無信號交叉口交通沖突分析
2015-06-05 09:06:13黃選偉吳偉明
重慶交通大學學報(自然科學版) 2015年3期
張 鄰,黃選偉,吳偉明
(南昌航空大學 數學與信息科學學院,江西 南昌 330063)
?
無信號交叉口交通沖突分析
張 鄰,黃選偉,吳偉明
(南昌航空大學 數學與信息科學學院,江西 南昌 330063)
為了研究無信號交叉口沖突車輛間駕駛員的決策行為,從博弈角度出發,根據影響駕駛員決策行為的性格因素,以及不同策略之間相對的勢因素,通過時間細化,建立基于重復博弈下影響駕駛員決策行為的效用函數。通過駕駛員在交叉行進過程中的決策行為,分析不同駕駛員決策行為組合的效用,確定博弈過程中存在Nash均衡,得到動態博弈中駕駛員的最優決策。例證表明:沖動型的駕駛員在各決策時間段內更愿意選擇加速搶先策略;溫和型的駕駛員在各決策時間段內偏好于加速搶先策略或保持勻速策略;謹慎型的駕駛員在各決策時間段內偏好于選擇保持勻速策略或減速禮讓策略。
交通工程;無信號交叉口;重復博弈;交通沖突;Nash均衡
0 引 言
無信號交叉口在整個交通網絡中起著舉足輕重的作用,如果運行不良則會影響整個交通系統的運行。由于沒有信號燈控制,駕駛員的主觀決策行為,直接影響著無信號交叉口的運行情況,駕駛員必須自己判斷進入交叉口的安全時刻,尋求在交通流中進入交叉口的安全機會,使車輛安全、快速地通過交叉口。因此,深入研究無信號交叉口駕駛員的決策行為可以改善無信號交叉口的通行效率、減少無信號交叉口交通事故,同時也為分析無信號交叉口車輛間的相互沖突提供理論支持,所以,對于無信號交叉口駕駛員決策行為的研究具有非常重要的現實意義。
