卡爾曼濾波在某跨聲速風洞CTS機構連續動態軌跡捕獲試驗技術中的應用
2015-06-23 09:09:29祝汝松張俊生
實驗流體力學 2015年1期
關鍵詞:卡爾曼濾波
王 飛, 祝汝松, 張俊生
(1. 中國空氣動力研究與發展中心 設備設計及測試技術研究所, 四川 綿陽 621000;2. 中國空氣動力研究與發展中心 空氣動力學國家重點試驗室, 四川 綿陽 621000)
卡爾曼濾波在某跨聲速風洞CTS機構連續動態軌跡捕獲試驗技術中的應用
王 飛1,2, 祝汝松1,2, 張俊生1,2
(1. 中國空氣動力研究與發展中心 設備設計及測試技術研究所, 四川 綿陽 621000;2. 中國空氣動力研究與發展中心 空氣動力學國家重點試驗室, 四川 綿陽 621000)
外掛物分離軌跡捕獲技術是世界上一種先進而且難度較大的風洞試驗技術,國內某跨聲速風洞捕獲軌跡試驗裝置(CTS)首次對連續動態軌跡捕獲實驗技術進行了研究。本文首先介紹了該跨聲速風洞CTS機構動態軌跡的預測方法,隨后對該機構連續動態軌跡同步控制方法的具體實現步驟進行了較為詳細的描述,分別介紹了無緩沖和有緩沖的動態軌跡連續同步控制過程及約束條件;在此基礎上,針對CTS機構天平信號硬件濾波滯后和精度要求間矛盾的現實,引入泰勒中值定理,建立卡爾曼濾波(KF)模型,選取適當參數,對天平信號進行動態實時濾波處理,并與傳統的位置控制方式進行吹風試驗比較。試驗結果表明:卡爾曼濾波較好地平衡了CTS機構天平信號硬件濾波滯后和精度要求之間的矛盾,且分離軌跡的重復性得到了驗證,機構風洞吹風試驗的效率也大為提高。
跨聲速風洞;捕獲軌跡試驗裝置;連續;動態;卡爾曼濾波
0 引 言
外掛物從母機上分離(發射/投放)的軌跡特性模擬是一項非常重要的試驗技術,對母機飛行安全性評估有著極其重要的意義,同時也有助于發射/投放類航空武器的研究和發展。
國外在20世紀60、70年代開始對外掛物分離軌跡模擬試驗設備(多自由度捕獲軌跡試驗裝置,即CTS機構)及相關試驗技術的進行設計和研究,用于預測/模擬外掛物從母機上分離(發射/投放)的軌跡特性,這些特性包括外掛物的線位移、角位移、線速度、角速度、線加速度和角加速度以及氣動載荷等隨分離時間的變化。CTS機構運行控制流程主要分為兩步:①分離軌跡預測生成;②使用適度控制策略和算法控制機構按生成的軌跡運動。其運動控制具有高復雜性、多變量強耦合等特點,因此最初的軌跡預測/模擬是基于位置控制的,是一種“走-停-走”的控制過程,一條軌的預測/模擬運行時間較長,導致CTS機構風洞試驗效率低下。為此,70年代末,美國Arnold工程發展中心成功實現了基于速度控制的連續動態捕獲軌跡試驗技術,從而使得同一軌跡的預測/模擬運行時間大大縮短,提高了CTS機構風洞試驗效率。
國內在外掛物分離捕獲軌跡試驗技術領域的研究起步較晚,始于上世紀80、90年代,和國外的研究歷程相似,起初的CTS機構運行模式均基于位置控制。圖1為國內某跨聲速風洞CTS機構示意圖,它首次對連續動態軌跡捕獲試驗技術進行了系統性研究,既實現了位置控制,又實現了連續動態控制。
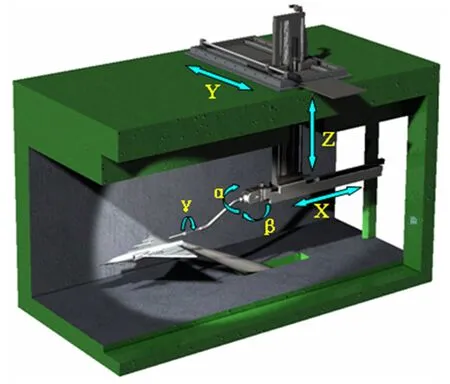
