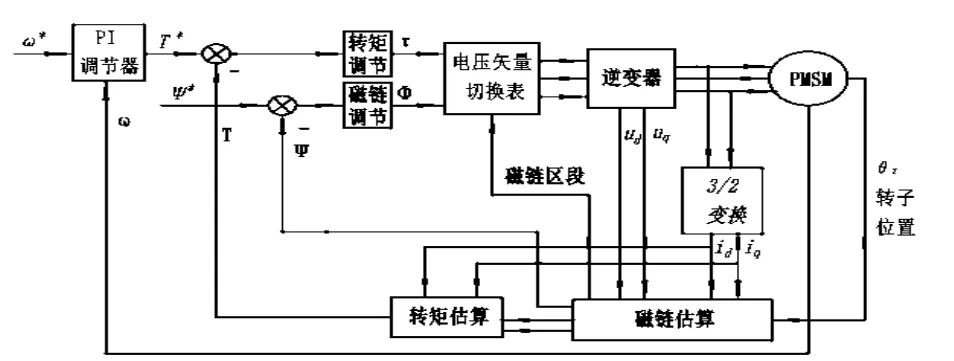
圖1 永磁同步電動機的DTC 控制框圖
通過下式可得磁鏈和轉矩的估算值T和ψ,然后分別和磁鏈和轉矩的給定值比較,把它們的差值,作為磁鏈調節器和轉矩調節器的輸入,轉矩調節和磁鏈調節是滯環比較器。

通過轉矩調節器的輸出τ和磁鏈調節器的輸出φ選擇合適的開關矢量,達到控制PMSM 的目的。
2 PMSM 的ADRC-DTC 的控制系統設計
自抗擾控制器由3 部分組成:跟蹤微分器(TD)、擴張狀態觀測器(ESO)和非線狀態誤差反饋控制器(NLSEF)。TD 的作用是給出過渡過程的微分信號,為了設計的簡潔性,所以在設計 PMSM 的ADRC-DTC 控制系統時,ADRC 中不需要TD,只需要二階ESO 和一階NLSEF。z1(t)是ESO 對n的觀測值,z2(t)是ESO 對系統總擾動(內擾和外擾)的觀測值,反饋量可以補償總擾動,NLSEF 的作用是可以非線性加工和組合各階誤差信號[5]。用自抗擾控制器取代傳統直接轉矩控制系統中的PI 調節器,得到ADRC-DTC 的永磁同步電動機的控制方案如圖2所示。
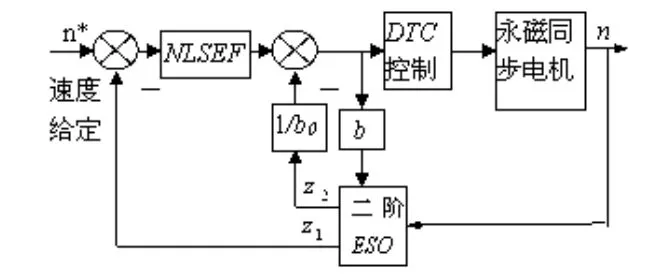
圖2 基于ADRC 的永磁同步電動機DTC 框圖
3 仿真結果及分析
在Matlab/Simulink 環境下構建系統仿真模型如圖3所示。PMSM 參數如下:極對數為2,定子電阻Rs=12.2Ω,Ld=Lq=0.0064H,永磁體磁鏈為0.46Wb。
