掃描軌跡下的分段迭代補償策略
2015-06-15 19:01:22范文超陳興林張廣瑩
自動化儀表 2015年5期
關鍵詞:系統(tǒng)
魏 凱 范文超 陳興林 張廣瑩
(哈爾濱工業(yè)大學航天學院,黑龍江 哈爾濱 150001)
掃描軌跡下的分段迭代補償策略
魏 凱 范文超 陳興林 張廣瑩
(哈爾濱工業(yè)大學航天學院,黑龍江 哈爾濱 150001)
為提高光刻機掩模臺系統(tǒng)的步進掃描品質,進而提高硅片成品質量,提出一種基于S曲線的軌跡規(guī)劃。對迭代學習控制進行了研究,并針對普通全局迭代算法可能造成系統(tǒng)在特定環(huán)節(jié)惡化的局限性,采用分段迭代補償策略,對迭代學習控制器進行分段優(yōu)化。仿真表明,分段迭代學習控制滿足系統(tǒng)的實際需求,可以應用在掩模臺系統(tǒng)的調試中。
光刻機 掩模臺 步進掃描 S曲線 分段迭代學習控制
0 引言
在對硅片的處理過程中,光刻機掩模臺系統(tǒng)主要采用步進掃描的方式進行運動。其運動的品質與成品的質量息息相關,而步進的速度又決定了系統(tǒng)的產率。除了系統(tǒng)本身的高性能之外,軌跡規(guī)劃也起到不容忽視的作用。合理的軌跡規(guī)劃不僅能減小系統(tǒng)運動過程中的機械沖擊,還能使系統(tǒng)的運動軌跡更加平滑[1-2]。而對于迭代學習控制而言,單純的在光刻機的運動軌跡中使用迭代學習確實能起到一定的作用,但有時卻事與愿違。文獻[3]中直接采用了全時段的非因果迭代學習控制率,出現(xiàn)了曝光階段性能無法提高甚至部分惡化的現(xiàn)象。這是由于其忽略了掃描光刻系統(tǒng)的工作特點,全時段的迭代有時會由于動態(tài)過程而犧牲系統(tǒng)穩(wěn)態(tài)過程性能[4-6]。本文從光刻機掩模臺工作軌跡的特點入手,將原有的迭代學習控制進行分段,期望獲得更好的控制效果。
本課題來源于國家科技部“十二五”重大科技發(fā)展專項“極大規(guī)模集成電路制造裝備與成套工藝專項”的子課題“掃描步進式光刻機雙工件臺控制系統(tǒng)研制”。
1 掃描光刻系統(tǒng)軌跡規(guī)劃
在步進掃描的過程中,硅片臺在一個曝光域的曝光完成后,要步進到下一個曝光區(qū)域,重復掃描曝光的過程。300 mm的標準晶圓上通常分布著80~100塊曝光小塊(Die),曝光小塊的大小與曝光狹縫和掃描的長度有關,而曝光狹縫的大小又取決于投影物鏡的視場。掃描的過程伴隨著動態(tài)曝光的過程,從一個曝光小塊步進到另一個曝光小塊的過程稱為Die-to-Die的運動過程[7]。
Die-to-Die的過程包含y軸方向的掃描運動和x軸方向的步進運動。對于掩模臺的宏動部分而言,由于不存在x軸方向的自由度,因此只需討論y軸方向的掃描運動。在臺體一個軌跡周期的往復運動過程中,為減小硅片臺在加減速過程中對系統(tǒng)框架的沖擊,實際工程中普遍采用S曲線進行軌跡規(guī)劃。S曲線通過使軌跡加速度曲線平滑連續(xù)來避免機械沖擊,進而減小對臺體的損害。普遍采用的S曲線軌跡設計方法是:設計出一個準則J,給定邊界條件,在滿足這些邊界的前提下,找到能夠使優(yōu)化準則J最小的解來規(guī)劃軌跡。常用的S曲線設計準則有時間最優(yōu)、力最小、能量最小、沖擊最小以及它們的復合準則等。表1列出了S曲線相應的邊界條件和軌跡表達型式,以便對比。