圖1 國內某跨聲速風洞CTS機構示意圖
在進行上述跨聲速風洞CTS機構吹風試驗時,筆者發現現有的外掛物模型天平信號的硬件濾波對軌跡預測的準確性和機構運行的實時性有一定的影響,同時這兩者又是矛盾的,為此在適當提高硬件低通濾波截止頻率的基礎上,引入卡爾曼軟件濾波算法,以期改善矛盾,提高吹風效率。
1 動態軌跡預測
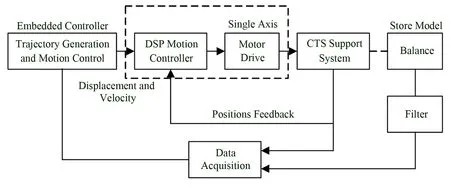
分離軌跡的預測生成是捕獲軌跡試驗技術研究的基礎,圖2給出了CTS機構控制原理。
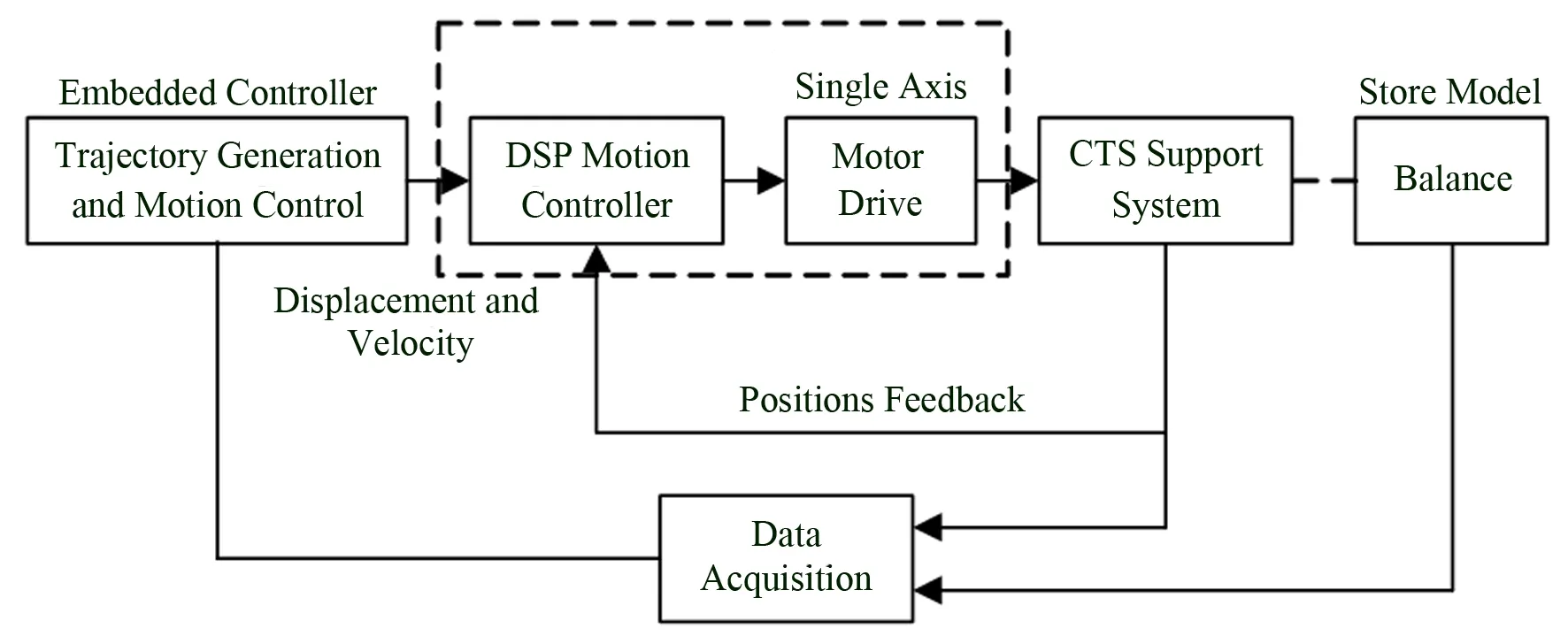
圖2 CTS機構控制原理圖
采集CTS機構當前軌跡點位置信息、六分量天平載荷信號,綜合其它相關信息,通過適度算法,預測目標位置值,由單軸(共6個軸)運動控制單元驅動機構各自由度同步運行至目標位置。
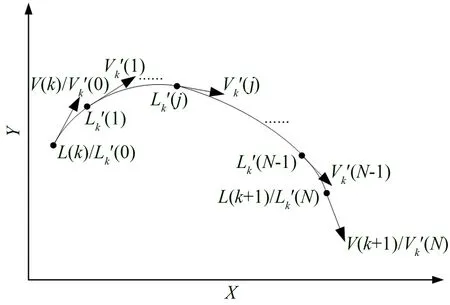
設f(k)為天平當前軌跡點載荷信號,包含fx(k)、fy(k)、fz(k)、fα(k)、fβ(k)、fγ(k)6個分量;L(k)為機構當前軌跡點位置,包含x(k)、y(k)、z(k)、α(k)、β(k)、γ(k)6個分量;Vl(k+1)為目標軌跡點理論速度,包含Vlx(k+1)、Vly(k+1)、Vlz(k+1)、Vlα(k+1)、Vlβ(k+1)、Vlγ(k+1)6個分量;L(k+1)為機構目標軌跡點的預測位置,包含x(k+1)、y(k+1)、z(k+1)、α(k+1)、β(k+1)、γ(k+1)6個分量,則可獲得機構軌跡預測方程:
(1)
式(1)描述為:機構目標軌跡點預測位置為當前軌跡點位置、天平載荷及目標軌跡點理論速度的函數方程,其函數法則Gk根據空氣動力學推導獲得。
2 連續動態軌跡同步控制方法
無論是最初的基于位置控制的捕獲軌跡試驗技術,還是后來的基于速度控制的連續動態捕獲軌跡試驗技術,其控制流程均為“生成目標軌跡點→機構運行至目標軌跡點→生成下一目標軌跡點→機構運行至下一目標軌跡點→……”。
傳統的位置控制方法,機構運行至每一目標軌跡點時速度均為零,在等待下一目標軌跡點生成后,再運行至下一目標軌跡點,其運動控制流程是“走-停-走-……”的模式,一條軌跡的運行時間較長,效率低下;而連續動態控制方法,機構是以連續平滑的方式通過每一目標軌跡點,在每一目標軌跡點位置均不需等待,同一軌跡的運行時間大大縮短,效率大為提高。
國內某跨聲速風洞CTS機構連續動態軌跡同步控制方法具體步驟描述如下:
(1)通過軌跡預測,實時獲得機構目標軌跡點預測位置;
(2)以極小時間間隔ΔT為基準,將當前軌跡點位置至目標軌跡點預測位置的運行軌跡分成N段;
(3)以每段實際起始位置及速度、目標軌跡點預測位置、基準時間、速度極限、加速度極限等信息為輸入條件,推導出ΔT時刻后機構目標位置,即下一段起始位置;
(4)將ΔT時刻后機構目標位置作為定位目標輸入運動控制系統,由運動控制系統完成機構定位控制;
(5)重復上述步驟,保證機構連續動態地逼近目標軌跡點預測位置,直至該步長運行結束;
