彈性模量對柔性仿生魚尾振動行為的影響*
2015-06-10 00:34:45官源林李華峰楊熙鑫狄思思
振動、測試與診斷 2015年1期
官源林, 李華峰, 楊熙鑫, 狄思思
(1.南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)(2.青島大學軟件技術學院 青島,266100)
?
彈性模量對柔性仿生魚尾振動行為的影響*
官源林1, 李華峰1, 楊熙鑫2, 狄思思1
(1.南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)(2.青島大學軟件技術學院 青島,266100)
針對采用各向同性材料為基板的仿生魚尾剛度大、變形小的情況,研究基板材料彈性模量對于柔性復合型仿生魚尾振動行為的影響。首先,通過使用粗壓電纖維復合材料(macro fiber composite,簡稱MFC)作為驅動器,設計了一種柔性仿生魚尾結構,運用COMSOL Multiphysics有限元軟件模擬了具有相同泊松比和密度的基體材料在不同彈性模量下的魚尾振動情況,得出魚尾擺動位移與彈性模量間的極值關系;然后,對比此種彈性模量下各向同性材料與各向異性材料,得到各向異性材料適合作為基體材料的結論;最后,根據仿真結果制備出各向異性基體材料,與MFC相結合得到柔性魚尾,再對其進行振動性能測試實驗。實驗結果驗證了數學模型的合理性及設計的可行性。
粗壓電纖維復合材料; 玻璃纖維復合材料; 彈性模量; COMSOL有限元軟件
引言
魚類推進模式的研究是新型仿生魚水下推進器的研究基礎。Breder首先依據魚類推進模式不同對其進行分類[1],分為身體/尾鰭模式(body and/or caudal fin, 簡稱BCF)和中央鰭/對鰭模式(median and/or paired Fin, 簡稱MPF)。BCF模式是借助身體波動運動或尾鰭擺動運動產生推進力,MPF模式主要借助尾鰭以外的運動產生推進力[2-3]。BCF模式能夠產生大推力并具有高速巡游和快速啟動的能力[4-5],因而受到研究者的廣泛關注。
