基于空間變形梁的柔性機械臂剛-柔耦合動力學模型研究
2015-06-07 11:22:58羅天洪黃世福董紹江
重慶交通大學學報(自然科學版) 2015年4期
羅天洪,黃世福,陳 才,劉 淼,董紹江
(重慶交通大學 機電與車輛工程學院,重慶400074)
?
基于空間變形梁的柔性機械臂剛-柔耦合動力學模型研究
羅天洪,黃世福,陳 才,劉 淼,董紹江
(重慶交通大學 機電與車輛工程學院,重慶400074)
針對作大范圍空間運動的機械臂,提出了基于變形旋量理論的工業機器人機械臂剛柔耦合動力學建模方法;研究了機械臂空間變形耦合和扭轉變形對動力學特性的影響;建立了作大范圍空間運動柔性機械臂的剛-柔耦合動力學理論模型,該模型將機械臂應用到空間范圍,并考慮扭轉變形的影響。對模型做計算仿真分析,將分析結果與傳統零次模型進行比較。結果表明:作大范圍運動機械臂動力學方程的建立,旋量理論的應用解決了傳統數學方法只限于平面運動的局限性;大范圍運動與機械臂變形之間的耦合,對于機械臂桿件和終端有一定的影響;計及變形耦合影響的機械臂動力學特性將發生變化,機械臂振動頻率會提高。
機電工程;旋量理論;柔性機械臂;剛柔耦合;動力學模型
0 引 言
近年來,隨著世界工業技術的發展,工業機器人向著輕質、重載、高精密方向快速發展,柔性機械臂也得到廣泛的應用。柔性機械臂的動力學模型屬于剛-柔耦合動力學模型,傳統的零次建模理論[1-3]是將柔性臂簡化為Euler-Bernoulli梁的方式進行建模,沒有考慮作大范圍運動與機械臂柔性變形之間的耦合作用,因此動力剛化現象的基礎上,圍繞作大范圍運動機械臂的剛-柔耦合動力學模型,許多學者又進行了研究。韓清鵬等[4]建立了剛-柔混合兩桿機械臂的動力學方程,分別討論了在大范圍運動已知條件和未知條件下的機械臂動力學響應;劉錦陽等[5-6]考慮縱向變形與軸向伸長量關系式中的二次耦合項,研究了柔性梁的剛-柔耦合問題,并對快速展開的空間機械臂進行了動力學建模;J.Martins等[7]對單一柔性關節的機械臂建立了數學模型,通過考慮離心力剛化問題減少了非線性動力的影響。