基于航空測量試驗的數據獲取與處理方法探討
2015-06-29 12:10:58吳寄托
科技資訊 2015年11期
吳寄托
摘 要:該文以POS輔助航空攝影測量和內業數據處理為研究對象,首先分析了POS的工作原理,進而探討了以廣東某地區航攝測量為背景的POS輔助航攝測量試驗,論文詳細探討了整個試驗的流程和方法,給出了試驗結論,相信對從事相關工作的同行能有所裨益。
關鍵詞:POS 航空攝影測量 輔助 試驗 RC-30
中圖分類號:P231 文獻標識碼:A 文章編號:1672-3791(2015)04(b)-0011-02
機載POS系統集GPS技術與慣性導航技術于一體,使準確地獲取航攝相機曝光時刻的外方位元素(GPS測量得到位置參數,慣性導航系統得到姿態參數)成為可能,從而實現了無(或少量)地面控制點,甚至無需空中三角測量加密工序,即可直接定向測圖,從而大大縮短航空攝影作業周期、提高生產效率、降低成本。因此,POS系統的出現,將從根本上改變傳統航空攝影的方法,進而引起航空攝影理論與技術的重大飛躍。隨著計算機技術的發展及其慣性、GPS器件精度水平的提高,POS無論定位定向精度還是實時數據處理能力都會有質的提高,將會在航空攝影測繪方面發揮越來越重要的作用。POS系統高精度定位定向技術是POS系統應用的關鍵技術,它的研究可以極大的推動POS系統的發展。
1 POS工作原理
IMU慣性測量單元最大優點是不依賴于任何外界信息,能夠進行完全自主的導航。慣性測量單元能夠連續長時間的工作,可以提供多種導航信息如位置、速度、航程、航向,還可以提供水平及方位基準,精度較高。但是,慣性測量單元的精度主要取決于慣性器件(陀螺儀和加速度計)的精度,并且其定位誤差隨時間積累,精度逐漸降低,這對于需要長時間工作的情況是極為不利的。而且其初始對準時間長,所以想到利用其它定位手段作為參考信息源,定期或不定期地對慣性測量單元進行綜合校正,對慣性器件的漂移進行補償。
GPS衛星導航系統具有定位精度高的特點,而且能夠進行全球、全天候、全天時、多維連續定位,其精度不隨時間變化。然而,GPS是非自主式的系統,不能提供諸如載體姿態等參數,運動載體上的GPS接收機不易捕獲和穩定跟蹤衛星信號,動態環境造成中信噪比下降。這些原因都容易產生周跳。而且由于GPS信號在傳播途中的干擾,使得系統定位精度有所下降,定位結果較為離散。如上所述,GPS和IMU慣性測量單元各有所長,具有可互補的特點,兩者的組合不僅具有兩個獨立系統各自的主要優點,而且隨著組合水平的提高,它們之間信息傳遞、融合、使用的加強,組合系統的總體性能要遠優于任一獨立系統。組合導航把無線電導航長期精度高與慣性測量短期精度高和不受干擾的優點結合起來,因而GPS與IMU的組合被認為是目前導航領域最理想的組合方式。
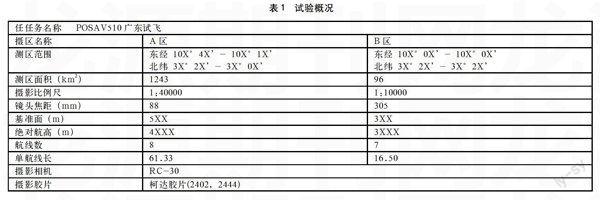
2 試驗概況
