基于慣量辨識PI自整定永磁伺服電機控制
2015-06-01 10:45:40馬立新范洪成徐鎮乾黃陽龍周尚珺璽
電力科學與工程 2015年9期
關鍵詞:系統
馬立新, 范洪成, 徐鎮乾,黃陽龍,周尚珺璽
(上海理工大學 光電信息與計算機工程學院,上海200093)
基于慣量辨識PI自整定永磁伺服電機控制
馬立新, 范洪成, 徐鎮乾,黃陽龍,周尚珺璽
(上海理工大學 光電信息與計算機工程學院,上海200093)
針對傳統PID控制存在的缺陷以及永磁同步電機運行中慣量變化問題,提出了永磁伺服電機慣量辨識PI自整定控制方法。測定電機在勻加速過程中不同時刻轉速值,通過轉動慣量辨識算法得出轉動慣量大小,分析轉動慣量與速度環中的參數關系來自動整定控制參數。利用MATLAB工具建立系統仿真模型,并與傳統PID控制進行了對比,結果表明:慣量辨識PI自整定控制方法實現了啟動高速化、無超調及強抗干擾能力,具有很好的動靜態性能,能廣泛應用在高精度控制系統中,對解決慣量易變系統提供了一種控制依據。
永磁同步電機;慣量辨識;PI自整定
0 引言
目前,隨著稀土永磁材料的誕生,永磁同步電機(PMSM)[1]在伺服系統的應用越來越廣泛,大量的工業生產都以PMSM作為驅動電機,如高性能機器人、數控機床、礦山機械等[2]。PMSM經過長時間運行以及干擾噪聲等因素的影響,導致電機參數發生變化,控制效果達不到工業標準。其中參數發生變化的一個主要原因是電機轉動慣量的變化[3]。轉動慣量過大會導致電機運行不穩定,響應速度慢。轉動慣量過小,雖然系統響應速度加快,但同時會導致超調量變大,產生震蕩。