(6)重復(1)~(5),直至機構所有軌跡點實時預測并運行結束。
CTS機構在整個軌跡預測和運行過程中,都以發揮機構最大能力為原則,但在某些步長內,可能因某些特殊原因不能發揮機構最大能力時,則需要進行緩沖處理。
2.1 無緩沖的動態軌跡連續同步控制

基準時間ΔT為一極小值,根據實際情況選取。該步長內N段各點速度由控制系統實時采集獲得,各自由度速度極限值為Vmax,加速度極限值為amax。
由機構當前點實際位置及速度、目標軌跡點預測位置、基準時間ΔT推導下一點機構位置,則有:
(2)
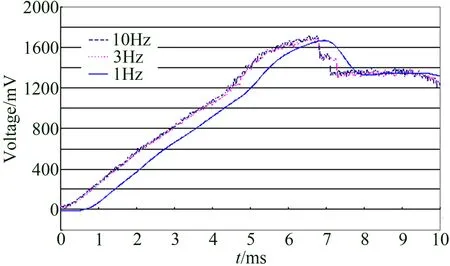
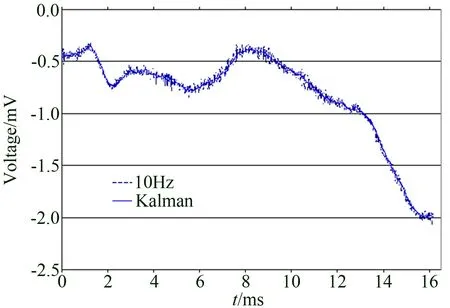
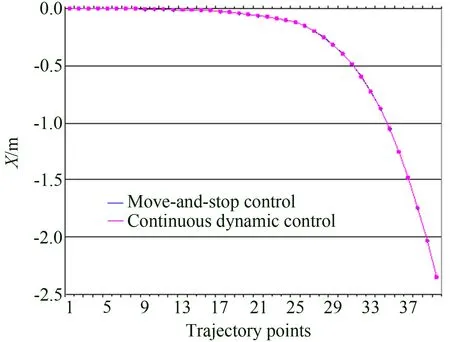
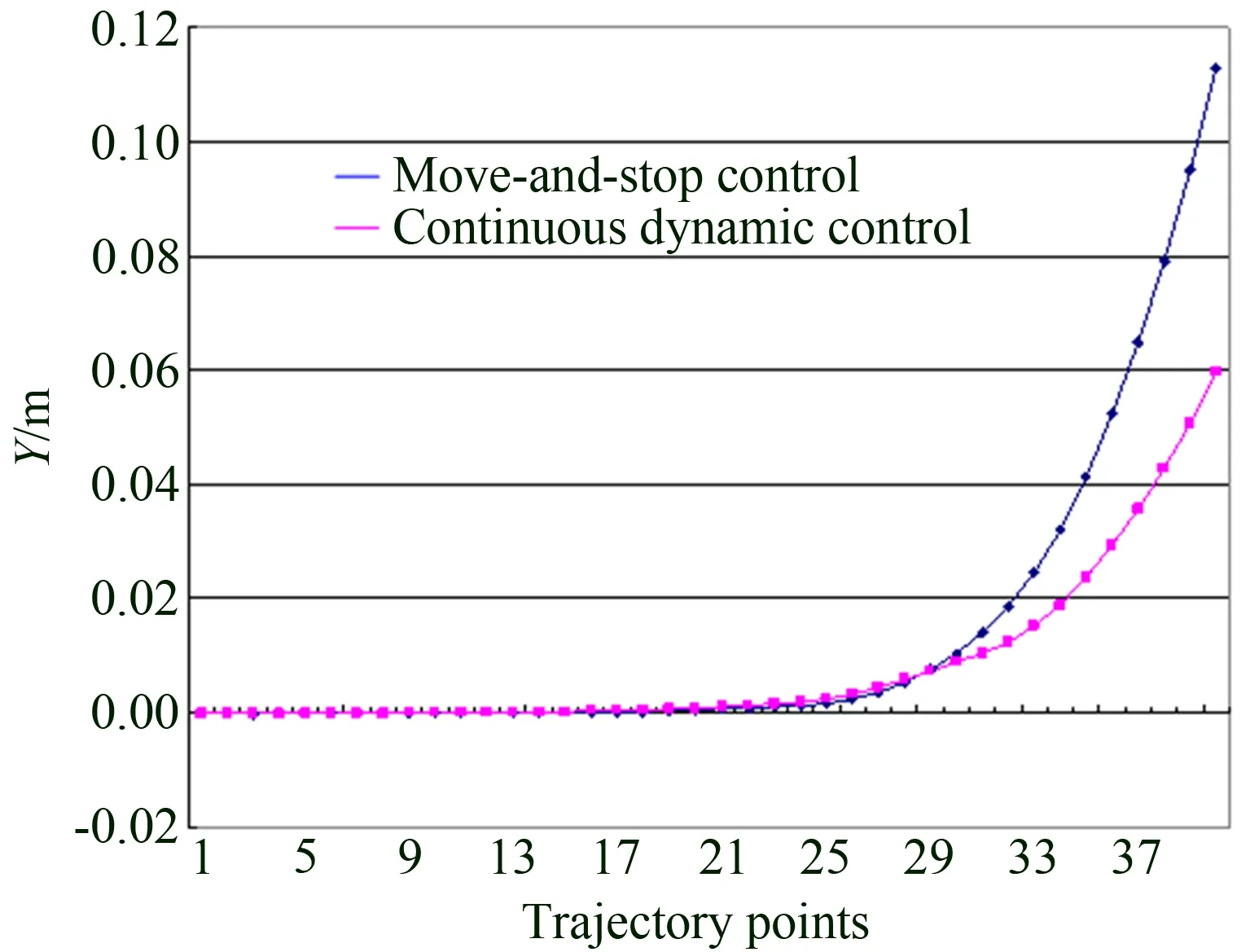
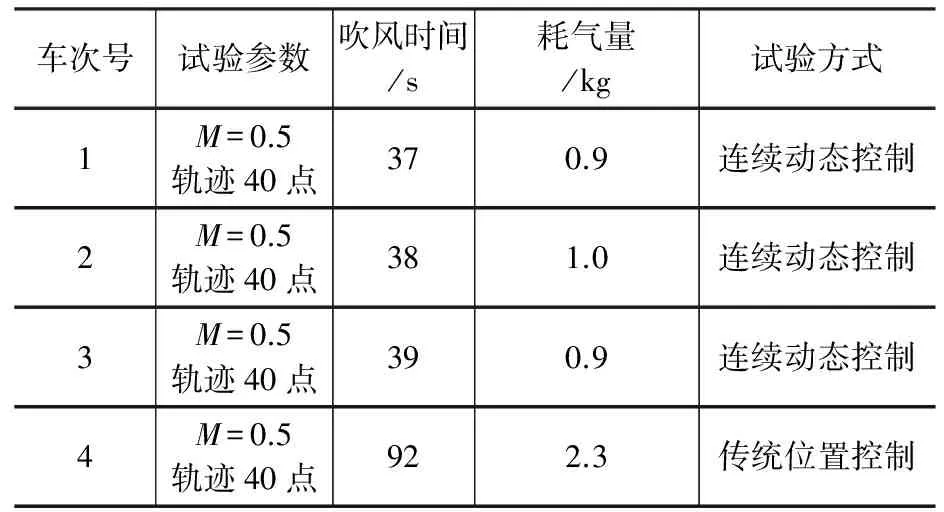
式(2)中0≤n 圖3 CTS機構同步過程示意(2軸) 通過以下幾個約束條件,可以對機構位置更新函數法則Fk,n進行求解:(1)機構不斷逼近目標軌跡點預測位置;(2)發揮機構最大運行能力;(3)基準時間ΔT極小,一般以ms為單位;(4)機構各自由度運行速度及加速度均不能超出機構運行速度Vmax及加速度極限amax。 2.2 有緩沖的動態軌跡連續同步控制 當遇到特殊情況(如某自由度緊急反向),需要預先對機構進行緩沖處理,緩沖完成后,機構進入目標軌跡點預測位置的同步運行。 CTS機構緩沖同步過程如圖4所示(圖示僅兩個自由度),L(k)至L(k+1)步長內各點位置推導函數法則仍為: 圖4 CTS機構緩沖同步過程示意(2軸) 當緩沖完成后,機構即進入目標點預測位置的同步運行,位置更新及函數法則Fk,n求解同2.1。 由式(1)知:CTS機構當前位置和六分量天平載荷信號直接影響目標點位置的預測,實際應用中,通常采用硬件或軟件濾波器對天平信號進行濾波處理,以保證機構軌跡預測的準確,圖5為加入天平信號濾波器的CTS機構控制原理圖。 圖5 加入濾波器的CTS機構控制原理圖 3.1 硬件濾波 為充分濾除高頻干擾對天平信號的影響,吹風中使用低通濾波器對天平信號進行濾波處理,其低通截止頻率分別為10Hz、3Hz和1Hz。 從圖6可知,在采用1Hz低通濾波時,濾波后的信號相對于3Hz和10Hz是有滯后的;而硬件10Hz濾波后的信號擾動最大,3Hz擾動為其次,1Hz擾動最小。 圖6 某型天平硬件10Hz、3Hz、1Hz濾波頻率下的數據對比 Fig.6 The comparison of the test results using hardware filtering on 10Hz, 3Hz and 1Hz of a balance 3.2 卡爾曼濾波 實際應用中,要求濾波滯后應盡量小,同時信號擾動應盡量減少。然而濾波滯后和信號擾動是相互矛盾的,為此,本文采取適當提高硬件低通濾波截止頻率,通過后續軟件濾波的方法來緩解上述矛盾,將卡爾曼濾波算法引入到CTS機構連續動態控制中,獲得了很好的效果。 (1)卡爾曼濾波算法簡介 上世紀60年代匈牙利數學家魯道夫·E·卡爾曼(Rudolf Emil Kalman)在他的博士論文和發表的論文“A New Approach to Linear Filtering and Prediction Problems”中提出了卡爾曼濾波理論,并導出了一套遞推估計算法,其基本思想是:采用信號與噪聲的狀態空間模型,利用前一時刻的估計值和現時刻的觀測值來更新對狀態變量的估計,求出現時刻的估計值。 系統離散狀態方程定義為: 式中:X(k)為系統狀態向量,k表示時間點;Φ(k)為狀態方程系數矩陣;U(k)為控制項;W(k)均值為0,方差為Q(k)的白噪聲;Z(k)為觀測向量;H(k)為觀測方程系數矩陣;V(k)為均值為0,方差為R(k)的白噪聲。 迭代過程如下: 系統時間傳播方程為: (a) (b) 在狀態值預測時,忽略B(k)U(k)項,采用下式作為系統時間傳播方程: 系統測量修正方程,即濾波增益為: (c) 系統狀態更新方程為: (d) (e) 上述“T”表示轉置,P(k)為系統狀態向量協方差。推導濾波過程按式(a)~(e)循環進行,直到濾波結束。 (2)濾波模型建立 在濾波器模型建立中,引入泰勒中值定理:若函數f(x)在開區間(a,b)上有N+1階導數,則當函數在(a,b)時,可展開為一個關于(x-x0)的多項式和一個余項的和,其形式為: 式中:x,x0∈(a,b),fn(x0)是f(x)的n階導數在x0處的值,Rn稱為拉格朗日余項。 離散系統中,x(k)代表函數x(t)在t=kT時刻的采樣值,其中T為x(t)采樣周期。根據泰勒展開式,建立n階系統離散狀態模型。 系統狀態向量為: 獲得系統狀態系數(T表示采樣周期)矩陣為: 圖7給出了風洞馬赫數M=0.5,模型天平某方向載荷在硬件10Hz濾波和2階卡爾曼濾波的數據對比。 圖7 10Hz硬件濾波及2階卡爾曼濾波下的數據對比 Fig.7 The comparison of the test results using hardware filtering on 10Hz and two-rank Kalman filtering 圖8為風洞馬赫數M=0.5,位置控制方式和連續動態控制方式(加入卡爾曼濾波)下,上述試驗模型CTS吹風試驗的分離軌跡對比。因各車次試驗工況不盡相同,導致了圖8中軌跡分離的偏差,該偏差是在機構運行允許范圍內的。 (a) X軸分離軌跡對比 (b) Y軸分離軌跡對比 Fig.8 The comparison of the test results generated by the move-and-stop control process and the velocity control process 表1給出了風洞馬赫數M=0.5,位置控制方式和連續動態控制方式(加入卡爾曼濾波)下,上述試驗模型不同車次CTS吹風試驗的風洞運行時間和耗氣量數據。 