POSAV510輔助RC30相機在2006年廣東地區進行了兩次試驗飛行。根據試驗的目的和技術要求,結合實際工作的需要選定試驗測區。測區內分布有水系河流、城鎮市區、山區和主要交通道路等典型地形地貌,較有利于對設備精度的評估。選擇了1:10000和1:40000兩個攝影比例尺。如表1所示。
3 試驗區控制點的布設
為了對POS的精度作出客觀的評估,在廣東某試驗區內根據《GB/T13977-921:5000、1:10000地形圖航空攝影測量外業規范》、《GB/T13990-92 1:5000、1:10000地形圖航空攝影測量內業規范》、《P0S/TRACKER系統應用航空攝影試飛方案》技術設計書進行試驗區控制點布設。
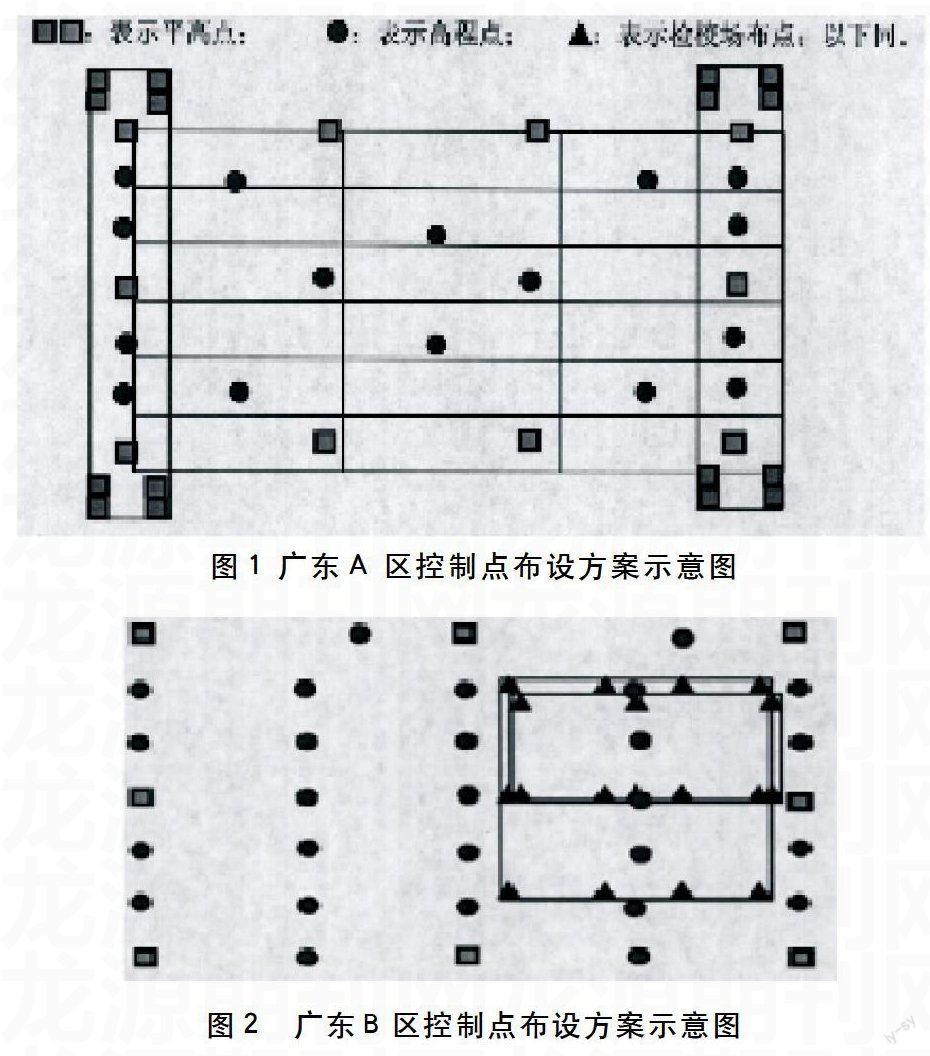
3.1 A區控制點布設方案
根據《POS/TRACKER系統試驗區航空攝影技術設計書》要求,A區范圍覆蓋6幅(3x2)1:50000地形圖。依據關于1:50000比例尺成圖丘陵地和山地的區域網布點及構架航線的布點要求,A區控制點布設如圖1所示。
3.2 B區控制點布設方案
根據《POS/TRACKER系統試驗區航空攝影技術設計書》要求,B區范圍覆蓋2幅(1*2)1:10000地形圖。關于1:10000比例尺成圖平地的區域網布點要求,同時結合檢校場控制點布設要求。B區控制點布設如圖2所示。
為了提高量測精度,在像片上更準確地判別出控制點的位置,該次試驗在B區采用了先布控后飛行的方法。根據控制點周圍的環境情況,對B區100km2內的42個控制點分別用埋石、砸木樁及鐵釘的方法將控制點標記到位,其中大標石6個(預計作為檢校場控制點永久保留)、小標石11個、木樁19個、鐵釘6個。為了使控制點在像片上容易判別,飛行前對測區100km2內的42個控制點進行標志布設。根據控制點的情況,采用lm×lm的標志布和刷漆等辦法,在飛機起飛前將標布設到位。
4 基準站布設
為保證POS輔助航空攝影飛行,需要在測區內布設基準站。考慮到基準站觀測數據備份和檢核,根據測區大小和試驗為中、小比例尺航攝的特點,按照GB/T18314與GJB2228-1994規定的GPS基準站選址原則,結合已知大地測量控制成果,并經過現場踏勘,在攝區內布設1個地面GPS基準站。同時為了驗證基準站距離對測量精度的影響,在寶雞(距測區約200公里)和鄭州(距測區約500公里)地區分別布設長基線和超長基線GPS基準站。
5 航攝飛行
根據《POS/TRACKER系統試驗區航空攝影技術設計書》和《POS/TRACKER系統試驗區航空攝影實施計劃》,共飛行5架次,完成了試驗區1:10000及1:40000的航攝工作,獲取了1:10000、1:40000有效黑白像片323片,l:10000彩色有效像片133片隨后再次完成POS輔助RC30相機B區1:10000飛行。
6 POS外方位元素解算