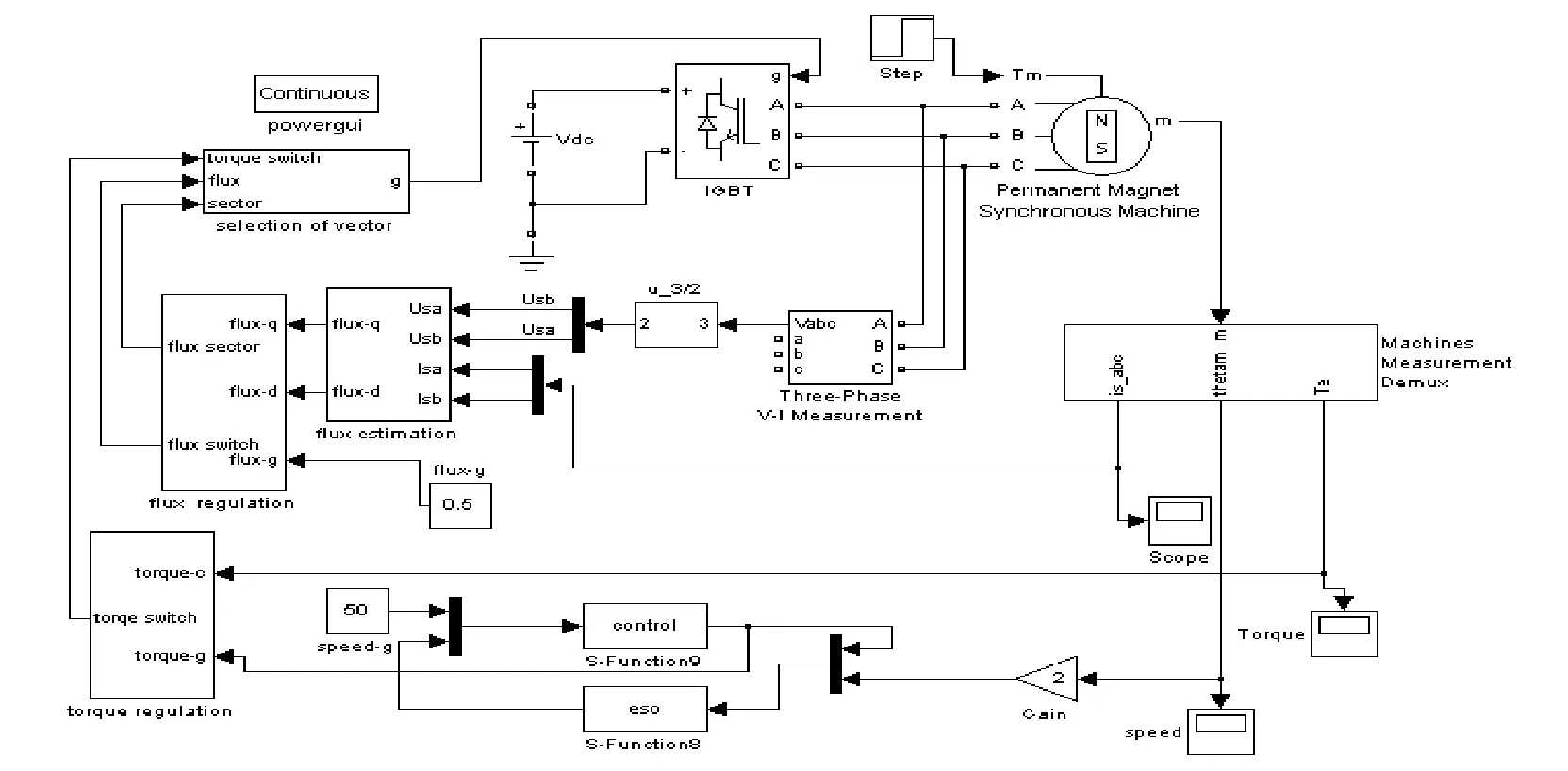
圖3 基于ADRC-DTC 的永磁同步電動機仿真圖
為了看ADRC 的控制效果,分別給出在低速時永磁同步電動機的PI-DTC 和ADRC-DTC 的仿真波形。給定轉速為50r/min,給定轉矩為10N·m。圖4和圖5分別低速狀態下永磁同步電動機的PI-DT和ADRC-DTC 的轉速響應圖,圖6和圖7分別為兩種控制方式的轉矩波形,圖8和圖9分別兩種控制方式的定子a 相電流波形。
從仿真結果可以看出,ADRC 控制的調速系統在低速時轉速動態響應快且無超調,定子電流畸變小,轉矩脈動也小。但是PI 控制的系統在低速時出現明顯的超調,轉矩脈動大,定子電流的畸變也大,可以看出ADRC 的優越的控制性能。
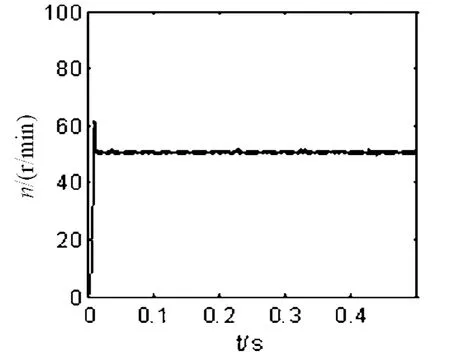
圖4 PI 控制的轉速響應圖
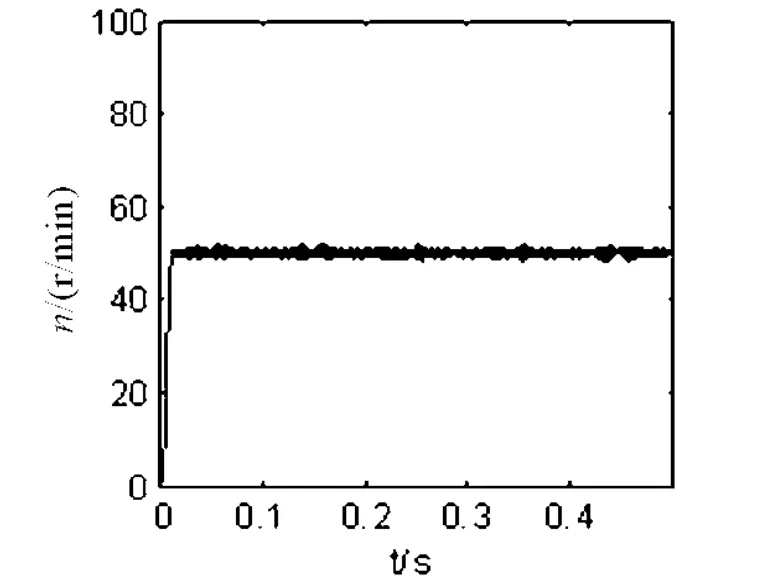
圖5 ADRC 控制的轉速響應
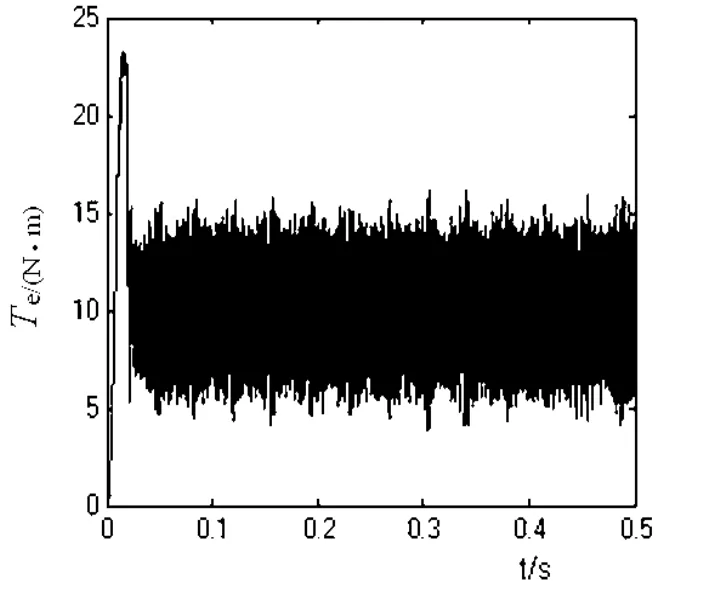
圖6 PI 控制的轉矩波形
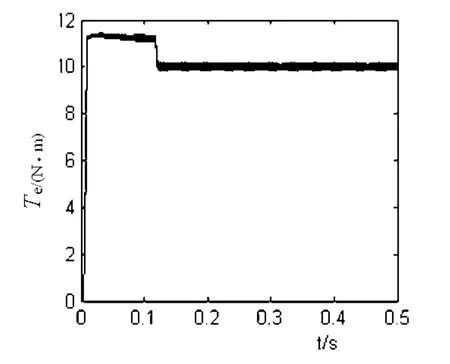
圖7 ADRC 控制的轉矩波形
