基于模糊小波神經(jīng)網(wǎng)絡(luò)的四旋翼飛行器魯棒自適應(yīng)控制
2015-06-26 12:12:27林文長沙航空職業(yè)技術(shù)學(xué)院湖南長沙410124
長沙航空職業(yè)技術(shù)學(xué)院學(xué)報 2015年4期
關(guān)鍵詞:模型
林文(長沙航空職業(yè)技術(shù)學(xué)院,湖南長沙410124)
基于模糊小波神經(jīng)網(wǎng)絡(luò)的四旋翼飛行器魯棒自適應(yīng)控制
林文
(長沙航空職業(yè)技術(shù)學(xué)院,湖南長沙410124)
針對四旋翼飛行器的飛行控制問題,提出了一種基于模糊小波神經(jīng)網(wǎng)絡(luò)的魯棒自適應(yīng)滑模控制方法。首先利用牛頓-歐拉方程得到四旋翼飛行器的動力學(xué)模型,然后用模糊小波神經(jīng)網(wǎng)絡(luò)在線逼近系統(tǒng)中的外部擾動和未建模不確定動力學(xué)特性,最后提出魯棒自適應(yīng)滑模控制算法,通過Lyapunov穩(wěn)定性理論證明了整個飛行控制系統(tǒng)的穩(wěn)定性。仿真和實驗結(jié)果驗證了所提出控制方法對外界干擾和模型的不確定性具有較好的魯棒性和自適應(yīng)性。
四旋翼飛行器;模糊小波神經(jīng)網(wǎng)絡(luò);魯棒自適應(yīng)控制;位置和姿態(tài)
近幾年以來,小型無人飛行器已經(jīng)逐漸用于軍事偵查、空中搜救、地圖測繪等諸多領(lǐng)域。相較于固定翼無人飛行器,四旋翼飛行器具相對簡單的機械結(jié)構(gòu),對起飛和著陸條件要求低,靈活性好,具有良好的垂直起降能力,在復(fù)雜地形環(huán)境或者狹小空間中具有更強的適應(yīng)性。四旋翼飛行器通過改變其螺旋槳的速度來完成各種飛行動作,但是四旋翼飛行器是典型多輸入多輸出,強耦合動態(tài)非線性系統(tǒng),具有4個輸入,即4個電機轉(zhuǎn)速;6個輸出量,即垂直、前后、左右等3個位置和橫滾、偏航、俯仰等3個姿態(tài),與此同時,在飛行過程中,容易受到風(fēng)速風(fēng)向、空氣阻力、陀螺效應(yīng)和重力等不確定性影響,精確的動力學(xué)模型很難建。因此,四旋翼飛行器的建模與控制一直是理論和應(yīng)用研究的熱點問題[1-4]。
針對這個問題,眾多研究者進行了大量的探索。文獻5運用牛頓-歐拉方程得到四旋翼飛行器的動力學(xué)方程,并基于飽和分離和多智能體一致性算法設(shè)計了飛行控制器;文獻6基于拉格朗日動力學(xué)建模方法得到了四旋翼飛行器的動力學(xué)模型,文獻7則建立了基于四旋翼飛行器物理模型的LQR狀態(tài)方程和基于RBF-ARX逼近模型的預(yù)測控制器。目前,四旋翼飛行器的控制方法主要有PID控制[8]、反步控制[9]、滑模控制[10]、魯棒控制[11]、自適應(yīng)控制[12]、智能控制[13]等方法。其中自適應(yīng)控制與智能控制因為具有參數(shù)自調(diào)整功能和學(xué)習(xí)能力而容易與其他控制方式結(jié)合得到廣泛應(yīng)用。文獻14針對四旋翼飛行器的姿態(tài)控制問題,提出了一種自適應(yīng)魯棒滑模控制方法,對四旋翼飛行器實現(xiàn)了雙環(huán)控制,其中內(nèi)環(huán)使用自適應(yīng)魯棒滑模控制方法實現(xiàn)姿態(tài)控制,外環(huán)使用魯棒控制方法完成位置控制。文獻15提出了基于自適應(yīng)優(yōu)化控制方法的四旋翼飛行器飛行控制系統(tǒng),實現(xiàn)了姿態(tài)穩(wěn)定和位置控制。文獻16將姿態(tài)控制系統(tǒng)分成了3個二階子系統(tǒng),運用反演控制方法對每一個子系統(tǒng)分別設(shè)計控制器,然后利用自適應(yīng)控制律引入積分項,從而補償模型誤差,提高系統(tǒng)對外界干擾和系統(tǒng)不確定性的魯棒性。文獻17運用魯棒反演滑模控制器結(jié)合自適應(yīng)RBF神經(jīng)網(wǎng)絡(luò)來控制同軸8電機旋翼飛行器,改進了其魯棒性能和抗干擾能力,簡化了控制結(jié)構(gòu),取得了較好的姿態(tài)控制效果。然而,上述控制方法仍然存在種種問題,比如需要精確的數(shù)學(xué)模型或者需要大量的傳感器和觀測器,計算較為復(fù)雜,系統(tǒng)響應(yīng)實時性較差等,難以進入實際應(yīng)用。
鑒于以上問題,在前期研究基礎(chǔ)上將魯棒自適應(yīng)滑模控制與模糊小波神經(jīng)網(wǎng)絡(luò)結(jié)合起來設(shè)計四旋翼飛行器飛行控制系統(tǒng),利用神經(jīng)網(wǎng)絡(luò)強大的非線性逼近能力來在線自適應(yīng)處理系統(tǒng)不確定性,對于控制模型精度的依賴性較小,控制結(jié)構(gòu)簡單。
1 系統(tǒng)模型
四旋翼飛行器的4只螺旋槳是對稱分布的,其中1號和3號螺旋槳在電機的驅(qū)動下逆時針轉(zhuǎn)動,2號和4號螺旋槳順時針轉(zhuǎn)動,以抵消每個螺旋槳產(chǎn)生的反扭矩。首先給出基本坐標(biāo)系與相關(guān)參數(shù)的表示符號,根據(jù)圖1所示,定義坐標(biāo)系P= {OExEyEzE}為大地坐標(biāo)系,Q={OBxByBzB}為機體坐標(biāo)系,四旋翼繞機體做坐標(biāo)系旋轉(zhuǎn)用歐拉角Φ =[φ,θ,ψ]T表示,其中φ為橫滾角,繞xB旋轉(zhuǎn),θ為俯仰角,繞yB旋轉(zhuǎn),ψ為偏航角,繞zB軸旋轉(zhuǎn),φ =[φ1,φ2,φ3,φ4]T表示各個旋翼轉(zhuǎn)速。