表1 連續動態控制方式和位置控制方式風洞運行數據 大量地面和模型吹風試驗表明:卡爾曼濾波算法在CTS機構中的應用有效可行,它改善了硬件(主要是1Hz低通)濾波滯后,同時滿足系統對數據精度的要求;卡爾曼濾波器的引入對CTS機構分離軌跡的重復性并無不利影響;CTS機構連續動態控制方式大大提高了風洞的吹風效率,節約成本50%以上,其效果已在大量吹風試驗中得到充分體現。 [1] Hill D W Jr. Development of a velocity control algorithm for controlling a 6-dof trajectory model support[R]. Propulsion Wind Tunnel Facility. Calspan Field Services, Inc./AEDC Division, Arnold Air Force Station, Tennessee. [2] Roy G. Wind tunnel captive trajectory testing using continuous velocity control[R]. Butler Instrumentation Engineer Propulsion Wind Tunnel Facility, Arnold Air Force Station, Tennessee. [3] Gargon F, Ph Taravel, Raffin J C. Recent developments in captive trajectory systems of the ONERA modane wind tunnels[C]. 39th Aerospace Sciences Meeting & Exhibit. [4] Andrew Garrell, Jay Nowakowski, Roman Paryz. Design & development of a new captive trajectory simulation model support system[C]. 35th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, 1999. [5] Zhu Rusong, Wang Fei, Li Ping, et al. The continuous dynamic simulation test of the captive trajectory system used in 2.4m transonic wind tunnel[C]. CCDC, 2011 [6] Zhou D H, Wang Q L. Strong tracking filtering of nonlinear systems with colored noise[J]. J of Beijing Institute of Technology, 1997, 17(3): 321-326. [7] Paulo S R Diniz. Adaptive filtering: algorithms and practical implementation[M]. 劉郁林, 景曉軍, 等譯. 北京:電子工業出版社. [8] 黃敘輝, 羅新福, 于志松. FL-24風洞新型捕獲軌跡系統設計與發展[J]. 