電驅動橋大客車電子差速系統模糊PID控制
2015-06-07 11:22:58倪赟磊
重慶交通大學學報(自然科學版) 2015年4期
何 仁,倪赟磊
(江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013)
?
電驅動橋大客車電子差速系統模糊PID控制
何 仁,倪赟磊
(江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013)
研究了輪轂式電驅動橋大客車的差速控制策略,推導了恒轉矩下驅動電機的驅動電流和對應驅動輪縱向速度的計算方法,提出了基于滑轉率的模糊PID控制方法對電驅動橋大客車左右車輪單獨轉速協調控制,設計了模糊PID控制器,推導了差速時左右側驅動輪滑轉率計算方法,建立了控制系統的MATLAB/Simulink系統模型。仿真分析差速時車輛內外側車輪滑轉率變化曲線,該控制系統相應時間快,內外側車輪滑轉率均趨于理想值,與理論分析一致。
車輛工程;電驅動橋;差速;模糊控制;PID控制
0 引 言
隨著汽車工業的迅速發展,汽車輪邊驅動技術逐步開始完善,電驅動橋技術目前就是研究熱點之一。電驅動橋上集成了兩臺電機,每臺電機獨立驅動車輪,同時電驅動橋舍棄了差速器等一系列機械傳動部件,通過電子差速控制系統實現車輛的差速行駛[1]。
電子差速控制需要選用合理的差速控制方法,達到車輛能夠在轉向工況下穩定行駛。目前,國內對這方面的相關研究比較少,靳立強等[2]提出通過對驅動轉矩控制模式以實現自適應差速;彭思侖[3]采用BP神經網絡理論,通過模擬實際工況下獲得不同車速和方向盤轉角下的最佳轉矩調節量,通過大量的仿真數據進行神經網絡訓練,實現不同情況下轉矩調節量的預測,來擬合非線性控制系統函數;趙艷娥等[4]采用滑模變結構控制理論,選用常值滑模控制每個車輪的滑轉率。
由于差速工況下車輛驅動系統時變性和非線性,基于數學模型的控制器很難實時適應這種變化,經典和現代控制理論設計的差速控制系統比較復雜。模糊控制無需被控對象的數學模型,具有不確定性和復雜性的優點,滿足差速控制時變性的要求,但是模糊控制對誤差相對較小的控制效果不如PID控制。筆者設計基于滑轉率的模糊控制和PID控制相結合的控制算法,誤差較大用模糊控制,誤差較小用PID控制微調,分別對電驅動橋內外側車輪控制,實現電驅動橋大客車的差速行駛。
1 電驅動橋大客車差速系統模型
電驅動橋大客車差速是指在輪胎在地面縱向線速度和輪心速度不協調,即車輪的滾動距離和實際車輪在地面行駛的路徑長度不等,這將引起車輪的拖滑或者滑轉,導致汽車不能正常行駛,輪胎拖滑會加大輪胎磨損[5]。