(l)偏心角解算。在1:10000黑白影像掃描完畢,獲得檢校場像控測量數據以及檢校場空三加密數據后,結合POS原始數據及基準站數據,利用PosPac軟件中的PosGPs、PosPro及CalQc模塊對偏心角進行解算,獲得了305mm鏡頭進行1:10000飛行時的偏心角。同時解算出152mm鏡頭進行1:40000飛行時的偏心角。(2)像片外方位元素的解算。將獲得的偏心角輸入PosPac軟件的PosPEO模塊進行解算,獲得像片的外方位元素EO。
7 空三處理
由于現有的海拉瓦軟件和適普軟件都不支持POS數據的空三處理,因此數據后期的空三解算采用了Leica公司的LPS軟件。在LPS中建立與EO數據坐標相一致的工程,進行了直接定向法和POS輔助空三法兩種方法的試驗。
直接定向法。在LPS中建立工程,輸入試驗區影像,生成縮小片。在自動完成內定向后,在Fiducial orientation and Exterior Orientation Parameter Editor直接輸入EO解算出的外方位元素,將其作為確定值,試驗區的立體即可完全恢復,最終進行精度檢測。POS輔助空三法。前期與直接定向法一致,不過在輸入外方位元素后,將其設為初始值,再按直接定向法檢測出的精度給出一個外方位元素合適的標準方差。進入Orima軟件,通過APM選點,判讀合適的控制點,進行平差解算,最后將結果寫出。退回到LPS中,進行精度檢測。試驗進行了僅有連接點無控制的平差、加入1個控制點的平差、加入4個控制點的平差。
8 POS數據直接定向精度分析研究
在內定向結束后,輸入RC30的POS數據"按照LPS中影像的數據順序,依次將其對應的EO數據拷貝到相應的位置,獲得POSEO數據直接定向的結果。
(1)200X年B區直接定向,精度已經可以滿足1:10000成圖要求;(2)200X年B區直接定向,平面精度可以滿足1:10000成圖要求,但高程精度超限。這是因為我國的外業大地高均為ITRF97或與其相似的框架下的大地高,而我們所采用的EO數據的大地高是初始WGS84的大地高,兩者之間有固定差,在引入一個控制點平差后,高程精度馬上符合精度要求。
9 結語
通過該次課題試驗精度分析,POS輔助RC3相機航攝,在成小于1:10000地形圖時,可采用直接定向的方法。在成1:10000或更大比例尺地形圖時,應采用POS輔助空中三角測量的方法。
參考文獻
[1] 竹林村.幾種低空遙感系統對比分析[J].城市勘測,2009(3):65-67.
[2] 姬淵,秦志遠,等.小型無人機遙感平臺在攝影測量中的應用研究[J].測繪技術裝備,2008,10(4):46-48.
[3] 劉小民.基于全數字攝影測量系統的數字正射影像圖的制作[J].測繪科學,2010,35(4):198-199.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45