隨著智能材料的不斷涌現,具有小型化、機動性強、隱蔽性好和噪聲污染小等特點的仿生魚已成為一個熱門研究對象。鎳鈦形狀記憶合金驅動[6-7]、超磁致伸縮薄膜[8-9]、人工肌肉(ion-exchange polymer metal composite,簡稱IPMC)[10-11]等材料已應用于此領域。考慮到這些材料的自身缺陷,研究者開始了對復合材料的探索。粗壓電纖維復合材料(macro fiber composite,簡稱MFC)在1996年首先被NASA發明,2002年其作為專利發明在世界范圍內被廣泛應用。它把若干根矩形壓電陶瓷(PZT5A)棒嵌入在膠層、電極和聚酰亞胺薄膜中,具有柔韌性好、變形量大以及面內各向異性等特點。國內外學者已經將MFC應用于仿生魚的研究[12-13],采用的基體材料分別為鋁板或者碳纖維板。
目前,多數研究者采用一種基體材料直接研究仿生魚的運動情況,尚未見到對仿生魚的基體材料進行研究的文獻。筆者研究基體材料對仿生魚尾的影響。根據材料的性質,可分為各向同性和各向異性材料。它們的主要區別在于彈性模量的表示方法不同,而彈性模量相比較密度而言對仿生魚的振動行為影響更大。筆者基于BCF模式設計出一種柔性復合型仿生魚尾,并分析基體材料的彈性模量對仿生魚尾振動的影響。首先,模擬魚尾結構,優化模型,分析并確定了其振動模態;然后,通過改變基體材料的彈性模量來研究材料對魚尾振動位移的影響;最后,制備基體材料,設計出魚尾并進行振動測試,以驗證仿真模型的合理性。
1 仿生魚尾結構設計
仿生魚尾分為驅動和尾鰭兩部分。驅動部分選用的驅動元件是MFC(M8528-P1),具體參數如表1所示。整個魚尾結構示意圖如圖1所示,這種材料具有逆壓電效應,可產生橫向 (圖1所示1(z)方向)伸縮變形。考慮魚尾運動多為左右平動 (圖1所示3(x)方向),則在MFC底部增加基板,使整個機構產生彎曲振動。
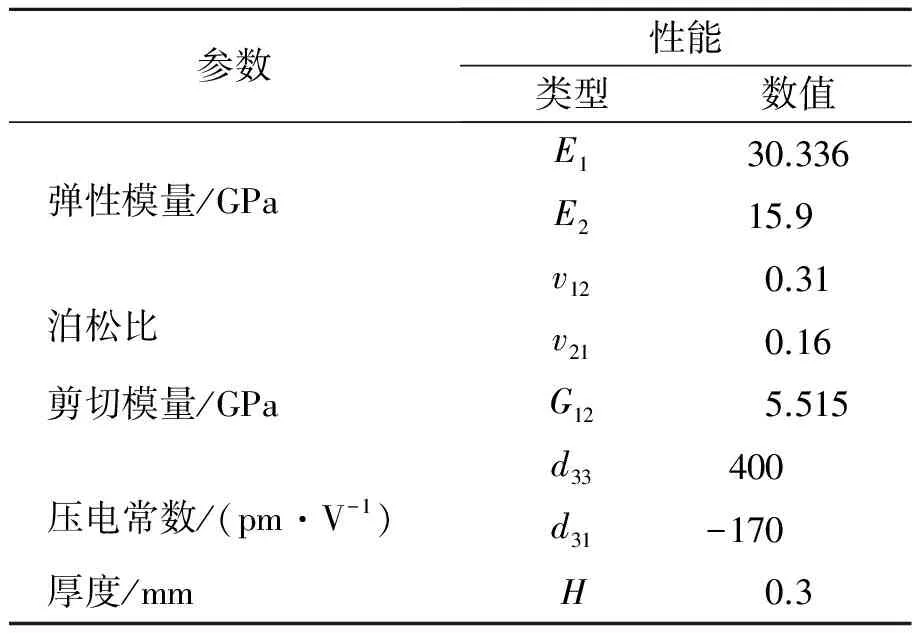
表1 MFC的性能參數
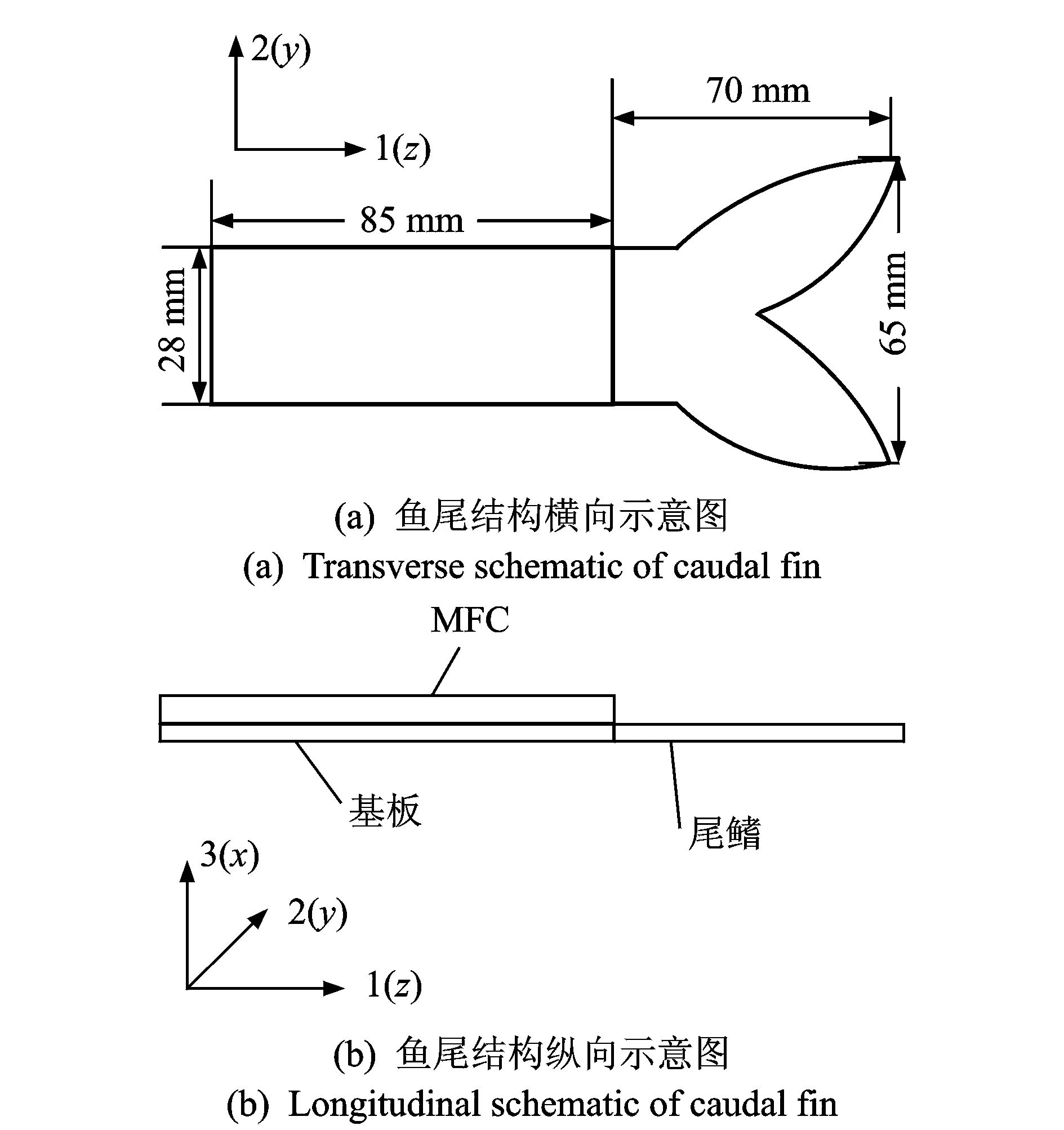
圖1 魚尾結構示意圖Fig.1 Diagram of tail structure
2 魚尾仿真計算
為研究魚尾振動行為,在COMSOL Multiphysics有限元軟件中根據如圖1所示的魚尾的預設尺寸建立三維模型。其中,驅動部分(具有MFC部分)的厚度為0.5 mm,尾鰭厚度為0.2 mm。由于魚尾設計中的厚度遠小于長度和寬度值,因此魚尾可被作為一個薄板來考慮,且驅動元件產生的位移遠大于其厚度值,屬于大變形,因此在計算過程中考慮運用幾何非線性特性。網格作為仿真計算的一個重要因素,直接影響結果的收斂性和計算精度,因此整個網格尺寸都采用較細化劃分。圖2為有限元網格模型。這種網格既減少了計算量,又滿足計算結果收斂的要求。根據BCF推進模式,魚尾只占整條魚的1/3,且一端固定不動,而另一端是自由的,因此可將其看作為一個懸臂結構。設定邊界條件為魚尾左端固定約束,其余部分自由。
