采用雙軸加速度計的旋轉彈運動姿態角速率測量方法
2015-06-05 14:51:32路永樂潘英俊黎蕾蕾
中國慣性技術學報 2015年2期
路永樂,潘英俊,黎蕾蕾,劉 宇,彭 慧
(1. 重慶大學光電技術及系統教育部重點實驗室,重慶 400044;2. 武漢大學 測繪遙感信息工程國家重點實驗室,武漢 430079;3. 光電信息感測與傳感技術重慶市重點實驗室,重慶 400065;4. 中國電子科技集團公司第二十六研究所,重慶 400060)
采用雙軸加速度計的旋轉彈運動姿態角速率測量方法
路永樂1,潘英俊1,黎蕾蕾2,劉 宇3,彭 慧4
(1. 重慶大學光電技術及系統教育部重點實驗室,重慶 400044;2. 武漢大學 測繪遙感信息工程國家重點實驗室,武漢 430079;3. 光電信息感測與傳感技術重慶市重點實驗室,重慶 400065;4. 中國電子科技集團公司第二十六研究所,重慶 400060)
研究了基于哥氏加速度原理的雙軸加速度計測量旋轉彈航向角角速率與俯仰角角速率的方法。首先根據哥氏加速度原理建立了旋轉彈三維動力學模型,得出三個軸向加速度輸出值同各軸角速率輸入值之間的轉換矩。針對旋轉彈橫滾角角速率遠大于航向角角速率與俯仰角角速率的情況,建立了旋轉彈的簡化動力學模型;基于簡化模型,提出了采用雙軸正交加速度計測量橫軸與豎軸上的加速度值,來實現對運動過程中航向角角速率與俯仰角角速率測量的方法。應用100 mm高射炮數據對該模型進行驗證,驗證結果同理論推導結果完全吻合。證明基于哥氏加速度的正交雙軸加速度計測量旋轉彈航向角角速率與俯仰角角速率理論的正確性和工程實現的可行性。
哥氏加速度;旋轉彈;俯仰角;航向角
隨著現代戰爭向著信息化、局部化方向發展以來,彈藥的智能精準控制成為了一個重要的研究方向[1]。旋轉彈通過自身旋轉產生陀螺力矩以克服由推力偏心、質量偏心、氣動偏心等引起的彈道散布,具有較強的抗干擾能力[2]受到了科研人員的青睞。由于高速旋轉彈從出膛、飛行、侵徹等過程需要經歷高沖擊[3]、高動態[4]等極其惡劣極端的物理過程使得實時準確監測并控制旋轉彈的運動姿態成為一大難題。
目前,測量旋轉彈運動姿態角速率的方法大體可以分為:①天文導航法:包含太陽方位角遙測法、星敏器法,該方法受限于時間和天氣因素[4-6];②外界輔助導航法:包含GPS[7]、基于光電測量的外測法[8-9],該方法很大程度依賴于外界輔助設備;③自主導航法:包含陀螺儀法[10]、地磁傳感器法[3]、加速度計法[11-14]。