基于AMT并聯混合動力系統(tǒng)的CAN通信設計*
2015-06-22 15:05:59宋超席力克羅銳謝勇波朱田文健峰王文明
網絡安全與數據管理 2015年13期
關鍵詞:發(fā)動機
宋超,席力克,羅銳,謝勇波,朱田,文健峰,王文明
(湖南南車時代電動汽車股份有限公司,湖南株洲412007)
基于AMT并聯混合動力系統(tǒng)的CAN通信設計*
宋超,席力克,羅銳,謝勇波,朱田,文健峰,王文明
(湖南南車時代電動汽車股份有限公司,湖南株洲412007)
針對AMT并聯混合動力系統(tǒng)部件組成與通信性能要求,提出了一種雙總線CAN拓撲結構的實時性通信解決方案。該方案構建了基于AMT控制器“路由”轉發(fā)的消息系統(tǒng),設計了符合TTCAN協議內容的消息時間觸發(fā)機制,能夠滿足換檔過程整車控制器、AMT控制器、電機控制器、發(fā)動機ECU之間數據通信的高實時性要求,實現整車控制器與AMT控制器命令的無縫集成,建立持續(xù)可靠的通信連接。
AMT并聯混合動力;整車控制器;AMT控制器;TTCAN
0 引言
隨著能源危機與環(huán)境問題的日益突出,國家對于新能源汽車產業(yè)的扶持力度逐步加大,混合動力作為新能源汽車的重要組成部分,吸引了不少企業(yè)與機構的加入。電控機械式自動變速箱(Automated Mechanical Transmission,AMT)并聯混合動力以其良好的操作性與相對低廉的價格,從眾多混合動力車型中脫穎而出,在多個城市得到應用。
AMT混合動力包含直連式、角傳動等多種結構,直連式系統(tǒng)由于驅動電機位于變速箱輸入側,功率配置較大,可直接進行電機低速驅動,制動回收效果好,成本控制與經濟性效應明顯。
與傳統(tǒng)AMT車輛相比,直連式混合動力系統(tǒng)更加復雜,變速器檔位切換與離合控制過程涉及的部件更多,需要頻繁地使用整車控制器局域網絡(Controller Area Network,CAN)進行通信,數據交互量大,實時性要求高。為確保整車通信安全、可靠,選擇較優(yōu)的網絡結構設計與交互方式顯得尤為重要。
1 AMT車輛結構
直連式AMT并聯混合動力系統(tǒng)傳動鏈同軸耦合,由發(fā)動機、電控離合器、驅動電機、AMT變速器組成,支持電機直驅、發(fā)動機直驅以及混合驅動3種工作模式。系統(tǒng)結構如圖1所示。

圖1 AMT并聯混合動力系統(tǒng)機電耦合結構
