一種平面2自由度冗余并聯機構的參數化工作空間分析
2015-06-29 05:46:51郭洪鑫
科技資訊 2015年11期
郭洪鑫
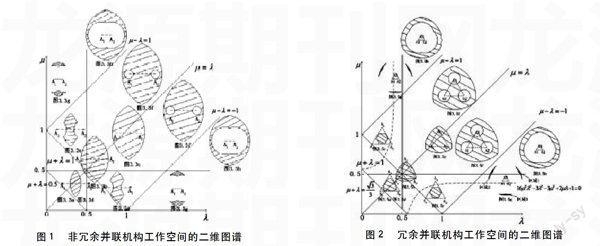
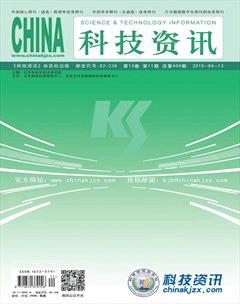
摘 要:該文對組成并聯機構的各組成部分的尺寸參數進行無量綱處理,推導了平面2自由度冗余并聯機構和非冗余并聯機構的結構參數與工作空間的形狀之間的關系。計算出兩者基于無量綱參數的工作空間的二維譜圖。針對是否有工作空間,對非冗余并聯機構而言,機構有工作空間的條件是要滿足安裝條。在二維圖譜中,必須滿足每個有效點都會對應固定的工作空間。對冗余并聯機構而言,有效點需滿足的條,但每個有效點不一定都有對應的工作空間。
關鍵詞:冗余機構 無量綱 工作空間
中圖分類號:TH112 文獻標識碼:A 文章編號:1672-3791(2015)04(b)-0244-01
并聯機構的工作空間分析是并聯機構運動學設計的最主要內容,它能明確指出工作空間的大小和位置,求出末端執行器的可達工作范圍[1]。并聯機構在工作時的最大一個缺點就是工作空間狹小,在機構尺寸相同的情況下,串聯機構的工作空間要遠遠大于并聯機構的工作空間。它主要受到以下方面的條件限制:運動副轉角范圍的限制、各桿之間的干涉限制、桿長的限制和奇異位形曲線的限制[2]。該文忽略各桿的干涉限制問題和奇異位形曲線的限制問題,只研究工作空間形狀和尺寸之間的關系[3]。
1 非冗余并聯機構的工作空間
參考文獻
[1] Stewart D.A Platform with Six Degrees of Freedom.Proceedings of.International Mechanical.Engineering, London,2013,180(15):370-386
[2] M.H.Perng,T.C.Lee,Y.S.Tsai,A systematic design procedure for parallel machine tools regarding mechanical efficiency,stiffness and workspace,The International Workshop on Parallel Kinematics Machines,UCIMU,Milano,2012.
[3] 何景峰.液壓驅動六自由度并聯機器人特性及其控制策略研究[D].哈爾濱:哈爾濱工業大學,2007.