自主導航方法可以不依賴外界設備,可以完全自主、實時準確地獲得彈體的姿態信息。地磁傳感器法具有自主導航優點的同時,且誤差不隨時間積累,但地磁傳感器法要求不受磁性物質的干擾,在實戰中很難滿足。陀螺儀法在自主導航中有著大量的應用,但是光學陀螺儀、機械類陀螺儀難以承受旋轉彈在出膛、侵徹等過程中高沖擊的影響。振梁式陀螺儀[15-16]、MEMS陀螺儀具有抗沖擊的潛能,但是由于旋轉彈的高速自旋(1800 rad/s)將產生大的軸間干擾。傳統的加速度計法有三加速度計法[11]、六加速度計法[12]、九加速度計法[13]、十二加速度計法[14],這些方法同等條件下,體積大,成本高。
鑒于彈體體積小,三個軸向角速率、動態參數相差甚遠的情況,本文提出了一種正交雙軸加速度計測量旋轉彈航向角角速率、俯仰角角速率的新方法。該方法將加速度計敏感方向分別沿橫軸、豎軸方向放置,在避免縱軸方向高沖擊的影響同時實現對橫軸、豎軸方向上加速度的測量,進而實現全程、實時、無輻射、高采樣的航向角角速率與俯仰角角速率檢測。
1 正交雙軸加速度計俯仰角角速率與航向角角速率測量原理
1.1 旋轉彈原理
傳統彈丸在飛行過程中,當所受合外力不通過質心時,合外力將導致彈丸翻轉[17]。在來復線的作用下彈丸將高速自旋產生進動使彈丸具有軸向穩定性,在一定程度上消除空氣阻力等外力的影響,進而增加系統瞄準和直射距離。旋轉彈丸在彈道階段自旋角速度是衰減的,目前能夠較好地表述角速率和時間關系的為E.Roggla公式:

式中:ωg為彈丸膛口處自旋角速率(rad/s),k為修正系數,L為彈丸長度(m),D為彈丸直徑(m),ω為實時自旋角速率(rad/s),A為彈丸轉動慣量(kg·m2)。
王雨時根據實際測試結果得出E.Roggla公式的改寫公式[18]:

角加速度與時間的半經驗公式:

1.2 質點在直角坐標系中運動方程
如圖1所示,質點在直角坐標系下位置表示為:

角動量矢量表示為:

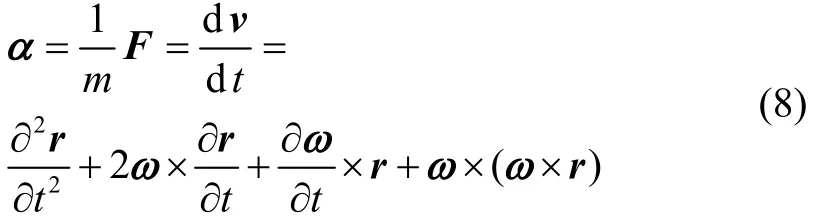
質點的速度和加速度為:
式中:dr/dt為質點在慣性坐標系下的速度;?r/?t、?2r/?2t 為質點在轉動坐標系下的速度和加速度;ω×r為轉動坐標系相對慣性坐標系轉動而產生的牽連速度;?ω/?t×r、ω×(ω×r)為因轉動坐標系轉動而產生的牽連切線加速度和向心加速度;2ω×?r/?t 為哥氏加速度,其與質點在轉動坐標系下的相對速度?r/?t及轉動坐標系的角速度ω有關。質點在轉動坐標系中的位置r發生改變,使得質點的牽連切線速度ω×r亦隨時間而改變,進而產生了加速度ω×?r/?t ;轉動坐標系的轉動改變了相對速度?r/?t的方向,將產生加速度為ω×?r/?t ,所以質點的哥氏加速度為2ω×?r/?t 。