低速階段,電機進行直驅;當速度上升或電壓不足時,離合器結合,發(fā)動機參與驅動。整車控制器負責電機/發(fā)動機的動力分配;AMT控制器負責車輛運行過程的檔位切換與離合控制。因此AMT并聯系統(tǒng)需要構建基于整車控制器(Vehicle Control Unit,VCU)與自動變速箱控制器(Transmission Control Unit,TCU,即AMT控制器)的混合網絡控制系統(tǒng)。
2 CAN網絡設計
AMT并聯混合動力系統(tǒng)是基于CAN總線構建的整車網絡。CAN總線是一種串行多主站控制器局域網總線,具有很高的網絡安全性、通信可靠性和實時性,簡單實用,網絡成本低,特別適用于汽車計算機控制系統(tǒng)和環(huán)境溫度低劣、電磁輻射強和震動大的工業(yè)環(huán)境[1]。
AMT并聯混合動力系統(tǒng)中的CAN通信設備包括整車控制器、電機控制器、發(fā)動機ECU(Electronic Control Unit,汽車專用控制器)、AMT控制器、超級電容或電池管理系統(tǒng)、儀表等,部分電氣部件如空調、絕緣檢測裝置等也可能集成CAN通信功能,具體視車輛配置而定。
整車CAN網絡波特率設定為250 kb/s,為避免總線負荷率過高,需要針對不同通信任務指定不同級別的通信周期。整車控制器、電機控制器、AMT控制器的通信任務影響車輛運行狀態(tài)與駕駛安全,實時性要求最高;發(fā)動機ECU消息遵循SAE J1939協議;儀表主要接收數據;超級電容或電池管理系統(tǒng)對儲能系統(tǒng)的運行狀態(tài)進行維護,實時性要求一般,但消息數量大。
整車CAN網絡設計應考慮對傳統(tǒng)車輛CAN結構的兼容性,如發(fā)動機ECU與儀表應處于相同的通信子網。
整車控制器、AMT控制器既參與電機控制,也存在與發(fā)動機ECU的交互,為減少路由導致的消息冗余,要求通信雙方處于相同子網。
根據上述原則,AMT并聯混合動力系統(tǒng)采用CAN雙網絡拓撲結構,包含CANA和CANB 2個子網,如圖2所示。CANA由實時性要求較高的通信設備構成,包括整車控制器、電機控制器以及AMT控制器;CANB包含傳統(tǒng)部件如發(fā)動機ECU、儀表等,也包括通信實時性要求不高的管理系統(tǒng)。由于整車控制器、AMT控制器存在與發(fā)動機ECU的通信,因此也連接到CANB子網。
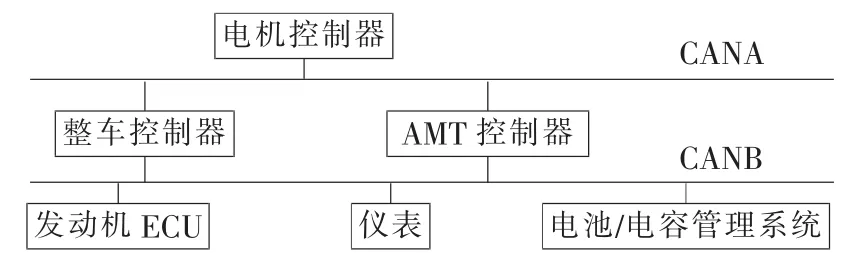
圖2 整車CAN網絡結構
