基于模型參考的多自主水下航行器自適應覆蓋控制
2015-06-05 15:31:25嚴衛生崔榮鑫
系統工程與電子技術 2015年11期
嚴衛生,左 磊,崔榮鑫
(西北工業大學航海學院,陜西西安710072)
基于模型參考的多自主水下航行器自適應覆蓋控制
嚴衛生,左 磊,崔榮鑫
(西北工業大學航海學院,陜西西安710072)
針對海洋監測過程中由水下粘滯物等因素引起系統模型參數變化的情況,提出了一種基于模型參考的多自主水下航行器(autonomous underwater vehicles,AUV)自適應覆蓋控制方法,旨在合理分配多AUV資源,提高目標海域的監測效率。首先根據給出的系統代價函數,應用質心Voronoi分配原則對目標海域進行最優分配,確定多AUV最優監測目標。在此基礎上,利用基于模型參考的自適應控制方法,設計在AUV模型參數未知的情況下,多AUV的最優覆蓋控制方法,使得覆蓋網絡能夠從任意初始位置收斂到最優覆蓋配置。最后通過仿真實驗驗證了上述算法的可行性與有效性。
自主水下航行器;海洋監測;最優覆蓋控制;模型參考控制;自適應控制
0 引 言
近年來,多智能體最優覆蓋控制得到了國內外研究學者的廣泛關注[1-5]。多智能體最優覆蓋控制是一種面向任務的最優區域分配方法。該方法根據目標環境的任務信息,合理有效地分配多智能體資源,具有任務針對性強,資源利用率高等特點。
目前,多智能體覆蓋控制研究多集中在移動機器人領域,其中文獻[6]研究在環境信息密度函數未知情況下的最優覆蓋問題,通過參數估計的方法實現對目標環境的最優覆蓋;文獻[7]針對多智能體協同覆蓋目標區域的特性,采用鄰居通信的信息傳播方式,以競爭監測區域的手段,不斷更新其Voronoi區域與最優目標,進而達到最優覆蓋;文獻[8]針對混合系統,研究當智能體始終保持前向速度時,目標區域的覆蓋觀測方法。盡管最優覆蓋控制在多機器人領域取得一定的研究成果,以多自主水下航行器(autonomous underwater vehicles,AUV)為執行機構的水下最優覆蓋方法尚處于初級階段。如文獻[9]利用多AUV組成監測網絡,并根據已知的航行軌跡提出了基于離散信息預測方法的多AUV多目標最優覆蓋控制方法;文獻[10]研究了基于側掃聲納的多AUV最優覆蓋控制問題,設計出了一種航行消耗少、監控區域廣的最優航行軌跡,提高了多AUV覆蓋網絡的監測效率;文獻[11]針對水下環境預測誤差大的問題,以水下滑翔機為執行機構,提出了一種基于最小二乘法的最優覆蓋方法。
相對于已有的最優覆蓋研究成果,本文從工程實踐出發,綜合考慮由水下環境中的雜質粘滯而導致AUV模型參數變化的情況,提出了基于AUV參考模型的最優覆蓋控制方法。該方法根據多AUV最優分配策略,利用標準AUV的參考模型,設計自適應控制參數并給出最優覆蓋控制策略。本文提出的多AUV最優覆蓋算法有效地增強了AUV覆蓋網絡的魯棒性,充分地提高了水下監測精度,成功地解決了由AUV模型參數不確定引起的航行誤差,具有重要的工程應用價值與理論研究意義。
本文首先定義了多AUV網絡對目標區域進行分配的代價函數,明確了最優覆蓋的目標。其次,提出了AUV模型參數已知的最優覆蓋控制算法。在此基礎上,設計基于模型參考的多AUV自適應覆蓋方法。最后,通過實驗仿真的手段驗證了基于模型參考的多AUV自適應覆蓋算法的可行性與穩定性。
1 問題描述
針對平面內的欠驅動AUV模型,在忽略重力、流體粘滯力等因素的情況下,AUV的二階Euler-Lagrange模型為