圖1 四旋翼飛行器動力學(xué)示意圖
1.1 四旋翼飛行器的動力學(xué)模型
由旋翼動力學(xué)可知,定義F=[F1,F(xiàn)2,F(xiàn)3,F(xiàn)4]T為四個旋翼升力,與旋翼轉(zhuǎn)速φ的平方成正比,于是有

所以根據(jù)牛頓-歐拉方程同時考慮空氣阻力,有


變換可得到

則考慮動力學(xué)不確定性和外界隨機干擾的動力學(xué)模型為

1.2 四旋翼飛行器的運動姿態(tài)模型
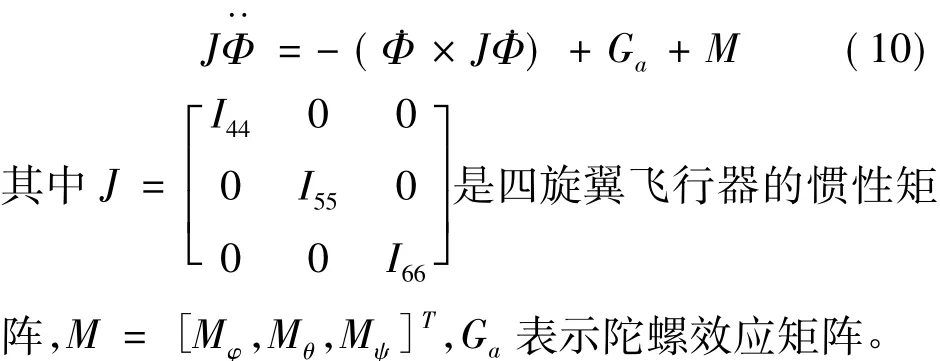
定義ω=[ω1,ω2,ω3]T為機體坐標(biāo)系角速度,則有

