籠型異步電機能效辨識方法對比
2015-06-05 09:51:54李建軍汪玉山
電機與控制應用 2015年5期
李建軍, 王 慶, 汪玉山
(1. 河北新四達電機制造有限公司,河北 石家莊 052160;2. 江蘇電力節能服務有限公司,江蘇 南京 210019;3. 上海電機系統節能工程技術研究中心有限公司,上海 200063)
籠型異步電機能效辨識方法對比
李建軍1, 王 慶2, 汪玉山3
(1. 河北新四達電機制造有限公司,河北 石家莊 052160;2. 江蘇電力節能服務有限公司,江蘇 南京 210019;3. 上海電機系統節能工程技術研究中心有限公司,上海 200063)
對不同三相異步電機效率在線辨識方法精度分別進行研究,并改進傳統T型等效電路算法。以一臺5.5kW、4極異步電機為例,對提出的方法進行了試驗驗證,結果表明利用氣隙轉矩法辨識電機效率具有較高精度。不同方法試驗數據的比較分析為工程實際電機能效在線辨識提供了重要參考。
異步電機; IEEE 112B法; 精度; 在線辨識; 能效
0 引 言
電機運行效率在線評估是電機系統能效評估的重要環節,利用電機輸入功率和輸出機械功率求取電機實時運行效率。但現場中電機輸出功率不能根據電機機端電氣量直接獲取,導致電機效率無法精確辨識。鑒于異步電機用電量占全部電機用電量85%以上,本文對多種電機能效辨識方法進行研究。
國內外有關籠型異步電機能效辨識方法[1-8]的文獻很多,目前普遍使用IEEE 112B能效測試方法是標準能效測試方法中不確定度最低的方法,電機能效判定或試驗中普遍采用該方法。該方法通過在電機和負載之間安裝扭矩儀,實現對轉矩和轉速的精確測量,進而求得電機效率。但工程實際中扭矩儀的安裝過程十分繁瑣,使得電機轉子軸輸出機械轉矩難以直接測出,導致輸出機械功率求解十分困難。
電機能效辨識方法包含基本方法或結合不同基本方法。本文根據每種方法原理和誤差精度對不同方法分開比較研究。這有助于工作人員根據現場實際情況選出有助于測試電機能效的方法。其中辨識能效主要基本方法包括: 銘牌法、轉差率法、電流法、損耗分析法、等效電路法、氣隙轉矩法。
對于上述所說結合不同基本方法能效辨識,以電流法為例,就是結合銘牌法與實測統計電機數據改進法。如果結合得當,這種不同基本方法相結合有助于電機能效辨識精度的提高。
所有方法的能效計算公式都可用式(1)表示:
η=P2/P1
(1)
式中:P2——輸出功率;P1——輸入功率。
1 籠型異步電機效率辨識法
由于現場條件下電機能效評估或測試特殊性,測試方法與標準方法有所不同。使用者往往通過銘牌數據了解電機效率,但是銘牌效率為電機額定條件下效率,而實際運行的負載并不是恒定不變的。另外,實際工程現場中有相當一部分電機內部曾被改動,例如更換定轉子繞組,其額定負載性能也與銘牌數據不同,因此希望通過一些簡單的方法能在使用現場測得電機實際運行時的效率。因為效率由電機的輸出功率與輸入功率的比值來衡量,而輸入功率從電源輸入端可相對較容易地測定,關鍵在于如何測定電機軸端的輸出功率。傳統的電機效率現場測試方法有如下幾種。
1.1 銘牌法
通過電機銘牌數據直接獲取電機能效是最簡單的現場能效辨識方法。該方法假定電機效率為常值且與銘牌數據相關,電機銘牌數據是電機在滿載、額定電壓情況下的數據。對于效率負載曲線較為平滑的電機來說,這種方法較為適用。但實際工程中電機機端電壓與負載不斷變化,尤其對于小功率、多極數的電機,電機的效率也會隨著電壓與負載的變化更大,不同極電機效率負載曲線如圖1所示[9]。
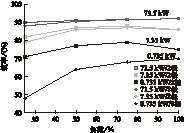
圖1 不同功率極對數電機效率負荷曲線