空氣動力學學報, 2008, 26(2): 145-149. Huang X H, Luo X F, Yu Z S. Design and development of a new captive trajectory simulation system in FL-24 wind tunnel[J]. Acta Aerodynamica Sinica, 2008, 26(2):145-149. [9] 黃敘輝, 龐旭東, 宋斌. 1.2m跨超聲速風洞新型捕獲軌跡系統研制[J]. 實驗流體力學, 2008, 22(2): 95-98. Huang X H, Pang X D, Song B. Development of a new captive trajectory simulation system in the 1.2m transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(2): 95-98. [10] 高勤, 李志強, 都學新. 一種新型自適應卡爾曼濾波算法[J]. 現代雷達, 2001, 12(6): 29-34. Gao Q, Li Z Q, Du X X. A new adaptive Kalman filtering algoritnm[J]. Modern Radar, 2001, 12(6): 29-34. [11] 范文兵, 劉春風, 張淑貞. 一種強跟蹤擴展卡爾曼濾波器的改進算法[J]. 控制與決策, 2006, 36(1): 52-56. Fan W B, Lin C F, Zhang S Z. Improved method of strong tracking extended Kalman filter[J]. Control and Decision, 2006, 36(1): 52-56. [12] 虞旦, 韋巍, 張遠輝. 一種基于卡爾曼預測的動態目標跟蹤算法研究[J]. 光電工程, 2009, 21(1): 73-76. Yu D, Wei W, Zhang Y H. Dynamic target tracking with Kalman filter as predictor[J]. Opto-Electronic Engineering, 2009, 21(1): 73-76. (編輯:張巧蕓) 更 正 啟 事 本刊2014年第5期第112頁表2“優秀會議論文簡介”中序號1的論文信息有誤。原論文題名和作者“A cylindrical converging shock tube for Richtmyer-Meshkov instability study”和“Juchun Ding, Minghu Wang, Zhigang Zhai, Ting Si, Xisheng Luo”,應更正為“Experimental study on the interaction of a planar shock wave with a three-dimensional gaseous cylinder”和“Mojun Chen, Zhigang Zhai, Ting Si, Xisheng Luo”。