如果質點的質量是m,作用在質點上的合力為F,則質點的運動方程為:
質點的三維運動方程用矩陣形式表述如下:
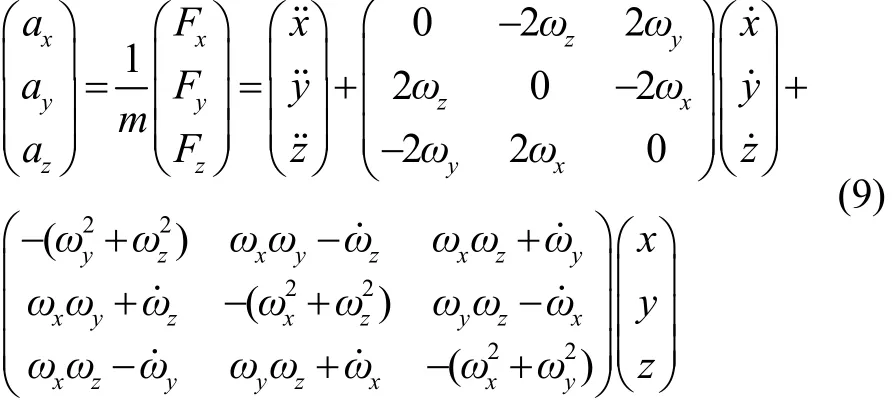
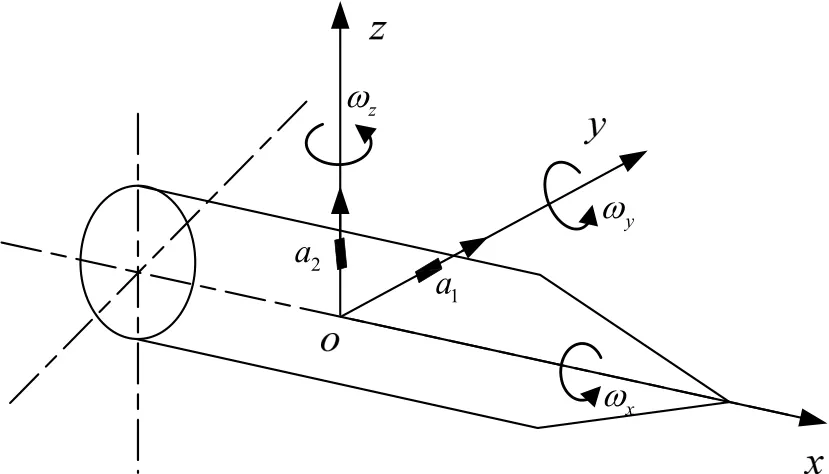
圖 1 旋轉彈在直角坐標系下的坐標定義Fig.1 Definition of projectile in rectangular coordinate system
2 正交雙軸加速度計數學模型
旋轉彈在飛行過程中航向角角速率ωz、俯仰角角速率ωy將遠遠小于橫滾角角速率ωx,即ωx?ωz,ωx?ωy。由于旋轉彈的小尺寸,縱軸軸向的高動態、高沖擊,橫軸軸向、豎軸軸向的低動態、小沖擊的特殊環境,使得:根據公式(9)可得縱軸軸向加速度為:

橫軸軸向加速度為:
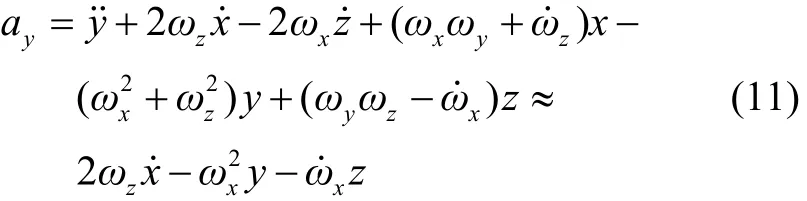
豎軸軸向加速度為:
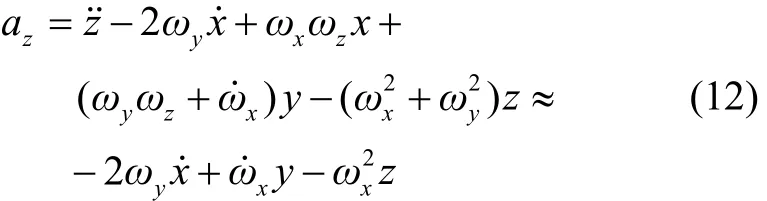
把式(2)(3)帶入式(11)(12)得:
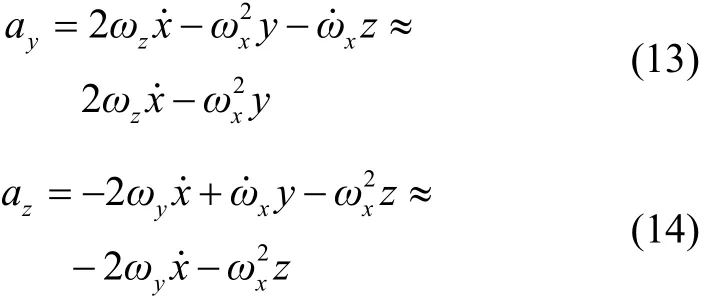
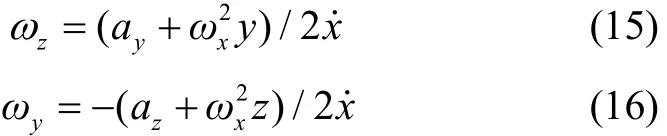
根據式(13)(14)可以看出,在旋轉彈縱軸軸向速度已知情況下,通過測定橫軸軸向、豎軸軸向加速度值,即可計算得到旋轉彈航向角角速率、俯仰角角速率:
在現實環境中,重力場在橫軸、縱軸上將產生一個頻率為ωx/2π的正弦信號,橫軸、縱軸輸出信號相位相差90°。由于該信號屬于已知頻率的交流信號,通過帶阻濾波器即可消除。
3 數據驗證
采用100 mm高射炮測試數據進行離線Matlab仿真驗證模型。根據文獻[18]報道100 mm高射炮測試出膛角速率ωx=1 800 rad/s,飛行速度V=900 m/s。設定俯仰角角速率ωy=0.01 rad/s,航向角角速率ωz=0 rad/s,加速度計距離中心軸距離分別為0.04 m、0.04 m。