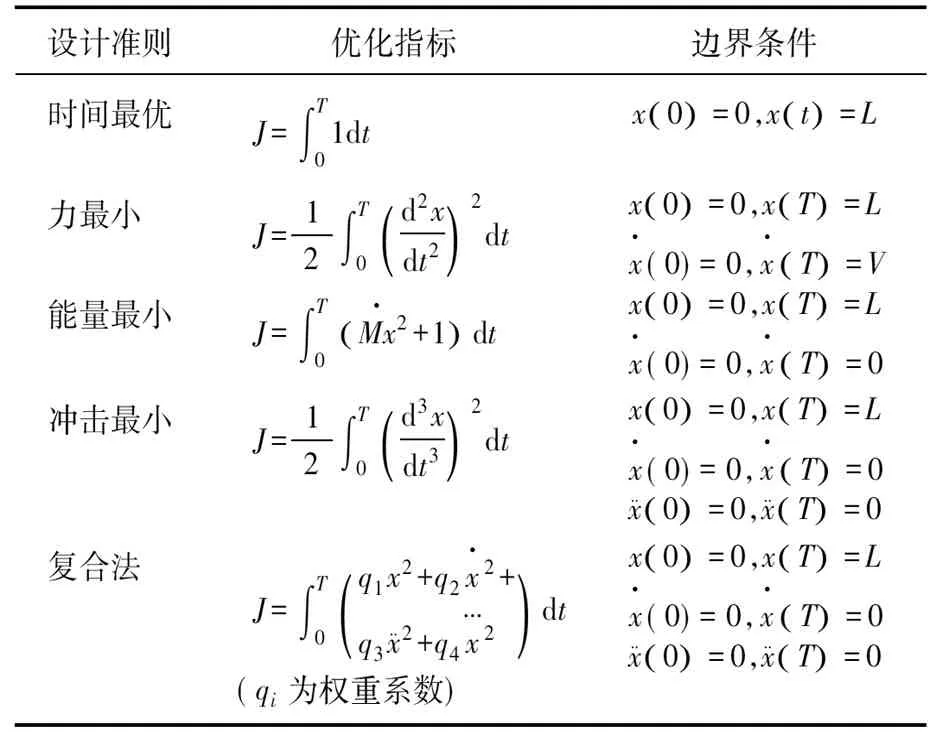
表1 S曲線主要設計準則
單純的時間最優(yōu)規(guī)則只考慮時間的最優(yōu)解,而不考慮曲線連續(xù)性、沖擊、能量等因素,通常不直接作為實際軌跡使用,而是考慮與其他規(guī)則配合。能量最小的方法在某種程度上可以等效于驅動器輸出受限的時間最優(yōu)法,但是光刻系統(tǒng)并不對能耗做任何要求,所以也不適用本系統(tǒng)。復合法是一種考慮非常全面的方法,它利用了曲線線性的特點,可以考慮到幾乎所有的約束準則;并根據(jù)實際情況調整權重系數(shù)qi的值,使軌跡能夠滿足某些系統(tǒng)的苛刻要求。對于掃描光刻系統(tǒng),由于系統(tǒng)對測量精度要求極高,也就必須避免一切不必要的機械沖擊,且系統(tǒng)追求效率,因此,通常結合使用沖擊最小和時間最優(yōu)的準則對S曲線進行設計。一個典型的5階S曲線如圖1所示。

圖1 一個周期行程的S曲線示意圖
除了對速度和加速度進行限制外,還需對系統(tǒng)的加速度進行限制,使整個跟蹤軌跡較為平滑。
參考軌跡包含了以下幾個過程:①從零時刻經過加速過程到達t1時刻;②t1~t2時間段為加速結束后的動態(tài)調整過程,稱為調節(jié)時間;③t2~t3時間段為勻速掃描曝光階段,此時對硅片進行動態(tài)曝光;④t3時刻后,系統(tǒng)將進入減速階段,此時一個曝光小片的曝光結束。
從t3時刻開始,臺體在減速的同時,沿x軸方向進行步進運動,直到運動到下一個小片的起始位置,然后沿著y軸相反的方向進行掃描曝光[7]。
根據(jù)上述條件得到一個5階S曲線的表達式如下。
(1)
(2)
式中:vs為掃描速度;ls為加速過程的位移;ρ為一個正常數(shù)參數(shù)。
將實際數(shù)據(jù)代入計算,一個位移為30 mm的5階S曲線的整個行程的示意圖如圖2所示。從圖2可以看出,軌跡的前后兩部分存在對稱關系。
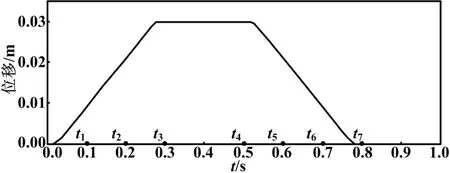
圖2 5階S曲線完整周期
2 分段迭代學習控制
2.1 分段迭代學習控制器設計
為了更好地利用分段迭代學習對控制量的預測和穩(wěn)定效果,對上述軌跡進行分析。如圖2所示,在掃描段的t1、t3、t5、t7是加速度變化最為劇烈的幾個關鍵時刻,在反饋作用下,也是跟蹤誤差變化最大的時刻。若系統(tǒng)已經對前一個迭代周期的完整時間段內的誤差進行學習,則在上述幾個時刻周圍都會引起強烈的學習控制作用。然而,這些控制作用是否都是積極的值得進一步探討。可以預見,在反饋和迭代學習的共同控制作用下,t2~t3段和t6~t7段作為光刻系統(tǒng)的勻速掃描過程相對穩(wěn)定,會獲得較好的跟蹤性能,因為此時無論是推理波動還是系統(tǒng)模型都相對穩(wěn)定,具有很強的規(guī)律性。而在t0~t2段和t4~t6段,系統(tǒng)處于劇烈的動態(tài)調節(jié)過程,系統(tǒng)模型可能受到多種擾動,跟蹤性能會大打折扣。