帶擾動離散非線性系統的小波自適應滑模控制
2015-06-15 19:00:49張曉宇陳文卓
自動化儀表 2015年5期
張曉宇 陳文卓
(華北科技學院電子信息工程學院,北京 101601)
帶擾動離散非線性系統的小波自適應滑模控制
張曉宇 陳文卓
(華北科技學院電子信息工程學院,北京 101601)
在實際控制系統中,非線性、未建模動態和外擾經常是不可估計或無法測量的。采用小波網絡(WN)設計動態未知的離散非線性系統智能自適應滑模控制(ASMC),應用WN構造滑模控制律的等價控制,使用合適的自適應律在線調節網絡參數。系統的滑模能夠保證在有限時間到達切換帶,所得到的閉環系統是漸近穩定的。通過擾動分析表明,所設計的控制器具有較強的魯棒性。基于倒立擺試驗系統的仿真及應用研究證明了其可行性和有效性。
離散非線性系統 多變量系統 小波網絡 滑模控制 自適應
0 引言
滑模控制是非線性系統常用的綜合方法之一[1-2]。然而,當系統非線性動態未知時,滑模控制設計就非常困難。此時,基于小波網絡等價控制逼近就成為較好的辨識工具之一[3-5]。然而許多小波網絡的應用研究都是離線辨識或訓練[6-8]。對于控制系統來說,需要能夠實現在線辨識和逼近,或獲得在線自適應逼近器[9-12],小波網絡(wavelet network,WN)完全能夠勝任。許多學者基于小波網絡進行自適應滑模控制研究[13-26],如Wai R J 針對電機控制問題的研究[13-15],Xu J X 對非線性系統的自適應滑模控制研究[16-17],王家軍結合反推方法的感應電機控制研究[18],李毓洲、潘勁等針對電機控制的研究[19-20]以及其他諸多研究[21-25]。然而這些工作都是針對連續系統,且都沒有考慮非仿射非線性系統。
本文考慮將自適應小波網絡及滑模控制推廣至一類帶外部擾動的離散非仿射非線性系統。這樣代表更廣泛的實際工業過程或被控對象,便于計算機實現。當對象模型動態未知時,利用小波網絡逼近等價控制,實現滑模控制綜合,削弱滑模控制抖振,同時滑模控制對匹配不確定性和干擾的魯棒性仍然得以保存。
1 問題描述
考慮如下一類離散多變量非仿射非線性系統:
(1)

非線性動態f(xk,uk)=[f1(xk,u1,k),f2(xk,u1,k),…,fm(xk,u1,k)]構成系統動態函數向量。這里fi(xk,ui,k)∈L2(R),i=1,2,…,m都是未知的。d(xk,k)=[d1(xk,k),d2(xk,k),… ,dm(xk,k)]T是系統未知的有界干擾,這里di(xk,k)∈R, 干擾上界描述為:
|di(xk,k)|≤DiDi≥0i=1,2,…,m

(2)
漸近收斂到原點,這里:
定義滑模面如下:
Sk=[S1,k,S2,k,…,Sm,k]T
(3)
式中:Si,k=Ciei,i=1,2,…,m,Ci=[ci,1,ci,2,…, ci,ri-1,1]T滿足Hurwitz多項式。
hi(ei,k)=ei,k+ri-1+ci,ri-1ei,k+ri-2+…+ci,1ei,k
(4)
控制問題是尋找SMC控制:
ui,k=ueq,i+uv,ii=1,2,…,m
(5)
這里ueq,i是等價控制, uv,i是保證滑模面Sk可以到達并保持的到達控制率。到達條件可以選擇為Lyapunov型:
(6)
式中:ΔSi,k=Si,k+1-Si,k為子滑模Si,k的前向差分。式(6)也可以寫成求和式:
(7)
到達條件(6)將會使滑模面漸近收斂到原點。因為非線性動態 fi(xk,ui,k) 是未知的,控制輸入uk不能直接設計。接下來,將采用一個自適應小波網絡來實現這個SMC控制器。
后面的設計中,將基于如下假設。

