一種新型大推力直線壓電作動器*
2015-06-10 00:34:45朱鵬舉時運來趙淳生
振動、測試與診斷 2015年1期
朱鵬舉, 時運來, 趙淳生
(南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)
?
一種新型大推力直線壓電作動器*
朱鵬舉, 時運來, 趙淳生
(南京航空航天大學機械結構力學及控制國家重點實驗室 南京,210016)
設計了一種新型大推力直線壓電作動器,采用螺旋箝位的方式實現對壓電疊堆微小位移的累積輸出,實現了大推力和長行程。對該種作動器的驅動機理和作動器設計過程中的關鍵技術問題進行了詳細的分析,包括力矩電機的轉速設計、上下柔性聯軸器的扭轉剛度設計、螺母和絲杠之間相關機械參數的設計以及對所選壓電疊堆進行性能測試并選擇其最佳工作頻段。原理樣機長為140 mm,最大直徑為45 mm,重量為0.7 kg,行程為40 mm。在力矩電機轉速為300 r/min,壓電堆驅動頻率為100 Hz時,作動器的最大輸出力可達130 N。
壓電作動器; 絲杠; 尺蠖型; 大推力
引言
由于壓電材料具有優越的動態性能、高能量密度和增量式定位能力,所以目前世界多國重點研究使用壓電材料的作動器(壓電作動器)[1]。和傳統的電磁作動器相比,壓電作動器具有不需要繞組和磁路、不依靠電磁耦合來獲得動力、定位精度高、輸出力大和響應速度快等[2]優點。壓電作動器的種類繁多,對于應用于輸出直線或旋轉運動的壓電作動器,可以分為:壓電超聲電機、壓電微位移作動器、壓電慣性作動器和壓電尺蠖作動器[3]。目前,壓電超聲電機發展較為成熟,已成功運用到光學機器、汽車、航空航天和生物醫學工程等領域中[4]。壓電超聲電機具有低速大轉矩、結構緊湊、響應速度快、噪聲極低、斷電自鎖、不受磁場干擾、運動精確等優點[5]及耐低溫、可在真空中正常運行等特點,但壓電超聲電機由于其原理的限制導致輸出力較小。壓電微位移作動器的結構較為簡單緊湊,輸出力大,定位精度高,動態特性好,但工作行程較小[6]。壓電慣性作動器具有高分辨率、大行程的特點,但沒有箝位機構導致輸出力和輸出剛度較小,且定位精度低[7]。
尺蠖作動器是仿照自然界的尺蠖運動設計開發的,利用壓電元件的逆壓電效應推動箝位機構和驅動機構交替作用,使直線動子在直接箝位摩擦力作用下,輸出連續的精密位移[8]。尺蠖驅動的箝位方式分為3種:主動箝位型、被動箝位型和螺旋箝位型[9]。壓電尺蠖型作動器可以克服上述3種作動器的缺點,實現高分辨率、大行程、大推力和大功率密度的輸出[10]。另外,由于其原理簡單,可以根據需求設計出不同結構的壓電作動器。筆者利用螺旋箝位的方式,設計了一種新型大推力直線壓電作動器,對驅動機理和設計的關鍵技術問題進行了分析,制作出樣機并進行了試驗研究。
1 新型大推力壓電作動器的結構和工作原理
