Buck變換器建模與非線性控制方法研究
2015-05-30 05:11:47劉大偉劉以建
科技創(chuàng)新與應(yīng)用 2015年34期
劉大偉 劉以建


摘 要:分析DC-DC開(kāi)關(guān)變換器建模的實(shí)際方式是研究開(kāi)關(guān)電源的保障,對(duì)于分析和設(shè)計(jì)開(kāi)關(guān)電源具有很大作用。傳統(tǒng)模型與實(shí)際電路之間存在一定偏差是設(shè)計(jì)開(kāi)關(guān)變換器中重要的問(wèn)題。以此,文章分析了DC-DC開(kāi)關(guān)變化器的建模,可以在一定程度上促進(jìn)優(yōu)化開(kāi)關(guān)電源的性能以及提高設(shè)計(jì)效率。
關(guān)鍵詞:直流-直流變換器;建模分析;PID控制;非線性控制
1 DC-DC概述
在電路基礎(chǔ)波形工作的前提下,充分研究DC-DC變換器,電子設(shè)備中,一次電源就是整流器,二次電源就是DC-DC變換器。二次電源可以用來(lái)把振幅、頻率等不可調(diào)方式下的直流振幅轉(zhuǎn)變?yōu)榭烧{(diào)的振幅、頻率直流電壓,上述過(guò)程可以很好地增加輸出電能功率因數(shù),所以,也可以叫做功率因數(shù)變換器。依據(jù)輸入輸出是否存在隔離,可以把DC-DC變換器分為兩種,隔離式和不隔離式;不隔離直流變換器依據(jù)具有的開(kāi)關(guān)個(gè)數(shù)可以分為三類,雙管、單管、四管,其中單管可以分為六種,包括Buck變換器、Buck-Boost變換器、Boost變換器、Cuk變換器、Zeta變換器、Sepic變換器,文章主要研究Buck變換器建模與非線性控制方法[1]。
2 Buck變換器建模的方法
DC-DC變換器建模方式具有很多種方式,其中比較常用的就是小信號(hào)建模法、狀態(tài)空間平均法、電路平均法、大信號(hào)建模法。狀態(tài)空間平均法就是從DC-DC開(kāi)關(guān)變換器工作過(guò)程中的所有子拓展結(jié)構(gòu)的實(shí)際狀態(tài)護(hù)法,利用時(shí)間來(lái)加權(quán)平均處理,以此可以得到統(tǒng)一的原電路狀態(tài)方程,利用線性化和小信號(hào)擾動(dòng)來(lái)處理,得到等效電路模型。相比較原來(lái)方式,這種方式不是十分容易理解,并且具體有不同的斷續(xù)和連續(xù)導(dǎo)通模式。電路平均法實(shí)際上就是依據(jù)電路結(jié)構(gòu)為基礎(chǔ),通過(guò)時(shí)間平均加權(quán)技術(shù)來(lái)合理分析電路,在不斷增加電路元件以后,需要能夠得到一定拓?fù)浣Y(jié)構(gòu),進(jìn)行大量計(jì)算[2]。
3 基于線性控制方法設(shè)計(jì)Buck變換器控制器
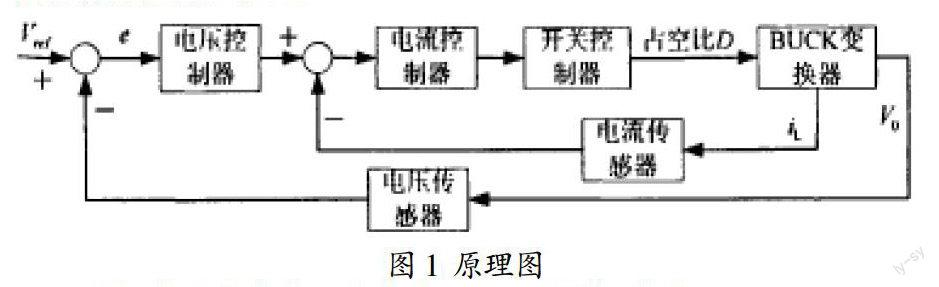
現(xiàn)階段,已經(jīng)被大量運(yùn)用的單閉環(huán)控制方式屬于線性控制,主要就是利用點(diǎn)反饋形成閉環(huán)控制方案,這種方法是設(shè)計(jì)DC-DC變換器中最早使用的一種控制形式,主要就是通過(guò)參考電壓和輸出電壓差值來(lái)設(shè)計(jì)相應(yīng)的線性控制器,然后通過(guò)PWM控制器來(lái)達(dá)到控制開(kāi)關(guān)通斷的目的,最后能夠保證輸出電壓系統(tǒng)具有符合參考的電壓。這種非線性控制是把電壓作為基本反饋量,不能及時(shí)響應(yīng)輸入擾動(dòng),所以,具有比較慢的電路動(dòng)態(tài)反應(yīng)速度,需要具有比較大的超調(diào),會(huì)在一定程度上由于環(huán)路增益來(lái)限制帶寬,出現(xiàn)比較長(zhǎng)的動(dòng)態(tài)時(shí)間,此外,還需要適當(dāng)引入電壓波動(dòng)到電源側(cè),因而使得具有比較低的控制精度,這種方式比較簡(jiǎn)單,很容易控制。
4 基于非線性控制方法設(shè)計(jì)Buck變換器控制器
滑膜控制是一種變結(jié)構(gòu)控制,通過(guò)轉(zhuǎn)換不同結(jié)構(gòu)來(lái)達(dá)到實(shí)現(xiàn)控制系統(tǒng)的目的,主要就是具有不連續(xù)控制的控制特點(diǎn),主要設(shè)計(jì)理論思路就是通過(guò)切換開(kāi)關(guān)系統(tǒng)結(jié)構(gòu),保證可以使系統(tǒng)切線從所有出發(fā)點(diǎn)都可以輸送到預(yù)先設(shè)計(jì)的滑動(dòng)面中,沿著滑動(dòng)面繼續(xù)運(yùn)動(dòng)直到運(yùn)行到穩(wěn)定位置,在實(shí)際建立的過(guò)程中,需要保證傳動(dòng)系統(tǒng)具有一定時(shí)滯性和切換慣性,促使不能確定的運(yùn)行到滑動(dòng)基礎(chǔ)面上,所以,容易導(dǎo)致出現(xiàn)劇烈運(yùn)動(dòng)。以此開(kāi)始大力研究基于更加復(fù)雜方式的控制設(shè)計(jì),以便于可以解決目前滑塊不利于抖動(dòng)的問(wèn)題,具有響應(yīng)速度快特點(diǎn)、并具有比較強(qiáng)的抗干擾能力[3]。(圖2)
