半主動空氣懸架自適應小波消噪與試驗*
2015-06-09 12:36:07汪若塵錢金剛李嬌嬌
振動、測試與診斷 2015年3期
汪若塵, 陳 欣, 錢金剛, 李嬌嬌, 陳 龍
(江蘇大學汽車與交通工程學院 鎮江,212013)
半主動空氣懸架自適應小波消噪與試驗*
汪若塵, 陳 欣, 錢金剛, 李嬌嬌, 陳 龍
(江蘇大學汽車與交通工程學院 鎮江,212013)
為了消除半主動空氣懸架系統因非線性、參數時變性及模型的不確定性帶來的噪聲干擾,研究了半主動空氣懸架小波消噪的工作機理,設計了半主動空氣懸架的小波消噪神經元自適應控制器,建立了基于小波降噪的半主動空氣懸架的動力學模型。在仿真的基礎上,進行了臺架試驗研究,分析了小波降噪的有效性。結果表明,基于小波消噪的神經元自適應控制的半主動空氣懸架,改善了車輛質心加速度及俯仰角加速度,提高了整車綜合性能。
半主動空氣懸架; 自適應控制; 小波降噪; 臺架試驗
引 言
半主動空氣懸架系統本身具有非線性、參數時變性及模型不確定性,在實際運行中不僅存在自身部件運動的相互干涉,同時也受到車輛的其他部件的影響[1-5];因此,其測量信號可能包括許多尖峰或突變部分。若直接把測量所得的帶噪信號作為控制器的輸入,會對控制器的參數整定造成干擾,進而影響控制器的控制效果。對這種信號進行分析,首先需要作信號的預處理,經過消噪過程,將信號的噪聲部分去除,提取有效信號。
傳統的消噪方法是將被噪聲污染的信號通過一個濾波器,濾掉噪聲頻率成分。但對于瞬態信號、寬帶噪聲信號、非平穩信號等,采用傳統的濾波方法具有一定的局限性。小波變換已被廣泛應用在信號處理領域。通過小波變換,可以把信號的特性分配到各個不同尺度的小波變換系數上,通過對小波變換系數的分析與處理,就可以對信號進行壓縮、奇異性檢測以及消除噪聲。小波降噪具有廣泛的函數適應性和最優的自適應降噪能力[6]。
筆者建立了半主動空氣懸架的動力學模型,設計了基于小波降噪的半主動空氣懸架神經元自適應控制器,通過仿真分析與試驗,研究了半主動空氣懸架神經元自適應控制的小波降噪的效果。
1 半主動空氣懸架模型