許多學者對駕駛員決策行為進行研究[1-4]。Mutat Demir,等[5]提出了一種駕駛模擬器為不同性格的駕駛員提供模擬駕駛環境,建立了駕駛員的行為模型,這能讓駕駛員在一個安全的環境中練習駕駛,減少交通事故的發生,但是其沒有結合駕駛員的行為模型來評估駕駛模擬器的有效性,且駕駛模擬和現實的交通環境還存在很大差別;Chen Chang-kuna,等[6]運用元胞自動機模型對T型交叉口行人的疏散行為進行研究,結果表明行人密度對交叉口行人的疏散行為影響較大,但只是對信號交叉口行人的疏散行為進行了研究,沒有考慮無信號交叉口機動車與機動車之間無序的沖突互動。王曉原,等[7]運用沖突點法進行駕駛員的決策行為仿真,深入分析多源信息刺激下駕駛員協同行為;陳富堅,等[8]運用博弈論知識建立交叉口駕駛員的決策行為模型,通過混合策略的Nash均衡解,引入信號燈輪換均衡機制的設置標準;郭偉,等[9]利用場圖工具建立了交叉口駕駛員行為模型,并設計了基于博弈論的協調算法。這些模型將沖突車輛間駕駛員的決策行為均簡化為“單次決策”,不能準確的刻畫交叉口沖突車輛間駕駛員復雜的心理過程,忽略了沖突車輛間駕駛員決策行為的相互影響。劉小明,等[10]從更小時空尺度考慮無信號交叉口駕駛員插車行為,并建立了基于博弈論[11-12]的無信號交叉口駕駛員插車行為模型,分析了不同駕駛員類型組合在插車博弈過程中的Nash均衡,及相應的駕駛員行為,但是其交通沖突時間的界定指標選取為定值,而此值應與沖突車輛的速度有關。上述這些模型從微觀角度,合理的刻畫交通狀態演化或交通控制效果,但這些模型沒有考慮駕駛員決策時空尺度,沒有考慮不同性格類型駕駛員在不同沖突位置的決策行為差異,適用性不強。
基于上述原因,筆者根據博弈論知識以及駕駛員的性格和心理特征,對無信號交叉口駕駛員決策行為進行多時段分析,考慮不同類型駕駛員決策行為的差異,并結合沖突車輛到沖突點的距離因素,建立了基于動態重復博弈的駕駛員決策行為模型,通過實例,應用模型模擬駕駛員的最優決策行為。
