水聲被動交叉定位算法應用研究*
2015-06-07 10:52:06夏忠婷張振華王益樂
艦船電子工程 2015年11期
夏忠婷 張振華 王益樂
(中國電子科技集團公司第二十八研究所 南京 210000)
水聲被動交叉定位算法應用研究*
夏忠婷 張振華 王益樂
(中國電子科技集團公司第二十八研究所 南京 210000)
文章通過雙基陣被動測距的方位交叉定位法,自動計算水聲源前端測得所有方位目標的交叉點,并對交叉點進行歷史點管理。通過交叉點形成的軌跡的連續性和平滑性判定產生交叉點的原始方位目標是否是同一個目標。在多站多基陣的環境下,驗證了該算法的有效性和可行性,該方法可以成為純方位目標同一性認定的有效手段。最后,對交叉定位法在實際工程應用中遇到的問題進行了總結,并指出了不足之處,以待后期進一步完善。
雙基陣被動測距;方位交叉定位法;交叉點;同一性認定
Class NumberTB566
1 引言
現代戰爭中總是希望探測設備能盡可能多地探測敵方的信息,而不暴露自己的位置信息。一個水下航行的潛艇,為保證自身的隱蔽性,一般情況下不用主動聲吶,只在對敵艦實施魚雷攻擊前才短時間使用,長時間處于工作狀態下的聲吶是被動聲吶。然而一般被動聲吶并不具備測距功能,因而利用被動聲吶進行測距一直是水聲工作者十分關心的課題;20世紀70年代國外才開始研制被動測距聲吶并裝備潛艇。我國20世紀80年代也自行研制成功并已開始裝備部隊。這種聲吶可測定有源目標方位外,還可測定其距離,從而為潛艇的隱蔽活動創造了有利條件。可以認為被動測距聲吶的出現是水聲技術的一大突破,它是在水聲信號處理技術基礎上才得以實現的。反過來為了實現被動聲吶的精確測距,又對信號處理提出了一系列新的要求,從而又推動了水聲信號處理技術的發展[1]。
被動測距是聲納系統的一項主要功能,單個基陣被動測距方法主要有三類彎曲的被動測距方法:1)三子陣定位法和聚焦波束形成方法;2)基于海洋波導聲傳播模型的被動測距方法,最典型的是匹配場算法;3)目標運動分析方法。單基陣被動測距往往對陣元位置測量精度、水文參數、平臺機動等有特定要求,提高單基陣被動測距的精度和寬容性仍是需要努力解決的技術難題,當聲納系統中配有多個間距達數百米以上的聲基陣時,則可融合聲基陣獨立測得的目標方位信息實現被動測距。其中,方位交叉定位基于各基陣獨立測得的方位信息、基陣間距,通過三角函數關系式計算目標距離。和其它方法相比,方位交叉定位對信號形式、信號相關性、海洋水文參數等無特別要求,寬容性好[2~4]。