客車前懸架采用的是非獨立懸架,由空氣彈簧、減振器、推力桿系、橫向穩定桿、轉向橫拉桿等組成。為簡化圖形,以右側前懸架為例,基于SIMPACK軟件,畫出拓撲結構如圖1所示。

圖1 前懸架拓撲圖Fig.1 The topological graph of front suspension
后懸架也為非獨立懸架,由空氣彈簧、減振器、導向機構、橫向穩定桿等組成,其右側基于拓撲結構如圖2所示。
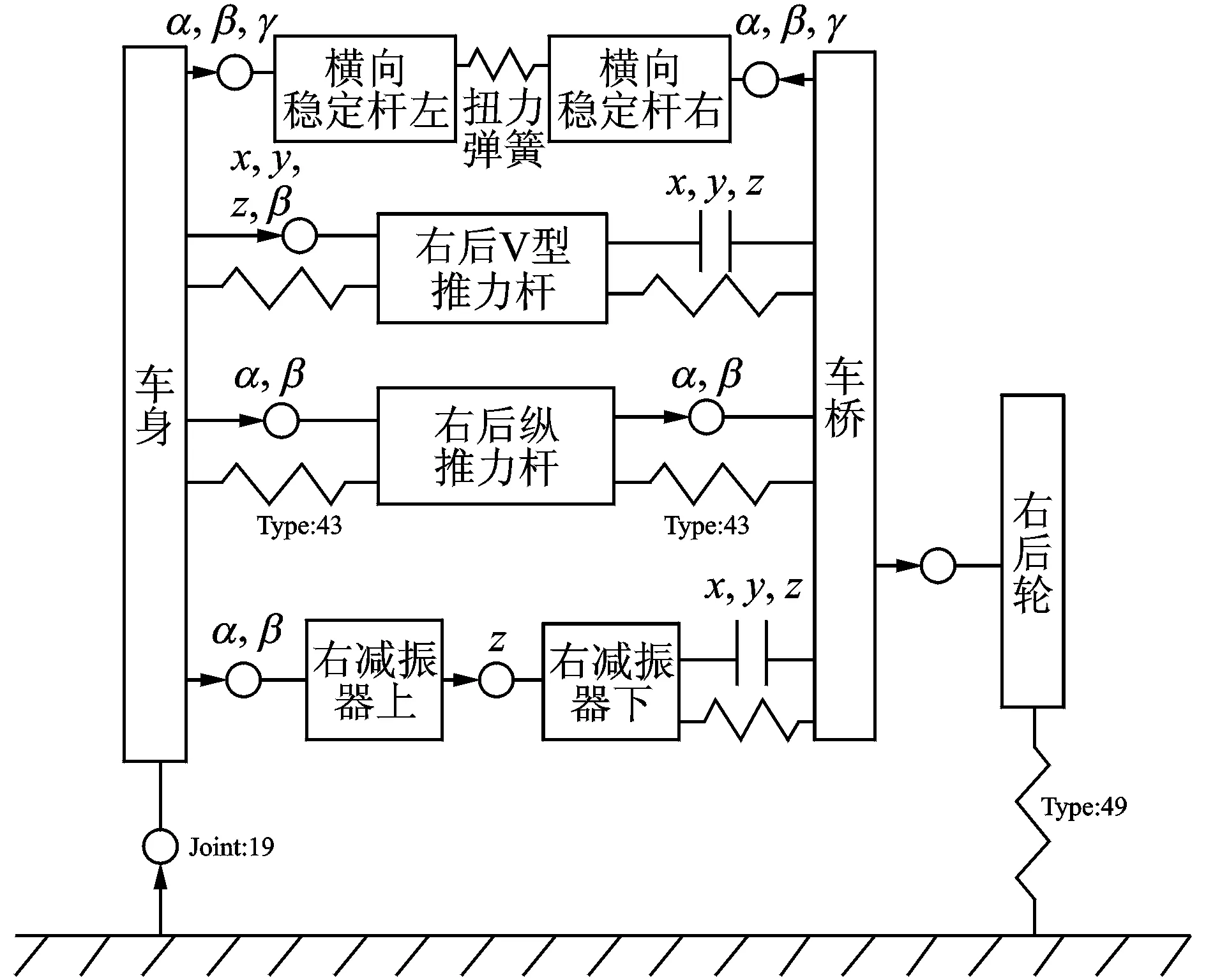
圖2 后懸架拓撲圖Fig.2 The topological graph of rear suspension
將以上兩個子系統模型組合在一起,定義車身與系統坐標系的鉸接為6自由度汽車鉸接,建立整車模型,半主動空氣懸架參數參考文獻[7]。
2 小波消噪的神經元自適應控制
假設用小波進行多分辨率小波分解所需要的最小數據數量為m,其中m∈N,m≥1。那么,實時小波降噪的過程如下:當k
在空氣懸架大客車運行過程中主要存在兩種噪聲源,一種是由傳感器測量過程中引起的干擾,另一種是系統各部件之間的互相干擾,兩者均為零均值的高斯分布白噪聲。隨著試驗儀器的改進,傳感器精度提高,測量噪聲的標準差在數量級上得到大幅度減小。筆者主要考慮系統干擾噪聲對車輛控制性能的影響。半主動空氣懸架神經元自適應控制器的設計參考文獻[7]。
由于系統噪聲是高斯分布的白噪聲,故仿真時在系統輸出中混入一定強度的高斯白噪聲,模擬實際半主動空氣懸架系統的輸出信號。采用前面提到的小波實時消噪的方法,利用Matlab編寫小波實時消噪的S函數,控制系統的框圖如圖3所示。

圖3 基于小波消噪的控制系統框圖Fig.3 Control system block diagram based on wavelet denoising
3 仿真分析
建立基于小波消噪的單神經元自適應控制系統,在B級路面下以車速為40,50,60 km/h的系統狀態為分析對象,在測量的加速度輸出中加入白噪聲干擾,進行噪聲干擾下的神經元自適應控制聯合仿真。筆者主要考慮對垂向振動的消噪效果,仿真結果如圖4及表1所示。