本研究開發的作動器箝位機構屬于螺旋箝位型,基本結構如圖1所示。該作動器主要由絲杠、承載螺母、力矩電機、柔性聯軸器、驅動螺母、壓電疊堆、滾珠花鍵和外殼組成。其中:壓電疊堆為驅動元件;絲杠為輸出元件;承載螺母、力矩電機和驅動螺母通過柔性聯軸器依次連接在一起,組成箝位機構。絲杠位于作動器的中心,穿過壓電疊堆、驅動螺母、聯軸器、力矩電機和承載螺母,并與兩螺母的內螺紋相配合。滾珠花鍵用于限制絲杠的轉動,保證絲杠只能沿軸向運動。在初始狀態,承載螺母鎖緊在承載面上,壓電疊堆上端蓋緊壓在驅動螺母下端面上。
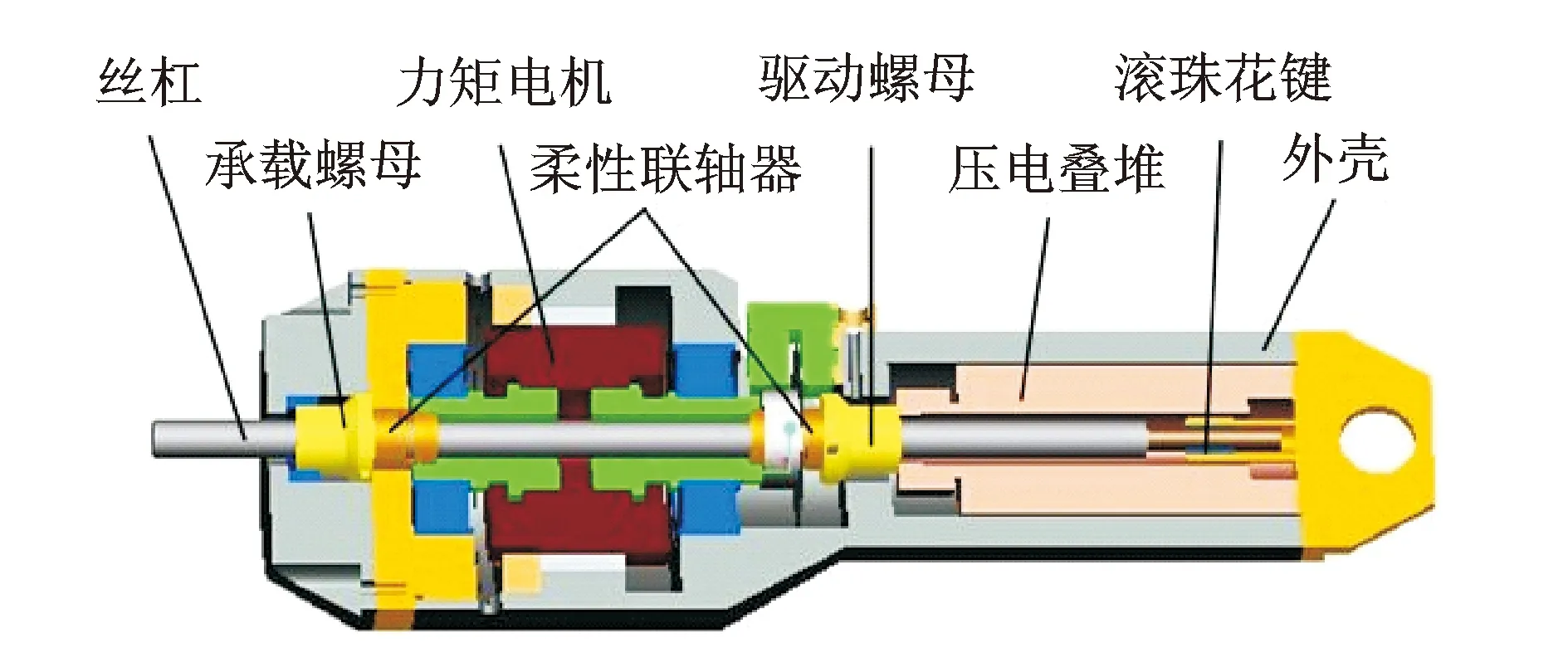
圖1 作動器基本結構示意圖Fig.1 Structure of the actuator
該作動器的工作原理如圖2~5所示。在圖3和圖5的承載螺母和驅動螺母運動狀態圖中,縱坐標“1”代表螺母處于正轉狀態,“-1”代表處于反轉狀態,“0”代表處于不轉動狀態。在圖3和圖5的壓電疊堆狀態圖中,上升部分表示壓電疊堆在伸長,下降部分表示壓電疊堆在收縮。該作動器正向運動原理如圖2,3所示,具體運動過程如下。
在t=0~T/4(狀態a~狀態b)時,同時施加壓電疊堆激勵信號和力矩電機起動信號后,壓電疊堆開始伸長,將驅動螺母向上頂,驅動螺母帶動絲杠向上運動。此過程中,絲杠帶動承載螺母向上運動,因此承載螺母不再承受負載壓力,開始在力矩電機的帶動下正向旋轉,產生向著承載面方向的軸向位移。因驅動螺母和壓電疊堆之間的壓力很大,所產生的摩擦力阻止了驅動螺母跟隨力矩電機旋轉。
在t=T/4~T/2(狀態b~狀態c)時,壓電疊堆繼續伸長到最大伸長位置處,繼續帶動絲杠向上運動。此過程中,承載螺母在力矩電機的帶動下繼續正向旋轉,直到旋回承載面,驅動螺母同樣因其和壓電疊堆之間的摩擦力而不跟隨力矩電機旋轉。
在t=T/2~3T/4(狀態c~狀態d)時,壓電疊堆開始收縮,此時承載螺母也已旋回到承載面上,由于絲杠承受的負載,使得承載螺母壓緊在承載面上,不再跟隨力矩電機旋轉,同時也鎖緊絲杠使其不跟隨壓電疊堆向下運動。驅動螺母因壓電疊堆的快速收縮而與其分離,由于柔性聯軸器的作用,驅動螺母在力矩電機的帶動下快速正向旋轉,產生向著壓電疊堆上端面方向的軸向位移。
在t=3T/4~T(狀態d~狀態e)時,壓電疊堆繼續收縮,回到初始位置。此過程中,驅動螺母在力矩電機的帶動下繼續正向旋轉,旋回到壓電疊堆上端面上,承載螺母仍因負載作用,壓緊在承載面上,繼續鎖緊絲杠使其不產生向下的運動。由此,從狀態a到狀態e,作動器正向運動了一步。如此往復,便實現了正向的持續動力輸出。
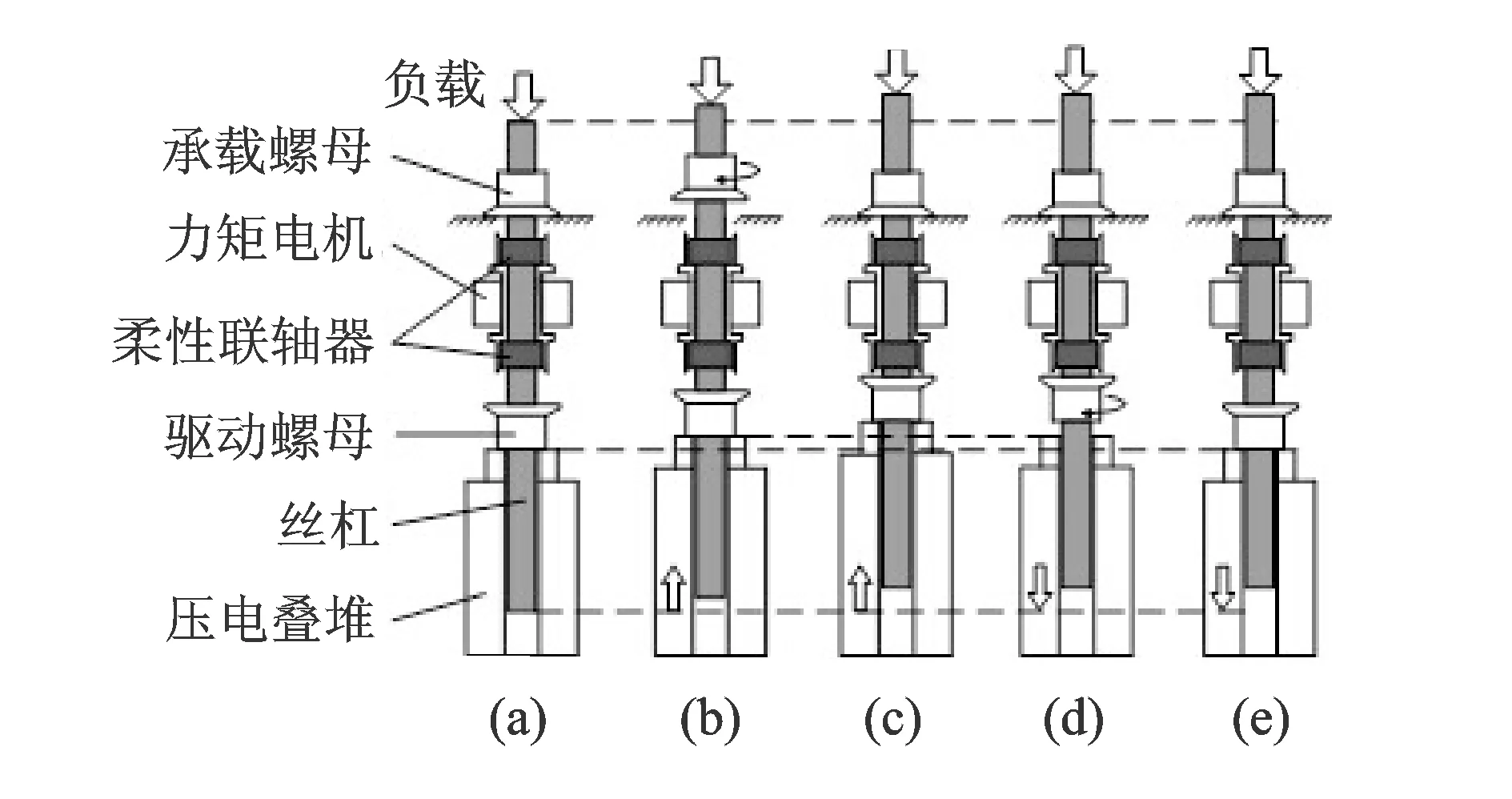
圖2 正向運動原理示意圖Fig.2 Operating principle of the actuator in forward