傳統的PMSM控制策略采用的是PID控制,其中PID控制中比例、積分、微分三個參數值與電機自身的參數關聯緊密,而電機運行中參數是時變的,所以參數辨識對電機的控制十分關鍵。
采用慣量辨識PI自整定永磁伺服電機控制策略,即測定電機在勻加速時4個不同時刻轉速值,通過電機在d、q坐標系下的電磁轉矩和機械方程得出轉動慣量大小,根據轉動慣量的大小對速度環進行自動整定[4]。與傳統PID控制進行對比,仿真結果表明該方法使系統具有更好的動靜態性能。
1 永磁同步電機坐標變換及其數學模型
1.1 永磁同步電機坐標變換
永磁同步電機原始模型復雜,通過坐標變換,簡化電機矢量結構。坐標變換公式如下:
三相-兩相變換:即三相繞組A、B、C和兩相繞組α、β之間的變換,簡稱3/2變換。
(1)
靜止兩相-旋轉正交變換:即從靜止兩相正交坐標系α、β到旋轉正交坐標系d、q的變換,簡稱2s/2r變換。
(2)
式中:θ表示d軸與A軸之間的夾角。
1.2 永磁同步電機數學模型
圖1為兩級貼面式永磁同步電機空間矢量圖,其基本方程如下:
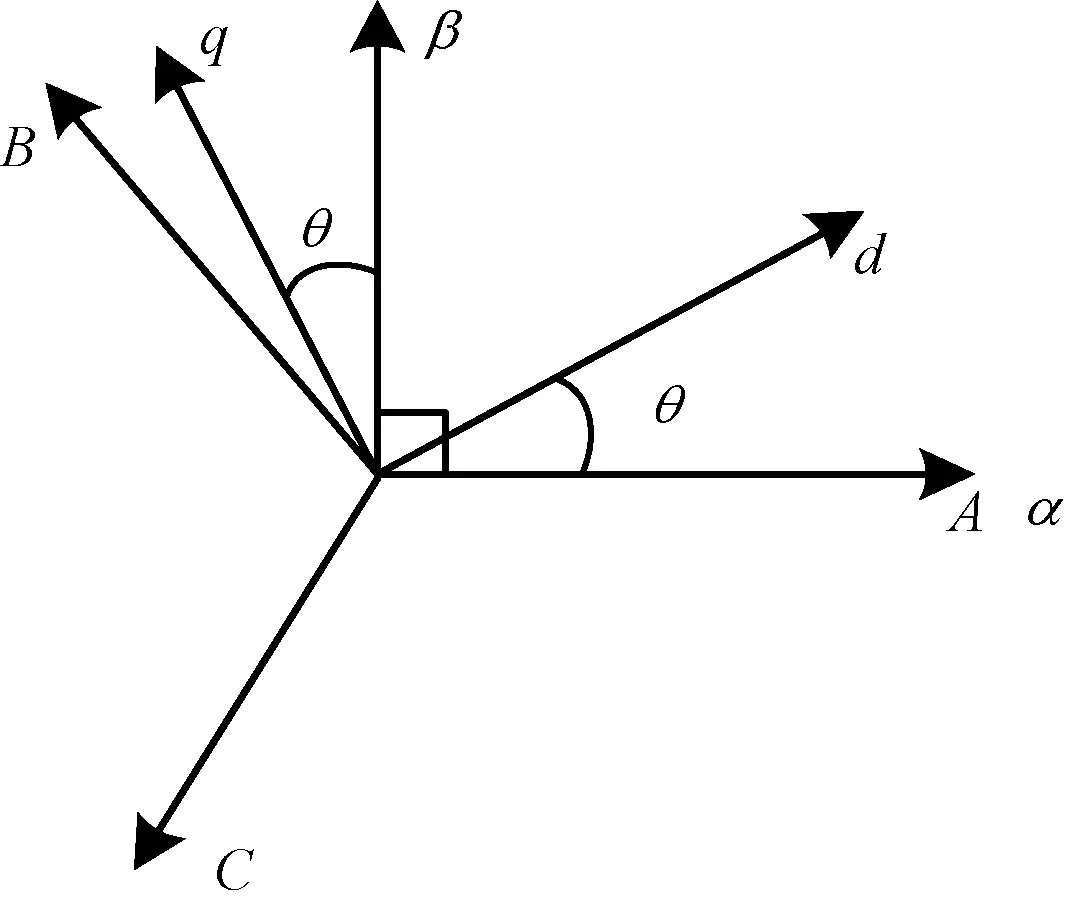
圖1 永磁同步電機電壓空間矢量圖
電壓方程為:
(3)
磁鏈方程為:
(4)
轉矩方程為:
Te=3p(ψfiq+(Ld-Lq)id)/2
(5)
式中:D=d/dt為微分算子;rs為定子電阻;Ld、Lq分別為d軸和q軸電感;Ud、Uq分別為d軸和q軸電壓;ω為轉子角速度;id、iq分別為d軸和q軸電流;Ψm、Ψd、Ψq、Ψf分別為永磁體、d軸、q軸、轉子磁通。
2 慣量辨識PI自整定原理
2.1 轉動慣量辨識PI自整定控制方法
傳統PI控制其控制參數是根據具體的數學模型而確立的,不能跟隨系統參數的變化自動整定,無法滿足工業的控制要求。而采用慣量辨識PI自整定控制方法,在電機勻加速過程中,通過分析計算其轉動慣量的大小對PI控制器中的控制參數進行整定,可以達到實時控制[5~7]。結構如圖2所示。
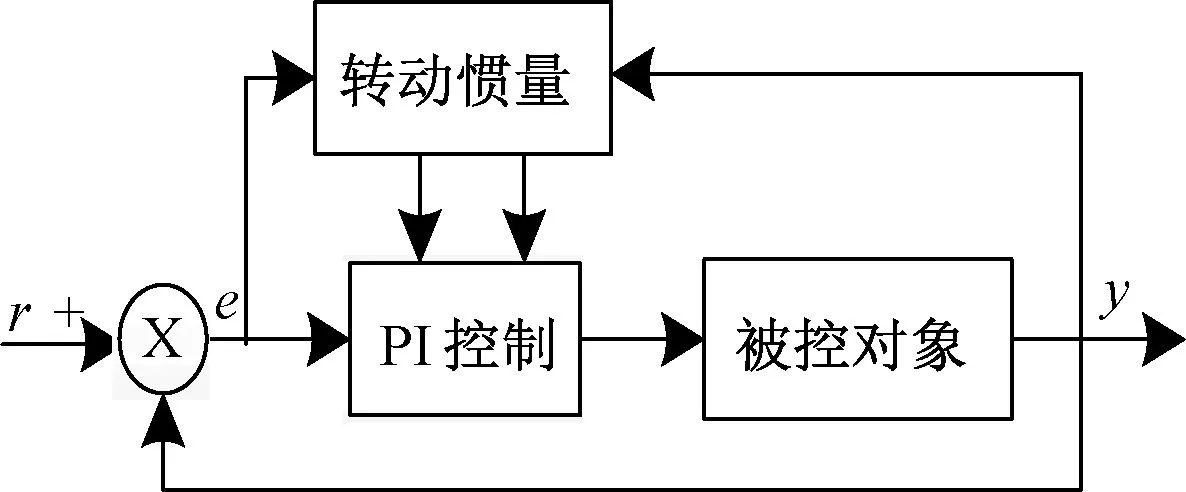
圖2 轉動慣量辨識PI自整定控制原理圖
2.2 轉動慣量辨識算法
在d、q坐標系下電磁轉矩Te與交軸電流iq成正比,其電磁轉矩方程為:
Te=Npψfiq
(6)
當不計摩擦時,其機械方程為:
(7)
式中:TL為負載轉矩,J為轉動慣量。
為保證電機正常運行,必須限制其最大電流,當采取id=0控制方式時,只需控制iq即可,取iq(max)=2in。當電機以最大電流穩定運行時,即Te=2Tn時,由式(7)得電機加速度為:
(8)
測定電機勻加速過程中t1、t2時刻轉子速度ω1、ω2,則有:
(9)