由圖4,5,6及表1可知,半主動空氣懸架系統輸出含噪的加速度信號,得到的系統信號稍有毛刺及尖峰,通過小波消噪對其進行預處理,有效過濾了噪聲信號。帶有小波消噪的控制器,改善了車輛動態性能,提高了整車綜合性能。

圖4 車速為40 km/h時仿真結果Fig.4 Simulation result at the speed of 40 km/h
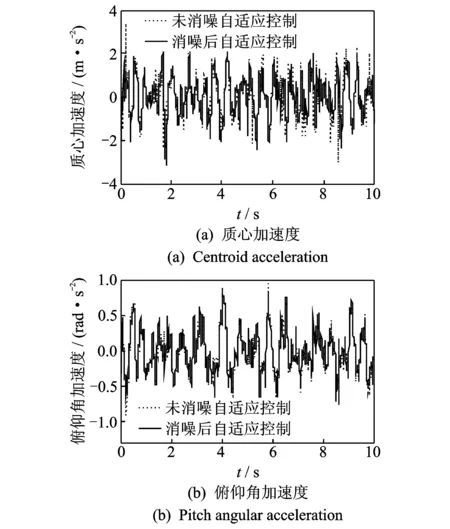
圖5 車速為50 km/h時仿真結果Fig.5 Simulation result at the speed of 50 km/h
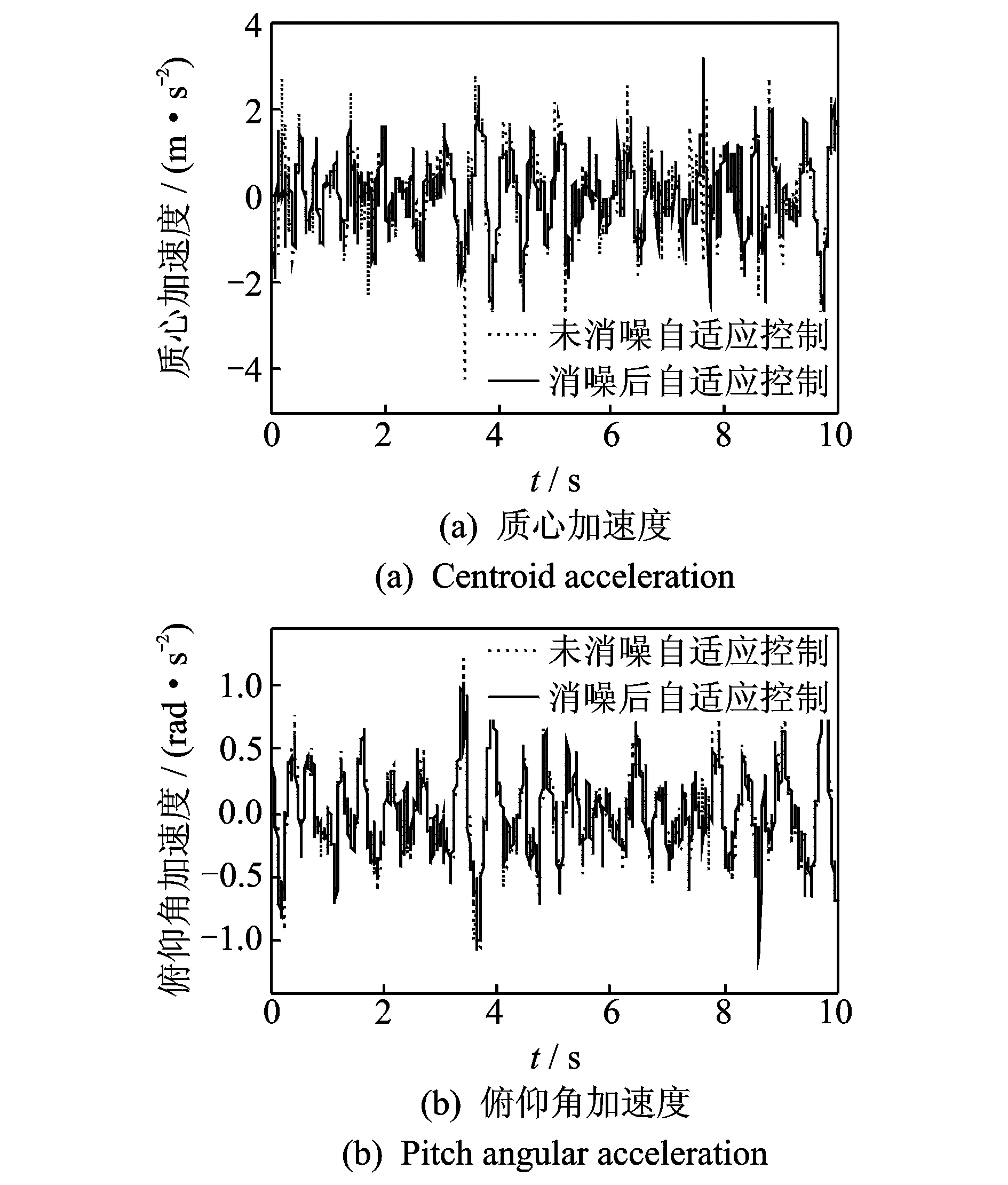
圖6 車速為60 km/h時仿真結果Fig.6 Simulation result at the speed of 60 km/h
4 試驗研究
為了進一步驗證含小波消噪的自適應控制策略的有效性,建立了半主動空氣懸架臺架試驗系統。半主動空氣懸架試驗臺架主要包括簧載質量、非簧載質量、空氣彈簧、減振器,另外還包括激振系統、傳感器、充放氣系統、夾具、導向機構等輔助設備以及數據采集系統,如圖7所示。
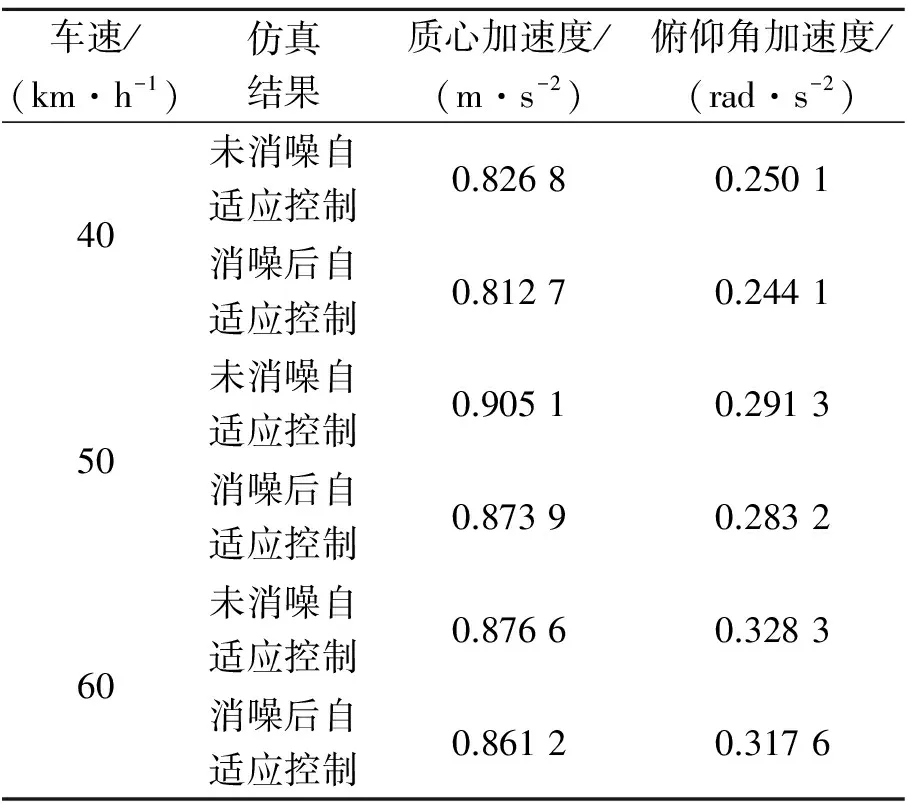
表1 懸架性能對比

圖7 半主動空氣懸架試驗臺架Fig.7 The bench test of semi-active air suspension
為了更全面地驗證控制策略的有效性,試驗中模擬B,D級路面激勵,車速為50,80 km/h時半主動空氣懸架的動態性能,結果如圖8及表2所示。
由圖8及表2可知,含小波降噪的自適應控制半主動空氣懸架改善了車輛動態性能,提高了整車綜合性能。
5 結 論
1) 建立的基于小波降噪的半主動空氣懸架動力學模型正確,可滿足仿真分析的要求。

圖8 B級路面試驗結果對比圖(50 km/h)Fig.8 The comparison of experiment result on B level road (50 km/h)
表2 臺架試驗結果