圖1是電驅動橋大客車轉向時的Aekermann模型,后橋為電驅動橋。該模型在車輪處于極限范圍內、車身位剛體的條件下成立。為了避免車輛轉向時產生拖滑或者滑轉現象,必須保證車輛轉向時電驅動橋的內外側車輪作純滾動運動[6]。
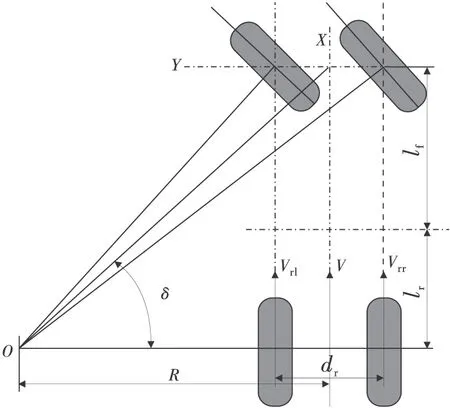
圖1 Aekermann模型
從圖1中可得:
(1)
(2)
式中:L為整車軸距;δ為車輛轉向角;ω為繞O點轉動的角速度;Ri為繞O點的轉動半徑;vi為縱向線速度。
把式(1)帶入式(2),可以化簡得到電驅動橋轉向時左右車輪的縱向線速度與整車縱向速度的關系,分別為:
(3)
(4)
式中:v為整車縱向線速度;dr為車輛后橋輪距。
一般情況下,以車輛轉向時驅動輪的滑轉率來評判所設計的差速控制的好壞,其中滑轉率s計算如式(5):
(5)
式中:ωi為驅動輪的角速度;ri為驅動輪的滾動半徑;vi為驅動輪的輪心縱向線速度。
一般驅動輪理想的滑轉率在0.05~0.15[7]。由于電驅動橋的內外側車輪轉速可調,即采取合理的調整方式,就可以保證驅動輪滑轉率在理想的范圍內。
2 電驅動橋控制策略
2.1 電機控制策略
電機的驅動性能參數功率、轉速和轉矩是由整車行駛條件決定的。某一輛滿載的電驅動橋大客車在恒定車速下行駛時,假設車速恒定且路面坡度為0,單邊電機所需的驅動功率可以由式(6)求得[8]:
(6)
式中:η為電機的效率;f為滾動阻力系數;A為有效迎風面積;CD為空氣阻力系數;m為整車滿載質量;N為驅動電機的臺數。
電機的轉速可以根據整車車速換算得到如式(7):
(7)
式中:v為整車車速;i為減速比;r為車輪滾動半徑。
電機是通過其對應的電機控制器獨立控制,電機兩端的電壓一般是高壓配電柜直接連出,電壓數值在一段時間內是接近電機額定電壓的恒定值。電機控制器根據實時功率所需,控制電機的驅動電流大小,以達到控制電機功率的目的,一般單邊電機的電流如式(8):
(8)
(9)
保持油門踏板不變,即需求扭矩保持一個恒定值。把式(7)代入式(8)得到式(9),即單邊電機的轉速n可以通過控制該電機驅動電流I來控制,即驅動電流可以控制式(5)中的角速度ωi。
2.2 差速控制策略
車輛做轉向行駛時,內外車輪的實際行駛路徑長度不等,若存在部分車輪的車速過快或者過慢,將導致車輛轉向行駛困難,輪胎與地面接觸表面會相對地面做滑轉或者拖動,加速輪胎的磨損,減短輪胎壽命[9]。