本文對雙基陣被動測距進行實驗研究。考慮到工程應用的復雜性采用了方位交叉定位法,通過判斷交叉定位點的連續性的平滑程度判定兩個方位目標是否是同一個目標,通過實際的工程應用進一步驗證了該算法的有效性和可行性。
2 算法描述
2.1 雙節點基陣被動測距基本原理
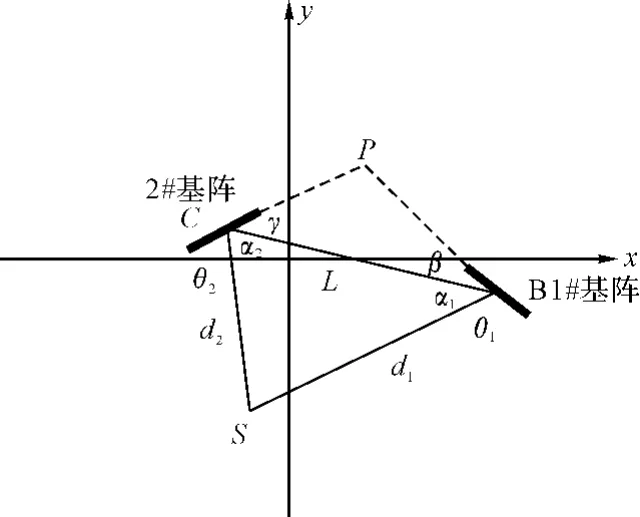
圖1 雙基陣被動測距原理
雙基陣被動測距原理如圖雙基陣被動測距原理如圖1所示。設1#聲基陣、2#聲基陣中心距為L,和陣中心連線的夾角分別為β、γ。設噪聲源S離聲基陣距離滿足單條基陣的遠場條件,則對于單基陣聲波前可近似為平面波,可利用平面波束形成估計目標方位。設兩條聲基陣測得的噪聲源S方位(相對于基陣陣首)分別為θ1、θ2,則利用三角函數關系式,可以解算聲源S離兩條聲基陣的距離[5~10]。
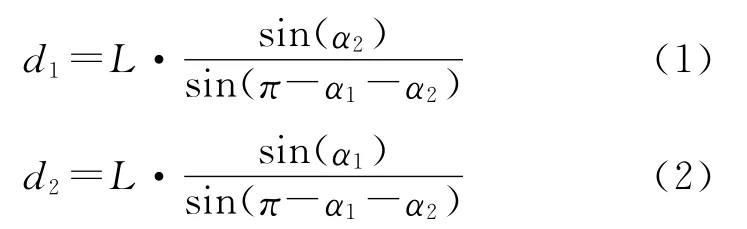
式中

雙基陣被動測距方法對聲源位置有一定限制。當聲源S和基陣距離遠大于L時,α1+α2趨向于π,式(1)、式(2)分母趨向于0,微小的測向誤差將引起很大的測距誤差;當α1+α2=π/2,式(1)、式(2)分母趨向于1,側向誤差的影響最小。
2.2 工程應用算法
如圖2所示,在多站多基陣的環境下,水聲站探測的水聲目標的方位角,對水聲目標做同一性認定時,兩個方位目標的交匯點極有可能是同一個水聲目標,本文通過對多個水聲站多個基陣探測的所有方位目標的交叉點進行自動計算,計算探測的方位目標的所有可能交叉點,并保存一定數量的交叉點的歷史點,根據歷史點的平滑程度判斷兩個方位目標點是否是同一個目標點,同時,根據交叉點的歷史數據可以粗略計算交叉點的速度,通過速度和歷史點的連續程度進一步判斷兩個方位目標是否是同一個目標,下面具體介紹一下該算法過程。
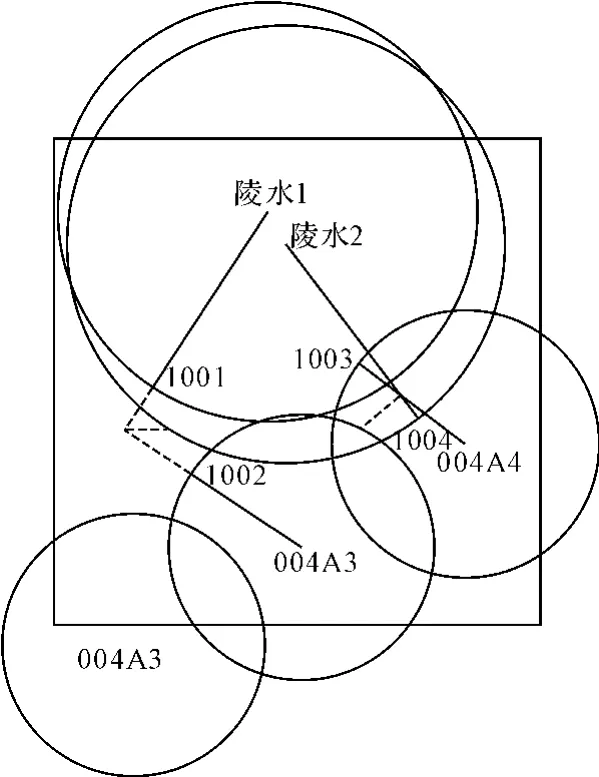
圖2 多基陣多基站場景
第一步:判斷兩個目標是否屬于同一個基陣,同一個基陣發現的目標則不做交叉;
第二步:計算兩基陣之間的距離以及與正北方向的夾角;
第三步:用計算的兩基陣之間的距離作一個基本預判,對無法形成有效交叉區域的基陣進行過濾。本文預判的規則是L>Amax+Bmax,式中L為兩基陣之間的距離,Amax為探測目標1所在基陣的最大探測范圍,Bmax為探測目標2所在基陣的最大探測范圍;