從圖1可看出,不同極對數及功率電機的效率負載曲線并不都是平滑曲線,利用銘牌法計算所得電機效率并不能真實反映實際情況。另外如果電機經過更換定轉子繞組等維修,銘牌數據不能代表實際狀態,那么這種方法所得的效率誤差很大。
1.2 轉差率法
轉差率法假定電機負載與額定負載的比值等于轉差率與額定負載轉差率比值,則電機輸出功率為
P2=(s/sN)PN
(2)
式中:s——測量轉差率;sN——額定負載轉差率;PN——額定功率。
轉差率法只需在現場通過光感測速計獲取電機轉子轉速即可實現,操作簡單。但是,在實際工程中電機轉速會受到負載的影響,一般容許電機的實際轉差率與額定轉差率有±20%的偏差,尤其在輕載情況下,電機轉速基本接近同步轉速,這樣電機的轉差率誤差很大,對效率的辨識產生較大誤差。
1.3 電流法
電流法假定電機負載與額定負載的比值等于電機電流與額定負載電流的比值,因此,電機軸端輸出功率可表示如下:
P2=(I/IN)PN
(3)
式中:I——實測定子電流;IN——額定負載電流。
由于電機定子電流中包含空載電流,且這部分電流不隨負載的變化而變化,因此為了避免產生較大誤差,應當對電機進行空載試驗,測取空載電流,進而可以得出電機輸出功率為
P2=[(I-I0)/(IN-I0)]PN
(4)
式中:I0——空載電流。
圖2所示為感應電機圓圖,從圖2中可看出其不同負荷下電流相對電壓的變化關系。
根據感應電機原圖和電流法能效計算式(3)和式(4),可以得到采用式(3)和式(4)的負荷電流曲線如圖3所示。

圖2 感應電機圓圖
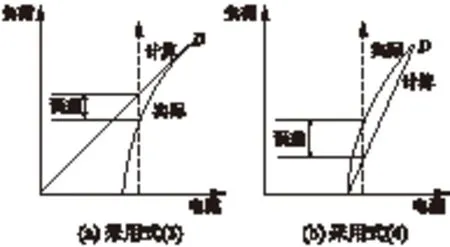
圖3 負荷電流曲線
從圖3可看出,式(3)在低負載時過高地估計了負荷值,式(4)往往計算所得負載較實際負荷低,因此最好的方法是將以上兩式所獲得軸端輸出功率取平均值,就能較好地接近電機實際情況的負載。應該指出,對于一般通用的異步電機,其銘牌電流值與實際滿載電流值可能有10%的偏差,從而使這種方法的準確性受到較大影響。
1.4 損耗分析法
損耗分析法根據電機定子銅耗、轉子銅耗、鐵耗、雜散損耗和風摩耗與輸入功率之間的關系求取電機的輸出功率。由于現場條件下并不能完全獲得這些損耗值,因此該方法經常與前述方法相結合,通過對電壓、電流、輸入功率、繞組電阻和轉速的測定,結合一些經驗數據,然后求得五項損耗數值,從而求得電機效率。這種方法與IEEE 112E法比較相近,但需要一臺電機與被試電機用聯軸器聯結,輔助電機施以額定頻率、額定電壓,在試驗過程中,頻率和電壓應保持不變,且需要做反轉試驗來求取電機雜散損耗。這種方法試驗要求高,在現場不易實現。本文采用IEC法估算電機雜散損耗的方法,規定額定負載時的雜散損耗約為電機額定輸入功率的0.5%。
具體方法如下:
(1) 定子銅耗Pcu1=3I12R1;
(2) 鐵耗Pfe=(E1/E2)2Pofe,Pofe為空載鐵耗;
(3) 電磁功率PM=P1-pcu1-Pfe;
(4) 轉子銅耗Pcu2=sPM;
(5) 雜散損耗Pa約為額定輸入功率的0.5%;
(6) 風摩耗Pfw由空載試驗獲得。
由上可得電機輸出功率為
P2=P1-Pcu1-Pcu2-Pfe-Pfw-Pa
(5)
1.5 等效電路法
等效電路法辨識電機效率建立在等效電路的6個參數之上,即定子電阻R1、轉子電阻R2、定子漏電抗X1、轉子漏電抗X2、激磁電阻Rm和激磁電抗Xm,如圖4所示。
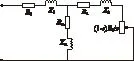
圖4 異步電機等效電路
等效電路法的優點在于若等效電路的6個參數已知,便可求得任何負載情況下的電機效率。等效電路的參數并不是恒定不變的,比如轉子電阻,因為電機轉速由滿載到空載之間變化較大,且由于鼠籠深槽效應和磁滯飽和等因素的影響,所以等效電路參數的求取尤為重要。這些參數可以通過空載試驗和堵轉試驗獲得,然后利用有關參數與電機機端電氣量可求得不同轉速情況下的輸入功率、輸出功率及效率。這種方法與IEEE 112F法比較相近,其中雜散損耗是按照IEC法估算求得。