飛行過程中旋轉彈自轉角速率如圖2所示,旋轉彈的橫滾角角速率隨時間呈指數衰減。該過程橫軸軸向加速度計,豎軸軸向加速度計輸出值如圖3所示,圖中藍線代表橫軸軸向加速度輸出值,紅線代表豎軸軸向加速度計輸出值。橫軸和豎軸加速度計輸出數值整體呈指數衰減規律,輸出值中存在向心加速度分量,向心加速度在旋轉彈飛行過程中只與自轉角速度相關。將橫軸和豎軸加速度計輸出值與時間關系進行數值擬合,擬合形式為y=b?exp(a?t),置信區間設為95%,擬合結果如表1所示。表1顯示,橫軸軸向加速度計輸出值與時間呈現指數衰減關系其衰減系數-0.0212,為橫滾角角速率衰減系數-0.0106的2倍,同理論值完全吻合;豎軸軸向加速度計輸出值與橫軸軸向加速度計輸出值呈同樣的規律。進一步分析橫軸與豎軸軸向加速度計輸出值同橫滾角角速率的相關性,結果如表1所示,橫軸與豎軸軸向加速度計輸出值同橫滾角角速率相關系數同為-0.9999,由此可得,橫軸與豎軸軸向加速度計輸出值同橫滾角角速率高度相關。
圖4為橫軸與豎軸軸向加速度計輸出值經過向心加速度補償后的數值,理論上橫軸軸向加速值輸出為零,豎軸軸向加速度值輸出為-18 m/s2,而從圖4中可以看出,僅僅經過向心加速度值修正后的輸出值同理想值之間存在一定誤差。該誤差隨時間推移逐漸減小,誤差最大值0.7659 m/s2出現在開機啟動時。

表1 加速度計原始輸出數據擬合及相關性分析表Tab.1 Results of original data fitting and correlation
通過式(9)旋轉彈三維動力學模型可知,橫軸軸向加速度計輸出值中包含向心加速度誤差、航向角角速率干擾、橫滾角角速率干擾,而后兩者統稱為軸間干擾。豎軸軸向加速度計輸出值同樣存在向心加速度誤差、軸間干擾誤差。因此圖4中所示誤差為軸間干擾誤差所致。
由于橫滾角角速率遠遠大于其他兩個軸向的輸入,因此在旋轉彈飛行過程中軸間干擾誤差主要由橫滾角角速率產生。采用指數函數y=b?exp(a?t)對軸間干擾誤差同時間的關系進行擬合,結果如表 所示。更一步驗證軸間干擾誤差同橫滾角角速率、俯仰角角速率、航向角角速率的關系,分別求得軸間干擾誤差同橫滾角角速率、俯仰角角速率、航向角角速率的相關系數如表2所示。從表2可得,軸間干擾誤差隨時間的衰減系數-0.0212,軸間干擾誤差與橫滾角角速率相關系數為0.9999呈高度相關,與俯仰角角速率、航向角角速率無關。
基于此將數據帶入(13)(14)的簡化模型,將簡化模型豎軸輸出同加速度計輸出進行對比,結果對比如圖5所示。簡化模型輸出值同加速度計輸出值重合,說明在俯仰角角速率、航向角角速率遠小于旋轉彈橫滾角角速率的情況下,忽略俯仰角角速率和航向角角速率的影響是合理的。