1 無信號交叉口機動車輛間博弈分析
無信號交叉口的車、自行車和人的通行,是車、自行車和人的相互博弈過程,其中,機動車與機動車的博弈是典型的“重復博弈”的過程,駕駛員為了盡快地通過沖突區域進行一系列的決策,該過程是完全信息下的動態博弈過程。
圖1為一雙向2車道無信號交叉口,N代表北,S代表南,W代表西,E代表東。對于直行車流,在交叉口沖突區內有4個沖突點A,B,C,D,其中,A為N→S與W→E兩直行車流的沖突點;B為S→N與W→E兩直行車流的沖突點;C為S→N與E→W兩直行車流的沖突點;D為N→S與E→W兩直行車流的沖突點;L1為n1到A點的距離;L2為n2到A點的距離;L為沖突區域的半徑(常數),這里的沖突區域指的是以沖突點為圓心,以機動車間相互產生影響的臨界距離為半徑的圓[7],可簡單表示為:
(1)
式中:vm為由于道路條件限制,車輛所能達到的最大速度;t為駕駛員的反應時間,一般取為0.5s;am為車輛的最大減速度;w為機動車間的安全距離,一般取為2m。
正常情況下,機動車的加速度a=2.5m/s2,緊急情況下a=7.3m/s2[7],這里取am=7m/s2,令vm=60km/h,根據式(1),得L=30m。
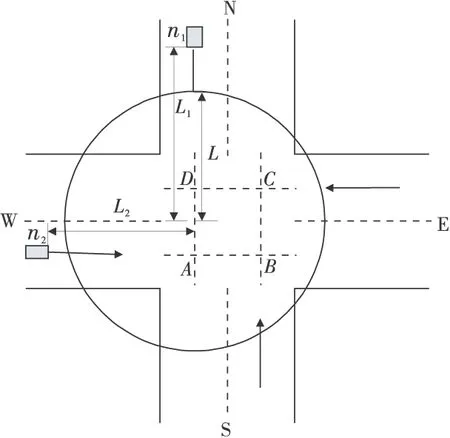
圖1 無信號交叉口示意
假設此時交叉口無視野遮擋,N→S方向有1個車輛n1,W→E方向有1個車輛n2,假設n1的駕駛員發現n2時,n1到A點的距離為d1,n2到A點的距離為d2,且此時n1與n2的速度分別為v1和v2,加速度分別為a1和a2。

(2)
式中:Δt為每一時段的時間長度。

(3)
(4)
(5)
同理可得:
(6)
(7)
(8)
(9)

因此,n1與n2到達沖突點A的時間差ΔTi為:
(10)
2 機動車間博弈模型的建立