第四步:利用經度值確定基站B和基站C的相對位置,確定基準位置,B/C基站靠近西邊的為基準位置;
第五步:修正因雙基站與正北方向方位差產生的模型坐標系方位差,即做一個坐標變換;
第六步:利用雙基陣各自目標方位,過濾一些不能產生交叉點的情況;比如圖1中的0≤α1<90,α1≤α2<270;
第七步:根據式(1)~式(3)計算交叉點S與基陣B、C之間的距離d1、d2,比較d1、d2與基陣最大探測范圍,若超出基陣最大探測范圍則剔除該交叉點;
第八步:已知兩基陣的經緯度,利用第七步求得的交叉點與基陣距離、方位計算出兩方位目標交叉點的經緯度;
第九步:對計算出的交叉點進行歷史點的記錄,根據兩交叉點的距離和時間差估算出交叉點的速度。
3 工程應用結果
在實際的工程環境下,將2.2節中的算法應用到實際的工程設計中,如圖3所示,本工程包含A、B、C三個水聲站,A站包含兩個基陣,B站包含四個基陣,C站包含八個基陣,各基站基陣的中心經緯度已知,態勢圖上包含水聲目標、融合目標、雷情目標各類目標的集合,通過對海圖區域進行局部框選,過濾其他類型目標,單獨對水聲目標進行分析和判定,得到圖4水聲方位目標區域圖。
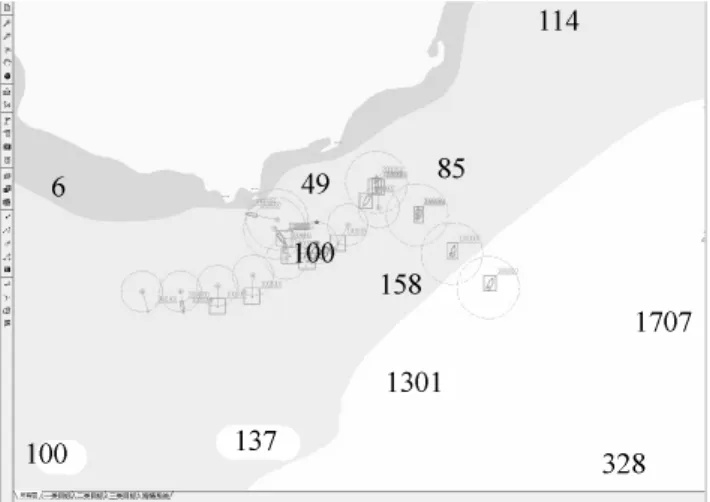
圖3 各類目標態勢圖
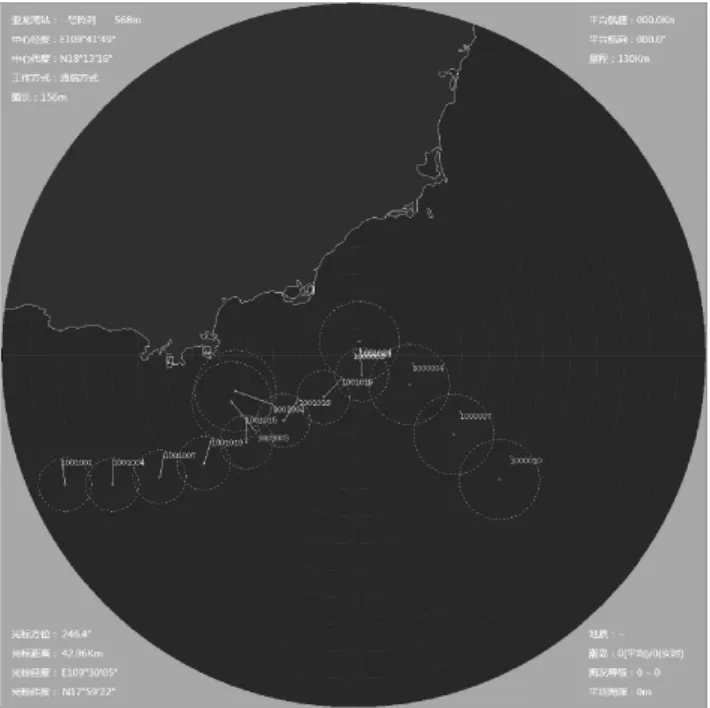
圖4 水聲方位目標區域圖
如圖5~圖7所示,在多站多基陣的情況下,對水聲源前端測得方位目標進行同一性認定時,通過對所有方位目標自行交叉點的自動計算,在顯示界面上顯示所有可能的交叉點的航跡圖,如果交叉點的航跡圖連續、平緩且速度平緩一致,則值班員標志重點目標(對交叉點的兩個方位目標進行延長),顯示兩個來源目標的屬性,人工對比兩個方位目標的屬性,如果兩個方位目標的屬性極為相似,則對水聲源前端發出同一性人性請求,判定這兩個方位目標是否是同一個目標,通過工程實踐表明,此算法能夠有效的輔助無源方位目標的同一性判定。
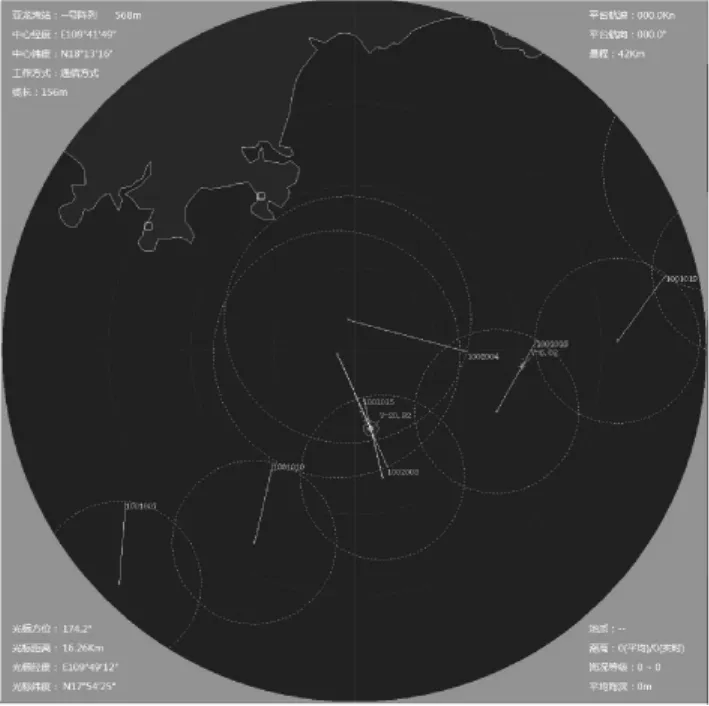
圖5 不同基站在交叉區域內的交叉點圖
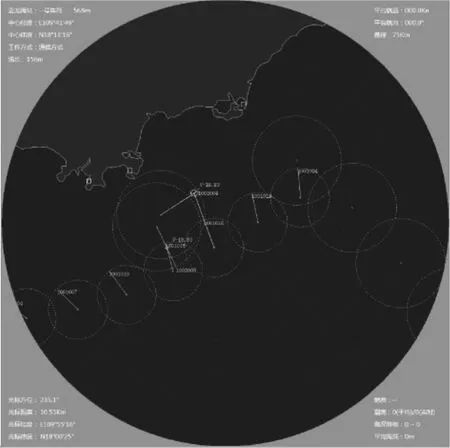
圖6 不同基站在交叉區域外的交叉點圖
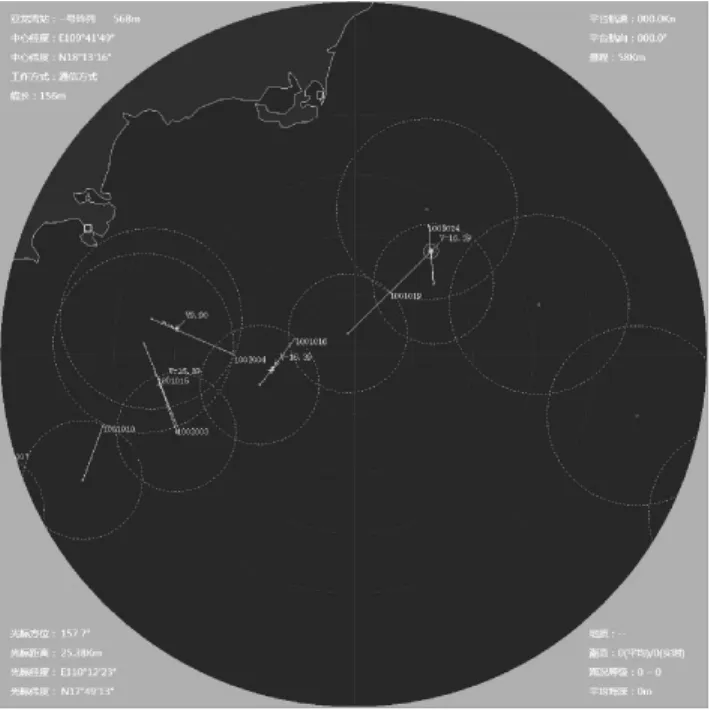
圖7 同一基站不同基陣交叉點圖