考慮由N艘AUV組成的覆蓋網絡監測凸多邊形區域Q∈R2。q∈Q表示監測區域內任意一點。φ(q):Q→R+描述監測區域內測量信息的信息密度。
為了實現最優覆蓋控制,定義第i條AUV對其監測區域的覆蓋代價函數為

因此,多AUV覆蓋網絡的代價函數為

根據覆蓋控制的定義,本文的目的在于當AUV模型參數未知時,提出每艘AUV的最優監測區域并設計相應的控制算法,使得多AUV覆蓋網絡能夠從任意初始位置收斂到最優位置,實現代價函數H(P)趨向最小值的目標。
為了突出覆蓋算法的可行性與高效性,假設每艘AUV都具有航行、通信、監測以及計算功能。區域的密度函數φ(q)和多AUV覆蓋網絡的位置P為全局已知的。
2 模型參數未知下的最優覆蓋控制
2.1 理想狀態下的最優覆蓋控制算法
根據文獻[1],覆蓋網絡的最優覆蓋區域為由當前系統位置產生的Voronoi區域,最優覆蓋區域內的最優位置為其質心。因此,根據式(2),多AUV覆蓋網絡的Voronoi區域定義為

式中,i,j∈N。
根據目標區域內的密度信息節φ(q),Voronoi圖的質量與質心分別表示為
式中,q∈Vi,i∈N。
因此,理想狀態下的多AUV覆蓋過程為:根據當前多AUV分布狀態計算覆蓋網絡的最優監測區域Vi,并給出質心。然后驅動每艘AUV航向其最優目標。
由于連續系統中P是時變的,因此每艘AUV的最優監測區域Vi也是時變的。針對每艘AUV而言,覆蓋監測的過程即是追蹤最優目標的過程,多AUV網絡的最優監測狀態為每艘AUV到達其最優覆蓋目標。
針對每艘AUV的最優覆蓋控制過程,設計每艘AUV的控制律為

式中,Kpi,Kdi為反饋增益系數,i∈N。
定理1理想情況下,多AUV網絡對目標區域Q進行覆蓋監測時,以式作為控制律,多AUV系統能夠從目標區域內的任意位置收斂到最優覆蓋監測位置。
證明令

將控制律式(6)代入式(1),二階AUV狀態方程可表示為

定義李雅普諾夫函數為

顯然V≥0,對V求導得
將式(7)代入式(9),得

由于M(P)為對稱矩陣且˙M(P)-2C(P,˙P)為反對稱矩陣,式(10)可化簡為

根據Laselle不變集理論,多AUV覆蓋網絡將一致趨向于其最大不變集。即,在控制律τi的驅動下,多AUV監測網絡將收斂于最優監測區域內的最優位置。
證畢
2.2 模型參數未知下的最優覆蓋控制算法
針對由水中粘滯物等因素導致AUV模型參數未知的問題,本文采用基于模型參考的自適應覆蓋算法,控制多AUV系統穩定實現對目標區域的最優覆蓋監測。
以式(1)作為參考模型,定義AUV二階Euler-Lagrange參考模型為

式中

定義真實狀態與參考模型的狀態誤差為

令
將式(12)與式(13)變換為基于狀態誤差的Euler-Lagrange狀態方程

基于模型參考的多AUV自適應系統由Kc,F組成,通過調節Kc,F使多AUV覆蓋網絡穩定收斂于最優監測目標。

由式(15)與式(16)可得

將式(17)代入式(15),化簡得

定義李雅普諾夫函數為

式中,Vm如式(8)所示;Γ1,Γ2均為正定對稱矩陣;tr表示矩陣的跡。
由式(8)及Γ1,Γ2的正定性可知:V2≥0。對V2求導,得
根據矩陣跡的性質,式(20)可化簡為