對于所有xk∈Ωxk光滑函數滿足fi,ui>0或fi,ui<0。不失一般性,假設fi,ui>0。
假設2 存在正標量ζi,1、ζi,2及 ζi,3使得?x∈Ωx、ζi,1≤fi,ui≤ζi,2和Δfi,ui≤ζi,3成立。
根據隱函數定理,下列引理被引入。
引理2 對于式(1),存在一個子集Ωx,0∈Ωxk及獨立局部解ui,k=ui(xk,vi),使得fi(xk,ui,k)+ vi=0對于?x(0)∈Ωx,0,i=1,2,…,m都成立。其中vi=vi(x)是xk的任意光滑函數。
2 小波網絡
小波網絡是建立在多分辨分析(multi-resolutionanalysis,MRA)基礎之上的一種函數逼近方法。許多關于MRA的理論可以參考文獻[3]~[5]和文獻[8]。
這里ef,j是分辨率j的估計誤差。隨著j→,lim|ef,j|=0。在分辨率(j+1), f(x)的逼近在空間Wj上有投影,被稱為“細節”。
顯然,|ef,j|>|ef,j+1|>…,隨著j→,越來越多的細節被加入到f(x)估計中去。因此對于給定J,f(x) 在空間VJ上的投影被稱作“粗糙”估計。隨著分辨率j的增加,細節估計累積起來。自然地,存在一個“母小波”k∈Z,可以構成空間Wj的規范基。與尺度函數類似,小波函數ψj,k也滿足:
則L2(R)中,?f(x)自然可以寫成:

(8)
式(8)是L2(R)空間上函數f(x)基于尺度基序列和小波基序列的估計。在實際應用中,函數估計是在有限維空間進行的,因此式(8)只存在理論上的意義,是不能應用的。由文獻[8]引入如下定理。

(9)
這就意味著總存在一個以小波基序列形式的函數最優估計:

由此,當J≤-M時,估計:

實際應用中還有一個問題是,控制系統往往是多維的。系統狀態變量x是一個向量而不是單變量。尺度函數基及小波基必須擴展為如下多維形式:

這樣f(x)估計變為:
(10)
這里:
Υ=[υJ,-N,υJ,-N+1,…,υN]T
(11)
Γj=[γj,-N,γj,-N+1,…,γj,N]T
(12)
ΦJ=[φJ,-N(x),φJ,-N+1(x),…,φJ,N(x)]T
(13)
Ψj=[ψj,-N(x),ψj,-N+1(x),…,ψj,N(x)]T
(14)
上述表明,L2(R)空間上任意函數f(x)都有一個基于尺度基和小波基的最優估計f*(x)。
3 基于自適應WN的SMC
現在尋找滑模(2)、(3)的子滑模Si,k(由于對稱性,在下文中我們只考慮子滑模Si,k)的差分:
如果定義:
那么:
ΔSi,k=vi+fi(xk,ui,k)+di(xk,k)
(15)
控制目標是設計一個滑模控制ui,k使 Si,k=0。由式(5)描述的滑模控制由兩部分組成:等價控制ueq,i和到達控制uv,i。因為系統的非線性動態都是未知的,采用上節描述的基于小波網絡的函數逼近方法來估計等價控制。我們首先來設計等價控制ueq,i的估計。
3.1 等價控制設計
系統動態函數 fi(xk,ui,k) 滿足假設1和2。根據引理1,當外部干擾 di(xk,k)不被考慮時,存在等價控制 ueq,i(xk,vi) 使 Si,k=0,即式(15)變為:
ΔSi,k=vi+fi(xk,ueq,i)=0
(16)
因fi(xk,ui,k)∈L2(R),等價控制 ueq,i(xk,vi) 也位于L2(R)內。
根據定理1及式(10),存在 ueq,i(xk,vi) 的最優估計如下:

Ψj(xk,vi)=[ψj,-N(xk,vi),…,ψj,N(xk,vi)]T
ΦJ(xk,vi)=[φJ,-N(xk,vi),…,φJ,N(xk,vi)]T

(17)
這里Υi及Γi,j為小波基系數,需要用自適應率:
(18)

然而,即使是最優逼近在實際系統中也存在著一些誤差:
這樣再考慮式(16),則有:
(19)
由上式可見,估計誤差使Si,k趨向ΔSi,k≠0,必須有到達控制 uv,i才使到達條件(6)得到滿足。
3.2 到達控制設計
單憑等價控制不能保證滑模面的到達,這在滑模控制的一般原理中也是如此。單純的等價控制就不能構成滑模控制系統,也失去了其魯棒性能。因此到達控制項是必需的。依據滑模控制的基本理論[1-2],我們可以設計到達控制項uv,i為:
uv,i=-kiSi,k-ηisgn[Si,k]
(20)
這里參數ki和ηi分別滿足:

(21)
相應地,滑模Si,k的前向差分(19)可以寫為:
(22)
3.3 穩定性分析
主要結果概括為如下定理2。
定理2 基于假設1~3,系統(1)在小波自適應滑模控制(AWSMC)(17)、(20)、(22)及自適應律(18)作用下,滑模Si,k能夠到達如下切換帶:
(23)
這里:
(24)
證明 選擇Si,k的Lyapunov函數為:

將自適應律(18)代入上式,有
(25)
接著考慮以下兩種情況。
① 如果Si,k>φi,則根據式(24)和假設3,下式成立:
那么有:
即:
因此ΔVi,k≤0。
② 如果Si,k<-φi,則根據式(24)和假設3,下式成立:
那么同樣有:
即:
因此ΔVi,k≤0。
3.4 外擾分析
現在考慮外擾di(xk,k),將其寫為:
di(xk,k)=di,um(xk,k)+fi,ukdi,ma(xk,k)
式中:di,um(xk,k)為不匹配干擾;di,ma(xk,k)為匹配干擾。二者都上界,分別是:
有界干擾代入式(15)、式(16),然后式(19)變為:
為了補償匹配干擾,只需要在到達控制(20)中,使:
(26)
后續并不影響定理2的證明。這充分表明了滑模控制對匹配干擾的完全補償特性。

(27)
則定理2證明過程仍然有效。
滑模控制有一個重要的問題是抖振。這個問題已經被許多學者所研究[27-29], 這其中的許多結果都可以被應用。例如,可采用文獻[27]的到達控制項:
uv,i=-kiSi-ηisat(Si)
(28)
這里sat(x)是飽和函數。
(29)
式中:Δ>0是可選的正標量,即邊界層厚度。
4 應用仿真
考慮一階倒立擺的控制問題,設其精確非線性動態是未知的。本文提出的AWSMC控制設計不需要系統精確數學模型,因而只考慮其粗略離散模型。
x1,k+1=x2,k,x2,k+1=f(xk,uk)
這里xk=[x1,k,x2,k]T=[θk,θk+1]T為系統狀態,uk為小車電機的控制電壓,θk為擺角位移。
然后,估計其未知動態邊界為:
20≤fui,k≤30,Δfui,k≤200
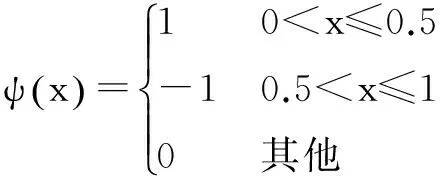
滑模選為Sk=[c,1]xk,其中c>0。選取最簡單的Haar小波,即:
(30)
相應的尺度基函數為:

(31)
首先我們基于原點線性化,做了一般SMC控制試驗,極點配置在-10.91±7.22i處,得到擺角位移曲線如圖1虛線所示,相應小車控制電壓曲線如圖2虛線所示。

圖1 擺角位移曲線圖
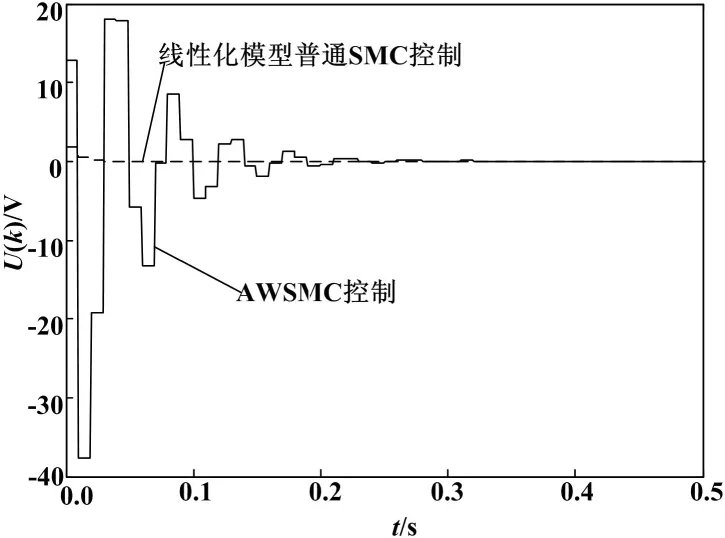
圖2 控制電壓曲線圖
接著我們驗證AWSMC 的抗外擾能力。用幅值0.3 rad、寬度0.2 s的脈沖外擾施加到擺角。為抵抗外擾,把控制器到達控制項參數η改為0.5,AWSMC仍然能夠使系統穩定,擺角位移如圖3所示,相應控制電壓如圖4所示。抗擾性能得到了驗證。