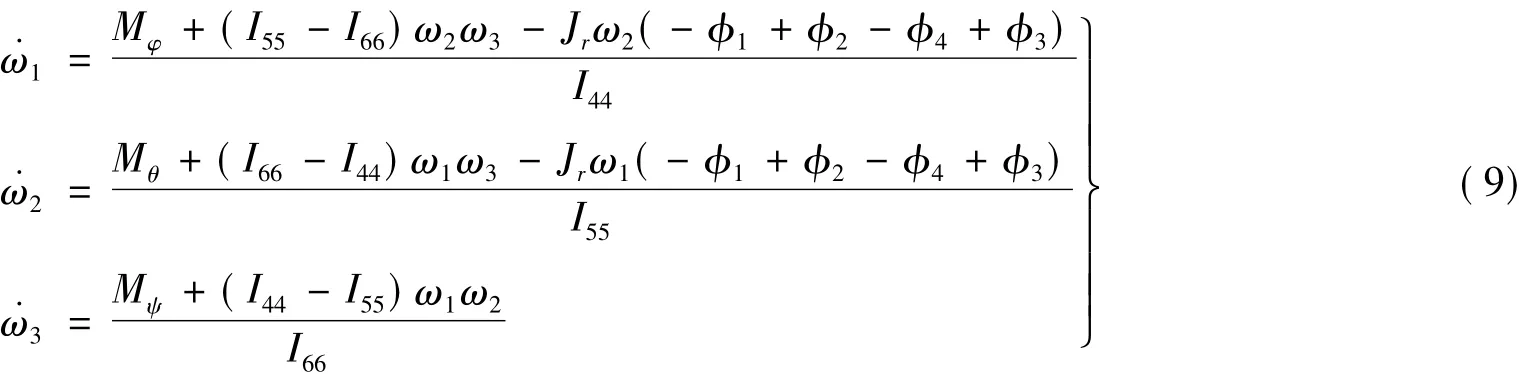
式中,l為機體幾何中心到任意旋翼中心的距離,I44,I55,I66分別表示四旋翼飛行器對于機體坐標(biāo)系xb,yb,zb軸的轉(zhuǎn)動慣量,Jr為旋翼的轉(zhuǎn)動慣量,(I55-I66)ω2ω3,(I66-I44)ω1ω3,(I44-I55)ω1ω2為機體陀螺效應(yīng),旋翼陀螺效應(yīng)表示為Jrω2(-φ1+φ2-φ4+φ3),Jrω1(-φ1+φ2-φ4+φ3)。λ是與空氣密度、旋翼半徑、旋翼截面及旋翼形狀等因素相關(guān)的系數(shù)。
定義Mφ=l(F4-F1)為產(chǎn)生橫滾角的一組旋翼產(chǎn)生的合力矩,Mθ=l(F2-F3)為產(chǎn)生俯仰角的一組旋翼產(chǎn)生的合力矩,Mψ=λ(F1+F4-F2-F3)通過調(diào)節(jié)旋翼轉(zhuǎn)速產(chǎn)生的與升力成正比的偏航力矩。則將公式(7)代入公式(8)經(jīng)變換得到四旋翼飛行器的姿態(tài)運行模型
轉(zhuǎn)化成狀態(tài)方程形式為
2 模糊小波神經(jīng)網(wǎng)絡(luò)
模糊小波神經(jīng)網(wǎng)絡(luò)是小波神經(jīng)網(wǎng)絡(luò)和模糊邏輯結(jié)合起來,不僅能夠利用人類專家的語言控制規(guī)則來訓(xùn)練小波神經(jīng)網(wǎng)絡(luò),而且可以用語言規(guī)則的形式表達小波神經(jīng)網(wǎng)絡(luò)內(nèi)部知識,同時根據(jù)語言控制規(guī)則給神經(jīng)網(wǎng)絡(luò)各個參數(shù)賦初始值。其節(jié)本結(jié)構(gòu)如圖2所示,共分為5層,分別是輸入層、小波函數(shù)層、模糊推理層、去模糊化層和輸出層。每一層的輸入輸出關(guān)系為:
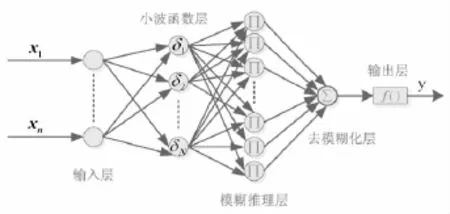
圖2 模糊小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
輸入層:作用是引入網(wǎng)絡(luò),每個輸入的論域為[-1,1],則