因此,在t1和t5時刻,系統(tǒng)由動態(tài)特性變化到靜態(tài)特性,學習控制可以有效減小調節(jié)時間;而t3和t7時刻的學習作用由于與t1和t5時刻是對稱的,系統(tǒng)由靜態(tài)特性變化到動態(tài)特性,此時的學習控制為了改善減速階段的性能,很可能犧牲周圍區(qū)域的跟蹤特性。顯然,前者對系統(tǒng)的掃描性能的影響是所期望的,而后者則不然[8-11]。因此,引入分段學習控制的思想有充分的必要性。根據(jù)上述分析,可將掃描光刻系統(tǒng)的學習控制作用分為六段。第Ⅰ段為t0~t2區(qū)間,第Ⅱ段為t2~t3區(qū)間,第Ⅲ段為t3~t4區(qū)間,第Ⅳ段為t4~t6區(qū)間,第Ⅴ段為t6~t7區(qū)間,第Ⅵ段為t7~1.0 s區(qū)間。則在原有學習控制律Ls的基礎上,通過引入分段學習加權正定陣,進而得到分段迭代學習控制律的矩陣形式,可以表達為:
L=L1+L2+L3+L4+L5+L6=
W1LsW1+W2LsW2+W3LsW3+
W4LsW4+W5LsW5+W6LsW6
(3)

2.2 分段迭代學習收斂性證明

(4)
(5)
實際上,有限時間段內的迭代學習控制律是對頻域內迭代學習控制律的有效截短。對于穩(wěn)定的學習控制律而言,這樣的處理不僅不會影響算法的收斂性,而且會改善系統(tǒng)在最關鍵的勻速掃面段的性能。
3 系統(tǒng)仿真
為了驗證上述理論,首先將生成的S曲線導入到系統(tǒng)模型當中作為位置給定輸入,系統(tǒng)的其他結構保持不變。此時按照原有的迭代學習控制率進行仿真,得到的結果如圖3所示。
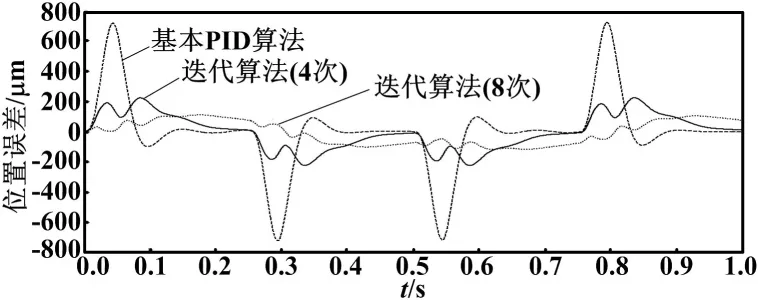
圖3 全局迭代S軌跡的系統(tǒng)誤差曲線
從圖3可以看出,正如上文分析的一樣,常用的反饋控制律往往在過渡過程段性能較差,迭代學習控制的優(yōu)點是可以改善過渡過程段的跟蹤性能。經過8次迭代學習控制之后,直線電機在加速段的動態(tài)誤差得到了很好的抑制。然而,在勻速掃描階段,系統(tǒng)的誤差曲線卻出現(xiàn)了明顯的劣化。在速度和位置控制環(huán)PID控制器的作用下,直線電機系統(tǒng)經過調整時間之后,在勻速段由定位力擾動引起的誤差被控制在19 μm以內。但是由于有全局迭代學習的引入,作為抑制動態(tài)加速段的跟蹤誤差的副作用,該勻速段的誤差峰值甚至達到了108 μm。即使不對電機定位力擾動進行補償,也不應出現(xiàn)如此大的跟蹤誤差。這種結果顯然是不能接受的,畢竟對于光刻掃描系統(tǒng)而言,最關鍵的階段就是勻速掃描階段,這一段的系統(tǒng)性能應該得到最高優(yōu)先級的保證。因此,基于仿真試驗的結果,進行分段迭代控制的必要性毋庸置疑。
由于完整S軌跡的對稱性,先對其上升階段進行分段試驗。上升段包含了之前規(guī)劃的第Ⅰ段(t0~t2區(qū)間)、第Ⅱ段(t2~t3區(qū)間)以及第Ⅲ段(t3時刻之后)。由于迭代學習控制對于系統(tǒng)動態(tài)性能有顯著提高,所以在第Ⅰ段和第Ⅲ段仍應盡量發(fā)揮迭代學習控制的作用。而對于勻速掃描階段第Ⅱ段,則要在保證其對直線電機定位力擾動補償作用的前提下,適當削減由區(qū)間周圍的劇烈誤差變化學習作用。經過對PID型迭代算法參數(shù)的反復調節(jié),得到如圖4、圖5所示的仿真曲線。
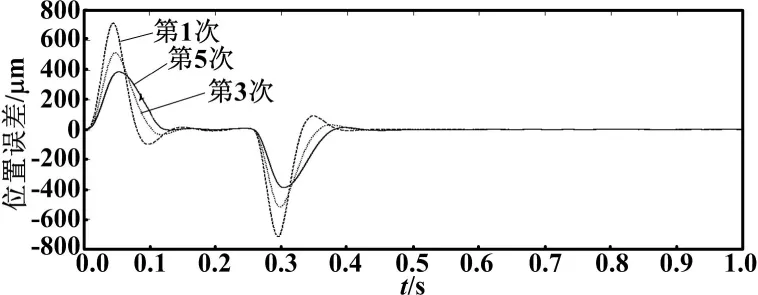