轉速控制策略是在車輛轉向時保持內外車輪的驅動轉矩相同,即平分整車需求扭矩,通過控制改變內外側車輪對應驅動電機的轉速,使內外車車輪以不同的速度行駛,實現電子差速。電驅動橋大客車差速過程如下:保持油門踏板不變,轉動方向盤;通過CAN線把車輪的轉向角δ以及當前車速v數據傳遞給整車控制器,整車控制器計算內外驅動車輪的縱向線速度,根據筆者設計的模糊PID差速控制系統計算出內外側車輪對應驅動電機的驅動電流變化量;電機控制器根據此驅動電流變化量控制對應的電機轉速,實現整車的差速行駛。
3 差速系統模糊PID器設計
筆者設計一種調整差速系統控制量的模糊PID控制器,這種控制器能夠在大偏差范圍內利用模糊控制推理的方法,調整系統的控制量單邊電機的電流變化控制量U,而在小范圍偏差范圍內轉成PID控制,避免由于誤差變化率過大導致PID超調[10]。
3.1 模糊控制器設計

3.1.1 隸度函數
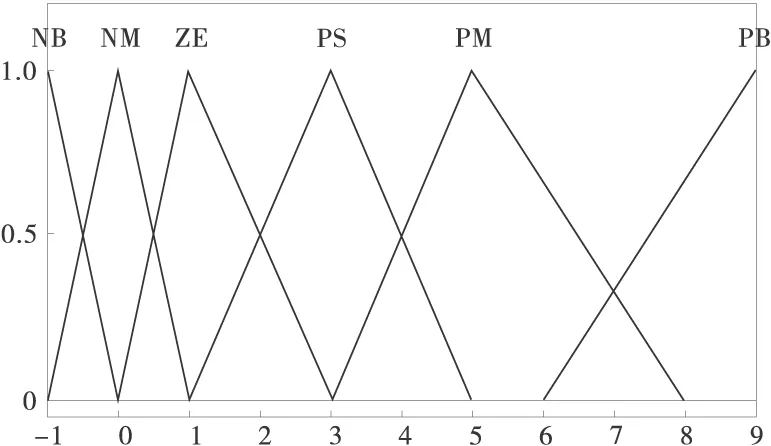
圖2 滑轉率誤差e的隸度函數

圖3 滑轉率誤差變化率ec的隸度函數
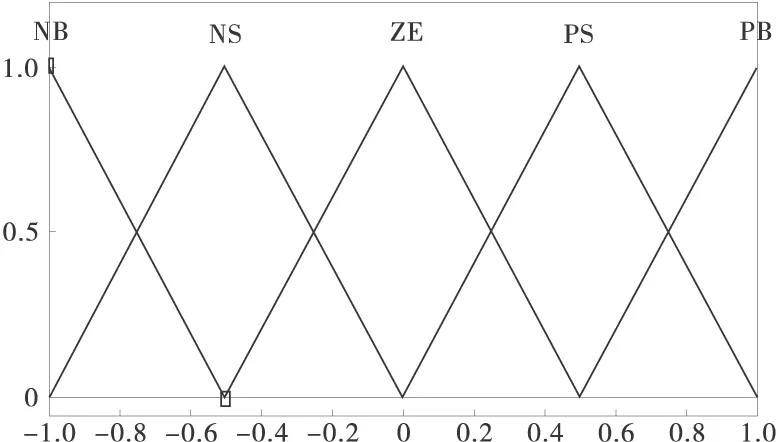
圖4 輸出電流變化量U的隸度函數
3.1.2 模糊規則
模糊規則是將滿足模糊化的多個變化條件的前提下推理出一個決策結果的推理法則,一般這個決策結果經過反模糊化即為真實輸出值。這個推理規則一般是通過經驗或者仿真調整得出,本次設計的電流變化控制量ΔI的模糊控制規則見表1。
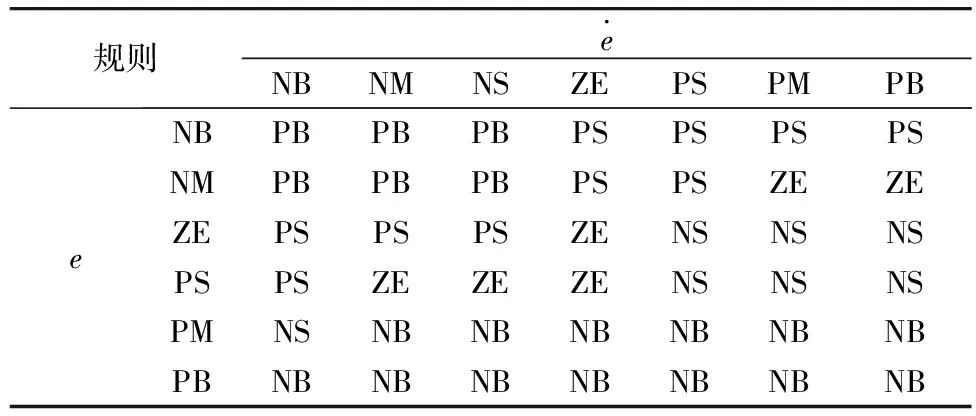
表1 模糊控制規則
3.2 PID控制器設計
PID控制器是具有比例、積分和微分控制規律的控制器。設計的PID控制器以實際滑轉率和理想滑轉率的差值作為輸入量,輸出變量為電機驅動電流調節量。根據PID控制器輸出電機驅動電流調節量,改變驅動電機的轉速,實現左右車輪的差速協調行駛,滑轉率保持在理想滑轉率附近[12]。PID算法的離散形式如下:
(10)
式中:kp,ki,kD分別為比例系數、積分系數、微分系數;u(t)為t時刻電機的驅動電流大小;e(t)為t時刻電驅動橋驅動輪滑轉率誤差。
3.3 模糊PID切換設計
本次設計的模糊PID控制器在小誤差范圍內采用PID控制,滑轉率誤差超過設定指標采用模糊控制,中間的切換指標設計如式(11):
(11)
式中:e0為設定切換模糊控制和PID控制的門限值。
4 差速系統模型建立和仿真分析
4.1 電驅動橋大客車差速系統仿真模型建立