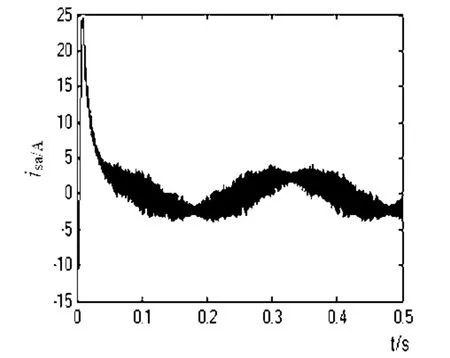
圖8 PI 控制的定子a 相電流波形圖
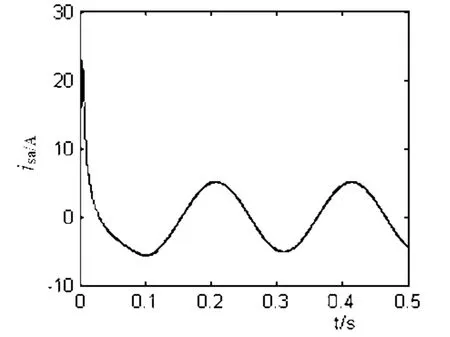
圖9 ADRC 控制的定子a 相電流波形
4 結論
本文將ADRC 應用于PMSM 的直接轉矩控制系統中,首先分析了PMSM 的直接轉矩控制方程和直接轉矩控制的原理,然后利用自抗擾控制技術,設計了ADRC-DTC 的永磁同步電動機的控制系統。仿真結果表明在低速時,基于ARDC-DTC 的控制系統比傳統的直接轉控制系統有很好動、靜態性能,解決了PMSM 傳統的直接轉矩控制系統在低速時控制性能差的問題。
[1] 張淼,黎慶發,陳思哲,等.永磁同步電動機的內模直接控制[J].電氣傳動,2014,44(4): 25-29.
[2] 王超,李世華,田玉平.基于自抗擾技術的永磁同步電動機直接轉矩控制[J].電氣傳動,2007,37(7): 14-17.
[3] 薛樹功,瞿成明,魏利勝.永磁同步電動機自抗擾控制研究[J].安徽工程大學學報,2011,26(4): 44-46.
[4] 劉英培,粟然,梁海平.基于最小二乘支持向量機優化自抗擾控制器的永磁同步電動機直接控制方法[J].中國電動機工程學報,2014,34(27): 4654- 4663.
[5] 韓京清.自抗擾控制技術: 估計補償不確定因素的控制技術[M].北京: 國防工業出版社,2008.