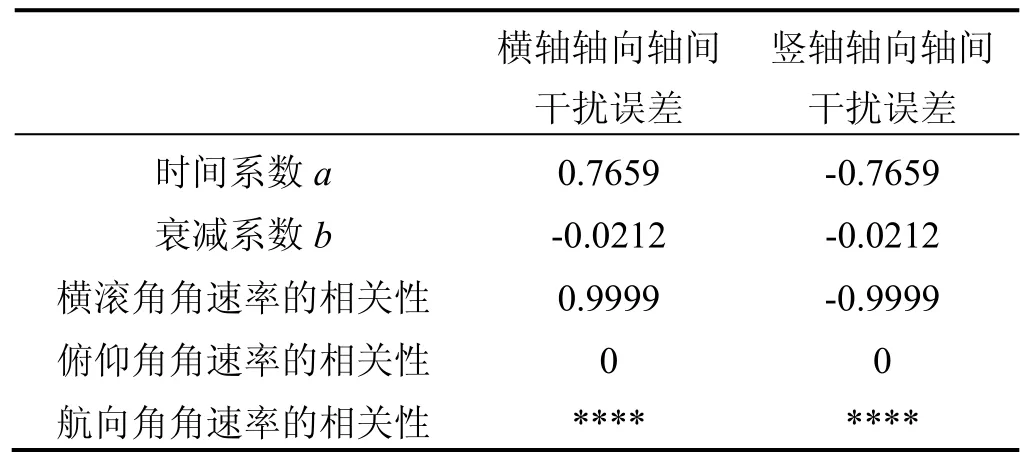
表 2 加速度計誤差數據擬合及相關性分析表Tab.2 Results of original data fitting and correlation
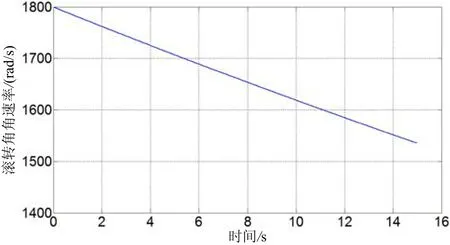
圖2 自旋角速度同時間關系圖Fig.2 Roll angle vs. time
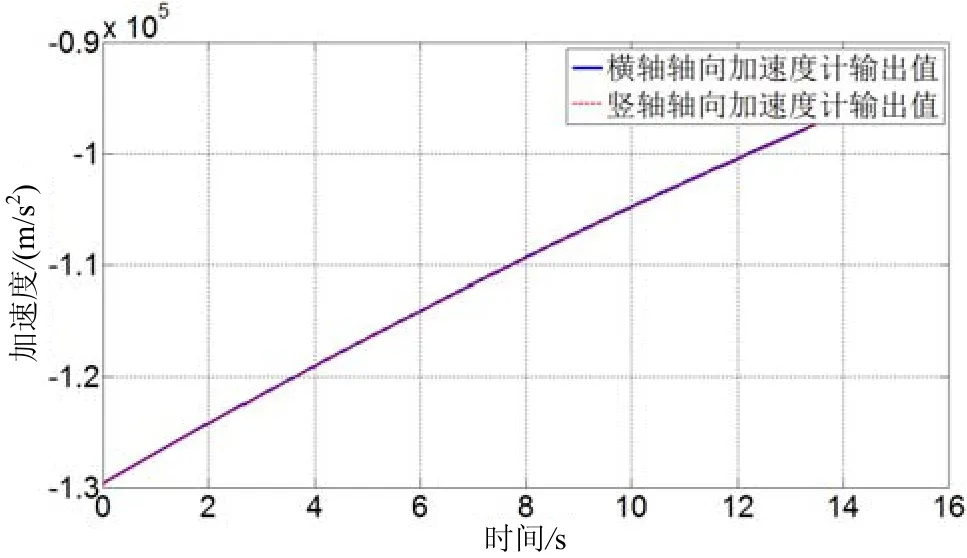
圖3 雙軸加速度計輸出值Fig.3 Output of acceleration
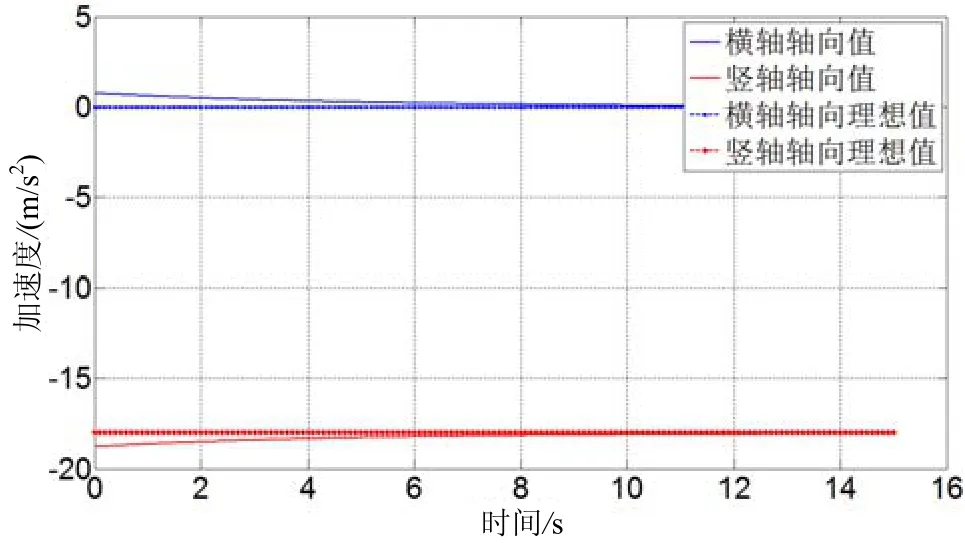
圖4 軸間干擾效果圖Fig.4 Effect of interference among axes
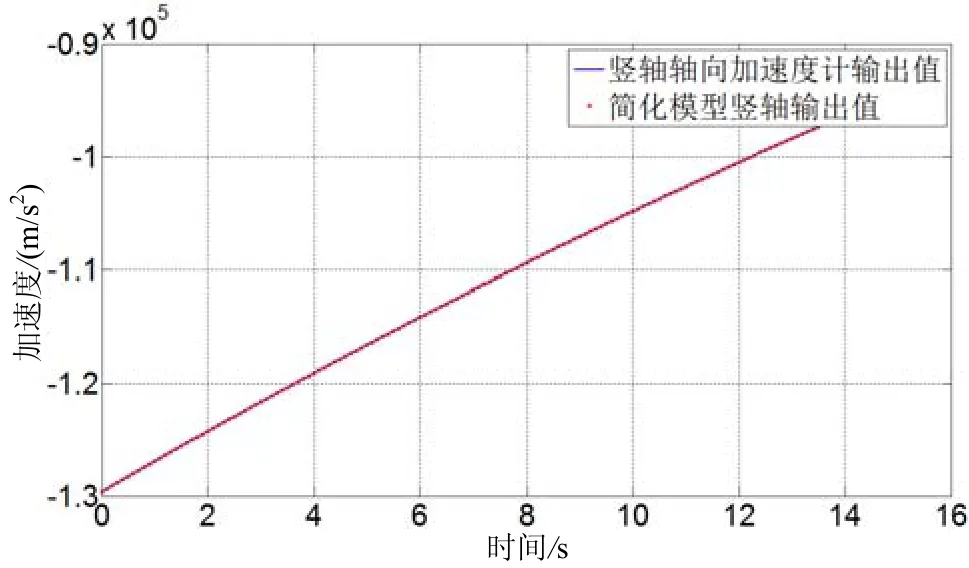
圖5 簡化模型與加速度計輸出值對比圖Fig.5 Result of the simplified model vs. acceleration
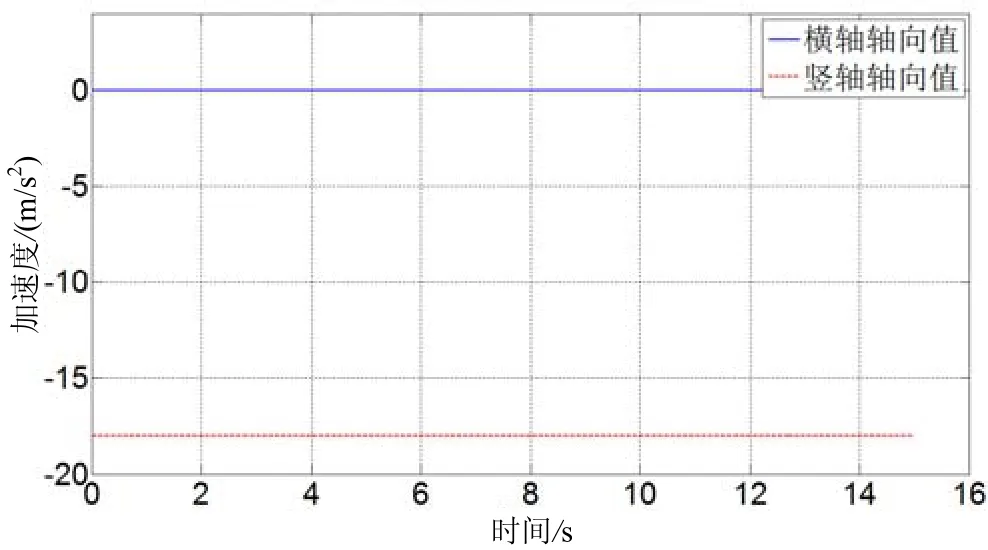
圖6 補償后加速度計輸出值Fig.6 Compensated result of acceleration
對加速度計輸出值同時進行向心加速度誤差和軸間干擾誤差補償,補償結果如圖6所示。經過補償后的加速度計輸出從本質上抑制向心加速度誤差和軸間干擾誤差的影響。最后通過式(15)(16)解算得俯仰角角速率ωy=0.01 rad/s,航向角角速率ωz=0 rad/s,同真實值吻合。
4 結 論
本文分析了旋轉彈在慣性坐標系下的運動狀態,建立了旋轉彈的三維動力學模型,得出三個軸向加速度輸出值同各軸角速率輸入值之間的轉換矩陣。根據橫滾角角速率遠大于航向角角速率與俯仰角角速率的情況,進一步簡化得出了旋轉彈的三維動力學簡化模型。基于此,提出了采用雙軸加速度計測量旋轉彈航向角角速率與俯仰角角速率的方法。根據旋轉彈三維動力學模型得出向心加速度和軸間干擾是影響測量精度的主要誤差。針對向心加速度和軸間干擾的產生機理得出橫滾角角速率是產生這兩種誤差的根源,通過加速度計輸出值與橫滾角角速率做相關性分析,數據顯示:兩種誤差同橫滾角角速率相關系數均為0.9999,屬高度相關。根據兩種誤差同橫滾角角速度的對應關系,建立了利用補償后加速度計輸出值進行旋轉彈航向角與俯仰角角速率求解的算法模型,采用100 mm高射炮一個飛行過程中的數據進行驗證,數據驗證結果同初設值完全吻合,證明了理論模型的正確性和工程實現的可行性。