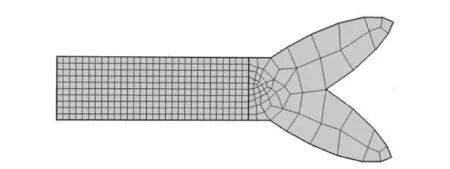
圖2 魚尾有限元模型Fig.2 Finite element model of caudal fin
為了具體分析彈性模量對魚尾擺動位移的影響,在基板和尾鰭的外表面選取貫穿整個魚尾的一條截線,如圖3所示。整個模擬過程處于空氣中,提供給MFC為700 V無偏置的峰峰值電壓,由此分析彈性模量對魚尾振動位移的影響。
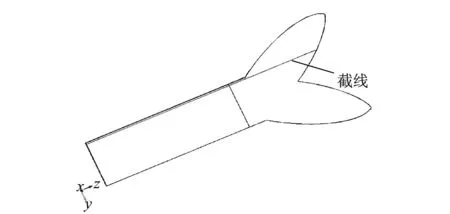
圖3 魚尾的三維截線圖Fig.3 3D sectional diagram of caudal fin
首先, 分析基體為鋁板的魚尾振動情況。鋁板的彈性模量為70 GPa,密度為2 700 kg/m3,泊松比為0.33,此時魚尾共振頻率為12.2 Hz,在此頻率下截線上各點總位移的一維圖如圖4所示,其中最大振動位移為6.578 8 mm。然后, 分析彈性模量為20 GPa,泊松比為0.33,密度為1 000 kg/m3的各向同性材料在共振頻率為13.8 Hz時,振動位移為6.377 3 mm。最后,選取基體為相同密度和泊松比的彈性模量分別為15,10和3 GPa三種各向同性材料,在各自共振頻率為13.1,11.7和9.9 Hz時,對應的振動位移分別為6.532 8,7.040 6和6.767 8 mm,這些截線上的位移如圖5所示。通過圖 5各條曲線進行對比發現,在材料具有相同密度和泊松比的條件下,隨著彈性模量的減小,振動位移先增大后減少,在彈性模量為10 GPa時,各向同性材料位移達到最大,此材料適合于本結構模型。
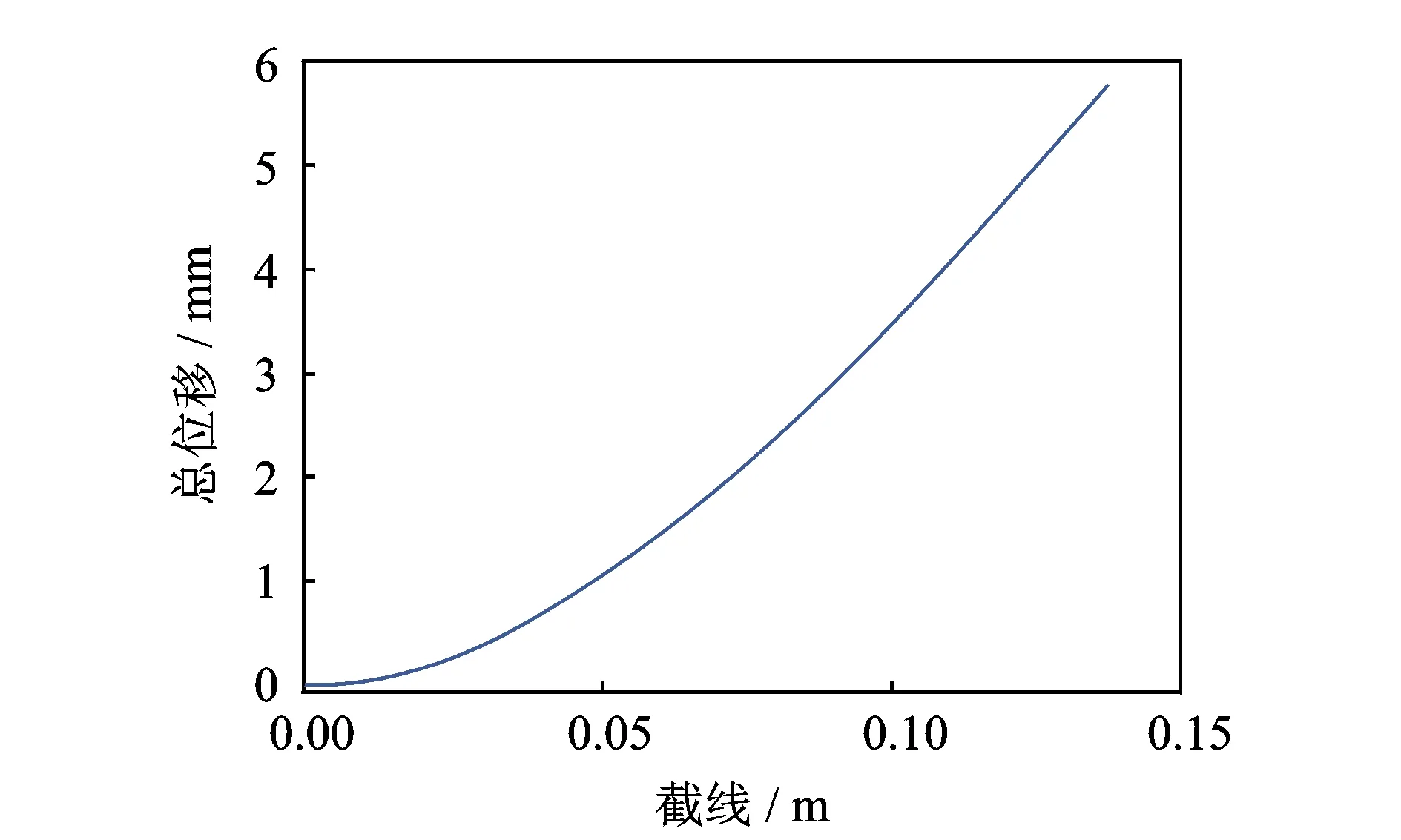
圖4 基體為鋁板截線上各點位移Fig.4 Displacement of caudal fin on the cutting line for the aluminum as the substrate
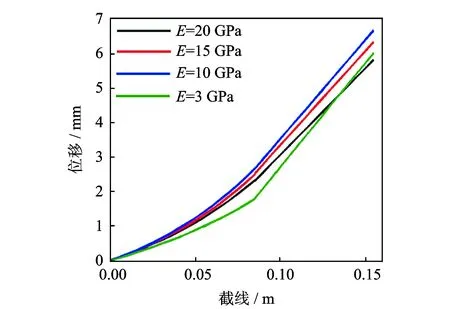