圖3 正向運動時序圖Fig.3 Sequence chart of the actuator in forward
該作動器的回程運動原理如圖4,5所示,具體的運動過程如下。
在t=0~t1(狀態a~狀態b)時,在初始狀態a,壓電疊堆處于自然狀態,承載螺母鎖緊在承載面上,限制絲杠向下運動。同時施加壓電疊堆激勵信號和力矩電機起動信號后,驅動螺母跟隨力矩電機反向旋轉,產生向上的軸向運動。轉動到一定角度后,同驅動螺母相連的柔性聯軸器達到最大扭矩,驅動螺母停止旋轉。承載螺母由于負載的作用,壓緊在承載面上,不隨力矩電機旋轉。壓電疊堆在0~T/2時間內伸長,在t1時刻,壓電疊堆上端面頂住驅動螺母下端面。此過程中,由于驅動螺母的反向旋轉產生了沿著絲桿向上的軸向位移,使得壓電疊堆在0~t1階段內伸長的位移沒有傳遞到絲杠上。
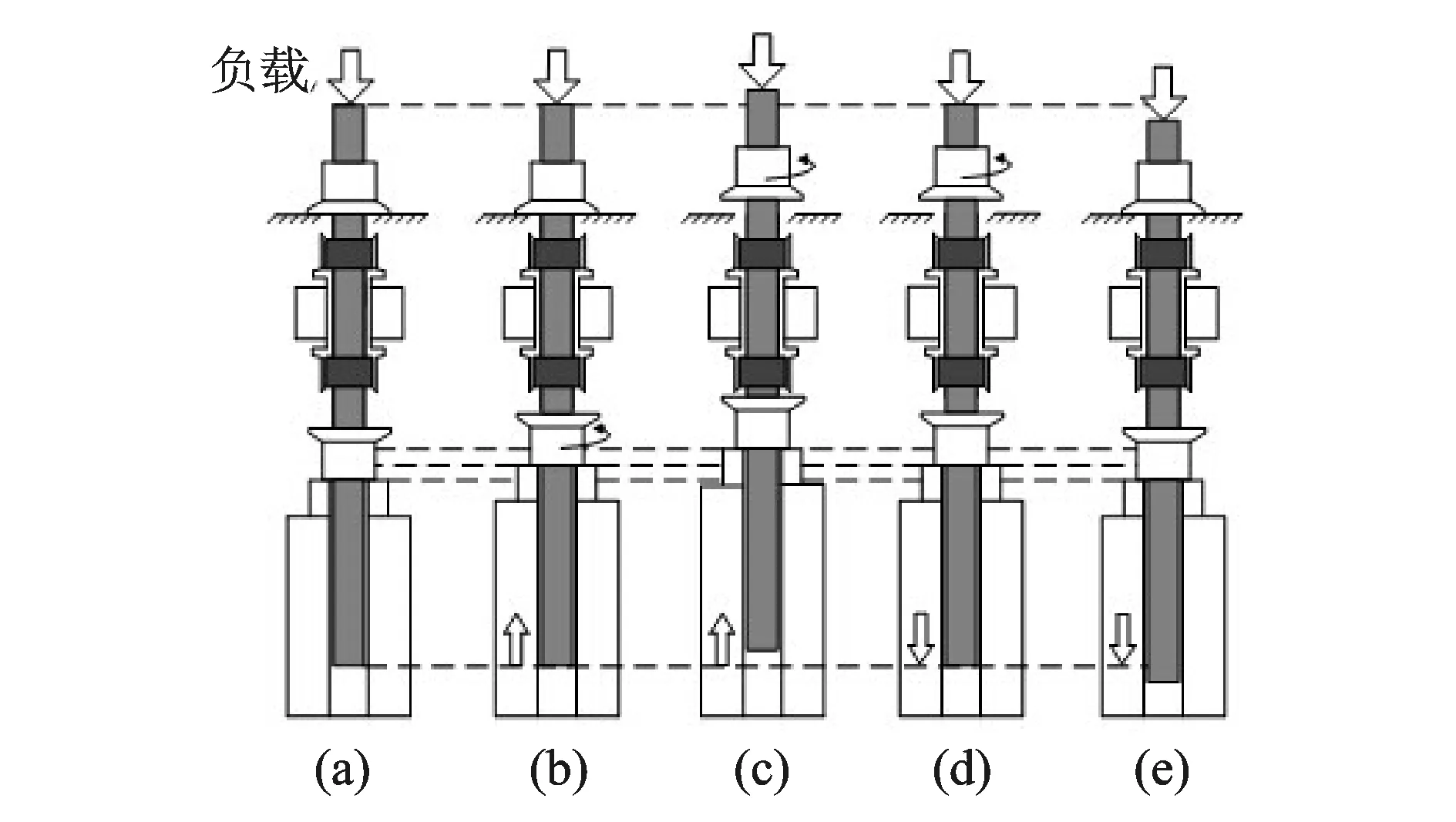
圖4 回程運動原理示意圖Fig.4 Operating principle of the actuator in backward