因此多AUV覆蓋網絡基于模型參考的自適應控制律為

航行輸入為

式中,u=[u1,…,uN]。
定理2當AUV模型參數未知時,采用式(23)與式(24)所示的自適應控制律,多AUV覆蓋網絡能夠從目標區域內的任意位置收斂到最優覆蓋位置。
證明由于該自適應系統是基于李雅普諾夫穩定性理論設計的控制方法,在設計過程中始終保持V正定,˙V負定。根據Laselle不變集理論,多AUV覆蓋網絡將一致趨向于最優覆蓋區域。
證畢
3 實驗仿真
假設多AUV監測網絡由16艘AUV組成,每艘AUV的數學模型如式(1)所示,其中AUV的參考模型參數為
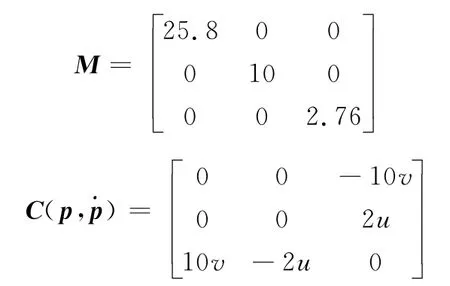
待監測區域為10 km×10 km的水下區域,其信息密度函數為φ(q)=exp(x+y)。理想狀態下控制律的反饋增益系數分別為Kp=0.6,Kd=1。自適應變量Kc與F的初始值分別為Kc=0,F=0。
多AUV監測網絡的初始位置隨機分布在監測區域內,以式(23)、式(24)作為自適應控制輸入,仿真結果如圖1所示。
圖1中圓點表示多AUV覆蓋網絡的初始位置,三角表示最優監測位置。AUV的航行軌跡如圖中實線所示。由虛線構成的Voronoi圖表示多AUV覆蓋網絡的最優監測區域。圖1所示仿真結果表明在自適應控制律式(23)與式(24)的作用下,多AUV覆蓋網絡能夠從監測區域內的任意位置收斂到最優覆蓋位置,其中具體的參數變化規律如圖2~圖4所示。