4 結語
本文結合被動測距交叉定位算法,給出了在多站多基陣的環境下,水聲站前端探測的只有方位的目標,在一定的準則下,自動計算出所有可能的交叉點,通過交叉點的連續性和平滑度判斷兩個原始方位目標是否是同一個目標,實際的工程應用表明,該方法能很好地判定同一性。
同時,也總結了幾點有待改進及不足之處:
1)在遠場平面波假設條件下利用各子陣測目標方位角,亦即要求子陣的尺寸小于d1、d2,此外L應比較大,否則α、β的差別太小,誤差加大。
2)利用最新交叉點減去次最新交叉點結算交叉點的速度,隨機較大誤差,只能作為參考。
[1]田坦,劉國枝,孫大軍.聲吶技術[M].哈爾濱:哈爾濱工程大學出版社,2000,3:138-139.
[2]劉流,孟彧仟,張自麗,等.雙基陣節點被動測距方法實驗研究[J].艦船電子工程,2015,4(42):63-64.
[3]毛衛寧.水下被動定位方法回顧與展望[J].東南大學學報(自然科學版),2001,31(6):129-132.
[4]宋新見,惠俊英,殷冬梅,等.水下噪聲目標被動測距技術研究[J].應用聲學,2005,24(3):133-139.
[5]時潔,楊德森,劉伯勝,等.基于MVDR聚焦波束形成的輻射噪聲源近場定位方法[J].大連海事大學學報,2008,34(3):55-58.
[6]周偉,門麗杰,梅繼丹.淺海三元陣近程被動定位實驗研究[J].哈爾濱工程大學學報,2009,5(30):547-551.
[7]關欣,何友,衣曉.雙基陣純方位水下被動目標跟蹤性能仿真分析[J].系統仿真學報,2003,15(10):1464-1466.
[8]張小鳳,趙俊渭,王榮慶,等.雙基地聲納定位精度和算法研究[J].系統仿真學報,2003,15(10):1471-1473.
[9]孫勇,趙俊渭,張小鳳.雙基地聲吶定位算法的研究與比較[J].系統仿真學報,2006,23(9):129-130.
[10]Mozzone L,Bogi S,Primo F.Deployable Underwater Surveillance System-analysis of experimental results,SR-278[R].La Spezia Italy,NATO SACLANT Undersea Research Centre,1997,3:181-182.
Applicaion of Passive Sonar BearingCross Location Algorithm
XIA Zhongting ZHANG Zhenhua WANG Yile
(The 28th Research Institute,CETC,Nanjing 210000)
By Bi-static array passive ranging bearing cross location method,the paper automatically calculates all bearing target cross location point measured by the front sound source,and manages the historical cross location point.The continuity and smoothness of the track formed by cross location point are used to determine the bearing target form the same source.Under a multi-station multi-array environment,the effectiveness and feasibility of this algorithm are demonstrated,which can become effective means of identification of same target.Finally,this paper summarizes development problems in the process of practical application and points out the shortcomings.
bi-static array passive ranging,bearing cross location,cross location point,identification of same target
TB566DOI:10.3969/j.issn.1672-9730.2015.11.014
2015年5月10日,
2015年6月29日
夏忠婷,女,工程師,研究方向:水聲系統工程與算法研究等。張振華,男,工程師,研究方向:水聲系統工程與算法研究等。王益樂,男,助理工程師,研究方向:水聲陣列信號處理等。