圖5 各向同性材料彈性模量分別為20,15,10和3 GPa的位移圖Fig.5 Displacement of caudal fin based on different elastic modulus of isotropic materials
但是質量輕、隱身性強且要滿足彈性模量為10 GPa的各向同性材料不易尋找,而該彈性模量的復合材料屢見不鮮。為了與各向同性材料進行對比,采用彈性模量為表2所示的4種復合材料作為基體來模擬魚尾的振動情況。基體為復合材料1,2,3,4的魚尾在共振頻率分別為12.5,11.3,8.7和7 Hz時相對應的振動位移分別為2.874 5,3.819 1,5.856和4.411 3 mm,這些截線上位移如圖6所示。對圖6中各條曲線進行對比,同樣是彈性模量為10 GPa的材料位移最大,在一定彈性模量范圍內存在適合本模型的彈性模量。圖7為以上各向同性和各向異性材料的不同彈性模量在共振情況下對應的振動位移。
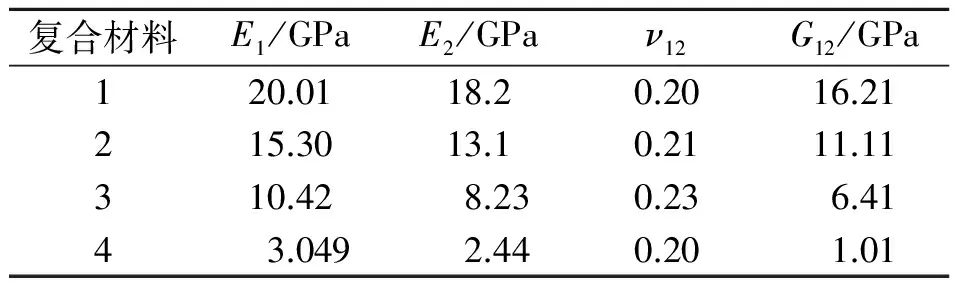
表2 復合材料性能參數
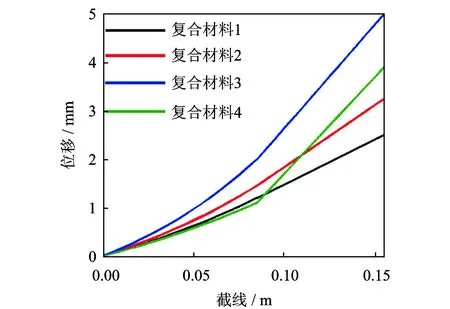
圖6 基體材料為不同復合材料彎曲位移Fig.6 Displacement of caudal fin for different composites as the substrate
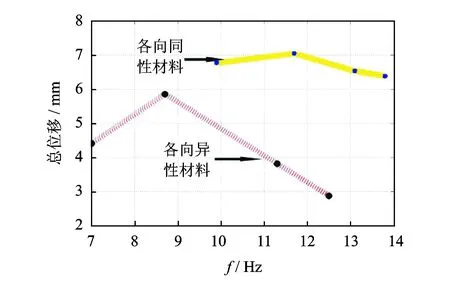
圖7 不同彈性模量在共振情況下振動位移Fig.7 Resonance vibration displacement about different elastic modulus
根據圖6得到復合材料3為基體的魚尾變形最大,基體為復合材料4的魚尾在基板與尾鰭交接處突變最大,因此給出采用基板為復合材料3、尾鰭為復合材料4的組合魚尾,并且得到在共振頻率為8.5 Hz時魚尾振動的最大位移為9.928 3 mm,其截線上各點位移如圖8所示。
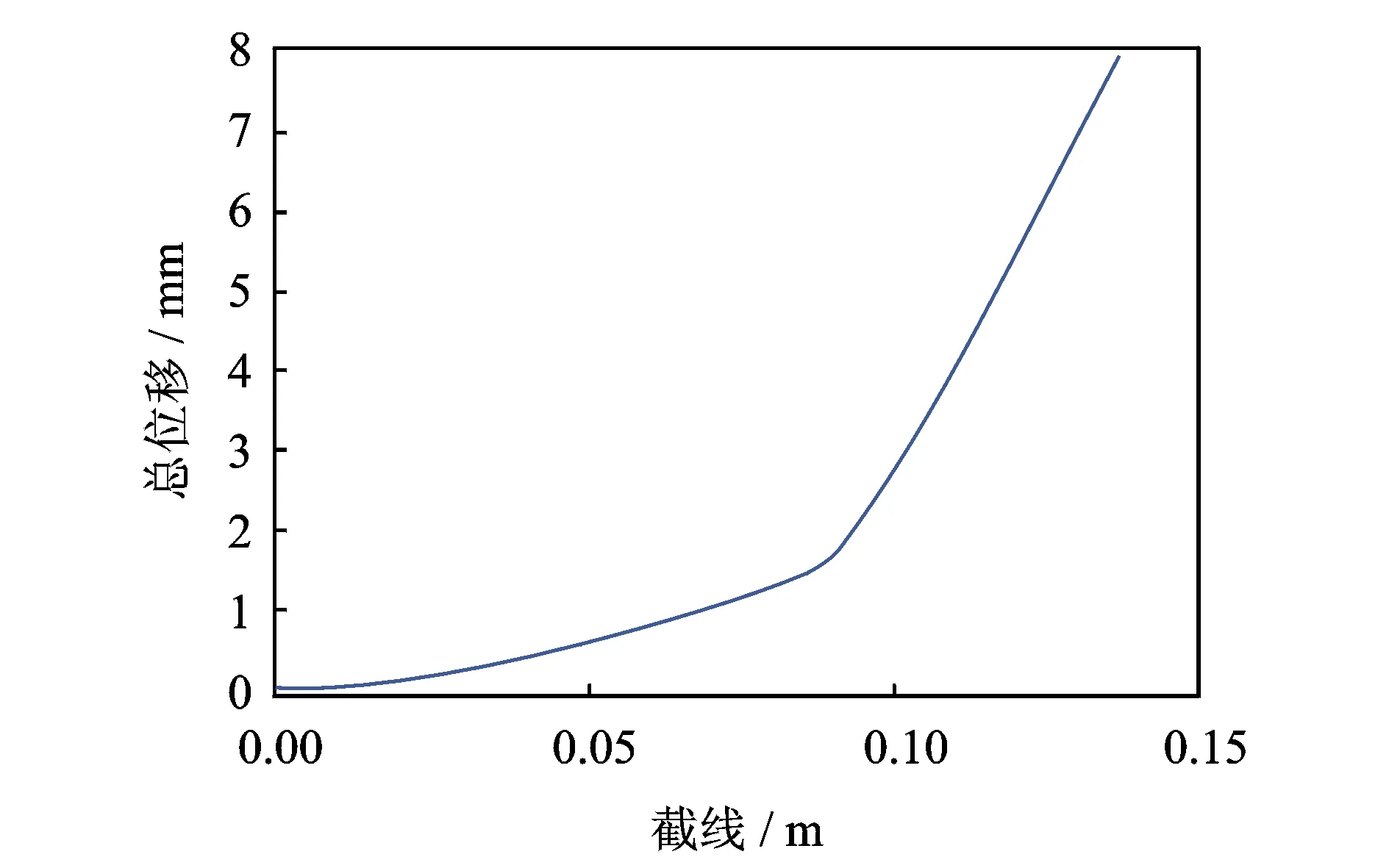
圖8 基板材料為復合材料3、尾部材料為復合材料4截線上各點位移Fig.8 Displacement of caudal fin on each point based on composite material 3 as the substrate and composite material 4 as the fin