圖5 回程運動時序圖Fig.5 Sequence chart of the actuator in backward
在t=t1~T/2(狀態b~狀態c)時,在t1時刻,驅動螺母下端面和壓電疊堆上端面壓緊在一起。此后,壓電疊堆帶動驅動螺母向上運動,驅動螺母又帶動絲杠向上運動。此過程中,絲杠帶動承載螺母脫離承載面,承載螺母開始在力矩電機的帶動下反向旋轉,產生遠離承載面的軸向位移。
在t=T/2~3T/4(狀態c~狀態d)時,壓電疊堆開始收縮,在負載作用下,絲杠隨壓電疊堆的收縮向下運動,承載螺母繼續反向旋轉的同時跟隨絲杠向下運動,直至和承載螺母相連的柔性聯軸器達到最大扭矩。由于負載的作用,驅動螺母和壓電疊堆壓緊在一起,不隨力矩電機旋轉。
在t=3T/4~t2(狀態d~狀態e)時,承載螺母停止旋轉后跟隨絲杠向下運動,回落到承載面上。此過程中,驅動螺母因負載的作用,和壓電疊堆上端面壓緊在一起,仍不隨力矩電機旋轉,直至承載螺母落回到承載面鎖緊絲杠承受負載。由此,由于絲杠正向的位移小于反向的位移,作動器反向運動一步。如此往復,作動器實現了回程運動。
2 作動器關鍵技術問題分析及設計
2.1 力矩電機的選擇和轉速設計
2.1.1 力矩電機的選擇
力矩電機是作動器箝位機構的重要元件之一,用于通過柔性聯軸器向螺母傳遞扭矩,使得驅動螺母和承載螺母能夠在絲杠上交替旋轉,達到箝位的目的。在選擇力矩電機時,必須保證力矩足夠大,能夠快速的將螺母旋到指定位置。這里選擇的是國產的NH45LYX系列直流力矩電機,其力矩為0.44 N·m,驅動電壓為27~45 V,額定功率為151.2 W,最大外徑為45 mm,內徑為15 mm。對應的編碼器選用的是增量式光柵編碼器,用于力矩電機的速度控制。
2.1.2 力矩電機的轉速設計
由該作動器的驅動原理可知,整個作動器的性能和壓電疊堆、力矩電機、驅動螺母和承載螺母以及絲杠之間的匹配息息相關。在正向運動時,必須考慮到壓電疊堆的振動頻率和力矩電機的轉速匹配問題。由圖2中T/2-3T/4(狀態c-狀態d)的運動階段可知,壓電疊堆在開始收縮時,必須保證承載螺母已旋回承載面鎖緊絲杠來支撐負載,以防止絲杠在負載作用下隨壓電疊堆的收縮往回運動。由此,必須對作動器作動過程中各部件之間的匹配關系進行分析。設力矩作動器初始轉速為n1,壓電疊堆的作動頻率為f,振幅為Δδ,壓電疊堆伸長時產生的推力為Fs,作動器外加負載為P,絲杠螺距為b,絲杠和兩個螺母的總質量為Μ。在初始狀態,驅動螺母下端面和壓電疊堆的上端面壓緊在一起,故不需考慮螺母和絲杠之間的間隙。
正向運動時,設為絲杠在被正向推動時的加速度,應滿足
(1)
(2)
在壓電疊堆伸長的時間T/2內,絲杠前進的位移為