取iq(max)=in。當電機以最大電流穩定運行時,即Te=Tn時。測定電機勻加速過程中t3、t4時刻轉子速度ω3、ω4,且t4-t3=t2-t1,則有:
(10)
根據式(9)、(10)得出電機轉動慣量方程為:
(11)
根據轉動慣量辨識算法可知:電機必須處于勻加速過程才能測量轉動慣量的大小,但電機實際運行過程中不可能以勻加速運行,因此為實現慣量辨識算法,本文在電機啟動過程中取10個主采樣點,每個采樣點又分4個副采樣點,其中4個副采樣點時間要求間隔短,這樣在很短的時間間隔內近似認為電機處于勻加速運行狀態,從而通過式(11)即可得出慣量J的大小。
2.3 轉動慣量整定PI
永磁同步電機一般情況下均選取雙閉環控制方式。當電流環采用I型系統設計時,閉環傳遞函數為:
(12)
式中:T∑i=Toi+Ts:其中Toi是電流濾波時間常數,Ts為整流裝置滯后時間常數,KI為電流環開環增益,KI=1/2T∑i。
對于高階系統,一般都要進行降階處理,即忽略傳遞函數中的高次項,則閉環傳遞函數Wcli(s)變為:
(13)
對于轉速環,在轉速調節器(ASR)中應設有積分環節,以達到轉速無靜差;但是,電機運行過程中可能會受到各種各樣的干擾,因此,在干擾發生后應再設定一個積分環節,以保證其抗干擾效果好;所以轉速環應設計成II型系統,ASR應采用PI調節器,其傳遞函數為:
(14)
式中:Kn為轉速調節器比例系數;τn為轉速調節器時間常數。

圖3 轉速環結構圖