電驅動橋大客車轉向時,內外側車輪的滾動距離不同。筆者對內外側車輪分別采用模糊PID控制,達到內外側車輪的滑轉率數值在理想滑轉率附近,提高車輛的行駛性能。建立了差速控制的MATLAB/Simulink模型,利用FuzzyLogicToolbox將上文設計的基于滑轉率的模糊PID控制器轉換為仿真模型,其框圖模型如圖5。內外側車輪受單獨的電機控制器和獨立的模糊PID控制器控制。整車模型根據車輛的車速和整車質量,輸出電機所需的驅動電流,當有轉向角信號輸入時,內外側各自對應的模糊PID控制器起效,經過控制規則輸出內外側電機驅動電流的變化量,改變內外側電機的轉速,使得內外側車輪滑轉率在理想值附近,實現差速控制。
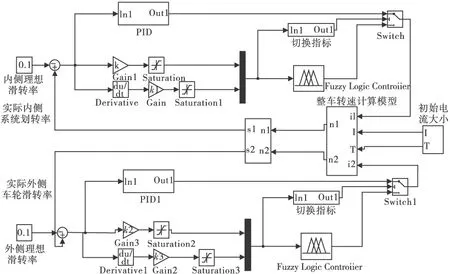
圖5 差速仿真系統模型
4.2 仿真分析
本次仿真車輛模型的主要參數見表2,該控制系統通過調節內外側電機的驅動電流來調整驅動輪的滑轉率,使滑轉率收斂于理想數值。

表2 車輛模型主要參數
工況模擬:在平直無坡路面上,電驅動橋大客車以車速v=20 km/h勻速行駛,在某一時刻(記t=0 s)時,前轉向輪接受到一個δ=π/5的轉向信號,電驅動橋需要差速行駛,車輛保持車速v=20 km/h。仿真系統調整內外側車輪驅動電流大小,假定本次選擇的內外側理想滑轉率均為sd=0.1,仿真結果如圖6、圖7。
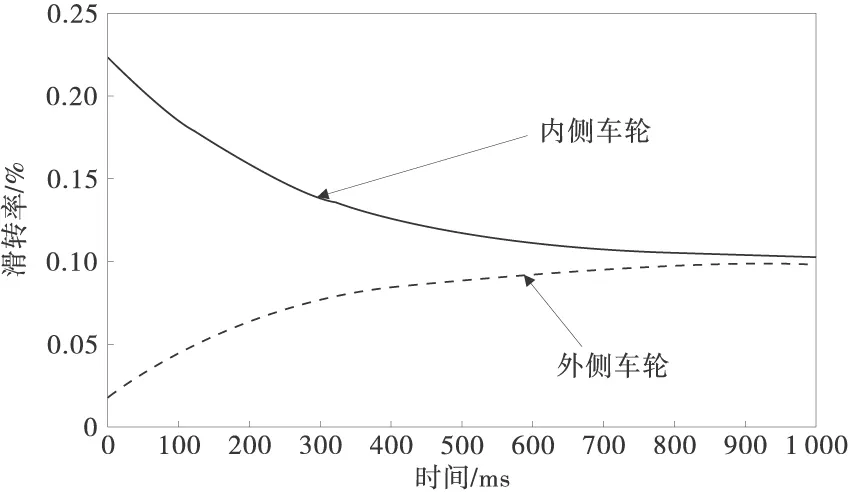
圖6 內外側驅動輪滑轉率仿真曲線
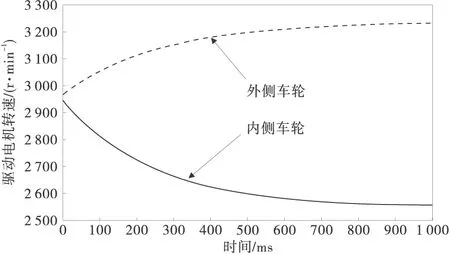
圖7 內外側驅動輪對應驅動電機的轉速變化仿真曲線
從圖6仿真曲線可知,在轉向角剛響應時,驅動輪滑轉率有一定得振蕩,利用模糊控制將滑轉率控制到較小的超調量范圍;隨后通過PID控制,內外側車輪的滑轉率在趨于收斂到理想數值sd=0.1附近。
本文的控制模型設定的初始左右車輪的滑轉率為sd=0.1。從理論分析,車輛轉向時電驅動橋內側車輪一定處于滑轉狀態;而外側車輪可能處于滑轉率小于理想值的狀態下行駛,也可能出現滑轉率<0即車輪處于拖滑狀態,外側車輪的具體狀態主要取決于整車參數和車輛車速、轉向角的大小。從圖6中可以看出,內側車輪的滑轉率從一個較高數值下降到趨于理想滑轉率狀態;外側車輪開始處在滑轉率小于理想值的狀態,在系統控制下趨于理想值。