(3)
若s>Δδ,則絲杠在運動過程中,驅動螺母和壓電疊堆的上端面脫離,此情況不成立,則絲杠的行程為Δδ。
若要保證壓電疊堆伸長到最大伸長處,承載螺母已經旋回承載面,則需滿足承載螺母向下旋轉產生的軸向距離應不小于絲杠帶動其前進的距離。承載螺母在力矩電機的帶動下向下旋轉的過程中,速度由初始轉速n1降為0。假設當壓電疊堆伸長到最大伸長位置時,承載螺母恰好旋轉回承載面上并停止旋轉。由此,承載螺母的動能全部轉化為柔性聯軸器的勢能。假設與承載螺母相連的柔性聯軸器的扭轉剛度為K1,與驅動螺母相連的柔性聯軸器的扭轉剛度為K2,承載螺母的轉動角度為θ,力矩電機的初始角速度為w,系統的轉動慣量為I,則
(4)


(5)
承載螺母在T/2時間內旋轉產生的向下軸向距離s1為
(6)
s1應滿足s1≥Δδ,聯合式(6)解得

(7)
絲杠理論上的前進速度應為

(8)
若s≤Δδ,則絲杠在運動過程中始終和疊堆接觸,此情況成立時絲杠的行程為s,壓電疊堆的部分位移被柔性聯軸器吸收。若要保證壓電疊堆伸長時,承載螺母已旋回承載面,需滿足
s1≥s
(9)
由式(9)可得力矩電機的轉速應滿足

(10)
絲杠的理論前進速度為

(11)

同樣,回程運動時,在圖4中(a)~(b)階段時間為t1。在這個階段中,驅動螺母由初始轉速n1逐漸變為0,驅動螺母的動能全部轉化為和驅動螺母相連的柔性聯軸器的勢能。設驅動螺母轉動的角度為θ1,由能量之間的轉換可得
(12)

(13)
在這個階段驅動螺母旋轉產生的向上的軸向距離為

(14)
在t1時刻,壓電疊堆上端面頂住驅動螺母下端面,設壓電疊作動角頻率為ω′,則有
(15)
(16)
承載螺母在t1后脫離成承載面,開始轉動,直至和承載螺母相連的柔性聯軸器達到最大扭矩。設這期間承載螺母旋轉的角度為θ2,則有
(17)
聯合式(13)解得

(18)
若要保證壓電疊堆伸長時,承載螺母已經回落到承載面,需滿足承載螺母旋轉產生的軸向距離小于驅動螺母旋轉產生的軸向距離,即
θ2b<θ1b
(19)
聯合式(13),(18)解得