這樣,調速系統的開環傳遞函數為:
(15)
由于轉速調節器是按照II型系統設計的,其中參數Kn和τn滿足下式關系:
τn=2T∑ih
(16)
(17)
式中:h為中頻帶寬,h的大小與系統動態性能有關,h越小,則系統抗擾性越好;當h<5時會使系統震蕩次數增加;因此,選取h=5最好。則PI中的控制參數為:
(18)
(19)
式中:h、Kτ、T∑i均為常數。由式(18)、(19)可以得出,轉動慣量J對PI中的控制參數有重要的作用,因此可以通過轉動慣量J來整定PI參數。
3 仿真結果
3.1 電機參數
分別對傳統PID控制和慣量辨識PI自整定控制策略進行仿真,啟動階段,給定負載轉矩為1 N·m;在0.5 s時,負載轉矩變為 4 N·m。選取電機參數如表1所示。
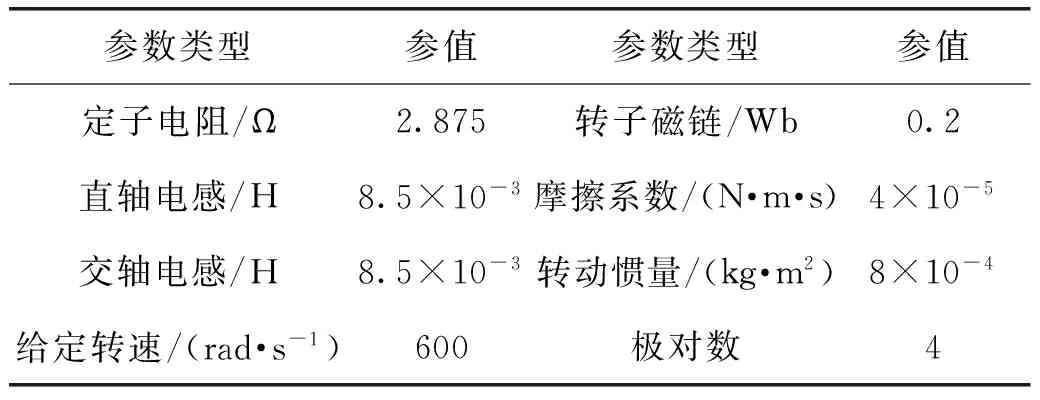
表1 電機參數
3.2 系統運行過程
仿真中控制方式為:Id=0控制,轉速設定為600 rad/s,通過測定電機勻加速過程中4個不同時刻轉速值,將轉速值送入到轉動慣量辨識模塊中,來控制轉速環中PI控制參數,根據電壓空間矢量脈寬調制原理[8~11],逆變出三相電流來驅動電機。結構如圖4所示。
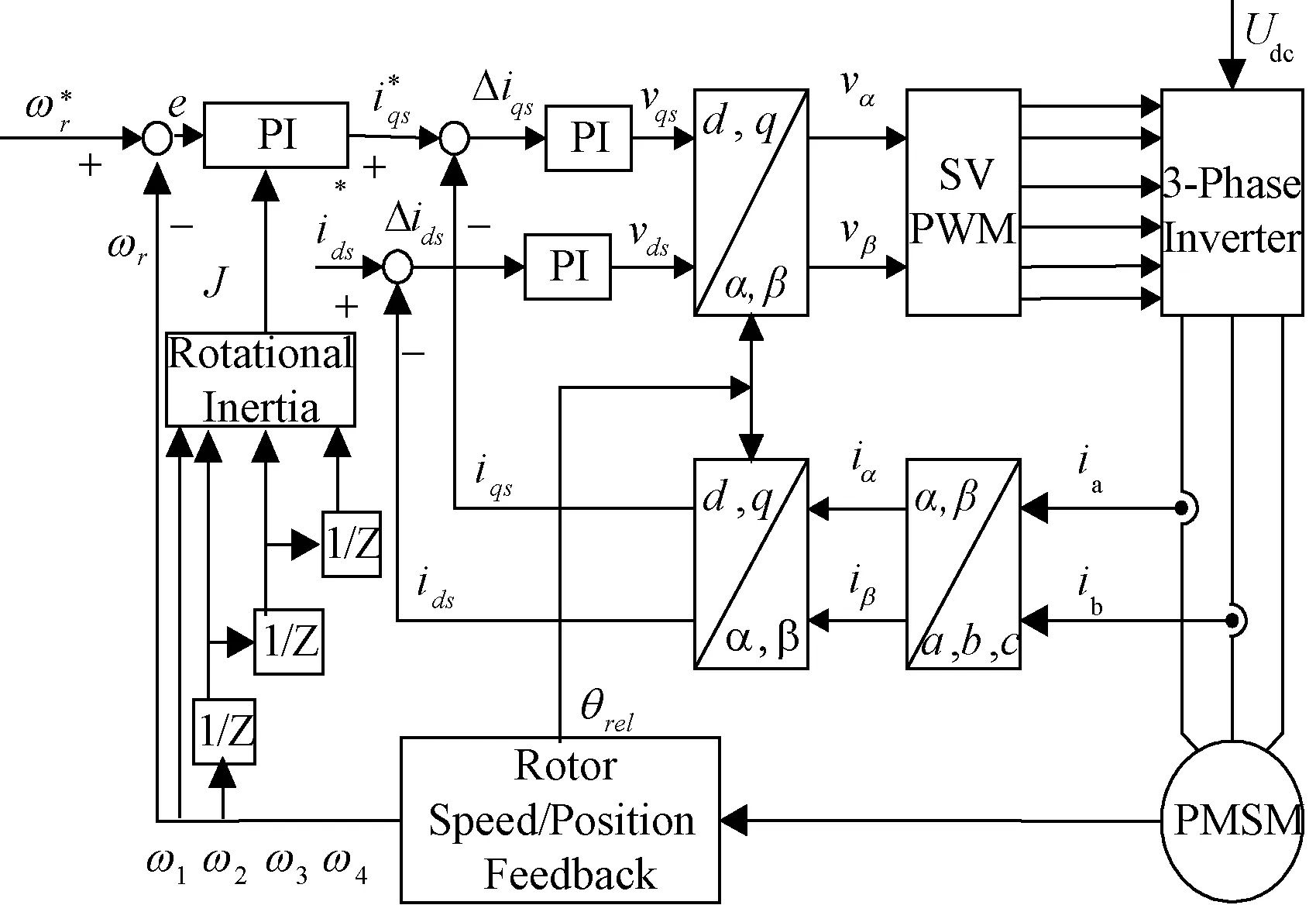
圖4 慣量辨識PI自整定結構圖
3.3 仿真曲線分析