Tab.2 Experiment result of the bench test

車速/(km·h-1)路面等級車身加速度/(m·s-2)控制前控制后性能改善/%懸架動行程/m控制前控制后性能改善/%輪胎動載荷/kN控制前控制后性能改善/%50B級0.90850.756016.70.00970.008611.303145.43389.2-7.19D級1.14720.953516.80.01100.009513.604032.14235.7-4.8180B級1.30491.106315.20.01450.012712.405048.35222.5-3.45D級1.50471.238117.70.02350.020214.046073.56251.9-2.94
2) 進行小波降噪的半主動空氣懸架系統車身質心加速度與俯仰角加速度衰減明顯,改善了車輛行駛平順性,提高了整車綜合性能。
[1] 黃俊明,周孔亢,徐興,等. 電子控制空氣懸架高度調節過程非線性模型[J]. 機械工程學報,2009,45(6):278-283.
Huang Junming, Zhou Kongkang, Xu Xing, et al. The non-linear model of electronically controlled air suspension height adjustment process[J].Jounal of Mechanical Engineering, 2009,45(6):278-283. (in Chinese)
[2] 宋宇. 空氣懸架車輛ADAMS與MATLAB聯合仿真研究[J]. 汽車技術,2008(10): 40-43.
Song Yu.The ADAMS and MATLAB co-simulation of vehicle air suspension[J]. Automotive Technology, 2008(10): 40-43. (in Chinese)
[3] 郭二生. 空氣懸架大客車操縱穩定性和行駛平順性仿真與試驗研究[D].吉林:吉林大學, 2004.