(20)
在滿足式(20)的條件下,壓電疊堆伸長時,承載螺母已經旋回承載面。故在選用兩柔性聯軸器時,需考慮其扭轉剛度的大小,滿足式(20)。另外,柔性聯軸器的軸向剛度不能過大,需可以吸收壓電疊堆的最大位移。由于疊堆最大位移在20 μm左右,柔性聯軸器一般都可以達到要求,故不需對其軸向剛度做特別要求。
另外,初始狀態壓電疊堆頂在驅動螺母上回程運動時,圖4(a)狀態,力矩電機開始帶動驅動螺母反向旋轉,需要克服壓電疊堆端蓋和驅動螺母之間的摩擦力。設驅動螺母和壓電疊堆端蓋之間的摩擦因數為μ,驅動螺母外徑為r1,內徑為r2,壓電疊堆與驅動螺母之間的預壓力為Fp,若要使力矩電機帶動驅動螺母旋轉,則力矩電機的轉矩M0與預壓力Fp之間需滿足
(21)
(22)
即壓電疊堆和驅動螺母之間的預壓力不能過大,需滿足式(22)。
2.2 螺母和絲杠的設計
螺母和絲杠之間構成了作動器的關鍵部分-箝位機構部分。螺母和絲杠之間相當于兩個楔形塊,絲杠上的螺紋可展開成一個斜面,如圖6所示[11]。圖中:FHC為被動偏轉力;PL為負載重量。
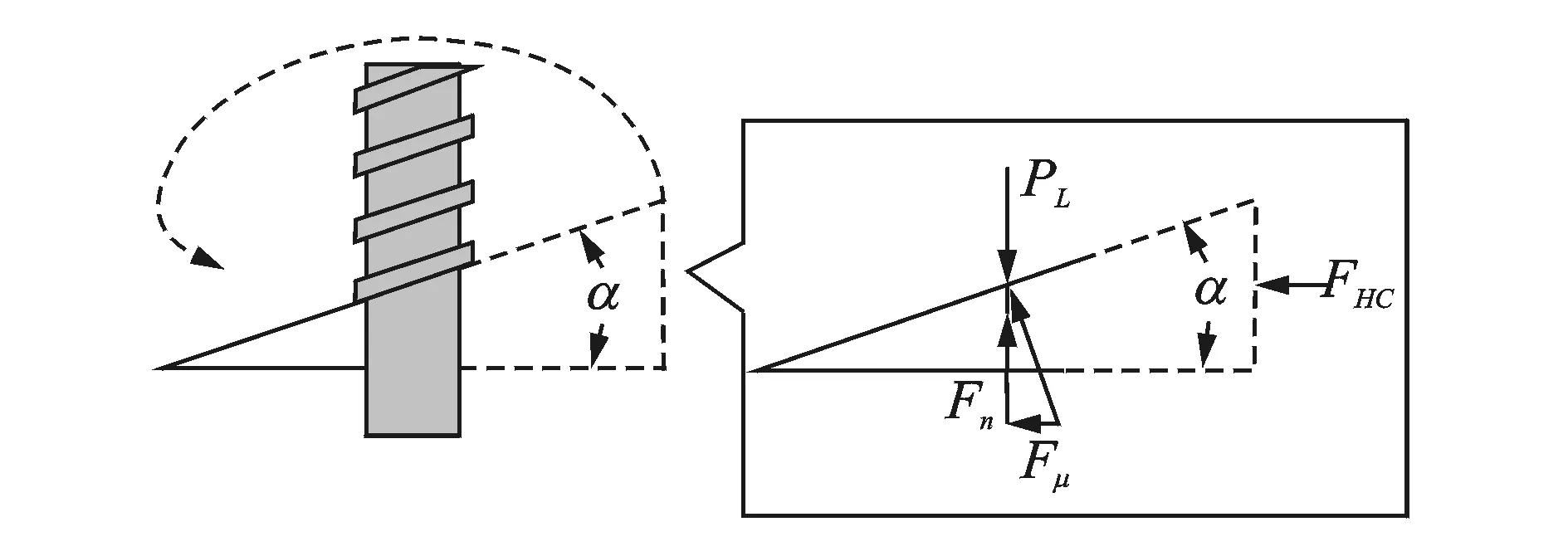
圖6 箝位結構示意圖Fig.6 Schematic of the clamp structure
不考慮慣性效應的條件下,若支持負載,須滿足以下條件
Fμ+FHC≥PLtanα
(23)
其中:Fμ=μcPL。
FHC≥PL(tanα-μc)
(24)
對于被動偏轉力是一個定值,要使式(24)始終成立,需滿足
α≥arctanμc
(25)
即在滿足式(25)的條件下,螺母和絲杠可以實現自鎖。實驗用絲杠和螺母材料均為不銹鋼304,摩擦因數μ為0.12,則
α≤arctanμc≈7°
(26)
設計時絲杠和螺母的螺旋面鍥角應小于7°。
2.3 壓電疊堆的選擇
壓電疊堆是作動器的驅動元件,壓電疊堆的選擇對作動器的性能非常關鍵。首先,必須是中空型壓電疊堆,內徑需大于絲杠的外徑;其次,要考慮到與力矩電機、驅動螺母的尺寸相匹配。這里選擇的是德國PI公司生產的低壓環形機械封裝式壓電陶瓷,型號為HPSt 150/14-10/25 VS22,如圖7所示。該壓電疊堆外徑為22 mm,內徑為7.5 mm,長為52 mm。工作電壓為0~150 V,最大行程為32 μm,最大承受負載為6 kN,最大推力為4.5 kN。其電壓、頻率和振幅之間的關系如圖8所示。

圖7 實驗所用壓電疊堆Fig.7 Piezoelectric stack used in the experiment
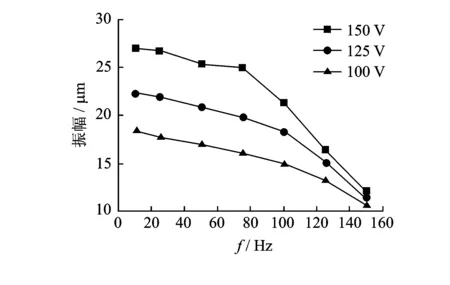
圖8 頻率-振幅曲線圖Fig.8 Operating frequency vs amplitude of the piezoelectric stack
3 實驗研究
3.1 實驗系統組成
圖9為作動器外殼與內部結構實物圖。整個作動器長為140 mm,最大外徑為45 mm,重量為0.7 kg,最大行程為40 mm。