從仿真曲線可以看出,傳統PI控制下轉速超調量大,因超調量大,電機容易發生抖動,轉子會撞擊電機外殼,易毀壞電機;而在慣量辨識PI自整定控制方式下,轉速響應快、無超調,實現了電機啟動高速化,如圖5所示。
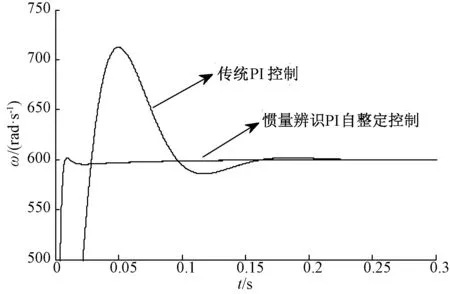
圖5 兩種控制模式下轉速仿真曲線
在擾動發生時,傳統PID控制下轉矩脈動很大,會產生很大的沖擊電流,容易對電機造成損害,甚至燒毀電機。而慣量辨識PI自整定控制,轉矩波形變化平緩,實現了系統快速穩定性,如圖6所示。
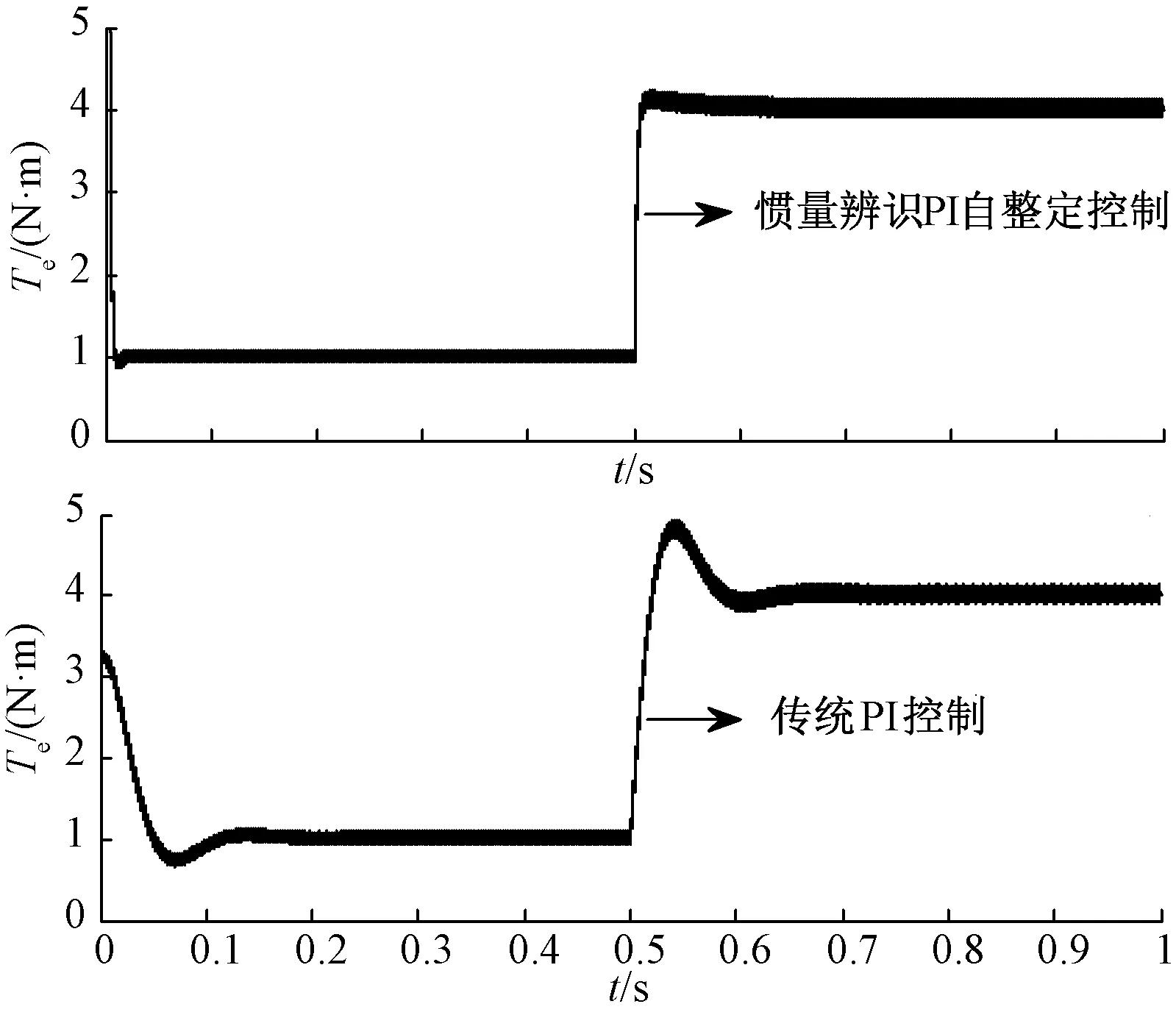
圖6 兩種控制模式下轉矩波形曲線
兩種控制模式下,其仿真結果對比如表2所示。
本文選取10個主采樣點,啟動開始時轉動慣量突然變化很大,然后迅速減小,最后逐漸上升到穩定值,其慣量辨識結果如表3所示。
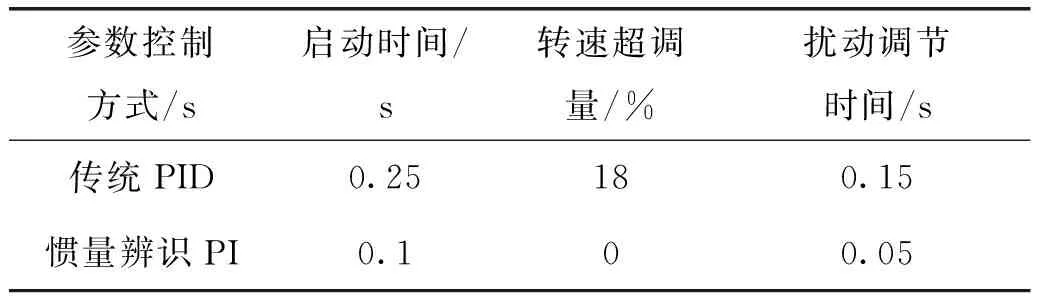
表2 仿真結果對比
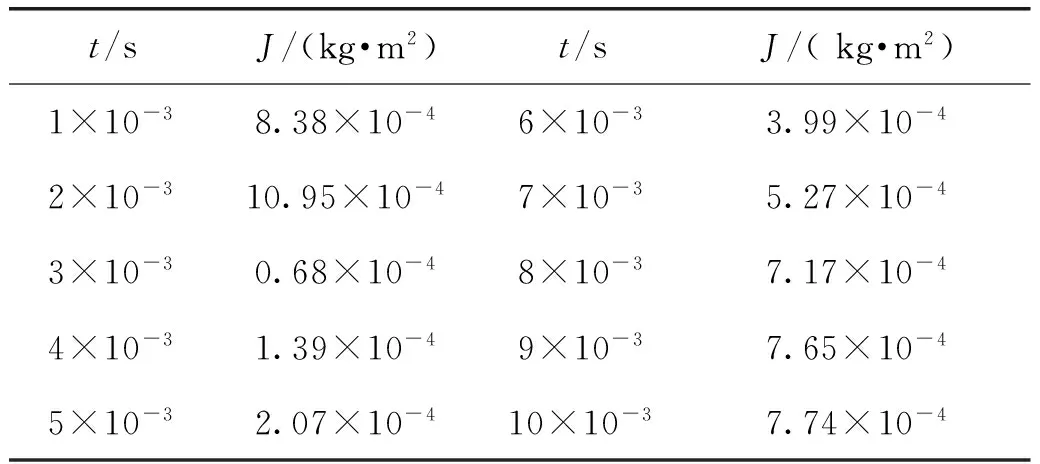
表3 慣量辨識結果
4 結論
永磁同步電機慣量辨識PI自整定控制方法對系統實時控制,實現了啟動高速化、無超調及強抗干擾能力,克服了傳統PID控制的缺陷。有利于提高數控機床以及高精密系統的效率和控制精度,改善了慣量易變系統的性能,在工程中具有良好的應用前景。
[1]陳伯時.電力拖動自動控制系統[M]. 北京:機械工業出版社, 2010.