孔向東等[8]從彈性變形的幾何非線性關系出發,考慮了柔體系統中機械臂在剛彈耦合作用下橫向彎曲變形產生的附加拉壓應變引起的幾何非線性問題;鄧峰巖等[9]在柔性梁的縱向、橫向變形中均考慮了橫向彎曲變形的二次耦合項,對一雙連桿柔性機械臂建立了耦合動力學方程。這些方法為一次耦合動力學建模方法以及考慮了變形耦合對縱向和橫向同時影響,但均是將機械臂簡化為平面柔性梁的模型進行建模分析,而將柔性機械臂置于空間范圍的耦合模型鮮有研究。
筆者將變形旋量理論運用于機械臂剛柔耦合動力學的分析中,將機械臂簡化為空間柔性梁,考慮其作大范圍的空間運動,采用一致質量有限元法對梁進行離散,在此基礎上,考慮機械臂大范圍運動與變形的相互耦合作用,建立耦合動力學方程,并進行數值仿真,分析了與傳統方法的差異。該分析方法可拓展到多連桿的機械臂,更好的揭示了作大范圍空間運動柔性機械臂的動力學特性。
1 作大范圍空間運動柔性梁的變形及運動學分析
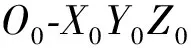
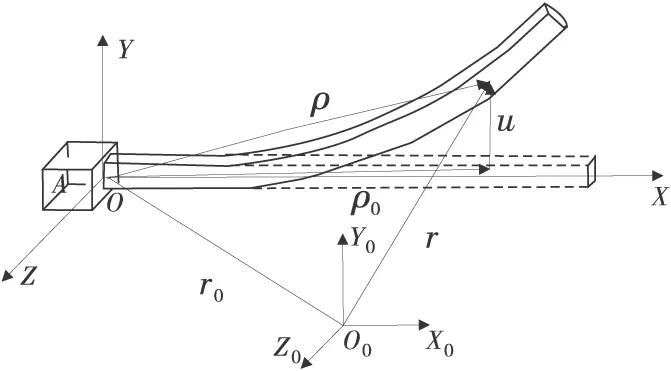
圖1 作大范圍空間運動的柔性梁
根據變形旋量理論[10],柔性梁在任意點k處的變形旋量可以表示為:
(1)

(2)
(3)
(4)
式中:υx,υy,υz為與k對應的梁中心軸上任意一點在局部坐標系x,y,z方向的變形位移。
利用一致質量有限元法對柔性梁進行離散,設N1,N2,N3為形函數陣,q為獨立的總體變形位移陣,得:
υx=N1q,υy=N2q,υz=N3q
(5)
將式(5)代入式(2)~式(4),可得到:
(6)
式中:
(7)
(8)

設A為局部坐標系相對于慣性坐標系的旋轉矩陣,由圖1可得:
(9)

式(9)對時間t求導,得任意一點k在慣性坐標系下的速度為:
(10)
式中:θ為局部坐標系相對慣性坐標系的轉角。
對于作大范圍空間運動的柔性梁,在考慮彎曲變形的同時,還需要考慮扭轉變形對空間梁的影響,即可用式(1)中的φ來表示,扭轉變形可利用Rayleigh-Ritz近似函數的形式表達[9]:
(11)
2 作大范圍空間運動柔性機械臂剛-柔耦合動力學分析
2.1 系統模型的描述
作大范圍空間運動柔性機械臂的模型如圖2,機械臂由C1,C2,C3三部分組成,桿件C1的局部坐標系與慣性坐標系重合,三連桿的長度分別為L1,L2,L3,機械臂在空間范圍內運動過程中,3根柔性臂產生柔性變形,與3個剛性關節產生剛柔耦合的作用,三連桿所擺動的角度分別為θ1,θ2,θ3,質量為M1,M2,M3,連接柔性臂的3個關節的驅動力矩分別為τ1,τ2,τ3。
圖2 作大范圍空間運動柔性機械臂模型
2.2 機械臂剛柔耦合動力學方程的建立
根據式(9)和式(10),機械臂第i桿上任一點的矢量以及速度在慣性坐標系中可以有式(12)、式(13)表示:
(12)
(13)
因此該柔性機械臂的動能可以表示為:
(14)
式中:Mi是無限小的梁單元的質量矩陣。
根據圖2機械臂系統模型,分別分析桿件C1,C2,C3所產生的動能,由于C1桿的局部坐標系與慣性坐標系重合,因此r01=0,旋轉矩陣A1為:
(15)

(16)

(17)
根據式(1)和式(11),柔性機械臂的勢能可以表示為:
(18)
因此,Lagrange函數為:
(19)
根據Lagrange方程
(20)
將式(19)代入式(20)中,可得到該柔性機械臂剛-柔耦合動力學方程

(21)
式中:M是系統慣性矩陣;B是系統廣義速度耦合項;K是系統廣義剛度矩陣;Q是廣義力矩陣。
式中:τi是關節驅動力矩;Wi為廣義外力。
3 仿真分析
取柔性機械臂的各參數為:機械臂臂長L1=L2=L3=3m,密度ρ=2.7×103kg/m3,彈性模量E=6.895×1010Pa,截面面積為S=8×10-4m2,慣量矩陣Iyy=3.2×10-7m4,Izz=3.2×10-7m4,3個關節驅動力矩為:
τ1=215sin3(2πt)+62
τ2=125sin3(2πt)+40
τ3=75sin3(2πt)+15