其中xi表示網(wǎng)絡(luò)的第i個輸入。
小波函數(shù)層:輸入輸出關(guān)系為

采用小波基函數(shù)作為隸屬函數(shù),本文采用的小波基函數(shù)為


模糊推理層:輸入輸出關(guān)系為

輸入采用乘法代替極小運算,推理規(guī)則如下:規(guī)則j(j=1,2,L,N):如果x1是Aj1且L且xn是Ajn,那么σ1=w1jgj1(x1)Lgjn(xn)且L且σm= wmjgj1(x1)Lgjn(xn)。針對本文,給出示例如表1。
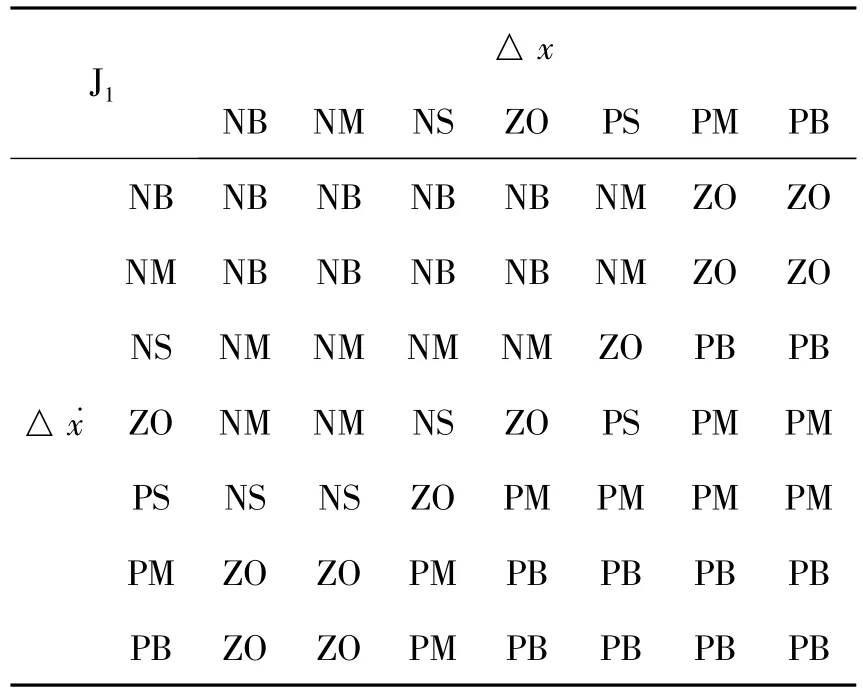
表1 位置變量x的模糊規(guī)則表
去模糊化層:輸入輸出關(guān)系為
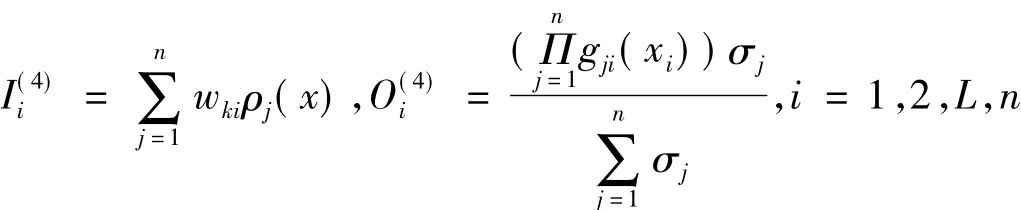

WT=[是m×N維權(quán)值矩陣。
相較于BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)的補償能力,模糊小波神經(jīng)網(wǎng)絡(luò)達到的效果更好。所以存在模糊小波神經(jīng)網(wǎng)絡(luò)的一個實值矩陣W*和實向量,使得

式(10)中,ε(x)為一個有界的誤差向量,由于權(quán)值矩陣W*,伸縮因子ˉω*,和平移因子c*都是未知的,因此定義它們的估計值為^Wω—^^c,得到模糊小波神經(jīng)網(wǎng)絡(luò)的估計函數(shù)為:

則估計誤差為

3 控制律設(shè)計
3.1 四旋翼飛行器的位置控制
本文的目標(biāo)就是找到一個合適的飛行控制器來控制四旋翼飛行器的位置和姿態(tài),首先我們來設(shè)計位置控制器。
定義四旋翼飛行器的位置誤差為


其中qd表示飛行器的期望位置軌跡,且是連續(xù)可微的,所以定義滑模函數(shù)為其中Λ為正定對角矩陣,根據(jù)公式(5)和(6),四旋翼飛行器的動力學(xué)可轉(zhuǎn)化為

其中f是未知的非線性函數(shù),且f=mΛe+k1Λe+f
則設(shè)計的位置控制律為

其中K=KT>0為正定矩陣,^f是f的估計向量函數(shù),P為正定矩陣,^d為魯棒擾動且滿足如下等式:

根據(jù)(15)可得到

同時定義模糊小波神經(jīng)網(wǎng)絡(luò)權(quán)值滿足如下自適應(yīng)控制律:
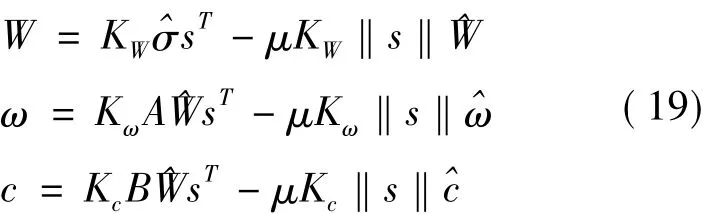
其中μ>0,KW,Kω,Kc都是正定對角矩陣。則四旋翼飛行器的位置控制有以下結(jié)論成立:
(1)隨著K的逐漸增長,系統(tǒng)的跟蹤誤差會越來越小;
(2)通過選擇位置控制器F,誤差滑模變量s(t)和模糊小波神經(jīng)網(wǎng)絡(luò)權(quán)值W^,ω^,^c是一致最終有界的;
(3)位置控制器(16)保證了四旋翼飛行器位置控制系統(tǒng)是魯棒漸近穩(wěn)定的。
證明如下:
定義如下Lyapunov函數(shù)