重復博弈是指同樣結構的博弈重復多次,在重復博弈中,所有參與人都能觀測到博弈過去的歷史,并且所有參與人都是同時采取行動。令無信號交叉口沖突區域的參與人l博弈的策略空間為:

n1與n2兩個參與人重復博弈過程中,他們的效用不僅與自己的策略有關,還和對方的策略有關,因此,n1與n2的效用函數可分別表示為:

在車輛通過無信號交叉口的過程中,駕駛員均希望能安全盡快地通過交叉口,其中安全是首要因素。因此,可以從安全這一方面來衡量效用。

(11)

若n1先到達沖突點A:
(12)
若n2先到達沖突點A:
(13)
式中:j=1,2;i=1,2,…,k;G[·]表示對計算結果的數據處理。
3 算 例

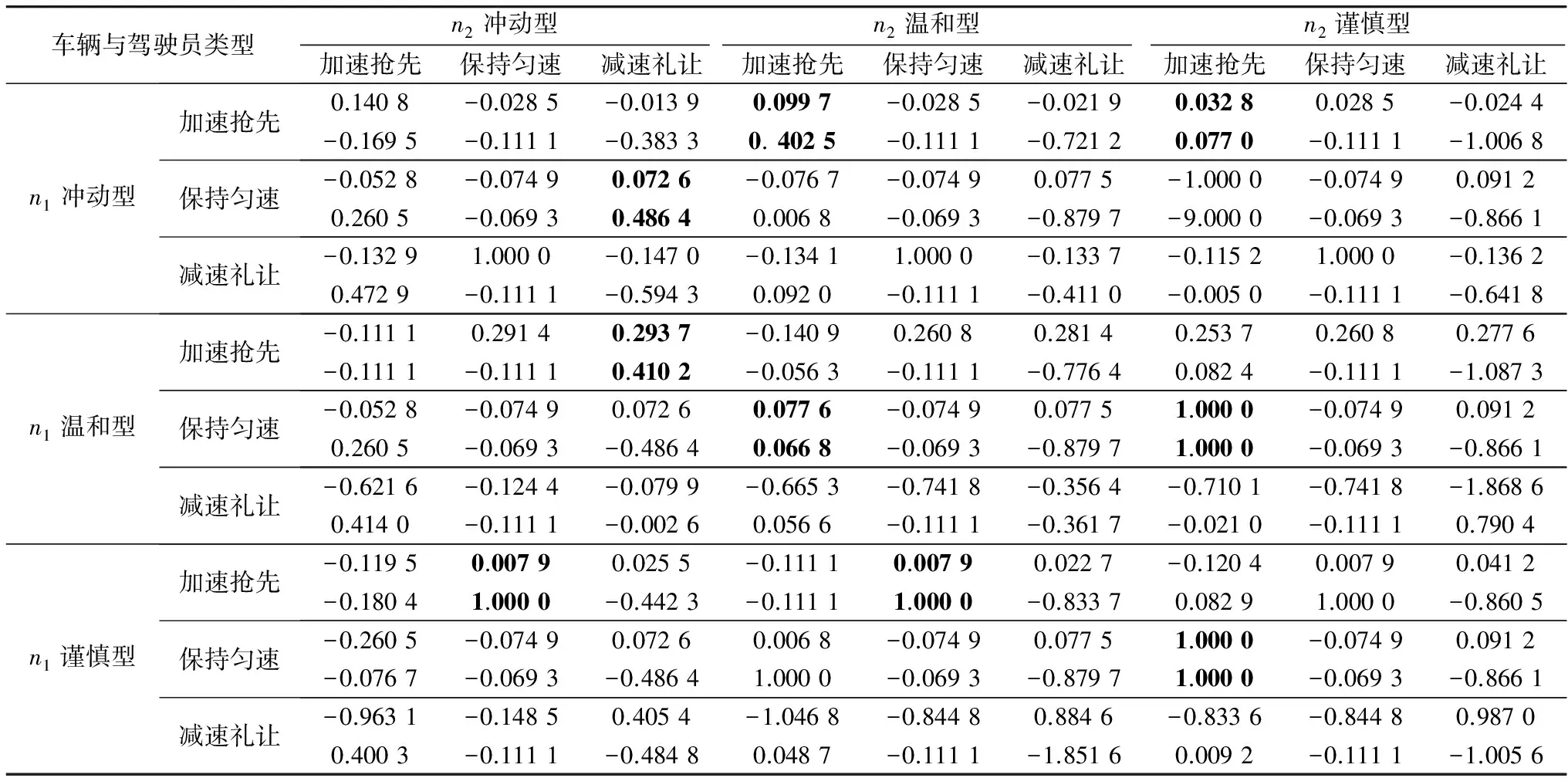
表1 博弈效用值
由表1知,在n1與n2的駕駛員博弈過程中,存在Nash均衡,如表中的加粗部分的數據就是雙方采取各種策略對應的均衡效用。
表2是根據表1參與博弈雙方獲得的效用,得到雙方對應的最優策略。如當n1與n2的駕駛員為(沖動型,溫和型)時,n1與n2的駕駛員的最優策略為:n1的駕駛員選擇加速搶先,n2的駕駛員選擇加速搶先。
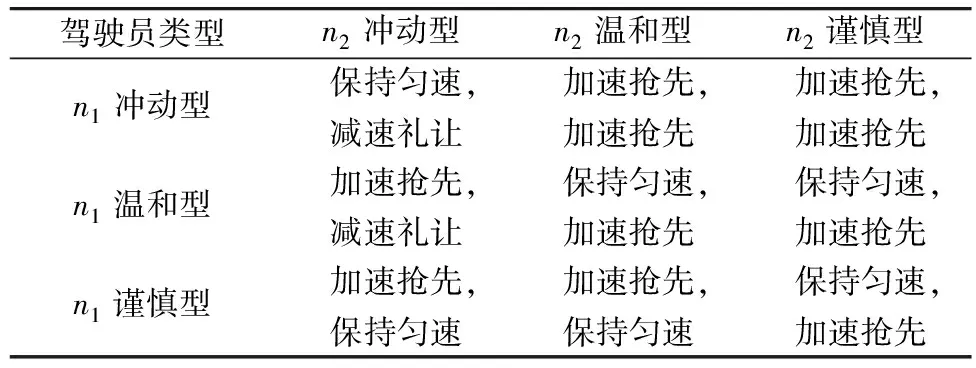
表2 博弈過程中不同駕駛員類型組合的最優策略
圖2表示不同駕駛員性格類型及不同策略間n1與n2的效用值的變化趨勢。
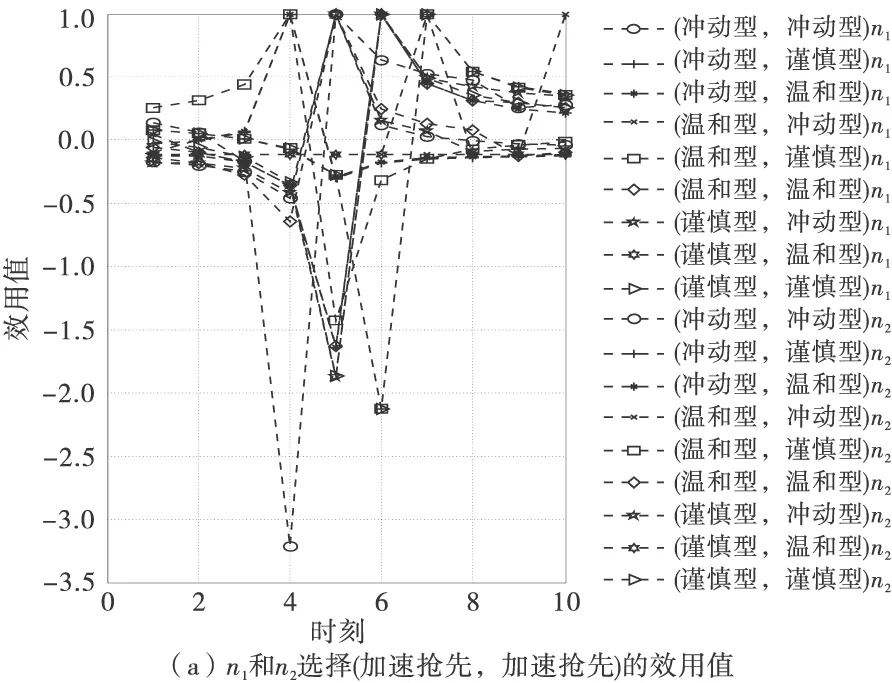
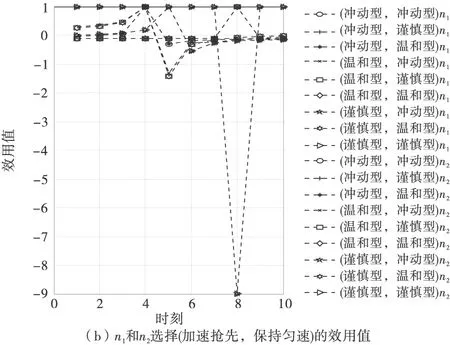
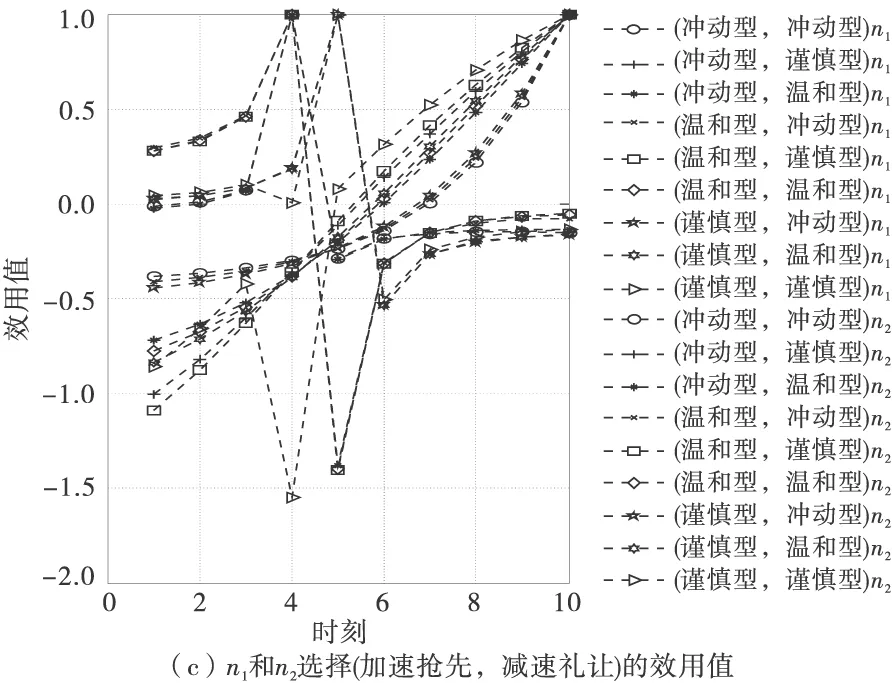
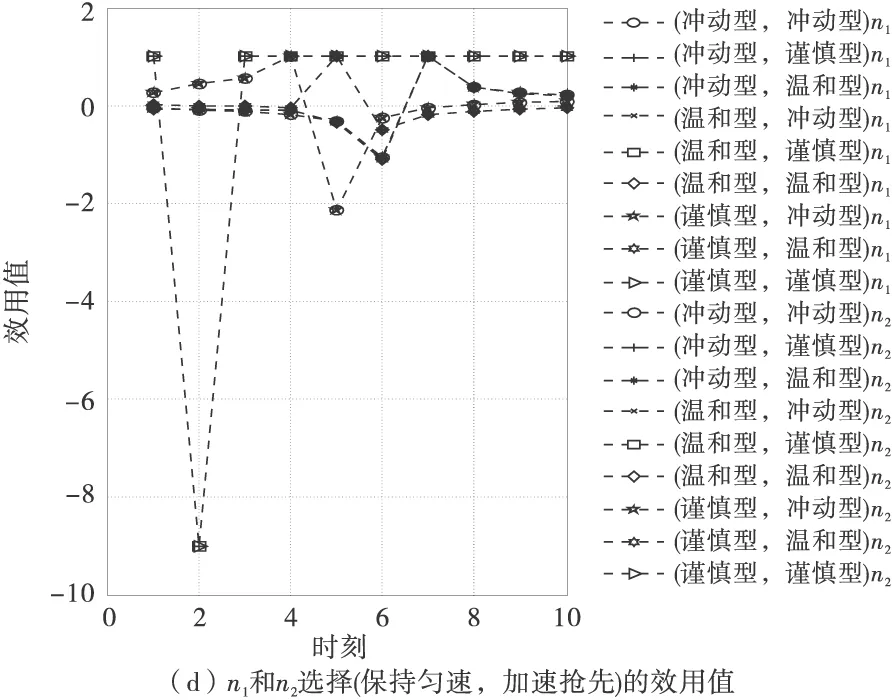
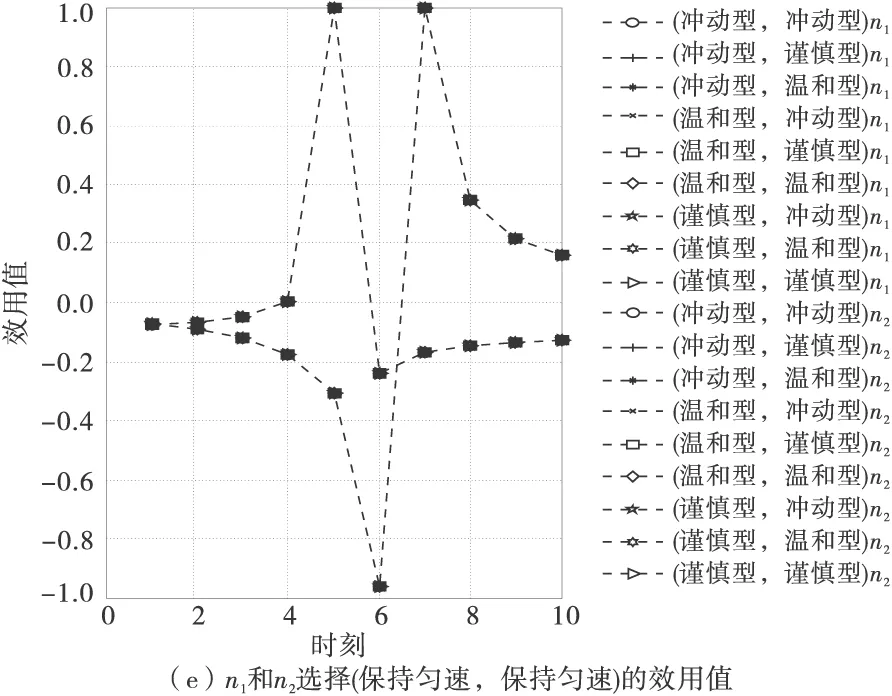