圖3 AWSMC控制受擾下擺角位移曲線
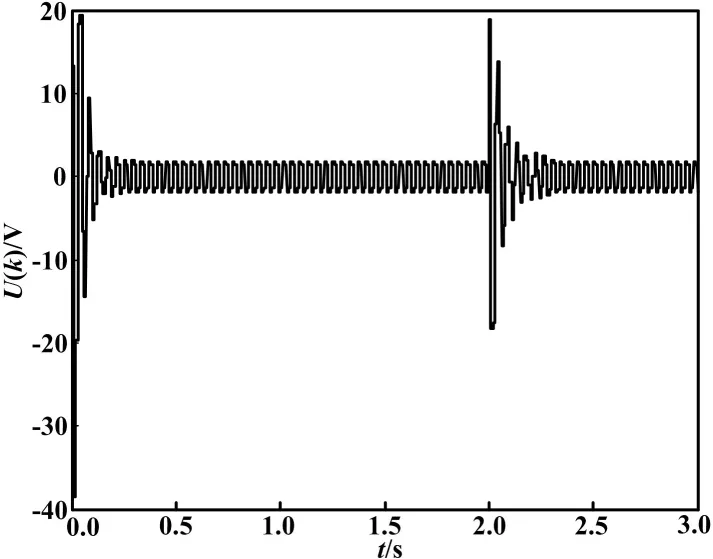
圖4 AWSMC控制受擾下控制電壓曲線
5 結束語
對于一類MIMO帶擾動的離散非仿射非線性系統,提出了基于小波網絡的自適應滑模控制設計。在系統非線性動態函數未知的情況下,系統的等價控制律用小波網絡進行逼近,通過合適的小波網絡權參數自適應律保證逼近效果,增加到達控制項保證滑模切換帶到達。通過Lyapunov 方法證明了滑模能夠漸近到達一個切換帶,切換帶寬度取決于系統不確定性、外擾的大小。基于倒立擺的仿真研究證明了所提出方法的有效性。
[1] Edwards C,Spurgeon S K.Sliding mode control:theory and applications[M].London,UK:Taylor & Francis,1998.
[2] Slotine J J E,Li W.Applied nonlinear control[M].New Jersey:Prentice-Hall,1991.
[3] Zhang Q,Benvensite A. Wavelet network[J].IEEE Transactions on Neural Networks,1992,3(6):889-898.
[4] Zhang J.Wavelet neural networks for function learning[J].IEEE Transactions on Signal Processing,1995,43(6):1485-1495.
[5] Pati Y C,Krishnaprasad P S.Analysis and synthesis of feedforward neural networks using discrete affine wavelet transformations[J].IEEE Transactions on Neural Network,1993,4(1):73-85.
[6] Zhang Q.Using wavelet network in nonparametric estimation[J].IEEE Transactions on Neural Network,1997,8(2):227-236.
[7] Sureshbabu N,Farrell J A.Wavelet-based system identification for nonlinear control[J]. IEEE Transactions on Automation Conrtol,1999,44(2):412-417.
[8] Delyon B,Juditsky A,Benveniste A.Accuracy analysis for wavelet approximations[J].IEEE Transactions on Neural Network,1995,6(2):332-348.
[9] Sanner R M,Slotine J J E.Gaussian network for direct adaptive control[J].IEEE Transactions on Neural Network,1992,3(6):837-863.
[10]Polycarpou M M,Mears M J.Stable adaptive tracking of uncertain systems using nonlinearly parameterized on-line approximators[J].International Journal of Control,1998,64(2):363-384.
[11]Farrell J A.On performance evaluation in on-line approximation for control[J].IEEE Transactions on Neural Network,1998,9(5):1001-1007.
[12]Sanner R M,Slotine J J E.Structurally dynamic wavelet networks for adaptive control of robotic systems[J].International Journal of Control,1998,70(3):405-421.
[13]Wai R J.Robust control for nonlinear motor mechanism coupling system using wavelet neural network[J].IEEE Transactions on Systems Man and Cyber.Part:B,2003,33(3):489-497.
[14]Wai R J.Wavelet neural network control for induction motor drive using sliding mode technique[J].IEEE Transactions on Industrial Electronics,2003,50(4):733-748.
[15]Wai R J,Chang J M.Implemetation of robust wavelet neural network sliding mode control for inductive servo motor drive[J].IEEE Transactions on Industr.Electr.,2003,50(6):1317-1334.
[16]Xu J X,Tan Y.Nonlinear adaptive wavelet control using constructive wavelet networks[J].IEEE Transactions on Neural Networks,2007,18(1):115-127.