將得到(20)的微分
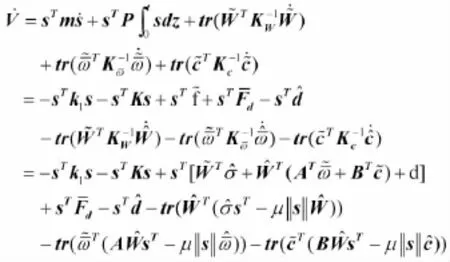
根據(jù)矩陣的跡、內(nèi)積和弗洛賓尼斯準(zhǔn)則,有下列等式:
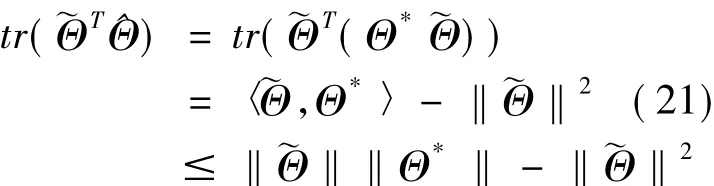
則(20)可轉(zhuǎn)變?yōu)?/p>
其中Kmin是矩陣K的最小特征值,

3.2 四旋翼飛行器的姿態(tài)控制
為了便于設(shè)計姿態(tài)控制器,給出如下假設(shè):
假設(shè)1:四旋翼飛行器系統(tǒng)的所有狀態(tài)都是可測量的,且測量誤差有界,期望姿態(tài)Φd關(guān)于時間連續(xù)可微且有界。
定義四旋翼飛行器姿態(tài)Φ與期望姿態(tài)Φd之間的誤差為
式中η為未建模誤差和不確定性,采用模糊小波神經(jīng)網(wǎng)絡(luò)進行逼近,即令η=(x,ωz,cz)+ε。
設(shè)計的控制律如下:

其中г為正定參數(shù)矩陣。^W1是模糊小波神經(jīng)網(wǎng)絡(luò)的權(quán)值矩陣估計值,ε為逼近誤差,r是為消除逼近誤差引起的對系統(tǒng)性能的影響而設(shè)計的魯棒項。選擇如下模糊小波神經(jīng)網(wǎng)絡(luò)權(quán)值自適應(yīng)控制律:
這里模糊小波神經(jīng)網(wǎng)絡(luò)的逼近誤差可表示為