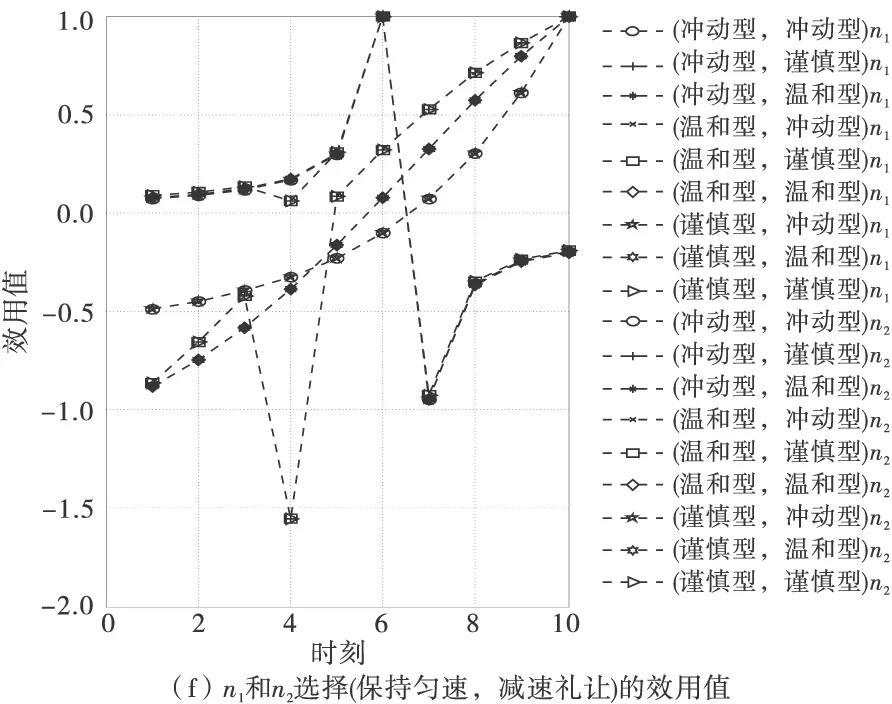

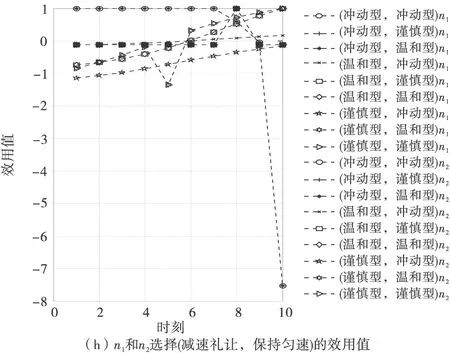
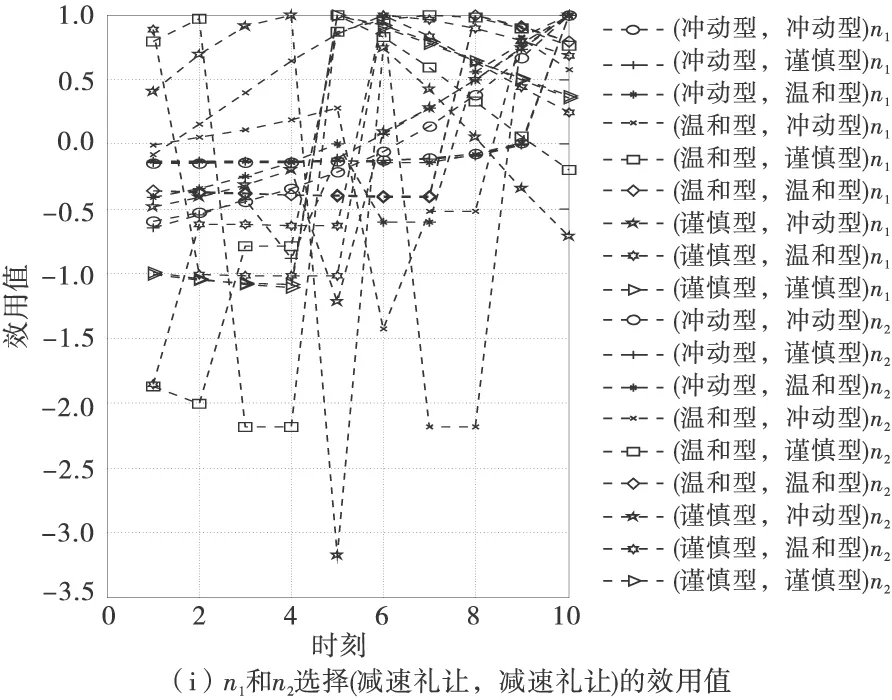
圖2 不同駕駛員類型和策略下n1與n2的效用值
由圖2可見:以n1與n2選擇(加速搶先,加速搶先)策略為例,若n1與n2為(沖動型,沖動型),在前3個時間段內,n1與n2的效用值呈下降趨勢,且在時刻4達到下峰值,n1與n2之間存在交通沖突且交通沖突越來越嚴重,時刻4~時刻5,n1與n2的效用值呈上升趨勢且到達上峰值,n1與n2之間的交通沖突逐漸得到緩解,時刻5~時刻9,n1與n2的效用值呈下降趨勢,n1與n2之間不存在交通沖突但效用值在逐漸減小,時刻9之后n1與n2的效用值均在小范圍內波動基本趨于穩定,n1與n2之間不存在交通沖突。在整個時間段內,n1的效用值變化在時刻4最為突出,改變行為策略的可能性較大,n2的效用值變化在時刻5最為突出,改變行為策略的可能性較大。
若n1與n2為(沖動型,謹慎型),在前3個時間段內,n1的效用值呈上升趨勢且到達上峰值,n2的效用值呈下降趨勢,時刻4~時刻5,n1與n2的效用值均呈下降趨勢且n1的效用值到達下峰值,時刻5~時刻6,n1的效用值呈上升趨勢,n2的效用值呈下降趨勢且到達下峰值,時刻6~時刻7,n1與n2的效用值均呈上升趨勢且n2的效用值到達上峰值,時刻7之后n1與n2的效用值均在小范圍內波動基本趨于穩定。在整個時間段內,n1的效用值變化在時刻4最為突出,改變行為策略的可能性較大,n2的效用值變化在時刻6最為突出,改變行為策略的可能性較大,同理分析知,若n1與n2為(沖動型,溫和型),n1與n2安全通過沖突點的可能性較大,所以n1與n2在博弈開始時可能選擇(加速搶先,加速搶先)策略。