對于AMT并聯控制系統(tǒng),動力性、經濟性與換檔平順性是衡量車輛性能的重要指標。整車控制器根據整車電量、當前檔位、部件狀態(tài)等參數決定當前車輛是工作在純電驅動模式還是并聯驅動模式,不同模式下的整車需求扭矩由整車控制器根據司機踏板深度、當前檔位速比進行換算,并最終由電機控制器、發(fā)動機ECU執(zhí)行。
純電驅動模式下,整車控制器建立與電機的通信連接,實現車輛加速、制動等駕駛需求;檔位切換過程中,AMT控制器對變速箱前后端轉速進行調節(jié),需要短暫剝奪整車控制器對電機控制器的通信能力,以控制電機轉速實現檔位快速切換。這樣整車控制器到電機控制器,AMT控制器到電機控制器的通信會存在“建立-斷開”的過程。這種方式可以完成換檔操作,但是連接狀態(tài)的頻繁改變,會增大通信連接的滯后時間,增加通信協議的復雜程度,也不利于通信狀態(tài)的檢測。為此,建立基于AMT控制器“路由”的通信方式,整車控制器到電機控制器的消息并不直接發(fā)送,而是通過AMT控制器進行地址修改與路由轉發(fā)。如圖3所示。如果當前沒有進行換檔,AMT控制器修改消息ID后直接轉發(fā)消息內容;如果當前正在進行換檔同步,AMT控制器修改電機工作模式為轉速控制,添加目標轉速等參數到消息,然后再進行發(fā)送。整個過程整車控制器到AMT控制器、AMT控制器到電機控制器的通信連接一直建立,避免通信狀態(tài)的變化,提高連接過程的可靠性。
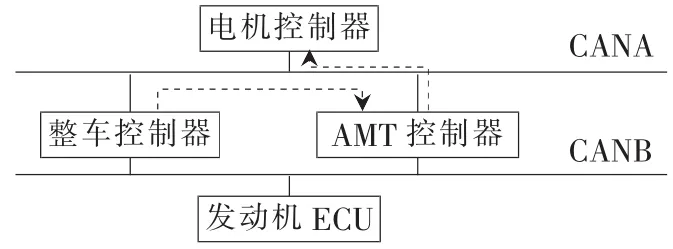
圖3 換檔過程整車CAN網絡“路由”
并聯驅動模式下,整車控制器建立與發(fā)動機ECU的通信,確保發(fā)動機工作在油門控制模式,目標扭矩通過轉換成油門信號發(fā)送給ECU。換檔過程中,需要進行離合控制,AMT控制器剝奪整車控制器對ECU的通信能力,控制發(fā)動機工作在轉矩/轉速控制模式,實現離合控制過程的調扭、轉速同步等功能,因此整車控制器、AMT控制器與發(fā)動機ECU之間的通信連接也存在“建立-斷開”的過程,同理也需要建立基于AMT控制器“路由”的通信方式。如圖4所示,整車控制器到發(fā)動機ECU的消息由AMT控制器進行轉發(fā),離合時由AMT修改相關控制命令與參數,實現通信連接的無縫切換。
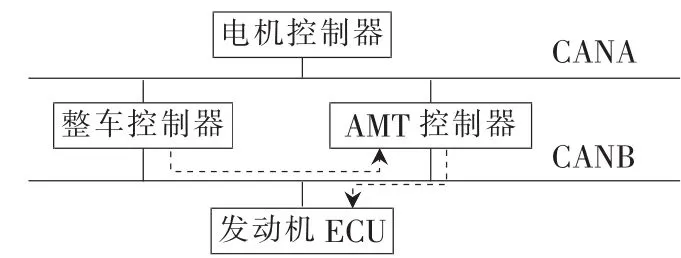
圖4 離合過程整車CAN網絡“路由”
3 TTCAN通信協議設計