圖4 S軌跡的系統(tǒng)誤差曲線
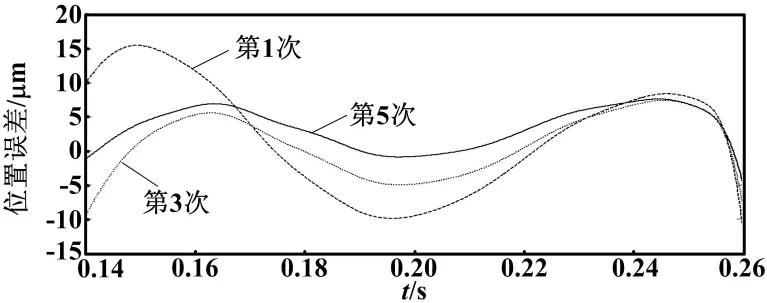
圖5 S軌跡的系統(tǒng)勻速段誤差曲線
從圖4和圖5可以看出,經過對迭代學習進行分段之后,系統(tǒng)在勻速段的控制效果得到了明顯改善,而加速段雖然不及原算法效果顯著,但是仍在迭代學習控制之下有明顯的收斂趨勢。對曲線勻速段進行放大觀察,可以看到,經過時間段0.15~0.25 s的勻速掃描區(qū)間,電機的定位力擾動依然得到了有效補償,波動幅值從原始的19 μm減小到了8 μm以內,削減了約57.8%。
對全局迭代的方式和分段迭代的方式得到的誤差二范數(shù)進行比較,結果如圖6所示。
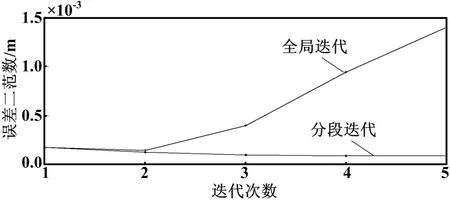
圖6 沿迭代軸的誤差二范數(shù)曲線
將分段方法和對應的參數(shù)對稱地擴展到整個S曲線,仿真結果如圖7所示。
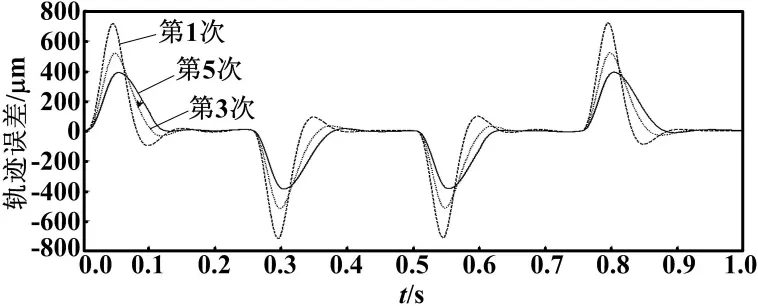
圖7 完整S曲線分段迭代曲線
可見,在S曲線全行程上,上述分段迭代學習方法確實適用,其勻速掃描階段的細節(jié)部分和圖6一致。因此,相比全局迭代算法,分段迭代學習補償控制才真正滿足系統(tǒng)的實際需求。
4 結束語
在實際系統(tǒng)中引入迭代學習控制算法時,雖然可以滿足收斂性,但是往往會造成系統(tǒng)在特定環(huán)節(jié)的劣化。為此,針對光刻機實際掃描過程的軌跡需求,對迭代學習控制器進行分段優(yōu)化,并通過仿真證明了其可行性。
[1] 吳敏鏡.超精密加工的技術基礎和創(chuàng)新[J].新技術新工藝,2006(5):7-10.
[2] 李艷秋.光刻機的演變及今后發(fā)展趨勢[J].微細加工技術,2003(2):1-5.
[3] Mishra S,Tomizuka M.Projection-based iterative learning control for wafer scanner systems[J].Mechatronics,IEEE/ASME Transactions on,2009,14(3):388-393.
[4] Lee J H,Lee K S,Kim W C.Model-based iterative learning control with a quadratic criterion for time-varying linear systems[J].Automatica,2000,36(5):641-657.
[5] Butcher M,Karimi A.Linear parameter-varying iterative learning control with application to a linear motor system[J].Mechatronics, IEEE/ASME Transactions on,2010,15(3):412-420.
[6] De Roover D,Bosgra O H.Synthesis of robust multivariable iterative learning controllers with application to a wafer stage motion system[J].International Journal of Control,2000,73(10):968-979.