[4] Mahmoudian P, Kashani R. Active stiffness and damping control of air mounted/suspended systems[C]∥ASME International Mechanical Engineering Congress and Exposition. Boston: MA, 2009: 531-544.
[5] Stone E J, Cebon D. An experimental semi-active anti-roll system[J]. Journal of Automobile Engineering, 2008, 222 (12): 2415-2433.
[6] Nieto A J, Morales A L, Chicharro J M, et al. Unbalanced machinery vibration isolation with a semi-active pneumatic suspension[J]. Journal of Sound and Vibration, 2010, 329(1): 3-12.
[7] 李嬌嬌.基于SIMPACK的空氣懸架大客車建模與仿真研究[D].鎮江:江蘇大學,2011.

10.16450/j.cnki.issn.1004-6801.2015.03.028
*國家自然科學基金資助項目(50905078);江蘇省自然科學基金資助項目(BK2012714);江蘇省333工程資助項目;江蘇省六大人才高峰和江蘇省青藍工程資助項目
2013-08-15;
2015-02-15
U463.33+5.1
汪若塵,男,1977年12月生,教授、博士生導師。主要研究方向為車輛動態性能模擬與控制。曾發表《車輛慣容器-彈簧-阻尼器半主動懸架模糊控制》(《農業機械學報》2013年第43卷第12期)等論文。 E-mail:wrc@ujs.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