柔性機械臂初始狀態為圖2所示的位置,分別用此耦合動力學模型和傳統的零次模型,采用懸臂梁形式的邊界條件,根據前兩節所得理論結果及模型,編制VB語言程序,進行數值仿真,比較了其剛性轉角,C1,C2機械臂一階振動模態隨時間的變化,以及終端機械臂的y,z方向的變形位移,如圖3~圖5,其中虛線表示傳統的零次模型,實線表示該耦合動力學模型。
由圖3可見,本文的模型對機械臂兩根連桿有一定的影響,而對于末端桿件影響更大,因此該模型說明多連桿機械臂的動力分析有必要考慮大范圍運動和桿件變形之間的耦合作用。
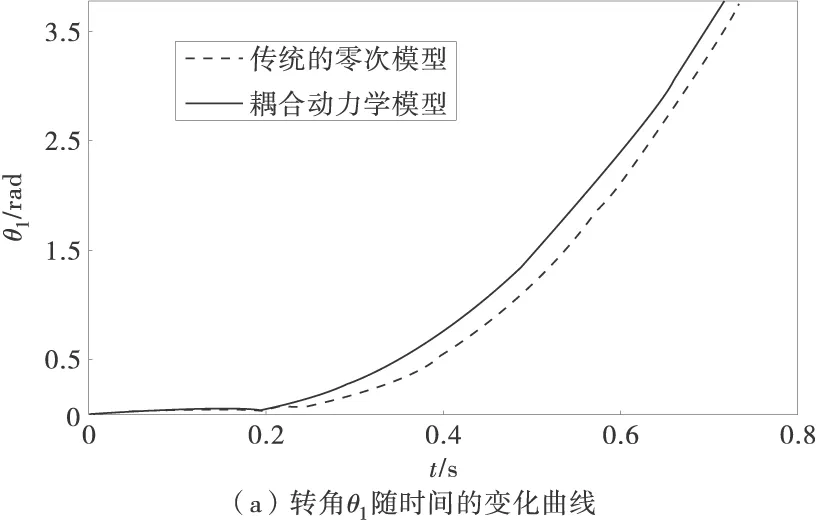

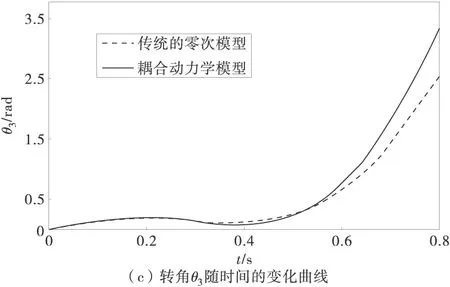
圖3 轉角θ1,θ2,θ3隨時間的變化曲線
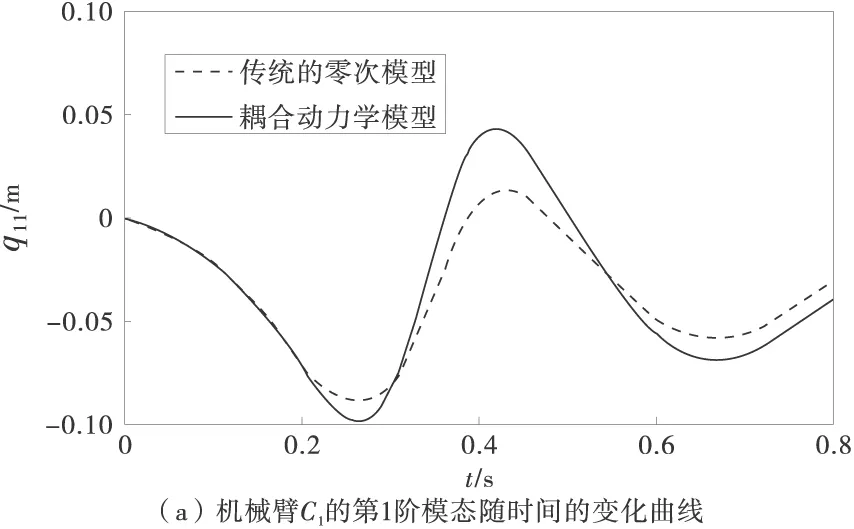
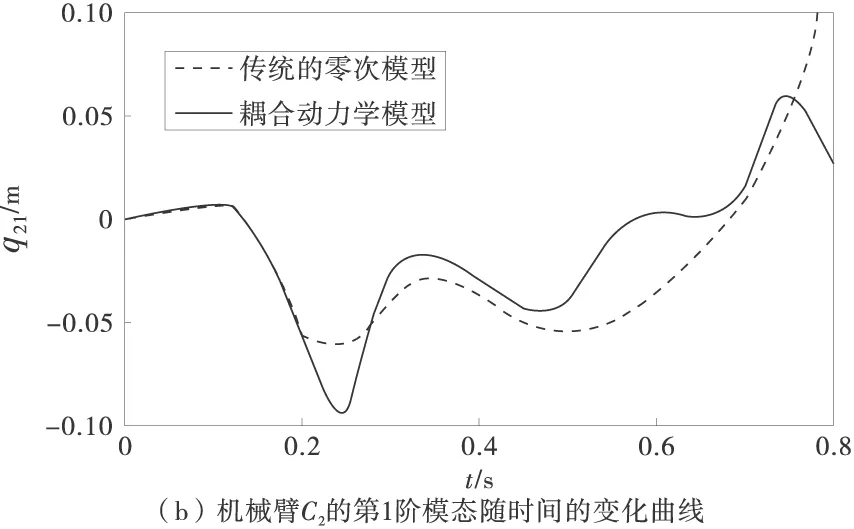
圖4 機械臂C1,C2的第1階模態隨時間的變化曲線
圖4可以看出,大范圍運動與變形產生的變形耦合對機械臂兩桿件振動特性的影響,運動和變形的耦合使得機械臂的頻率提高。對于末端機械臂A3,圖5描述了其端點的變形位移,可以看出此模型相比于傳統模型有了誤差,在柔性機械臂考慮空間運動的影響下,扭轉變形也會對系統的動力學特性產生較大影響。
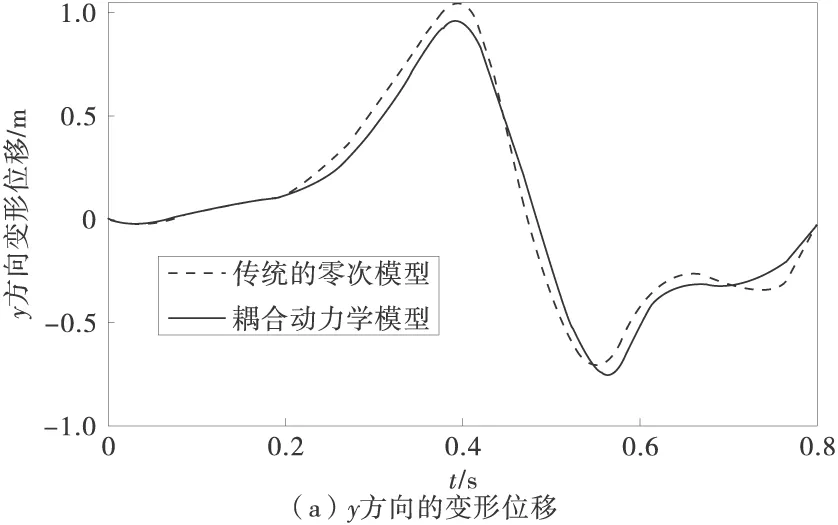
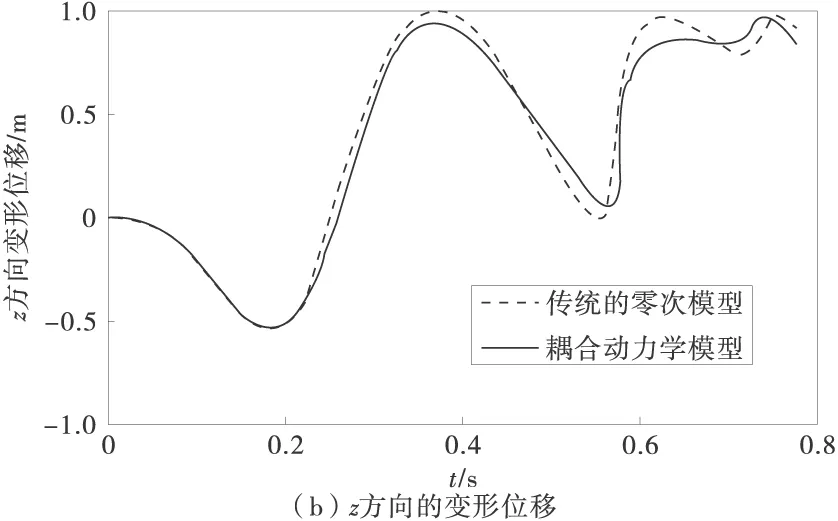
圖5 機械臂C3端點y,z方向的變形位移
通過以上分析,柔性機械臂作大范圍運動和桿件變形之間的耦合效應,對機械臂末端及頻率有著更大的影響。對于機械臂振動的抑制,空間位置控制以及軌跡規劃方面的研究,該模型都具有很大的理論指導意義。
4 結 論
旋量理論主要用于集中參數模型的剛體系統的運動學分析以及動力學,筆者將旋量理論擴展應用到作大范圍空間運動的柔性機械臂剛柔耦合動力學模型分析中,結合變形旋量,計及大范圍運動和桿件變形之間耦合效應以及變形耦合,并考慮了扭轉變形的影響,在對機械臂系統動能和勢能分析的基礎上,建立了剛-柔耦合動力學方程,最后進行了數值仿真分析,得到以下結論:
1)旋量以及變形旋量的應用,拓展了機械臂動力學研究的空間應用范圍,此方法考慮了機械臂空間各方位的變化以及扭轉變形的影響,體現了剛-柔耦合效應,更有利于研究作大范圍運動的機械臂。
2)機械臂大范圍運動與變形的耦合效應,會影響機械臂的振動特性,提高機械臂的頻率,對于末端執行構件的影響更大。傳統模型不能準確反映其特性,該模型豐富了作大范圍運動的柔性機械臂的建模理論。
[1] 贠今天,王樹新,郭福新,等.計及環境特征的剛-柔機械臂動力學建模方法與理論研究[J].機器人,2004,26(5):448-453. Yun Jintian,Wang Shuxin,Guo Fuxin,et al.Study on the dynamics modeling method and theory of rigid-flexible arm in consideration of environmental characteristics [J].Robot,2004,26(5):448-453.
[2] 王磊,王三民,牛治永.空間RRRP機械臂的剛柔耦合非線性動力學特性研究[J].振動與沖擊,2009,28(7):169-174. Wang Lei,Wang Sanmin,Niu Zhiyong.Nonlinear dynamical behavior analysis of a spatial rigid-flexible coupled RRRP-manipulator [J].Journal of Vibration and Shock,2009,28(7):169-174.
[3] Gouliaev V I,Zavrazhina T V.Dynamics of a flexible multi-link cosmic robot-manipulator [J].Journal of Sound and Vibration,2001,243(4):641-657.
