智能車賽道類型判斷方法研究
2015-05-30 20:26:49喬衛磊夏玉潔王易鳳陳懷安
中國新通信 2015年12期
喬衛磊 夏玉潔 王易鳳 陳懷安
【摘要】 以全國大學生飛思卡爾智能車競賽為背景,介紹了智能車在賽道類型判斷上常用的三種算法。通過對智能車賽道中心線建立模型,可以提取出賽道的特征信息。利用特征信息就可以對小車的舵機和速度施行控制,使之達到較為準確的轉彎和快速行駛的性能。
【關鍵詞】 智能車 賽道識別 類型判斷
智能車系統以迅猛發展的汽車電子為背景,涵蓋了控制、模式識別、傳感技術、電子、電氣、計算機、機械等多個學科,它主要由路徑識別、角度控制及車速控制等功能模塊組成。競賽攝像頭組的技術要點中,圖像處理和賽道識別這兩個環節尤其重要,其影響到小車的最終控制。由于賽事的難度系數越來越大,賽道類型的準確判斷也成為了一大難題。本文介紹了三種比較成熟的賽道類型判斷方法。
一、兩點求賽道曲率[1]
如圖1所示,設智能車處于賽道中線AB上的A點處,前進方向為賽道中心線的切線方向。在賽道中心線圓弧段的半徑最小值的范圍內取長度L(AB),在A點正前方(縱向)距A點L(AB)距離的B點橫向讀取賽道中心線上C點之間的信息,測出B點和C 點之間的長度為L(BC),AC的中點為D點,賽道中心線圓弧段所在圓的圓心為O點,設此時智能車所處的賽道曲率為k,曲率半徑為R。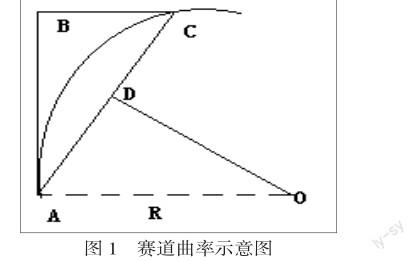
由于AB是賽道中心線所在圓弧段的切線,所以AB與AO垂直,AC為圓上的弦D為AC的中點,由ΔABC與ΔODA 相似,可得:
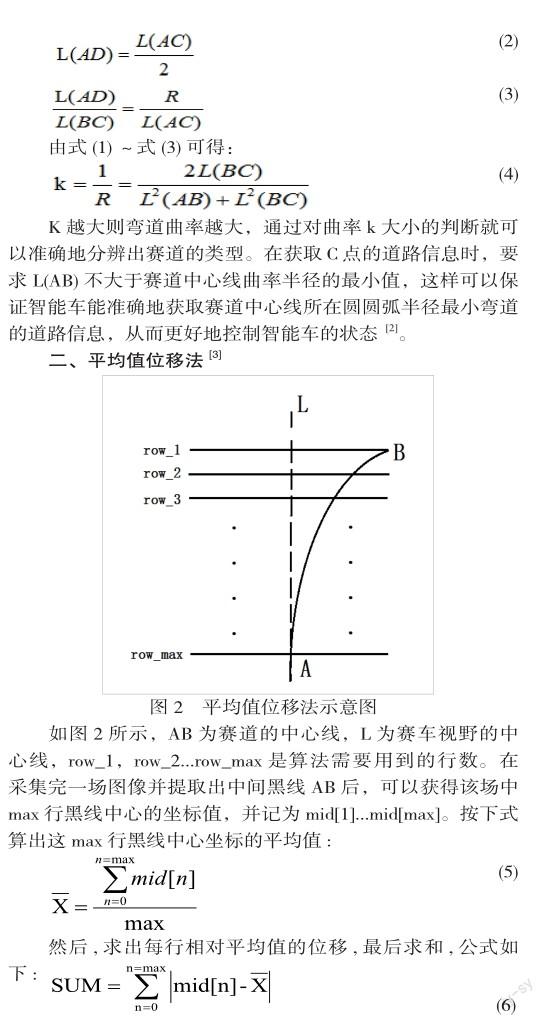
由于SUM越大說明跑道彎曲程度越大, 因此給定SUM一個合適的閾值, 就可以正確識別出跑道當前的彎道程度。實驗表明, 只要閾值取得合適,該算法非常可靠。其中,閾值還可以根據跑道的改變作相應的調整。
三、賽道斜率判斷法
智能車比賽的賽道是由兩條黑色的邊線構成的,在提取出這兩條邊線計算出賽道中心線之后,可以通過測量道路的斜率和車子與道路的偏移來計算偏差,偏移的正負也代表了車子偏向于哪一邊。
式中的b就是AB兩點的斜率。斜率有正負之分,當斜率大于0時,說明為右彎道。同理,當斜率小于0時,為左彎道。若對b取絕對值,則|b|表示彎道的彎曲程度,|b|越大則彎道越彎曲。
四、結論
本文介紹的三種賽道類型判斷方法在實際中均得到了廣泛的應用。每種方法都有其各自優缺點:兩點求賽道曲率法能夠非常準確地判斷出賽道類型,但是算法復雜,運算量大,計算時間時長,不利于智能車的快速反應;平均值位移法算法簡介明了,計算量小,但是在復雜的賽道判斷時,誤差較大,有時會出現錯判;斜率判斷法,運算量介于上述兩種方法之間,計算也較為簡單,判斷正確率較高。
在智能車的制作過程中,要實現準確的控制,賽道類型的判斷是極為重要的一步。只有經過不斷的試驗和調整才能夠選出最適合的判斷方法,從而達到使智能車進行快速反應、精確控制和穩定運行的目的。
參 考 文 獻
[1] 蔣 旭,吳 濤.兩點算法求智能車賽道曲率.新技術新工,2014,04.
[2] 劉進,齊曉慧,李永科.智能車大角度彎道轉向曲率連續的軌跡規劃方法.中國機械工程,2014.02.026
[3] 許 寰,魯五一,趙治平.攝像頭路徑識別和小車控制策略.計算機工程與科學,2009,31(5):110-115.
[4] 劉嘉豪,劉海剛,張建偉,關天.智能車圖像處理與識別算法研.工業控制計算,2014,08.
[5] 賈小勇,徐傳勝,白欣.最小二乘法的創立及其思想方法,西北大學學報(自然科學版),2006,06.