從理論分析,轉向時外側車輪相比內側車輪走過更長的路程,即正常行駛時外側車輪需要更高的轉速。內側車輪必須降低電機轉速,使滑轉率減小,避免車輪打滑現象發生;外側車輪提高電機轉速,使車輪的滑轉率盡快達到理想值,避免車輪拖滑現象發生。圖7仿真的內外側車輪各自對應驅動電機的電機轉速圖曲線變化與理論分析一致。
5 結 語
利用電驅動橋的兩臺電機可以獨立控制轉速的特點,在車輛差速時對內外側電機分別設計一個基于滑轉率的模糊PID控制器,實現差速時內外側獨立的模糊PID控制,互不影響。仿真結果表明,內側車輪需通過降低電機轉速來降低車輪的滑轉率數值,外側車輪需提高電機轉速來提高滑轉率的數值。這與差速時內側車輪有較高的滑轉率、外側車輪需要較高轉速的理論分析結果一致。充分發揮模糊控制和PID控制的特點,較好的控制了內外側車輪的滑轉率,系統反應迅速。
[1] Tahami F,Kazemi R,Farhanghi S,et al.Fuzzy based stability enhancement system for a four-motor-wheel electric vehicle [J].SAE Technical Paper,2002(1):1588.
[2] 靳立強,王慶年.電動輪驅動汽車電子差速控制策略及仿真[J].吉林大學學報,2008,38(1):1-6. Jin Liqiang,Wang Qingnian.The Simulation of electronic differential control strategy on electric wheel drive vehicle [J].Journal of Jilin University,2008,38(1):1-6.
[3] 彭思侖.電動汽車差速控制策略研究[D].武漢:武漢科技大學,2011. Peng Silun.Electric Vehicle Differential Control Strategy [D].Wuhan:Wuhan University of Science and Technology,2011.
[4] 趙艷娥,張建武.輪轂電機驅動電動汽車電子差速系統研究[J].系統仿真學報,2008,20(18):4767-4772. Zhao Yan’e,Zhang Jianwu.Study on electronic differential control system of independent in-wheel motor drive electric vehicle [J].Journal of System Simulation,2008,20(18):4767-4772.