由于本刊工作失誤對相關作者和讀者造成了困擾,特此致歉,同時向發現該錯誤的中國科學技術大學陳模軍表示由衷的感謝。 Application of Kalman filtering in continuous dynamic trajectory simulation technique of the captive trajectory system used in a transonic wind tunnel Wang Fei1,2, Zhu Rusong1,2, Zhang Junsheng1,2 (1. Facility Design & Instrumentation Institute, China Aerodynamics Research and Development Center, Mianyang Sichuan 621000, China; 2. The State Key Laboratory of Aerodynamics, China Aerodynamics Research and Development Center, Mianyang Sichuan 621000, China) The flying trajectory simulation of the store after being separated from the mother plane is an advanced and difficult technique in wind tunnel test. In this paper, the continuous dynamic trajectory simulation technique is studied in the Captive Trajectory System (CTS) used in a transonic wind tunnel. This paper initially introduces the dynamic trajectory predicting principle. Then, the specific steps of the coordinated control method of continuous dynamic trajectory simulation are amply described. The algorithm and constraint condition of the coordinated control and the buffering coordinated control are also discussed. Finally, the Taylor mean value theorem is applied to build a Kalman filtering model to resolve the conflict between filtering delay and accuracy requirements. After choosing appropriate parameter, the Kalman filtering is used to process the balance signal dynamically and in real time, and the comparison between the continuous dynamic control process and the move-and-stop control process is carried out. The wind tunnel CTS test result shows that the Kalman filtering can reduce the signal fluctuation greatly, meet the real-time requirements of CTS, and dynamic separation trajectory of the continuous dynamic control process metches well with the one of the move-and-stop cortrol, while the wind tunnel CTS test efficiency has also been considerably improved. transonic wind tunnel;captive trajectory system;continuous;dynamic;Kalman filtering 1672-9897(2015)01-0103-06 10.11729/syltlx20120029 2013-03-03; 2014-04-10 WangF,ZhuRS,ZhangJS.ApplicationofKalmanfilteringincontinuousdynamictrajectorysimulationtechniqueofthecaptivetrajectorysystemusedinatransonicwindtunnel.JournalofExperimentsinFluidMechanics, 2015, 29(1): 103-108. 王 飛, 祝汝松, 張俊生. 卡爾曼濾波在某跨聲速風洞CTS機構連續動態軌跡捕獲試驗技術中的應用. 實驗流體力學, 2015, 29(1): 103-108. V211.73 A 王 飛(1982-),男,碩士,江蘇阜寧人,主要從事風洞測控系統設計、開發與研究。通信地址:四川省綿陽市二環路南段6號設備設計及測試技術研究所403室(621000)。E-mail:wfei_fancy@163.com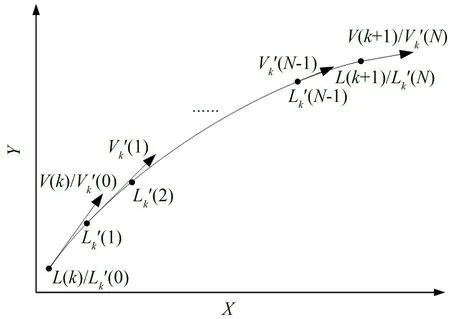


3 天平信號的實時濾波








4 試驗結果

5 結 論

猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36