圖9為基體材料分別為鋁、復合材料1和2構成的魚尾彎曲位移圖,可見,對于本模型結構復合材料3和4是最適合的。
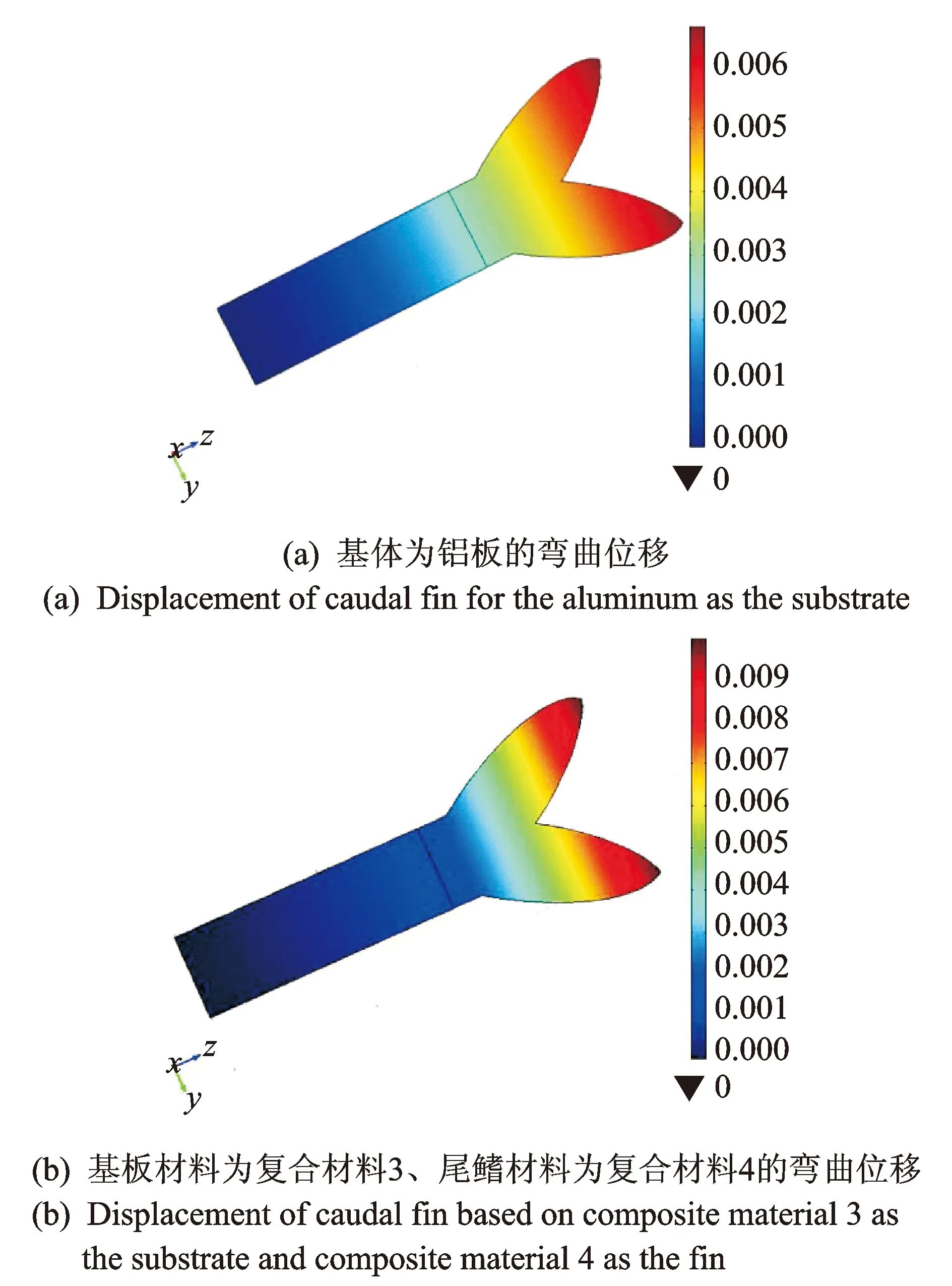
圖9 基體材料分別為鋁板和復合材料的彎曲位移Fig.9 Displacement of caudal fin based on the aluminum and composites
3 魚尾振動實驗
在實驗中采用玻璃纖維增強復合材料,它是用玻璃纖維或其織物以及增強合成樹脂,通過涂布、注塑、擠塑和層壓等方法加工成形,其重量輕、比強度高,具有各向異性的特點。復合材料3是由環氧樹脂和厚度為0.16 mm玻璃纖維布制成的玻璃纖維環氧增強復合材料。復合材料4是由聚氨酯和厚度為0.1 mm玻璃纖維布制成的玻璃纖維聚氨酯增強復合材料。各性能參數如表2所示。魚尾驅動部分是由玻璃纖維環氧增強型復合材料與MFC(具有壓電特性的實際長度和寬度分別為85 mm和28 mm)組合而成,并在真空箱中用高剪切強度環氧樹脂粘結,使整體厚度控制在0.6 mm左右。尾鰭采用玻璃纖維聚氨酯增強型復合材料,結構如圖10所示。將魚尾固定在夾具上,利用信號發生器和低頻功率放大器給MFC施加電壓,采用CCD激光位移傳感器測量魚尾振動的MFC末端和魚尾末端的最大位移。整個魚尾振動過程通過攝錄機記錄,整個實驗設備如圖11所示。
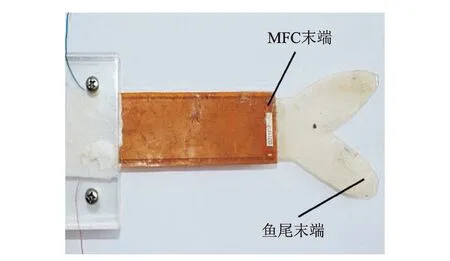
圖10 實驗結構圖Fig.10 Experimental structure diagram

圖11 魚尾振動實驗Fig.11 Vibration experiment of the caudal fin
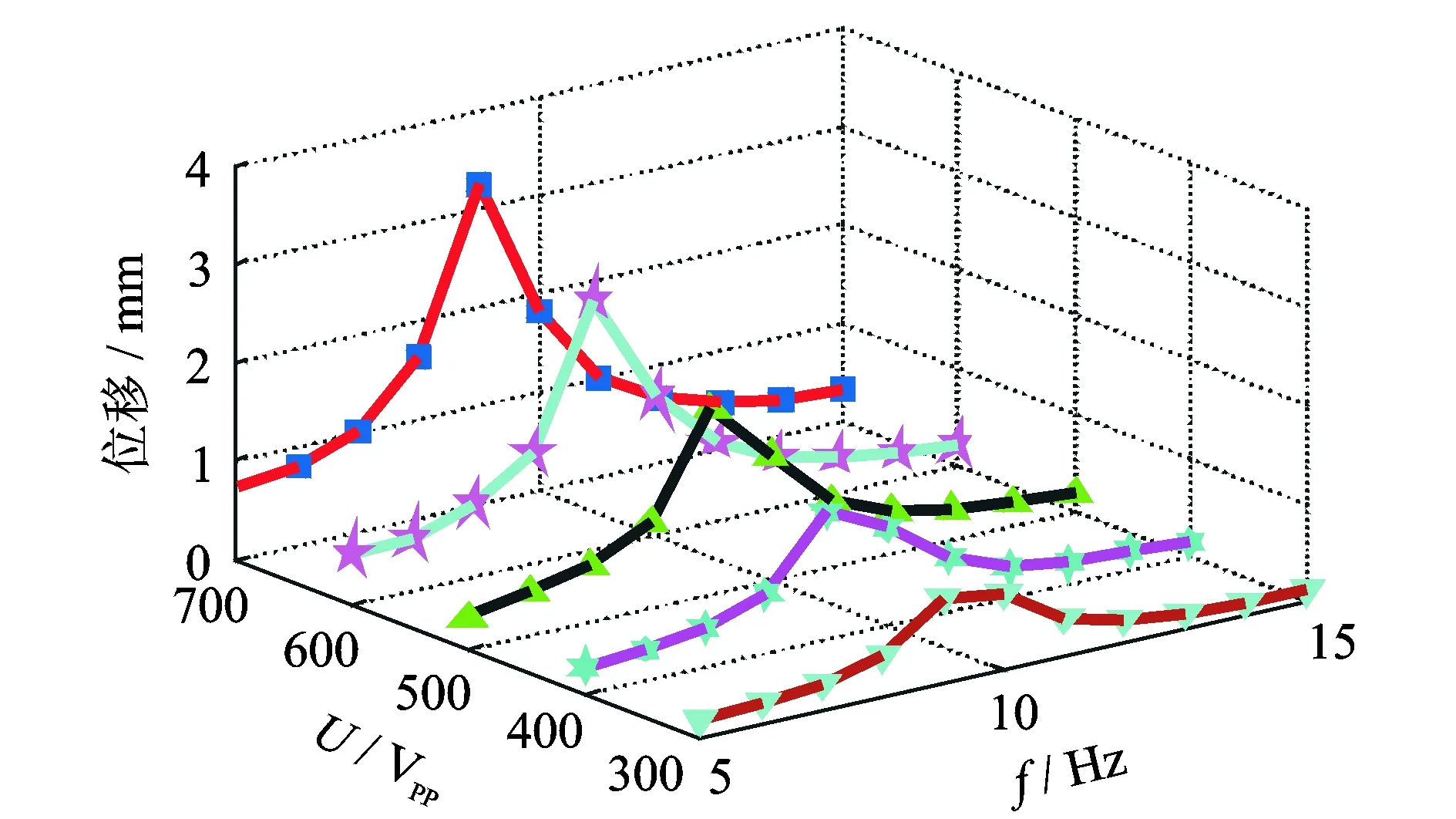
圖12 驅動部分MFC末端位移Fig.12 Displacement of end of MFC
考慮到MFC的允許工作電壓范圍為-500~1 500 V,無直流偏置電壓最大峰峰值輸入電壓為1 kV,具有直流偏置最大峰峰值輸入電壓為2 kV。本實驗采用無直流偏置最大峰峰值輸入電壓為700 V。圖12為峰峰值電壓分別為300,400,500,600和700 V、在5~15 Hz范圍內、不同頻率MFC末端位移圖。根據振動理論中共振時位移最大的特點,由圖12可以看出,共振頻率為9 Hz、在700 V峰峰值電壓下最大位移值為3.244 mm。