檔位切換與離合控制過程中,整車CANA網絡通信實時性要求較高,AMT并聯混合動力系統(tǒng)采用基于時間觸發(fā)的TTCAN通信協議設計,可提高網絡通信效率,降低總線峰值負荷,確保數據交互安全可靠。
TTCAN是建立在原有CAN協議基礎之上的高層協議,對網絡上所有CAN節(jié)點進行通信時序同步,并提供了全局系統(tǒng)時間。所有節(jié)點同步以后,任何消息都只能在特定時間段內發(fā)送,不需要與其他消息進行競爭[1]。
整車CANA網絡各部件CAN通信芯片不支持TTCAN通信功能,需要制定符合TTCAN標準的通信協議矩陣,從軟件層面實現通信消息的時序控制。
整車CANA網絡存在的通信消息如表1所示。
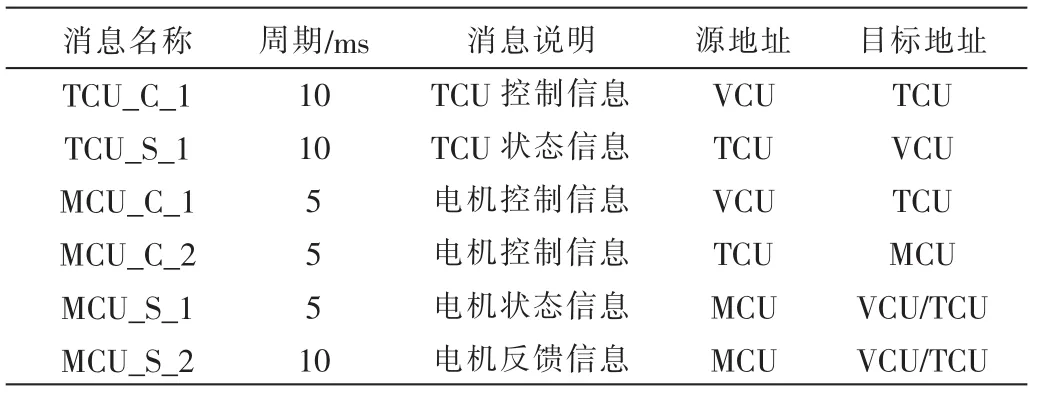
表1 整車CANA網絡通信消息
整車CANA網絡采用擴展消息幀格式,有29位標識符,其數據幀由7個不同的位場組成,包括幀起始、仲裁場、控制場、數據場、CRC場、應答場和幀結束。
為滿足周期型消息幀的傳遞,采用TTCAN協議的每個獨立的消息幀需要占用的最小時長w按下式計算[2-3]:

其中,ti為幀間時間間隔,取3tbit(tbit為位傳輸時間);tTX_EN為消息幀可觸發(fā)區(qū),取16tbit;Cj為消息幀傳輸時間,其計算公式為:

其中,dj為消息幀的數據場字節(jié)長度。
整車CAN網絡通信速率為250 kb/s,每個消息幀傳遞至少需要0.6ms。以TCU_C_1為參考消息幀,基于1ms時間段建立TTCAN協議矩陣,10個時間段構成1個循環(huán)周期,所有消息幀的發(fā)送順序和時間間隔如圖5所示。
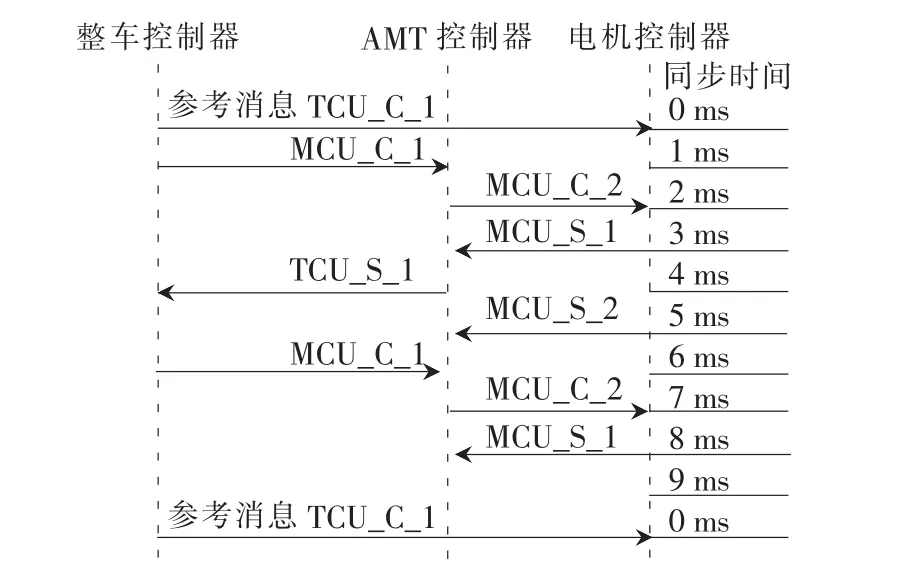
圖5 CANA網絡各消息幀時間觸發(fā)
對于整車控制器,發(fā)送完參考消息幀后,啟動時間計數,當計數周期到達時間間隔時,發(fā)送對應幀;對于電機控制器和AMT控制器,接收到整車控制器發(fā)送的參考消息幀后,啟動內部定時器進行計數,當計時達到時間間隔,發(fā)送對應幀。
由于內部時鐘電路的不一致性以及時鐘漂移等影響,導致整車控制器、電機控制器與AMT控制器對于時間段長度的“認定”存在差別,需要進行時間單元比率的修正,修正公式如下:

式中,tref為電機控制器接收到相鄰兩個參考消息幀的時間間隔,tclock為電機控制器按照其時鐘定義計算的單個時間段長度。AMT控制器時間單元比率計算類似。
電機控制器、AMT控制器需要設置同步失效時間:
如果電機控制器、AMT控制器超出此時間長度仍未檢測到參考消息幀,則退出TTCAN協議;如果后續(xù)接收到有效的參考消息幀,則自動切換至TTCAN協議發(fā)送。電機控制器、AMT控制器的詳細處理流程如圖6。
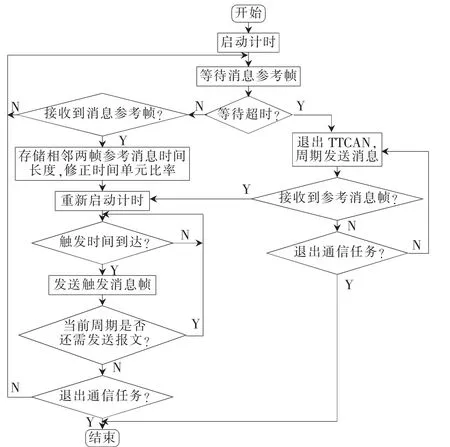
圖6 TTCAN消息處理機制
4 應用實例
基于AMT并聯混合動力系統(tǒng)進行通信連接與可靠性測試,采集檔位切換與離合控制過程電機、發(fā)動機轉速/扭矩等相關信息,繪制如圖7所示曲線。
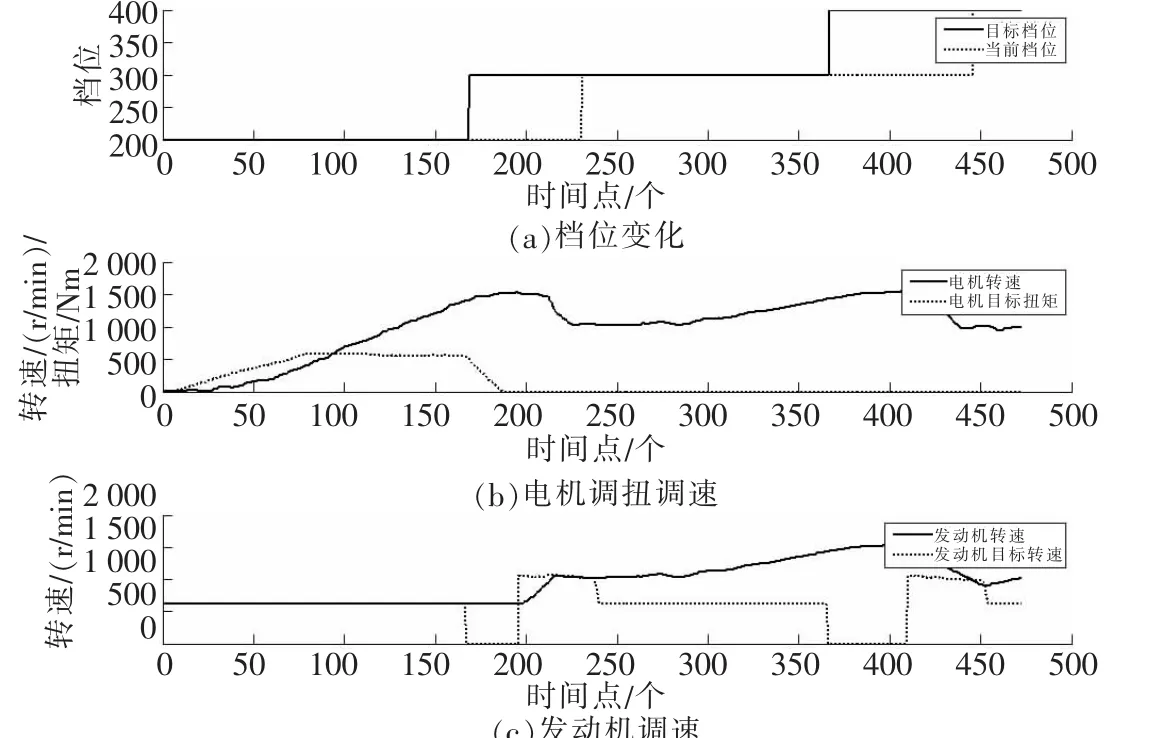
圖7 AMT并聯混合動力客車換檔過程
此時AMT并聯混合動力客車處于并聯工作模式。由圖7可知,檔位切換過程中,AMT控制器獲得電機控制權限,電機不再響應整車控制器發(fā)送的目標扭矩命令,AMT控制器控制電機降扭、同步轉速;離合控制過程中,AMT控制器獲得發(fā)動機控制權限,發(fā)動機不再響應整車控制器油門命令,發(fā)動機ECU工作在轉速控制模式,響應AMT控制器發(fā)送的目標轉速,實際轉速逐步逼近目標轉速,當兩轉速差達到結合條件,離合器執(zhí)行結合動作,換檔過程全部完成。整個過程電機、發(fā)動機實現了對整車控制器、AMT控制器命令切換的無縫響應。通過對比CANA實際通信數據,發(fā)現各消息幀發(fā)送有序、時間間隔固定,滿足TTCAN協議矩陣的設計內容。
5 結論
基于AMT并聯控制系統(tǒng)的CAN通信設計采用雙網絡拓撲結構,根據通信數據實時性要求劃分子網,在兼容傳統(tǒng)CAN網絡拓撲的基礎上,實現電動總成批量數據的高速、可靠傳遞。
檔位切換與離合控制過程,針對電機、發(fā)動機轉速/轉矩精準控制與快速響應的要求,建立基于AMT控制器的消息路由機制,確保數據直接、高效傳遞,通信連接無縫切換。
針對實時通信子網CANA采用時間觸發(fā)式TTCAN協議設計,制定固定時序的消息發(fā)送策略,實行連接異常出現后的同步失效控制,確保網絡通信可靠、靈活。參考文獻
[1]羅峰,孫澤昌.汽車CAN總線系統(tǒng)原理設計與應用[M].北京:電子工業(yè)出版社,2010.
[2]林凱,羅禹貢,李克強.混合動力電動車TTCAN網絡系統(tǒng)設計[J].微計算機信息,2007,23(32):267-268.
[3]孫國良,耿慶波,李保奎.TTCAN在分布式客房控制系統(tǒng)中的應用[J].控制工程,2010,17(9):49-51.