基于上述方法,空載試驗和短路試驗所測得的轉子電阻、電抗并不能反映實際狀況下電機的參數,就導致電機效率估算出現較大偏差。為此,提出一種基于可測電氣量的轉子電阻、電抗辨識方法。
根據T型等效電路求取電機總阻抗:
(6)
從路的方法出發,求取電機的總阻抗為
(7)
進而求得電機的轉子電抗為:
(8)
式中:U——輸入電壓;I——輸入電流;Z2——轉子阻抗;Rm——激磁電阻;Xm——激磁電抗;R1——定子電阻;X1——定子電抗。
與前述方法相比,傳統T型等效電路在空載和堵轉運行條件下對電機的T型等效電路做了理想化近似,空載時忽略了轉子回路,堵轉時忽略了勵磁回路。這種近似必然會引入誤差。新型T型等效電路通過電機可測電氣量求解電機的轉子阻抗,避免了上述因素引起的誤差,大大增加了電機效率辨識的精度。
1.6 氣隙轉矩法
在估算輸出轉矩的過程中,首先測試輸入端電壓和電流,得出Δt時間內的平均輸入功率P1[6]:
(9)
其中:
(10)
式中:ua、ub、uc——電動機相電壓;ia、ib、ic——電動機相電流。
將式(10)代入式(9)中可得
(11)
其中,輸入功率減去鐵耗和銅耗等項后可得氣隙轉矩方程式如下:
(12)
式中:ψCA、ψAB——分別代表t時刻線電壓uCA和uAB對應的繞組磁鏈。
(13)
式中:ψCA(0)、ψAB(0)——線電壓uCA、uAB對應的繞組的初始磁鏈;
iA、iB——線電流;
uCA、uAB——線電壓;
R——線間電阻值;
P——電機極對數。
圖5為氣隙轉矩法試驗圖。
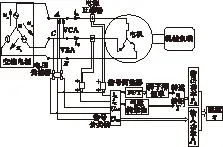
圖5 氣隙轉矩法流程圖
通過以上分析可知,將氣隙轉矩減去機械損耗和負載雜耗所對應轉矩即可求出電機輸出轉矩,進而求得電機輸出功率:
P2=Tgap×2πn/60-Pfw-Pa
(14)
根據上述求取電機輸出轉矩可知,電機風摩耗Pfw和Pa并不能從電機的機端電氣量中直接獲取,所以氣隙轉矩法仍需進行空載試驗,這在工程實際中有點困難,但可以根據經驗進行估算。氣隙轉矩法的優點在于可以通過電機機端電氣量直接求取輸出轉矩,而不必考慮電機不平衡等因素。
2 試驗驗證
根據有關分析,一般認為采用較準確的試驗方法(如IEEE 112-B)進行試驗。其試驗值與設計值的差別將受到下面三方面因素的影響:
(1) 設計計算準確性,影響效率精度為±0.5%;
(2) 制造和材料波動,影響效率精度為±0.5%;
(3) 試驗精度,影響效率精度為±0.5%。
由此可見,效率設計值和試驗值的最大偏差可達±1.5%。
各種電機效率現場測試方法中,轉矩法不確定度最低。該方法將轉矩傳感器代替聯軸器安裝在電動機與負載設備之間,通過電機輸出轉矩和轉速直接測定求取電機效率,該效率包含難以直接測量的風摩耗、負載雜耗等,因此原理上最準確,其測量精度約為±1%(對應制造波動和試驗誤差)。這種方法雖然精度較高,但在現場很難實施,本文中主要作為試驗精度比較的一個參照基準。
對電機效率現場測試方法比較,除了準確性之外,還應考慮現場實施可行性和經濟性。例如某些電機運行現場,不允許將電動機與被驅動機械在機械連接上分解,也沒有可改變電壓的電源,因此就不可能進行空載試驗來確定鐵耗和風摩耗,一些精度尚可的測試方法,如等效電路法和損耗分析法較難實現,通常將這些方法與統計法結合,使用損耗或參數的統計數據,既提高了方法的可操作性,又具有一定的準確度。
對一臺Y132S-4、5.5kW,定轉子槽數為36/32異步電機,對其在不同電壓不同負載時的電機效率進行比較,如表1所示。其中空載電流I0為2.9A,額定轉速為1440r/min,額定電流IN為11.64A。