圖9 作動器結構實物圖Fig.9 Prototype of the actuator
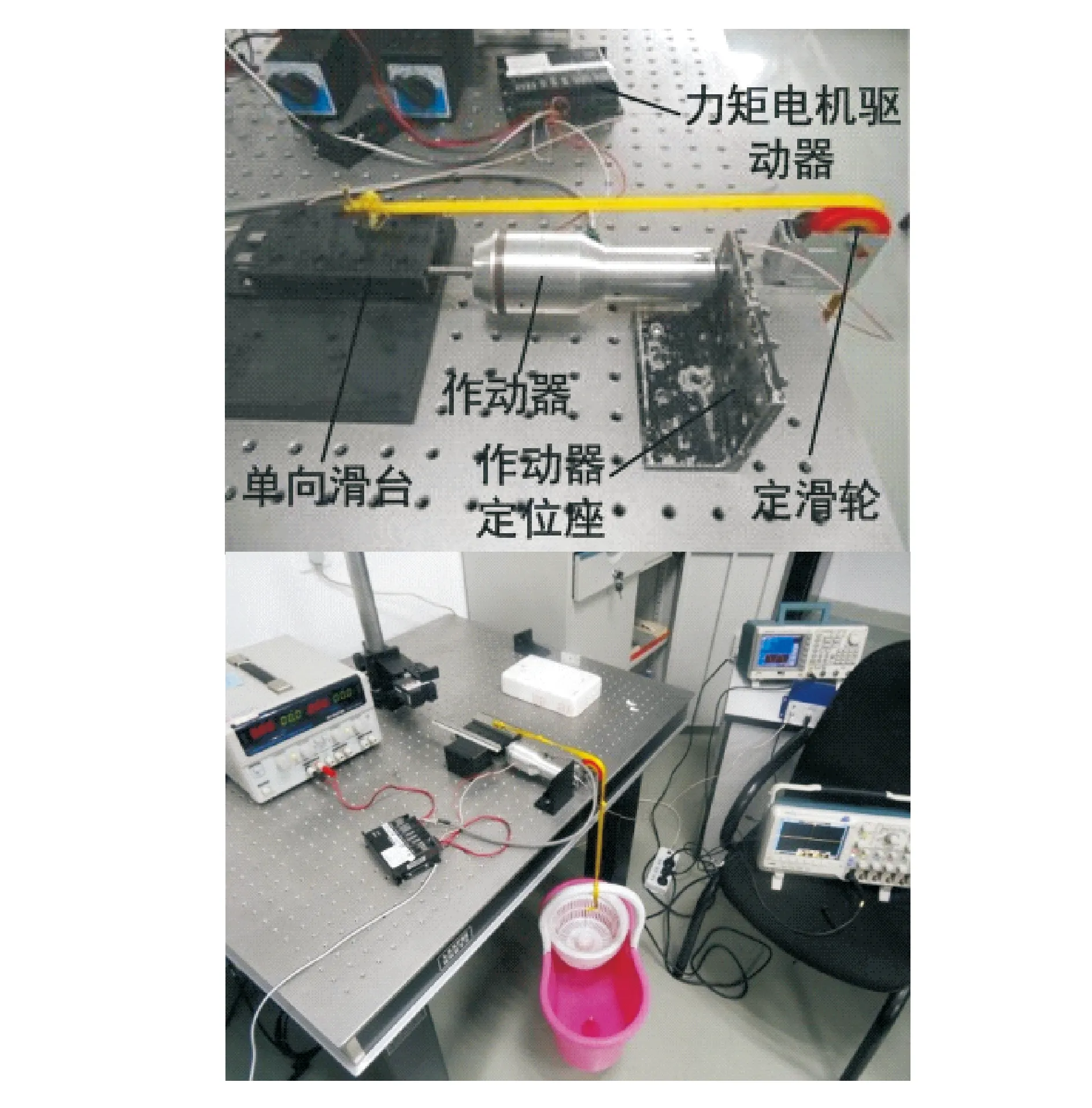
圖10 測試裝置Fig.10 Testing devices
圖10為作動器性能測試裝置。為了方便改變負載大小,將水桶的重量通過一個定滑輪和單向運動平臺傳遞到作動器的輸出軸絲杠上,通過改變水桶中的水量來改變負載的大小。
3.2 實驗結果分析
圖11為壓電疊堆激勵頻率分別為75, 100,125 Hz下的作動器速度和負載關系圖。可以看出,作動器的速度基本隨負載的增大線性變小。在壓電疊堆激勵頻率為100 Hz、力矩電機的轉速為300 r/min時,作動器輸出推力可達130 N。在負載低于30 N時,作動器的速度變化較平緩,這主要是由于在這種負載下,力矩電機的轉速對作動器的速度影響較大。因為在負載較小的情況,壓電疊堆即使不作動,力矩電機就可以驅動負載。
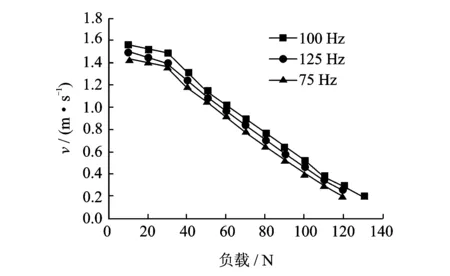
圖11 不同壓電疊堆驅動頻率下的速度-負載曲線Fig.11 Speed vs load of the actuator with different driving frequency of the piezoelectric stack
對該作動器測試時,施加的壓電疊堆激勵頻范圍為50~125 Hz,每種頻率下對應的最大功率如圖12所示。可見,壓電疊堆頻率為100 Hz時,作動器能達到最大功率,這是壓電疊堆的驅動頻率和響應幅值共同作用的結果。
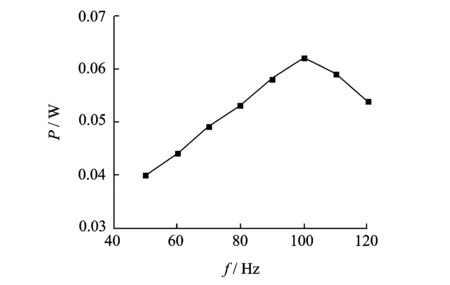
圖12 頻率-功率曲線圖Fig.12 Frequency vs power of the actuator
由回程原理可知,絲杠必須在有負載情況下才能實現回程。回程時由于力矩電機驅動器限流,回程時力矩電機轉子所受阻力變大,電流過流導致力矩電機驅動器自動關閉,所以只測試了負載為40 N以下時的作動器性能。在壓電疊堆頻率為100 Hz時,所測作動器回程性能如圖13所示。
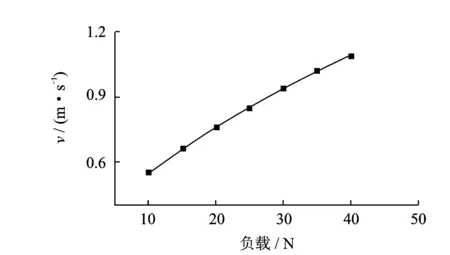
圖13 速度-負載曲線圖Fig.13 Speed vs load of the actuator
4 結束語
[1] 張兆成,胡泓. 新型壓電尺蠖精密驅動器柔性機構分析與實驗研究[D].哈爾濱:哈爾濱工業大學,2010.
[2] 陳西府,黃衛清,王寅. 動摩擦型壓電疊堆直線電機定子的振動特性[J].振動、測試與診斷,2014,34(5):960-966.
Chen Xifu,Huang Weiqing,Wang Yin. Vibration characteristics of the stator of dynamic friction type linear piezoelectric stack motors[J]. Journal of Vibration,Measurement & Diagnosis,2014,34(5):960-966. (in Chinese)
[3] 趙宏偉,吳博達,程光明,等. 尺鑊型壓電驅動器基礎理論與試驗研究[D].長春:吉林大學,2006.
[4] 趙淳生. 超聲電機技術與應用[M].北京:科學出版社,2007:14-19.
[5] 趙淳生. 21世紀超聲電機發展與展望[J].振動、測試與診斷,2000,20(1):7-12.