下面證明設(shè)計控制律的穩(wěn)定性。
證明:選擇如下Lyapunov函數(shù)
則(27)求導(dǎo)得到

根據(jù)(21)得到
гmin是г的最小特征值,設(shè)計魯棒項

根據(jù)以上分析可知,所設(shè)計的四旋翼飛行器的飛行控制系統(tǒng)的結(jié)構(gòu)如圖3所示。
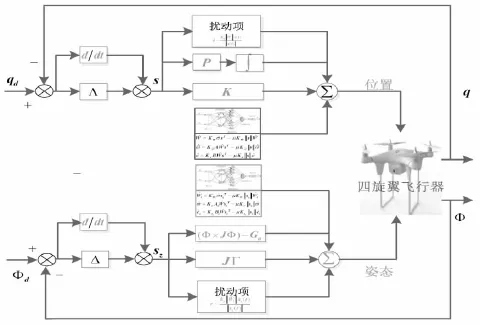
圖3 四旋翼飛行器飛行控制系統(tǒng)結(jié)構(gòu)圖
4 仿真和實驗
4.1 仿真結(jié)果
將所設(shè)計的基于模糊小波神經(jīng)網(wǎng)絡(luò)的飛行控制系統(tǒng)用于四旋翼飛行器,實現(xiàn)其自主飛行,首先在Matlab中進行了四旋翼飛行器的控制仿真實驗,并在有外界干擾和不確定性和無外界動態(tài)干擾和不確定性條件下進行了對比試驗,仿真模型的參數(shù)如表2所示。
在仿真中,位置控制器選用的參數(shù)為
K=diag([1,2.56,3.24]),P=diag([3.5,2.78,4.27]),Kd=diag([0.6,0.6,0.6]),初始位置為(0,0,0)圖4(a-c)反映了位置控制的仿真結(jié)果,從圖中可以看出,所提出的四旋翼飛行器位置控制系統(tǒng)能夠較好的抑制不確定性和外界干擾,具有較強的自適應(yīng)性和魯棒性。
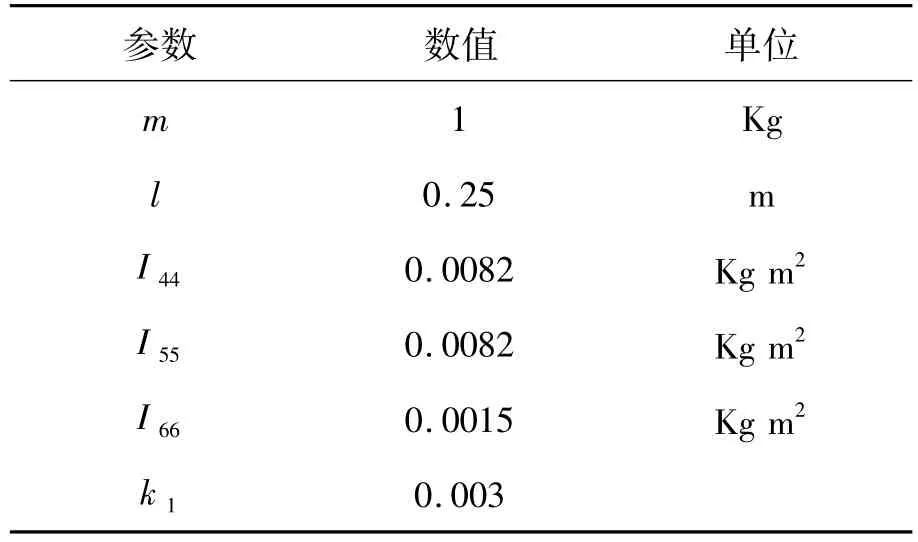
表2 仿真模型參數(shù)
姿態(tài)控制選用的控制參數(shù)如下:
г=diag[1.46,2.78,3.47],kz=diag[0.8,0.8,0.8]。圖5表示四旋翼飛行器的姿態(tài)效果。
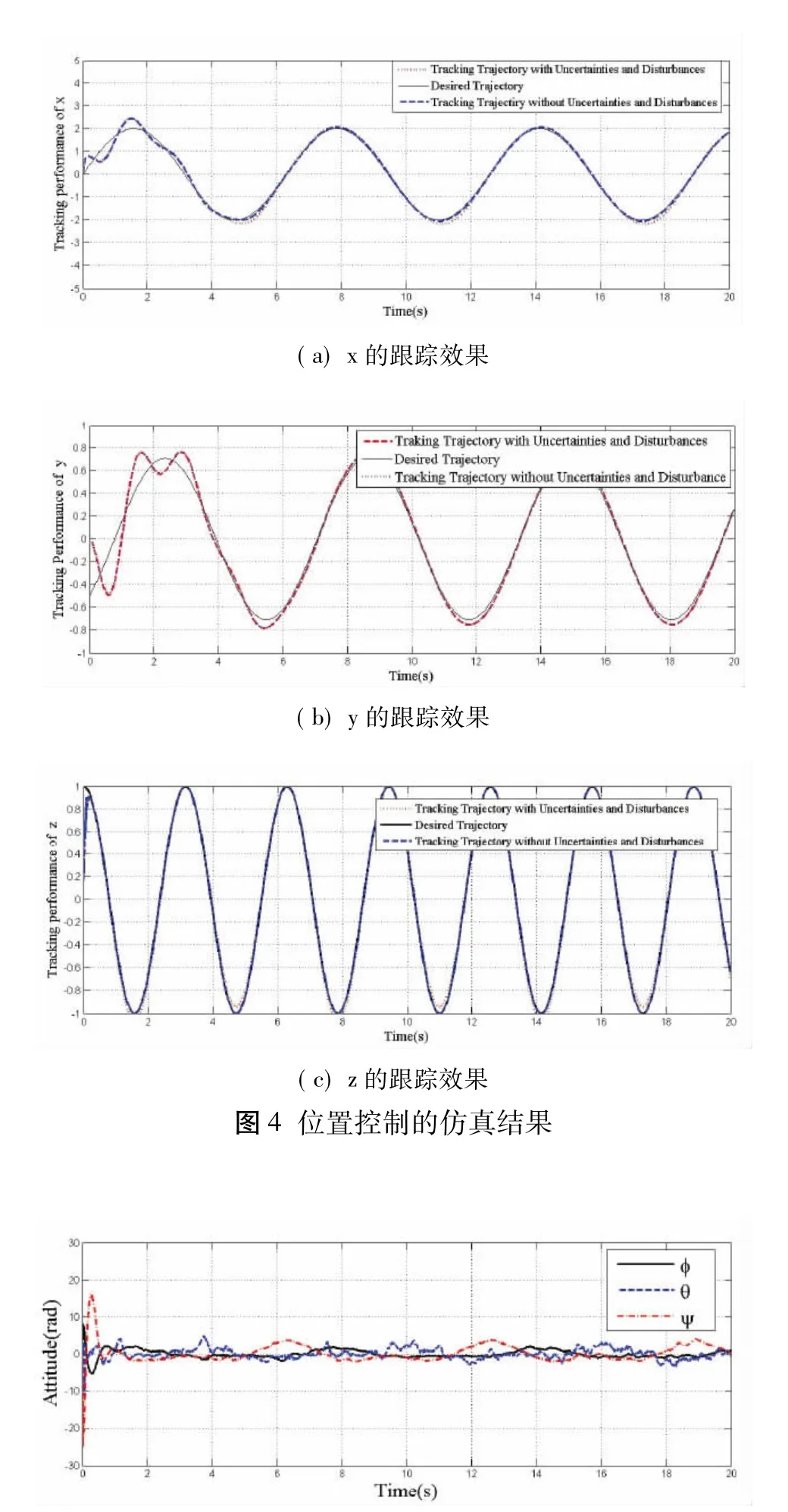
圖5 姿態(tài)控制的仿真結(jié)果
綜合圖4和圖5可以看出,所提的基于模糊小波神經(jīng)網(wǎng)絡(luò)的四旋翼飛行器自適應(yīng)控制系統(tǒng)可以保證飛行器平穩(wěn)飛行。
4.2 實驗結(jié)果
所使用的實驗設(shè)備如圖6所示。