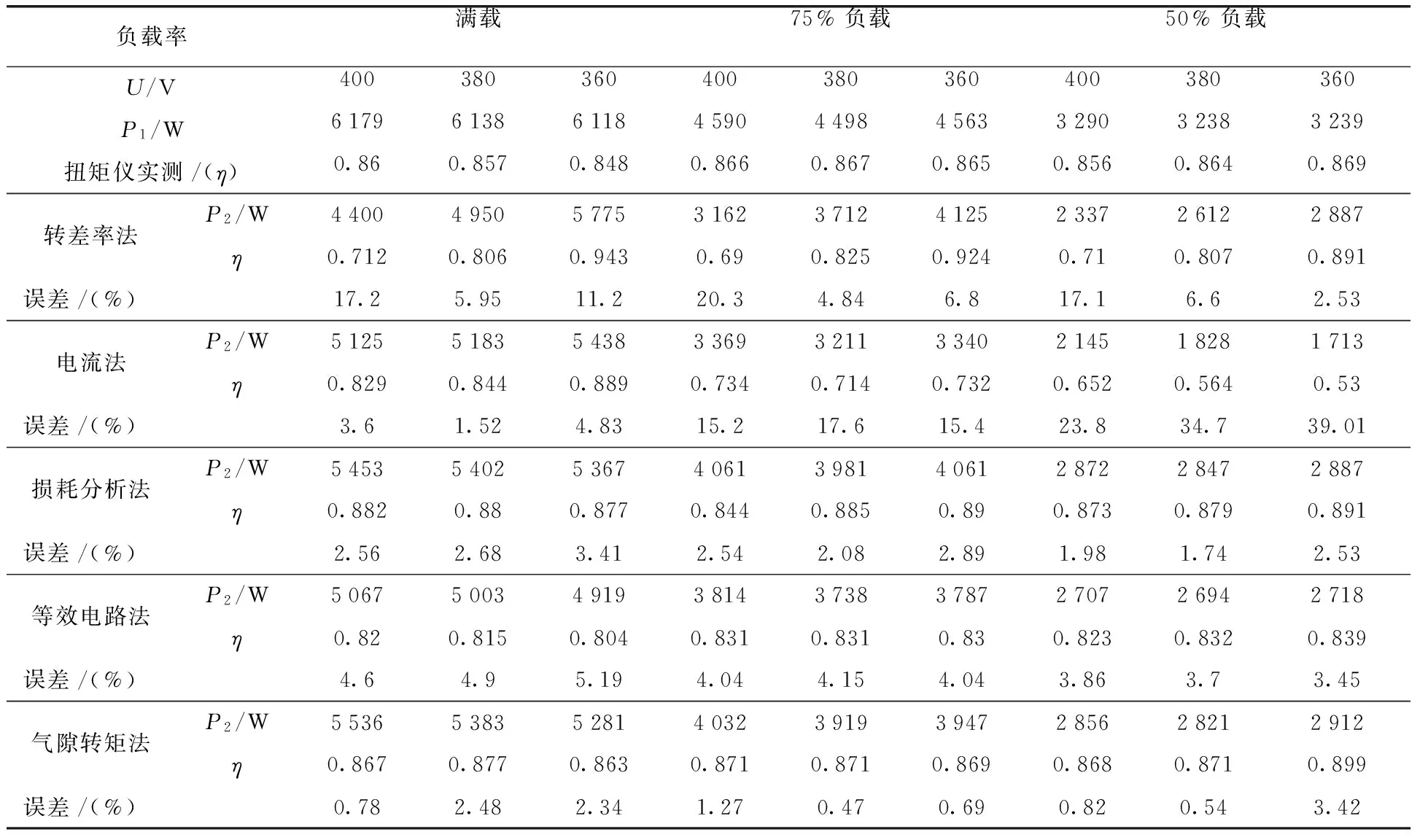
表1 5.5kW異步電機能效辨識方法對比
表1得出轉差率法辨識電機效率隨著電壓變化有很大波動,且誤差最大達到20%;電流法辨識電機效率隨著負載而變化,誤差最大達到13%;傳統等效電路法因為在空載和堵轉運行條件下對電機的T型等效電路做了理想化近似,空載時忽略了轉子回路,堵轉時忽略了勵磁回路,這樣近似導致電機效率誤差最大達到16.7%;改進后等效電路通過電機可測電氣量獲得電機參數避免上述影響,其效率辨識精度有了很大改善,誤差約為2.3%;損耗分析法通過求取各個部分電機損耗,避免了依賴電機參數對效率的影響,其誤差約1.6%;氣隙轉矩法通過氣隙磁場對電機轉矩進行分析,僅僅依靠電機的機端電壓與電流,大大避免了其他因素的影響,其誤差約為1.1%。
根據表1分析,可以得出現場辨識電機效率的精確度由高到低分別為氣隙轉矩法、損耗分析法、改進T型等效電路法、電流法、傳統T型等效電路法、轉差率法、銘牌法。
3 結 語
本文對三相異步電機效率在線辨識方法精度分別進行了研究,并對T型等效電路傳統算法進行改進,使其避免了依靠堵轉試驗求取轉子電阻對電機能效精度的影響,大大提高了電機能效的辨識精度。最終以5.5kW異步電機為例進行試驗研究,對其在不同電壓、不同負載情況下,不同方法辨識電機能效的精度進行了統計,結果表明氣隙轉矩法辨識精度最高,誤差約為1.1%,基本滿足工程的要求。
[1] JOHN S H, JOHN D K , MITCHELL O. Comparison of induction motor field efficiency evaluation methods[J].IEEE Transactions of Indstry Applications, 1998,34(1): 117-125.
[2] AUSTIN H B. An updata on AC induction motor efficiency[J]. IEEE Transactions on Industry Applications, 1994, 30(5): 1362-1372.
[3] CHARLES L B, JOHN W K, EDGAR F M. Determining motor efficiency by field testing[J]. IEEE Transactions on Industry Applications, 1987, 23(3): 440- 443.
[4] JOHN S H, PATRICK L S. Field assessment of induction motor efficiency through aif-gap torque[J]. IEEE Transactions on Energy Conversion, 1996, 11(3): 489- 494.
[5] PAUL G C, BOWERS W D, WALTER L M. Induction motor efficiency test methods[J]. IEEE Transactions on Industry Applications, 1981, 17(3): 253-272.
[6] HSU J S, Woodson H H, WELDON W F. Possible errors in measurement of air-gap torque pulsactions of induction motors[J]. IEEE Transactions on Energy Conversion, 1992, 7(1): 202-208.