The CAN communication design based on AMT parallel hybrid system
Song Chao,Xi Like,Luo Rui,Xie Yongbo,Zhu Tian,Wen Jianfeng,Wang Wenming
(Hunan CSR Times Electric Vehicle Co.,Ltd.,Zhuzhou 412007,China)
For AMT parallel hybrid system components and communication performance,a real-time communication solution based on two CAN bus topology structure is proposed.In this solution,the message system based on TCU is constructed,and the message time trigger mechanism which meets the TTCAN protocol content is designed.Finally,the data communication high realtime requirement among VCU,TCU,MCU and ECU is satisfied.The control command integration between VCU and TCU is achieved,and the reliable communication is established.
AMT parallel hybrid system;VCU;TCU;TTCAN
TP273.5
A
1674-7720(2015)13-0059-03
2015-02-02)
宋超(1987-),通信作者,男,碩士,中級工程師,主要研究方向:動力系統(tǒng)匹配與整車控制軟件開發(fā)。E-mail:songchao2@csrzic.com。
國家高技術研究發(fā)展計劃(863計劃)(2011AA11A209)
席力克(1972-),男,碩士,高級工程師,主要研究方向:混合動力與純電動車型開發(fā)。
羅銳(1987-),男,碩士,初級工程師,主要研究方向:整車控制軟件開發(fā)。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15