圖1 AUV最優覆蓋航行軌跡
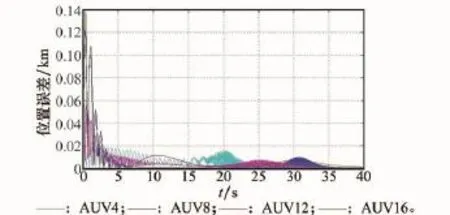
圖2 模型參考估計誤差

圖3 模型參數未知下的質心誤差
為了清晰顯示仿真結果,圖2~圖4的仿真結果為多AUV網絡中隨機選取的4艘AUV的狀態響應結果。圖2為廣義狀態誤差e隨時間的響應曲線。該仿真結果表明,隨著時間的推移,模型參數未定的AUV航行狀態間逐漸趨向于參考模型的航行狀態。圖3為多AUV覆蓋系統的航行位置與最優監測目標的距離誤差響應曲線。由此實驗結果可知:多AUV覆蓋網絡能夠在有限時間內穩定地趨近最優監測目標,實現對目標監測區域的最優監測區域分配。
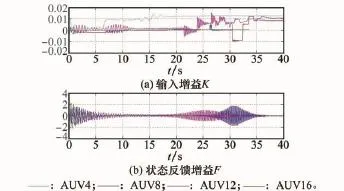
圖4 自適應控制參數響應
圖4所示為基于模型參考的自適應增益參數響應曲線,其中圖4(a)為輸入增益Kc隨時間的響應曲線,圖4(b)為狀態反饋增益F的變化規律。如圖4(a)所示,每艘AUV的最終輸入增益Kc雖然都不相同,但能夠在有限時間內趨近于某一穩定的數值。圖4(b)中的狀態反饋增益F在有限時間內趨向0,這也驗證了本文提出的基于模型參考的自適應覆蓋算法的正確性。
4 結 論
本文針對多AUV對目標海域實施監測過程中的區域分配問題,提出了當AUV模型參數未知時,多AUV監測網絡的最優覆蓋控制方法。首先通過定義多AUV覆蓋網絡對目標海域進行區域監測的代價函數,定量地描述多AUV網絡分配策略的優劣,有效地將區域配置問題轉化為求代價函數的極值問題。其次,針對AUV的欠驅動特性,給出了參考模型下的多AUV最優覆蓋控制算法。在此基礎上,設計基于模型參考的多AUV自適應覆蓋算法,證明其穩定性并實現系統模型未知下的多AUV對目標海域的最優監測。最后,通過仿真實驗的手段驗證了本文提出的最優覆蓋算法的可行性與穩定性。
[1]Cortes J,Martinez S,Karatas T.Coverage control for mobile sensing networks[J].IEEE Trans.on Robotics and Automation,2003,20(1):243- 255.
[2]Yi P,Zou F,Jiang X,et al.Multi-agent cooperative intrusion response in mobile ad-hoc networks[J].Journal of Systems Engineering and Electronics,2007,18(4):785- 794.
[3]Cui R,Sam G S,Voon Ee How B,et al.Leader-follower formation control of underactuated autonomous underwater vehicles[J].Ocean Engineering,2010,37(17):1491- 1502.
[4]Yan W S,Zuo L,Cui R,et al,A coverage algorithms for multiple autonomous surface in flowing environment[J].International Journal of Control,Automation and Systems,to be published.
[5]Wang Y Q,Wu Q,Wang Y,et al.Consensus algorithm for multiple quadrotor systems under fixed and switching topologies[J].Journal of Systems Engineering and Electronics,2013,24(5):818- 827.
[6]Schwager M,Rus D,Slotine J J.Decentralized,adaptive coverage control for networked robots[J].The International Journal of Robotics Research,2009,28(3):357- 375.
[7]Bullo F,Carli R,Frasca P.Gossip coverage control for robotic networks:dynamical systems on the space of partitions[J].SIAM Journal on Control and Optimization,2012,50(1):419- 447.
[8]Kwok A,Martinez S.Unicycle coverage control via hybrid modeling[J].IEEE Trans.on Automatic Control,2010,55(2):528- 532.
[9]Paull L,Saeedi S,Seto M,et al.Sensor driven online coverage planning for autonomous underwater vehicles[C]∥Proc.of the IEEE/RSJ International Conference on Intelligent Robots and Systems,2012:2875- 2880.
[10]Choi M H.Optimal underwater coverage of a cellular region by autonomous underwater vehicle using line sweep motion[J].Journal of Electrical Engineering&Technology,2012,7(6):1023- 1033.
[11]Zhu X K,Yu J C,Wang X H.Adaptive coverage sampling of underwater glider[J].Robot,2012,34(5):566- 573.(朱心科,俞建成,王曉輝.水下滑翔機自適應覆蓋采樣[J].機器人,2012,34(5):566- 573.)
[12]Spong M W,Hutchinson S,Vidyasagar M.Robot modeling and control[M].New York:Wiley,2005.
左 磊(198-9- ),男,博士研究生,主要研究方向為水下航行器協同覆蓋控制。
E-mail:zuolei101004@163.com
崔榮鑫(1982- ),男,教授,博士,主要研究方向為多機器人系統、水下航行器導航。
E-mail:rongxin.cui@gmail.com
Model based adaptive coverage control for multiple autonomous underwater vehicles
YAN Wei-sheng,ZUO Lei,CUI Rong-xin
(School of Marine Science and Technology,Northwestern Polytechnical University,Xi’an 710072,China)
The model adaptive coverage control problems with unknown model parameters are studied.A novel model based adaptive coverage control strategy for multi-autonomous underwater vehicle(AUV)systems is proposed such that the coverage network would converge to the optimal deployment.Firstly,according to the proposed cost function and the Voronoi partition,the mission region is divided into subregions optimally with respect to the multi-AUV systems.Using this region partition and model based adaptive control as the theoretical foundation,an optimal adaptive coverage control algorithm with unknown model parameters is proposed to deploy the coverage network to the optimal positions.Finally,numerical simulations are provided to illustrate the feasibility and effectiveness of the proposed approaches.
autonomous underwater vehicle(AUV);ocean monitoring;optimal coverage control;model based control;adaptive control
O 232
A
10.3969/j.issn.1001-506X.2015.11.23
嚴衛生(1968- ),男,教授,博士研究生導師,博士,主要研究方向為水下航行器導航與協同定位。
E-mail:wsyan@nwpu.edu.cn
1001-506X(2015)11-2574-05
2014- 09- 05;
2014- 11- 20;網絡優先出版日期:2015- 06- 18。
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150618.1523.011.html
國家自然科學基金(51579210,61472325,51209164);西北工業大學博士論文創新基金(CX201418)資助課題
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52