[7] KANG S J, SUL S K.Direct torque control of brushless DC motor with nonideal trapezoidal back EMF [J]. IEEE Trans on Power Electronics,1995,10(6): 796-802.
[8] JOHN S H. Field test of motor efficiency and load changes through air-gap torque [J]. IEEE Transac-tions on Energy Conversion, 2003, 10(3): 477- 483.
[9] JOHN S H, JOHN D K, MITCHELL O. Comparison of induction motor field efficiency evaluation methods [J]. IEEE Transactions on Industry Applications, 1998, 34(1): 117-125.
Comparison of Squirrel Cage Asynchronous Motor Energy Efficiency Methods
LIJianjun1,WANGQing2,WANGYushan3
(1. Hebei Xinsida Motor Manufacturing Co., Ltd., Shijiazhuang 052160, China;2. Jiangsu Electric Power Energy Service Corporation Nanjing 210019, China;3. Shanghai Engineering Research Center of Motor System Energy Saving Co.,Ltd., Shanghai 200063, China)
Several online identification methods of three-phase induction motors separately was discussed, and the traditional T-equivalent method was also improved. Taking a 5.5kW asynchronous motor with four poles as an example, the proposed method was verified through experiment, the results showed that the air torque method has the highest accuracy to identify motor efficiency. The achievement could provide a technical support for on-line identification of motor efficiency.
Asynchronous motor; IEEE 112B; accuracy; online identification; efficiency
汪玉山
TM 343
A
1673-6540(2015)05-0069-06
2014-12-19
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
兒童故事畫報(2019年5期)2019-05-26 14:26:14
商周刊(2017年9期)2017-08-22 02:57:49
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32