經(jīng)過(guò)多年的研究和分析,逐漸發(fā)展出基于非線性控制規(guī)律技術(shù),也就是抗干擾控制技術(shù),具有傳統(tǒng)PID技術(shù)的優(yōu)點(diǎn),可以從根本上提高傳統(tǒng)PID技術(shù)的不足,而形成的新設(shè)計(jì)控制器思路。為了可以有效的提高控制器整體性能,從三方面分析抗干擾控制器:第一,利用跟蹤微分器來(lái)實(shí)時(shí)跟蹤控制系統(tǒng)裝套和各階段微分,避免發(fā)生傳統(tǒng)PID方式中的超調(diào)和響應(yīng)問(wèn)題;第二,利用擴(kuò)張狀態(tài)觀測(cè)器來(lái)有效檢測(cè)綜合擾動(dòng)以及系統(tǒng)狀態(tài);第三,利用非線性狀態(tài)誤差反饋系統(tǒng)來(lái)達(dá)到大誤差小增益、小誤差大增益的控制形式。
5 非線性控制硬件仿真的實(shí)現(xiàn)實(shí)例
依據(jù)上述建模方式上建立Buck電路控制模型,依據(jù)Simulink建立仿真模型。
其中四個(gè)子模塊包括擴(kuò)張狀態(tài)觀測(cè)器、跟蹤微分器、BUCK變換器以及非線性狀態(tài)誤差反饋,依據(jù)3=-c0?孜2-c1(x1-?琢0)2-c2(x2-?琢1)2公式計(jì)算,設(shè)定電路仿真參數(shù)是:C=10uF,L=270mH,額定輸入電壓Vi是8V;額定負(fù)載R=5Ω,參考輸出電壓是4V。在仿真過(guò)程中,首先需要合理的調(diào)整跟蹤微分器參數(shù),并且找到適合的過(guò)度方式,調(diào)整完成以后,不會(huì)受到影響;在合理調(diào)整擴(kuò)張情況下的參數(shù),確保可以迅速找到跟蹤信號(hào),為提取微分和狀態(tài)信號(hào)提供保證,此外,還具有一定系統(tǒng)擾動(dòng)量;有效調(diào)節(jié)非線性反饋參數(shù),確保具有比較理想的系統(tǒng)性能。最后確定仿真系統(tǒng)與實(shí)際數(shù)值,如果進(jìn)入穩(wěn)定區(qū)域,具備比較強(qiáng)的適應(yīng)性。可以發(fā)現(xiàn),自抗擾控制方式對(duì)于抑制負(fù)載電流干擾和電源輸入電壓具有很強(qiáng)能力,能夠很快響應(yīng),雖然會(huì)突然變化負(fù)載和電壓,輸出電壓出現(xiàn)波動(dòng),但是十分微弱,可以在短時(shí)間內(nèi)進(jìn)行恢復(fù),以便于可以證明自抗擾控制器具有一定適應(yīng)性[4]。
6 結(jié)束語(yǔ)
總而言之,現(xiàn)階段,大部分控制技術(shù)都是利用線性組合狀態(tài)變量的方式來(lái)形成滑膜切面,上述方式相對(duì)簡(jiǎn)單,在實(shí)施時(shí)候,還是會(huì)存在缺陷,例如,不可以測(cè)量反饋?zhàn)兞康葐?wèn)題,但是自抗擾控制,在實(shí)施的時(shí)候,自抗擾控制器很難達(dá)到選擇多項(xiàng)參數(shù)的目的,因此,需要在實(shí)際應(yīng)用中合理使用上述兩種控制形式,此外,還可以適當(dāng)結(jié)合其他控制方式,保證具有比較高的效率。
參考文獻(xiàn)
[1]楊國(guó)超.Buck變換器建模與非線性控制方法研究[D].江南大學(xué),2010.
[2]尹慧.BUCK變換器非線性控制方法研究[D].黑龍江科技學(xué)院,2010.
[3]劉冬春.功率變換器的區(qū)域系統(tǒng)建模及控制方法研究[D].重慶大學(xué),2011.
[4]陸治國(guó).無(wú)復(fù)位開(kāi)關(guān)的單周控制新方法研究[J].深圳信息職業(yè)技術(shù)學(xué)院學(xué)報(bào),2010,3(1).
作者簡(jiǎn)介:劉大偉(1989-),男,漢族,江蘇,碩士研究生,上海海事大學(xué),電力電子技術(shù)及裝置。
劉以建(1969-),副教授,上海海事大學(xué)物流工程學(xué)院電氣系副主任,主要從事船舶電氣自動(dòng)化、船舶控制工程與系統(tǒng)仿真技術(shù)、電力電子技術(shù)、電源變換技術(shù)等方面的研究。