[2]李燁.永磁同步電動機伺服系統研究現狀及應用前景[J].微電機,2001,34(4):30-33.
[3]劉旭,阮毅,張朝藝.一種異步電機轉動慣量辨識方法[J].電機與控制應用,2009,36(9):1-3.
[4]趙希梅,郭慶鼎. PMSM伺服系統的轉動慣量辨識和控制器參數優化[J].組合機應與自動化加工技術,2009,(7):75-77.
[5]Wu Y, Fangy Y, Liu L, et al. Global dynamic sliding mode control of PMSM speed servo systems base on extended state observer[C]. Control Conference (CCC),2013, 32nd Chinese IEEE,2013:4432-4437.
[6]蔣學程,彭俠夫.小轉動慣量永磁同步電機電流環內模控制[J].控制工程,2011,18(3):331-334.
[7]劉竹.帶PI參數自整定的永磁同步電機伺服系統的設計與實現[D].長沙:湖南大學,2013:24-36.
[8]王寶忠,王維,王波. 基于模糊自整定PI的PMSM伺服系統的仿真研究[J]. 電力科學與工程,2013,29(7):18-22.
[9]彭詠龍,黃瀟瀟,李亞斌.基于SVPWM的高功率因數三相混合開關型整流電路研究[J].電力科學與工程,2013,29(6):23-29.
[10]陳玲,紀萍,朱虹. 基于脈沖阻塞原理的多功能交交變頻系統的PWM研究[J].華北電力大學學報(自然科學版),2014,41(6):39-45.
[11]王春民,嵇艷鞠,欒卉,等. MATLAB/SIMULINK永磁同步電機矢量控制系統仿真[J]. 吉林大學學報(信息科學版),2009,27(1):17-22.
Research on Inertia Identification of PI Auto-tuning PMSM Servo System
Ma Lixin, Fan Hongcheng, Xu Zhenqian, Huang Yanglong, Zhou Shangjunxi
(School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China)
Aiming at the drawbacks of the traditional PID control and the problems of the changes of moment of inertia of PMSM servo system, a new method of moment of inertia identification of PI auto-tuning PMSM servo system is proposed. After the motor speed under the uniform acceleration motion having been measured, this method was employed to calculate the moment of inertia by using optimization. Then the control parameters can be auto-tuned by analysing the parameters' relationship between moment of inertia and speed loop. Data collected from MATLAB simulation model were compared with those acquired from traditional PID control. It leads to the conclusion that the new method can acquire high-speed starting, no overshoot and strong anti-interference abilities and perform better in both dynamic and static states. Accordingly, it can be widely applied in high precision control system and regarded as a theoretical foundation for solving the problem of variability of inertia.
permanent magnet synchronous motor; inertia identification; PI auto-tuning
2015-05-08。
上海張江國家自主創新重點項目(201310-PI-B2-008);滬江基金(C14002)。
馬立新(1960-),男,教授,主要從事電力系統穩定性、配電網規劃與優化配置、電力負荷需求分析與預測方法、調速系統智能控制等方面的教學與科研工作,E-mali:malx_aii@sina.com。
TM351
A
10.3969/j.issn.1672-0792.2015.09.006
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32