圖6 實驗設(shè)備
飛行器采用十字形模型,對角尺寸為12.4cm,重量為4Kg,上面安裝有三維加速度傳感器和陀螺儀,分別用于測量角度和角速度。試驗用參數(shù)如下:

圖7反應(yīng)了所設(shè)計控制器的位置跟蹤三維性能,圖8(a-c)反映了姿態(tài)控制效果。
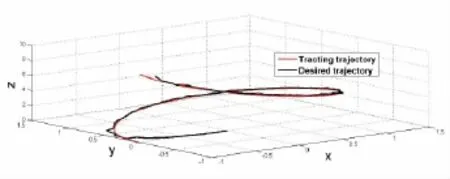
圖7 位置控制的實驗結(jié)果
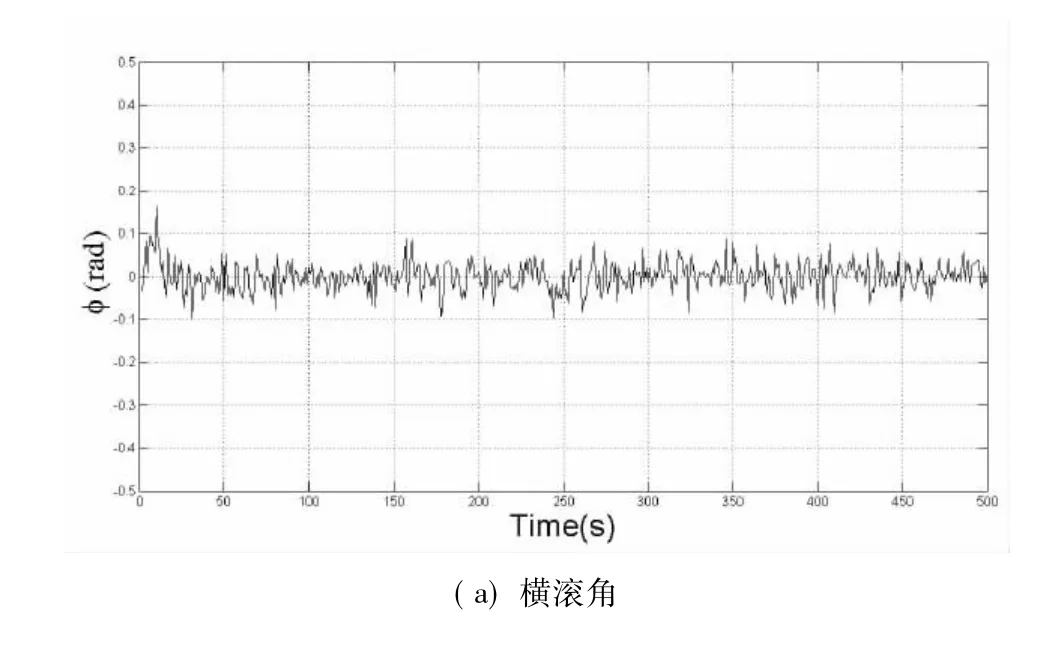
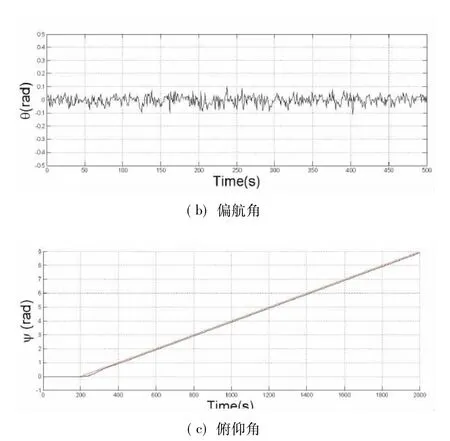
圖8 姿態(tài)控制的實驗結(jié)果
從圖7和圖8可以得出,所提出基于模糊小波神經(jīng)網(wǎng)絡(luò)的四旋翼飛行器自適應(yīng)飛行控制系統(tǒng)具有較強的自適應(yīng)性和良好的魯棒性。
5 結(jié)論
針對四旋翼飛行器這種非線性、強耦合動態(tài)欠驅(qū)動系統(tǒng),提出了基于模糊小波神經(jīng)網(wǎng)絡(luò)的自適應(yīng)魯棒滑模控制方法,該方法不需要精確的系統(tǒng)模型,能夠有效克服四旋翼飛行器建模中的不確定性因素和飛行過程中空氣阻力、風(fēng)力風(fēng)向等外界干擾,能夠自適應(yīng)的改變控制參數(shù)。仿真和實驗結(jié)果有效的證明了該控制方法的穩(wěn)定性,具有良好的動態(tài)和穩(wěn)態(tài)性能,能夠有效克服系統(tǒng)干擾和不確定性,保證飛行器自主穩(wěn)定飛行,具有較強的魯棒性。
[1]Tayebi A,Mcgilvray S.Attitude stabilization ofa four rotor aerial robot aerial robot[C].IEEE Conference on Decision&Control.Atlantis,Bahamas,2004.
[2]Voos H.Nonlinear state-dependent Riccati equation control of a quad-rotor UAV[C].Proc IEEE Int Conf Control Appl.Munich,Germany,2006.
[3]Zuo Z.Trajectory tracking control design with command-filtered compensation for a quad-rotor[J].IET Control Theory Applications,2010,(11).
[4]Efe M.Neural Network assisted computationally simplePID control of a quad-rotor UAV[J].IEEE Trans on Industrial Informatics,2011,(2).
[5]BOUABDALLAH S.Design and control of quad-rotors with applications to autonomous flying[D].Ecole Polytechnique Federale de Lausanne,2007.
[6]Castillo P,Lozano R.Modeling and control of miniflying machines[M].London:Springer,2005.
[7]曾小勇,彭輝,吳軍.四旋翼飛行器的建模與姿態(tài)控制[J].中南大學(xué)學(xué)報(自然科學(xué)版),2013,(9).
[8]Salih A L,Moghavveni M,et al.Flight PID controller design for a UAV quad-rotor[J].Scientific Research and Essays,2010,(23).
[9]Yu Yali,Jiang Changhong,etal.Back-stepping control of each channel for quad-rotor aerial robot[C].International Conf.on Computer,Mechatronic,Control and E-lectronic Engineering,ChangChun,China,2010.
[10]Besnard L,Shtessel Y B,et al.Quad-rotor vehicle control via sliding mode controller driven by sliding mode disturbance observer[J].Journal of the Franklin Institude-engineering and Applied Mathematics,2012,(2).