分析圖2知,對于不同的駕駛員性格類型組合與不同的行為策略,n1與n2改變策略的時刻也各有差異,如沖動型的駕駛員選擇(加速搶先,加速搶先)策略時,其改變行為策略集中在時刻4和時刻5,溫和型的駕駛員選擇(加速搶先,加速搶先)策略時,其改變行為策略集中在時刻5和時刻6,因此,不同的駕駛員性格類型組合,在不同的時刻的最優行為策略也有較大差異,對他們通過交叉路口時給出的建議也會有所不同。
對于(沖動型,沖動型)的駕駛員組合,為了確保安全的通過交叉路口,雙方應盡量減慢車速,在每一個決策時間段內,通過對方的決策行為適時改變自己的決策,分析表明,在博弈開始的前幾個決策時間段內,駕駛員雙方選擇(保持勻速,減速禮讓)的可能性很大,在之后的幾個決策時間段內選擇(加速搶先,保持原速),博弈過程即將結束的幾個決策時間段內選擇(加速搶先,減速禮讓)安全通過交叉路口;對于(沖動型,溫和型)的駕駛員組合,分析圖2中駕駛員效用值變化趨勢,雙方在整個博弈過程中的決策行為與(沖動型,沖動型)的駕駛員組合的決策行為大致相同。
同理,根據不同的駕駛員性格類型組合在每個時刻的決策行為可以看出,沖動型的駕駛員在各決策時間段內選擇加速搶先的可能性較大;溫和型的駕駛員在各決策時間段內偏好選擇加速搶先、保持勻速,謹慎型的駕駛員在各決策時間段內偏好選擇保持勻速、減速禮讓。通過模擬表明,模型能很好的反映沖突車輛間不同性格的駕駛員所做的決策。
4 結 語
根據車輛通過無信號交叉口過程中不同駕駛員間的決策行為相互作用關系,將車輛間的沖突時間分成若干個更小的時間段,分析駕駛員在每一時間段內的策略行為。在重復博弈下,分析影響駕駛員決策行為的性格因素,建立不同策略之間相對勢因素的效用函數,從博弈角度探討駕駛員在交叉行進過程中的決策行為,建立了基于動態重復博弈下無信號交叉口的駕駛員行為策略模型,通過分析不同駕駛員決策行為組合的效用,確定博弈過程中存在Nash均衡,得到動態博弈中駕駛員的最優決策行為。
筆者提出的模型能夠在一定程度上反映不同條件下駕駛員行為的變化過程,為研究沖突車輛通過無信號交叉路口時駕駛員的決策行為提供了理論參考。另外,可以改善無信號交叉口的通行效率、減少無信號交叉口交通事故、減少交叉口的行車延誤、提高整體交通安全水平,但在建模過程中只考慮2輛車的博弈過程,并且對影響模型的相關因素做了相應的簡化,更為合理的多車博弈模型,以及應用實例的實證模擬需要將來進一步研究。
[1] Gheorghiu A,Havarneanu C.Driving behaviour of a sample of young Romanian drivers[J].Procedia-Social and Behavioral Sciences,2011,33(1):697-701.
[2] Casucci M,Marchitto M,Cacciabue P C.A numerical tool for reproducing driver behaviour:experiments and predictive simulations[J].Applied Ergonomics,2009,41(2):198-210.
[3] Vingilis E,Seeley J,Wiesenthal D L,et al.Street racing video games and risk-taking driving:an internet survey of automobile enthusiasts[J].Accident Analysis and Prevention,2013,50(1):1-7.