[4] 韓清鵬,高培鑫.大范圍運動條件下的剛柔混合機械臂動力學分析[J].機械設計,2013,30(2):27-31. Han Qingpeng,Gao Peixin.Dynamic analysis of rigid-flexible manipulators undergoing a large overall motion condition [J].Journal of Machine Design,2013,30(2):27-31.
[5] 劉錦陽,洪嘉振.剛-柔耦合動力學系統的建模理論研究[J].力學學報,2002,34(3):408-415. Liu Jinyang,Hong Jiazhen.Study on modeling theory of rigid-flexible coupling dynamic system [J].Acta Mechenica Sinica,2002,34(3):408-415.
[6] 劉錦陽,洪嘉振.空間機械臂的剛-柔耦合動力學研究[J].宇航學報,2002,23(2):23-27. Liu Jinyang,Hong Jiazhen.Study on rigid-flexible coupling dynamics of space-based manipulator [J].Journal of Astronautics,2002,23(2):23-27.
[7] Martins J,Botto M A,Costa J S D.Modeling of flexible beams for robotic manipulators [J].Multibody System Dynamics,2002(7):79-100.
[8] 孔向東,鐘萬勰,齊朝暉.計及動力剛化項的柔性機械臂幾何非線性模型[J].機械科學與技術,1998,17(5):722-724. Kong Xiangdong,Zhong Wanxie,Qi Zhaohui.Geometric nonlinear model of flexible manipulators in consideration of dynamic stiffening terms [J].Mechanical Science and Technology,1998,17(5):722-724.
[9] 鄧峰巖,和興鎖,李亮,等.計及變形耦合的雙連桿柔性機械臂動力學模型[J].機械工程學報,2006,42(增刊1):69-73. Deng Fengyan,He Xingsuo,Li Liang,et al.Dynamic model of two-link flexible manipulator in consideration of coupling deformation terms [J].Chinese Journal of Mechanical Engineering,2006,42(Sup1):69-73.
[10] 丁希侖,J.M.塞里格.空間彈性變形梁動力學的旋量系統理論方法[J].應用數學和力學,2010,31(9):1118-1132. Ding Xilun,Selig J M.Screw theoretic view on dynamics of spatially compliant beam [J].Applied Mathematics and Mechanics,2010,31(9):1118-1132.
Flexible Manipulator Rigid-Flexible Coupling Dynamic Model Based on Spatial Deformation Beam
Luo Tianhong, Huang Shifu, Chen Cai, Liu Miao, Dong Shaojiang
(School of Mechanical-Electrical & Automotive Engineering, Chongqing Jiaotong University, Chongqing 400074)
Aiming at the manipulator which did spatial motion in a large range, a rigid-flexible coupling dynamic modeling approach of the industrial robot manipulator based on deformation screw theory was proposed, and the influence of robotic spatial deformation coupling and torsional deformation on the dynamic characteristics was researched. The rigid-flexible coupling dynamic theory model of flexible manipulator in a wide range of spatial motion was established, and the model applied manipulator to the spatial extent. Considering the influence of torsional deformation, the calculation simulation analysis on the model was carried out and the analysis results were compared with those of the traditional zero order model. The results indicate that the establishment of large range motion manipulator dynamics equation and the application of screw theory solve the limitations that traditional mathematical methods are limited to planar motion; the coupling between large range motion and manipulator deformation has an impact on the manipulator rod and terminal; considering deformation coupling, the manipulator dynamics characteristics will change and the manipulator vibration frequency will increase.
electromechanical engineering; screw theory; flexible manipulator; rigid-flexible coupling; dynamics model
10.3969/j.issn.1674-0696.2015.04.35
2014-05-03;
2015-04-02
國家自然科學基金項目(51375519)
羅天洪(1975—),男,四川資陽人,教授,博士后,主要從事機電液多領域仿真、數字化設計與分析方面的研究。E-mail:tianhong.luo@163.com。
TH113
A
1674-0696(2015)04-176-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