[7] 陳興林,姜曉明,王巖.掃描光刻系統(tǒng)的分段迭代學習控制策略[J].Journal of Harbin Institute of Technology,2013,45(7):18-23.
[8] 胡玉娥,翟春艷.迭代學習控制現(xiàn)狀與展望[J].自動化儀表,2005,26(6):1-4.
[9] 張奕,王喜順.迭代學習的高速伺服系統(tǒng)位置控制策略[J].自動化儀表,2010,31(2):21-24.
[10]全權,魏子博,高俊,等.軟管式自主空中加油對接階段中的建模與控制綜述[J].航空學報,2014(9):2390-2410.
[11]尚樺,李海軍,閆清,等.迭代學習控制的分析與仿真[J].自動化技術與應用,2013(8):6-9.
Segmented Iterative Compensation Strategy under Scanning Track
To improve the quality of step scan of the reticle stage system of lithography, thus enhance the quality of the finished products of silicon wafers, the trajectory planning based on S-curve is proposed. The iterative learning control is studied, and in accordance with the limitations under specific part of the system becomes deterioration in the general global iteration algorithm, the iterative learning controller is optimized in segmentally by adopting segmented iterative compensation strategy. The simulation indicates that iterative learning control satisfies practical demands for the system; it can be used in commissioning of the reticle stage system.
Lithography Reticle stage Step scan S-curve Segmented iterative learning control
國家重大科技專項基金資助項目(編號:2009ZX02207)。
魏凱(1990-),男,現(xiàn)為哈爾濱工業(yè)大學控制科學與工程 專業(yè)在讀碩士研究生;主要從事超精密伺服運動控制方面的研究。
TP273+.3
A
10.16086/j.cnki.issn1000-0380.201505005
修改稿收到日期:2014-08-25。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