[4] Türker ?zkan,Timo Lajunen T,Joannes E l,et al.Cross-cultural differences in driving behaviors:a comparison of six countries[J].Transportation Research Part F:Psychology and Behavior,2006,9(3):227-242.
[5] Murat Demir,Abdullah ?avu.A new driver behavior model to create realistic urban traffic environment[J].Transportation Research Part F:Psychology and Behavior,2012,15(3):289-296.
[6] Chen Chang-Kuna,Li Jian,Zhang Dong.Study on evacuation behaviors at a T-shaped intersection by a force-driving cellular automata model[J].Physica A:Statistical Mechanics and its Applications,2012,391(7):2408-2420.
[7] 王曉原,邢麗.機非混行環境下駕駛員行為建模及仿真[J].中國公路學報,2009,22(2):98-104. Wang Xiaoyuan,Xing Li.Modeling and simulation for driving behavior in mix-traffic environment[J].China Journal of Highway and Transport,2009,22(2):98-104.
[8] 陳富堅,郭忠印,柳本民,等.基于博弈論的道路交叉口信號燈設置標準[J].同濟大學學報:自然科學版,2011,39(6):830-836. Chen Fujian,Guo Zhongyin,Liu Benmin,et al.Game analysis of standards for setting traffic signal lights at road intersection[J].Journal of Tongji University:Natural Science,2011,39(6):830-836.
[9] 郭偉,楊明,王冰,等.基于博弈論的路口多車協作算法[J].華中科技大學學報:自然科學版,2011,39(增刊2):385-391. Guo Wei,Yang Ming,Wang Bing,et al.Game theory based cooperative driving algorithm for intersection[J].Journal of Huazhong University of Science and Technology:Natural Science 2011,39(Sup2):385-391.
[10] 劉小明,王秀英.基于重復博弈的無燈控交叉口駕駛員行為模型[J].中國公路學報,2011,24(4):94-100. Liu Xiaoming,Wang Xiuying.Vehicle-cross action model in intersection without traffic light based on reduplicate game[J].China Journal of Highway and Transport,2011,24(4):94-100.
[11] 張鄰,杜文,向紅艷.基于合同模式交通分配模型和求解算法[J].公路交通科技,2010,27(2):97-102. Zhang Lin,Du Wen,Xiang Hongyan.Traffic assignment model and solution algorithm in transportation network based on contract model[J].Journal of Highway and Transportation Research and Development,2010,27(2):97-102.
[12] 魏連雨,李壯.基于路網特征的高速公路計重收費費率確定[J].重慶交通大學學報:自然科學版,2014,33(6):122-126. Wei Lianyu,Li Zhuang.Determination of freeway weight toll rate based on network characteristics[J].Journal of Chongqing Jiaotong University:Natural Science,2014,33(6):122-126.
Analysis of Traffic Conflict in Non-Signalized Intersection
Zhang Lin, Huang Xuanwei, Wu Weiming
(College of Mathematics and Information Science, Nanchang Hang Kong University, Nanchang 330063, Jiangxi, China)
In order to study the driver’s decision-making behaviors of the conflict vehicles in non-signalized intersection, according to the driver’s personality factors and the relative potential factors in the different strategies which affect the driver to make decisions, as well as the time refinement, the utility function of the driver’s behaviors based on the dynamic reduplicate game theory was built up from the view of game theory. As the decision-making behavior by the driver in the process of cross-road, analyzing the different combination of the utility of the driver’s decision-making behavior, Nash equilibrium was existed in a single game process, and the driver’s optimal decision behaviors in a dynamic game was obtained. The illustration shows that impulse drivers in the decision-making period of time are more willing to choose to accelerate the first strategy; mild drivers prefer to choose accelerate the preemptive strategy or maintain uniform strategy; cautious drivers prefer to choose to maintain uniform strategy or deceleration comity strategy.
traffic engineering; non-signalized intersection; reduplicate game; traffic conflict; Nash equilibrium
10.3969/j.issn.1674-0696.2015.03.22
2013-12-28;
2014-02-27
國家自然科學基金項目(51368046,71161005);江西省教育廳科學技術研究項目(GJJ11518)
張 鄰(1973—),男,安徽廬江人,副教授, 博士,主要從事交通規劃方面的研究。E-mail:zagln0@163.com。
U491
A
1674-0696(2015)03-105-07
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
電子制作(2018年11期)2018-08-04 03:25:42
數學大世界(2018年1期)2018-04-12 05:39:14
公民與法治(2016年4期)2016-05-17 04:09:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25