圖13顯示尾部從動部分末端位移量和變形角度。按照上述實驗方法測量,得到最大位移為7.212 3 mm,最大偏轉角度為28.37°。雖然實驗結果與仿真結果有一定的誤差,但是在允許范圍內,驗證了該仿真模型的合理性,為進一步優化結構提供了理論基礎。
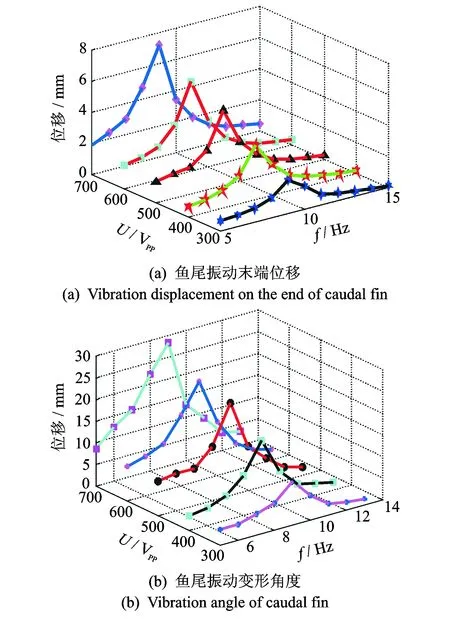
圖13 魚尾振動分析Fig.13 Analysis of caudal fin
4 結束語
主要討論了不同的基體材料對魚尾振動的影響。提出了一種采用粗壓電纖維復合材料驅動的仿生魚尾,利用仿真軟件建立了數學模型,采用改變基體材料的彈性模量方式分析了其對魚尾擺動位移的影響,得出了復合材料比各向同性材料更適合作為本模型的基體材料。通過對制備出的基體材料進行振動實驗,驗證了仿真的正確性,確定了玻璃纖維環氧增強復合材料為基板,玻璃纖維聚氨酯增強復合材料為尾鰭對于本設計的合理性。
[1] Breder C M. The locomotion of fishes[J]. American Zoologist, 1926,4:159-297.
[2] Webb P W. Form and function in fish swimming[J]. American Zoologist, 1984,251(1):58-68.
[3] Webb P W. Body form locomotion and foraging in aquatic vertebrates[J]. American Zoologist, 1984,24:107-120.
[4] Sfakiotakis M, Lane D M, Davies J B C. Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Oceanic Engineering, 1999,24(2):237-252.
[5] Azuma A. The biokinetics of flying and swimming[M]. Aeronautical Engineering, Reston VA: AIAA, 2006:5-200.
[6] Webb G, Wilson L. Adaptive control of shape memory alloy actuators for underwater biomimetic applications[J]. Aiaa Journal, 2000,38(2):325-334.