[11]Erginer B,Altug E.Design and implementation ofa hybrid fuzzy logic controller for quad-rotor VTOL vehicle[J].International Journal of Control,Automation and Systems,2012,(1).
[12]孫秀云,方勇純,孫寧.小型無人直升機的姿態(tài)與高度自適應(yīng)反步控制[J].控制理論與應(yīng)用,2012,(3).
[13]ALTUG E,OSTROWSKI JP,TAYLOR C J.Quadrotor control using dual camera visual feedback[C].2003 IEEEInternational Conference on Robotics and Automation.Taipei,China.
[14]林旭梅,王嬋.四旋翼飛行器的自適應(yīng)魯棒滑模控制器設(shè)計[J].儀器儀表學(xué)報,2015,(7).
[15]馬正華,張倩倩,陳嵐萍.四旋翼飛行器的自適應(yīng)反演姿態(tài)控制[J].智能系統(tǒng)學(xué)報,2015,(3).
[16]李勁松,楊爍,王樂天.小型四旋翼飛無人直升機自適應(yīng)優(yōu)化控制[J].上海交通大學(xué)學(xué)報,2015,(2).
[17]Cheng Peng,Yue Bai,Xun Gong,et al.Modeling and robust backstepping sliding mode control with adaptive RBFNN for a novel coaxial eight-rotor UAV[J].IEEE/CAA Journal of Automatica Sinica,2015,(1).
[編校:張芙蓉]
Robust Adaptive Control of Quad-rotor Aircraft Based on Fuzzy W avelet Neural Network
LINWen
(Changsha Aeronautical Vocational and Technical College,Changsha Hunan 410124)
Aiming at the flight control issue of quad-rotor aircrafts,a robust adaptive control approach is presented based on fuzzy wavelet neural network and slidingmode control theory.First of all,the Newton-Euler equation is used to establish the dynamic model of quad-rotor aircrafts,and then by utilizing the fuzzy waveletneural network to approximate the external disturbance and unmodeled dynamic characteristic in the system,a robust adaptive slidingmode control algorithm is proposed at last.Based on Lyapunov stability theory,the stability of whole flight control system is strictly guaranteed.Moreover,simulation and experiment results validate the proposed controlmethod has superior robustness and adaptiveness for external disturbance and model uncertainty.
quad-rotor aircraft;fuzzy wavelet neural network;robust adaptive control;position and attitude
V249.122+.2
A
1671-9654(2015)04-030-09
2015-11-17
林文(1982-),女,山東文登人,講師,工學(xué)碩士,研究方向為自動控制、高職教育教學(xué)管理。
本文為湖南省教育廳科學(xué)研究項目“空中機器人智能魯棒自主控制方法研究”(編號:13C993)階段性研究成果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19