[5] 趙碩.電動輪驅動汽車差速技術研究[D].長春:吉林大學,2006. Zhao Shuo.Electric Wheel Drive Vehicle Differential Research [D].Changchun:Jilin University,2006.
[6] 靳立強,王慶年,張緩緩.電動輪驅動汽車差速性能試驗研究[J].中國機械工程,2007,18 (21):2632-2636. Jin Liqiang,Wang Qingnian,Zhang Huanhuan.Test research on differential performance of electric wheel drive [J].China Mechanical Engineering,2007,18 (21):2632-2636.
[7] 郭孔輝,王德平.汽車驅動防滑控制理論的初步研究[J].吉林工業大學學報,1997(3):1-4. Guo Konghui,Wang Deping.The preliminary study of the automotive drive-slip control theory [J].Journal of Jilin University of Technology,1997(3):1-4.
[8] 余志生.汽車理論[M].5版.北京:機械工業出版社,2009. Yu Zhisheng.Car Theory [M].5thEd.Beijing:Mechanical Industry Press,2009.
[9] 劉峰.輪轂驅動電動汽車整體設計與研究[D].武漢:武漢理工大學,2011. Liu Feng.In-Wheel Motor Drive Electric Vehicle Design and Research [D].Wuhan:Wuhan University of Technology,2011.
[10] 張國良,曾靜.模糊控制及其MATLAB應用[M].西安:西安交通大學出版社,2002. Zhang Guoliang,Zeng Jing.MATLAB Fuzzy Control and Its Application [M].Xi’an:Xi’an Jiaotong University Press,2002.
[11] 趙國柱,滕建輝,魏民祥,等.基于模糊控制的電動汽車低速再生ABS研究[J].中國機械工程,2002,2(1):117-121. Zhao Guozhu,Teng Jianhui,Wei Mingxiang,et al.Study on low-speed regenerative braking of electric vehicle as ABS based on fuzzy control [J].China Mechanical Engineering,2002,2(1):117-121.
[12] 劉志新,張大為.基于滑轉率的四輪驅動汽車防滑模糊控制仿真[J].農業機械學報,2005,12(36):21-24. Liu Zhixin,Zhang Dawei.The simulation of anti-skid fuzzy control method based on the slip rate of four-wheel-drive vehicle [J].Transactions of the Chinese Society of Agricultural Machinery 2005,12(36):21-24.
Fuzzy PID Control of Electronic Differential System in Electric Drive Axle Buses
He Ren,Ni Yunlei
(School of Automobile & Traffic Engineering, Jiangsu University, Zhenjiang, Jiangsu 212013, China)
Differential control strategies of in-wheel motor bus were researched. Calculation method about drive motor current with the corresponding wheel speed was deduced, when the motor was in constant torque. Speed coordination of the left and right wheels individually control method was proposed, which was fuzzy PID control based on slip rate. Fuzzy PID controller was designed, and the slip rate calculation method of the left and right drive wheel was deduced during differential condition; finally, the Matlab/Simulink control model system was built. Slip rate changing curve of the inner and outer drive wheel was simulated in differential condition. The proposed control system responses rapidly. Both the inner and outer drive wheel slip rate tends to be an ideal value. The simulation results are consistent with the theoretical ones.
vehicle engineering; electric drive axle; differential; fuzzy control; PID control
10.3969/j.issn.1674-0696.2015.04.31
2013-05-04;
2013-07-28
江蘇省科技成果轉化項目(BA2010050)
何 仁(1962—),男,江蘇南京人,教授,博士生導師,主要從事汽車機電一體化技術方面的研究。E-mail:heren@vjs.edu.cn。
倪赟磊(1988—),男,江蘇無錫人,碩士研究生,主要從事汽車機電一體化技術方面的研究。E-mail:niyunlei1988@163.com 。
U463.42
A
1674-0696(2015)04-156-05