(References):
[1] Sahu J, Heavey K R. Progress in simulations of unsteady projectile aerodynamics[C]//High Performance Computing Modernization Program Users Group Conference. Schaumburg, IL,USA, 2010: 123-132.
[2] 苗瑞生, 吳甲生. 旋轉彈空氣動力學[J].力學進展, 1987, 17(4): 479-487. Miao Rui-sheng, Wu Jia-sheng. Aerodynamics of spinning projectiles[J]. Advances in Mechanics, 1987, 17(4): 479-487.
[3] Grandvallet B, Zemouche A, Boutayeb M, et al. Real-time attitude-independent three-axis magnetometer calibration for spinning projectiles: a sliding window approach[J]. IEEE Transactions on Control Systems Technology, 2014, 22(1): 255-264.
[4] Nobahari H, Asl H G, Abtahi S F, et al. A backpropagation approach to compensate velocity and position errors in an integrated inertial/celestial navigation system using unscented Kalman filter[J]. Journal of Aerospace Engineering, 2014, 228(10): 1702-1712.
[5] Ning X L, Huang P P, Fang J C, et al. A new celestial navigation method for spacecraft on a gravity assist trajectory[J]. Mathematical Problems in Engineering, 2013, 42(5): 138-152.
[6] 王 鵬, 張迎春. 一種基于加速度計和天文的衛星自主導航新方法[J]. 中國慣性技術學報, 2013, 21(4): 489-494. Wang Peng, Zhang Ying-chun. New method of satellite autonomous navigation based on accelerometer and celestial navigation[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 489-494.
[7] Munguia R. A GPS-aided inertial navigation system in direct configuration[J]. Journal of Applied Research and Technology, 2014, 12(4): 803- 814.
[8] 龍達峰, 劉俊, 張曉明, 等. 高速旋轉彈飛行姿態磁測解算方法[J]. 彈道學報, 2013, 25(2): 69-73. Long Da-feng, Liu Jun, Zhang Xiao-ming, et al. Magnetic survey solution method for flying attitude of high speed rotating ammunition[J]. Journal of Ballistics, 2013, 25(2): 69-73.
[9] Zhang R Y, Wang Y Q, Wu T, et al. Radar reflected signal process of high spinning rate projectiles[C]//The Eighth International Conference on Electronic Measurement and Instruments. Xi'an, China, 2007: 3982-3985.
[10] Stancin S, Tomazic S. Time and computation efficient calibration of MEMS 3D accelerometers and gyroscopes [J]. Sensors, 2014, 14: 14885-14915.