[17]Xu J X,Tan Y.Nonlinear adaptive wavelet control using constructive wavelet networks[C]//Proceedings of the American Control Conference.Arlington,VA:IEEE Press,2001:624-629.
[18]王家軍.基于自回歸小波神經網絡的感應電動機滑模反推控制[J].自動化學報,2009,35(1):1-8.
[19]李毓洲,陽林.基于小波神經網絡的永磁同步電機無速度傳感器滑模控制[J].電機與控制應用,2010,37(3):31-34.
[20]潘勁,焦曉雷,危韌勇.無位置傳感器無刷直流電機全局滑模控制研究[J].機電工程技術,2012,41(9):23-26+96.
[21]周芳,朱齊丹,姜邁,等.受限機械臂的自適應小波滑模位置/力混合控制[J].華中科技大學學報:自然科學版,2009,37(11):9-12.
[22]徐傳忠,王永初,楊冠魯.一種小波提升算法的多關節機器人滑模控制[J].揚州大學學報:自然科學版,2010,13(3):61-64.
[23]王志,吳紅芳.基于小波神經網絡補償的飛艇滑模控制[J].西安工業大學學報,2011,31(5):465-469.
[24]胡慶雷,肖冰,馬廣富.輸入受限的航天器姿態調節小波滑模反步控制[J].哈爾濱工業大學學報,2010,42(5):678-682.
[25]Zhang Xizheng,Wang Yaonan.Wavelet neural network based robust sliding-mode control for induction motor[J].Journal of Information & Computational Science,2011,8(7):1209-1216.
[26]Mallat S.Multiresolution approximation and wavelet orthonormal base of L2[J].IEEE Transactions AMS,1989,31(5):69-87.
[27]Slotine J J E,Sastry S S.Tracking control of nonlinear system using sliding surfaces with application to robot manipulators[J].International Journal of Control,1983,38(2):465-492.
[28]Chang F J,Twu S H and Chang S.Adaptive chattering alleviation of variable structure systems control[J].IEE Proceeding-D Control Theory and Applications,1990,137(1):31-38.
[29]Bartolini G.On multi-input chattering-free econd-order sliding mode control[J].IEEE Transactions on Automatic Control,2000,45(9):1711-1717.
Wavelet Adaptive Sliding Mode Control for Discrete Nonlinear Systems with Disturbances
In practical control systems, unusually, the non-linearity, the unmodeled dynamics, and external disturbances are immeasurable and cannot be estimated. Thus the intelligent adaptive sliding mode control (ASMC) based on wavelet network (WN) has been designed for dynamic unknown discrete nonlinear system. The equivalent control of SMC is constructed by WN, the network parameters are tuned online by appropriate adaptive laws. The sliding mode of the system can reach the switching zone in limited time; the closed loop system obtained is asymptotically stable. The disturbance analysis indicates that the controller designed still possesses stronger robustness. The simulation based on experimental system of the inverted pendulum and application research verify its feasibility and effectiveness.
Discrete nonlinear system Multiple variable system Wavelet network Sliding mode control Adaptive
國家自然科學基金青年科學基金資助項目(編號:61304024);
河北省自然科學基金青年科學基金資助項目(編號:F2013508110);
中央高校基本科研業務費基金資助項目(編號:3142013055);
河北省教育廳科技計劃基金資助項目(編號:Z2012089)。
張曉宇(1978-),男,2006年畢業于浙江大學控制科學與工程專業,獲博士學位,副教授;主要從事非線性控制、智能控制、復雜系統控制與應用的研究。
TP273
A
10.16086/j.cnki.issn1000-0380.201505001
修改稿收到日期:2014-09-23。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