[7] Shinjo N, Swain G W. Use of a shape memory alloy for the design of an oscillatory propulsion system[J]. IEEE Journal of Oceanic Engineering, 2004,29(3):750-755.
[8] Xu Xinsheng, Sun Faming. The control and optimization design of the fish-like underwater robot with the aid of the giant magnetostrictive material actuator[J]. Journal of Vibration and Control, 2009,15(10):1443-1462.
[9] Sun Faming, Xu Xinsheng. Non-linear vibration and dynamic characteristic of fish-like robot controlled by GMM actuator[J]. Journal of Intelligent Material Systems and Structures, 2009,20(12):1503-1513.
[10] Aureli M, Kopman V. Free-locomotion of underwater vehicles actuated by ionic polymer metal composites[J]. IEEE-ASME Transactions on Mechatronics, 2010,15(4):603-614.
[11]Peterson S D, Porfiri M. A particle image velocimetry study of vibrating ionic polymer metal composites in aqueous environments[J]. IEEE-ASME Transactions on Mechatronics, 2009,14(4):474-483.
[12]Erturk A, Delporte G. Underwater thrust and power generation using flexible piezoelectric composites: an experimental investigation toward self-powered swimmer-sensor platforms[J]. Smart Material and Structure, 2011,20(12):5013-5024.
[13]Shintake J, Aiguo M, Shimojo M. A novel propulsion method of flexible underwater robots[C]∥2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: [s.n.], 2011:4735-4740.
*國家自然科學基金資助項目(51175250);中央高校基本科研業務費專項資金資助項目(NJ2013006,NS2012033,CXLX12_0144);江蘇省普通高校研究生科研創新計劃資助項目(CXLX12_0144);高等學校創新引智計劃資助項目(B12021);江蘇高效優勢學科建設工程資助項目(PAPD)
2013-05-13;
2013-07-10
10.16450/j.cnki.issn.1004-6801.2015.01.002
TH111; TH14
官源林,男,1983年5月生,博士研究生。主要研究方向為小型仿生魚尾研究。曾發表《基于MFC的復合型仿生魚尾的振動性能》(《振動、測試與診斷》2013年第33卷增刊2)等論文。 E-mail:guanyuanlin201@163.com
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
建材發展導向(2021年14期)2021-08-23 00:56:16
紡織科技進展(2021年3期)2021-06-09 08:07:14
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
纖維復合材料(2018年3期)2018-04-25 07:22:58
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
電子測試(2017年11期)2017-12-15 08:57:13
應用化工(2014年10期)2014-08-16 13:11:29