[11] 范成葉, 李杰, 景增增, 等. 旋轉彈用三軸加速度計安裝位置誤差標定補償技術[J]. 傳感技術學報, 2013, 26(10): 1352-1356. Fan Cheng-ye, Li Jie, Jing Zeng-zeng, et al. Calibration and compensation method on installation position error of tri-axis accelerometer units used in spinning projectiles[J]. Chinese Journal of Sensors and Actuators, 2013, 26(10): 1352-1356.
[12] Hung C Y, Lee S C. A calibration method for sixaccelerometer INS[J]. International Journal of Control, Automation and Systems, 2006, 4(5): 615-623.
[13] 周紅進, 許江寧, 覃方君, 等. 一種新的基于加速度計的無陀螺捷聯慣性導航系統設計與實現[J]. 儀器儀表學報, 2008, 29(7): 1499-1502. Zhou Hong-jin, Xu Jiang-ning, Qin Fang-jun, et al. Design and realization of novel gyro-free strap down inertial navigation system based on accelerometer[J]. Chinese Journal of Scientific Instrument, 2008, 29(7): 1499 - 1502.
[14] Park S, Hong S K. Angular rate estimation using a distributed set of accelerometers[J]. Sensors 2011, 11(11): 10444-10457.
[15] 劉宇, 路永樂, 曾燎燎, 等. 固態振梁角速率傳感器的動力學特性與誤差分析[J]. 機械工程學報, 2011, 47(4): 7-11. Liu Yu, Lu Yong-le, Zeng Liao-liao, et al. Analysis on dynamic characteristic and error of solid vibration beam rate sensor[J]. Journal of Mechanical Engineering, 2011, 47(4): 7-11.
[16] Liu Yu, Lu Yong-le, Du Xiao-peng, et al. Analysis of high shocking resistance of an improved node plane supporting vibration beam gyroscope[J]. International Journal of Digital Content Technology and its Applications, 2012, 6(9): 319-328.
[17] 關世璽, 張斐, 范國勇, 等. 彈丸外彈道運動學分析及模擬試驗[J]. 彈箭與制導學報,2012, 2(4): 165-169. Guan Shi-xi, Zhang Fei, Fan Guo-yong, et al. The analysis and simulation experiment of projectile's exterior trajectory kinematics[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2012, 2(4): 165-169.
[18] 王雨時. 旋轉彈丸外彈道自轉角速度衰減規律半經驗公式[J]. 探測與控制學報, 2003, 25(1): 1-6. Wang Yu-shi. Half-experiential formulas for calculating decreasing angular velocity of projectile in trajectory[J]. Journal of Detection & Control, 2003, 25(1): 1-6.
Measurement method of projectile’s heading and pitching angle velocities based on biaxial accelerometer
LU Yong-le1, PAN Ying-Jun1, LI Lei-lei2, LIU Yu3, PENG Hui4
(1. Key Lab. of Opto-Electronic Technology & System, Ministry of Education, Chongqing University, Chongqing 400044, China; 2. State Key Lab. of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China; 3. Chongqing Municipal Level Key Laboratory of Photoelectronic Information Sensing and Transmitting Technology, Chongqing 400065, China; 4. 26th Institute of China Electronics Technology Group Corporation, Chongqing 400060, China)
A measurement method of projectile’s heading angle velocity and pithing angle velocity based on the orthogonal biaxial Coriolis acceleration is proposed. In this study, a three-dimension dynamic model of the projectile in the inertial space is established based on the Coriolis acceleration principle. The transition matrix from angular velocity along the three axes to the acceleration for the three axes is obtained. The simplified dynamic model of the projectile is given as the values of roll angle velocity which are much bigger than the angle velocity value of heading or pitching. Based on this principle, the value of the heading angel velocity or pitching angle velocity can be measured by calculating the accelerations of the pitching axis and heading axis. The numerical simulation results of 100 mm anti-aircraft agree with the theoretical deduction results. The proposed method provides an effective theoretical guidance for measuring the projectile’s heading and pitching angle velocities based on the accelerometer.
Coriolis acceleration; spinning projectile; pitching angle; heading angle
V324.2+3
A
1005-6734(2015)02-0160-05
10.13695/j.cnki.12-1222/o3.2015.02.005
2014-10-28;
2014-11-20
國家自然科學基金資助項目(51175535);中國博士后科學基金(2012M521470)
路永樂(1985—),男,博士研究生,從事慣性傳感器及系統研究,中國慣性技術學會會員。
聯 系 人:黎蕾蕾(1981—),男,博士后。E-mail:lill@cqu.edu.cn