Zhao Chunsheng. Development and prospect of the ultrosonic motor in 21 century[J]. Journal of Vibration,Measurement & Diagnosis,2000,20(1):7-12. (in Chinese)
[6] 吳博達,張志宇,楊旭,等. 壓電微位移精密驅動器的設計研究[J].機械工程師,2007(2):44-46.
Wu Boda,Zhang Zhiyu,Yang Xu,et al. The design research on the piezoelectric Actuators for precisionmicro-displacement[J]. Mechanical Engineer,2007(2):44-46. (in Chinese)
[7] Loverich J J. Development of a new high specific power actuator[D]. USA:Pennsylvania State University,2004.
[8] 馬立,周莎莎,王坤.行走式尺蠖壓電直線作動器研究現狀及關鍵技術綜述[J].微電機,2012,45(7):82-85.
Ma Li,Zhou Shasha,Wang Kun. State-of-the-art and key technologies in piezoelectric linear actuator of walker inchworm[J]. Micromotors, 2012, 45 (7): 82-85. (in Chinese)
[9] 張兆成,胡泓.離合器箝位型尺蠖驅動器研究及發展[J]. 微電機,2009,42(7):61-64.
Zhang Zhaocheng,Hu Hong. Research progress of inchworm actuator with clutch clamping mechanism[J]. Micromotors,2012,42(7):61-64. (in Chinese)
[10]Ma Li,Jiang Chenyang,Xiao Jintao,et al. Design and analysis of a piezoelectric inchworm actuator[J]. Journal of Micro-Bio Robotics, 2014, 9(1-2):11-21.
[11]劉榮清,秋黎鳳. 自鎖螺母的原理及應用[J].紡織器材,2008,35(6):256-258.
Liu Rongqing,Qiu Lifeng. Mechanism of locknuts and the application[J]. Textile Accessories, 2008,35(6):256-258. (in Chinese)

*國家自然科學基金面上資助項目(51275235,51275242);中央高校基本科研業務費專項資金資助項目(NJ20130004)
2014-10-14;
2014-12-03
10.16450/j.cnki.issn.1004-6801.2015.01.028
TM356; TB318; TH703.6
朱鵬舉,男,1989年11月生,碩士研究生。主要研究方向為新型大推力壓電作動器。 E-mail:pj-zhu0516@163.com 通信作者簡介:時運來,男,1976年10月生,副教授、碩士生導師。主要研究為壓電作動技術及其應用。 E-mail:shiyunlai950438@nuaa.edu.cn
