橋式卸船機抓斗的定位和防擺控制
2015-07-02 17:45:22李東童志銀
科技資訊 2015年4期
李東 童志銀
摘 要:格式抓斗卸船機在散貨碼頭中被廣泛應用。不過在整體作業過程中,有諸多因素會引起抓斗搖擺,降低了作業效率和生產安全性。該文對橋式手機抓斗的定位和控制予以分析,通過雙回路控制系統,對小車位置和負載擺各自予以控制,以便能夠為工程實際工作選取合適的控制方法提供一些指導。
關鍵詞:橋式卸船機 抓斗 定位 防擺控制
中圖分類號:U653.928 文獻標識碼:A 文章編號:1672-3791(2015)02(a)-0085-01
橋式抓斗卸船機在散貨碼頭業中得到廣泛的應用。不過卸船機在作業期間,由于小車的速度轉換、抓斗的負載升降和擾動等諸多因素,會造成抓斗出現搖擺現象。抓斗搖擺會很大程度地影響作業效率,加大整臺機子的結構負荷,同時還會影響生產安全性。小車定位和抓斗搖擺控制是實現抓斗卸船機自動運行的主要技術。該文從小車定位和抓斗搖擺兩個方進行分析,設計具有兩個回路的控制系統,對兩者進行控制。
1 卸船機系統簡化數學模型
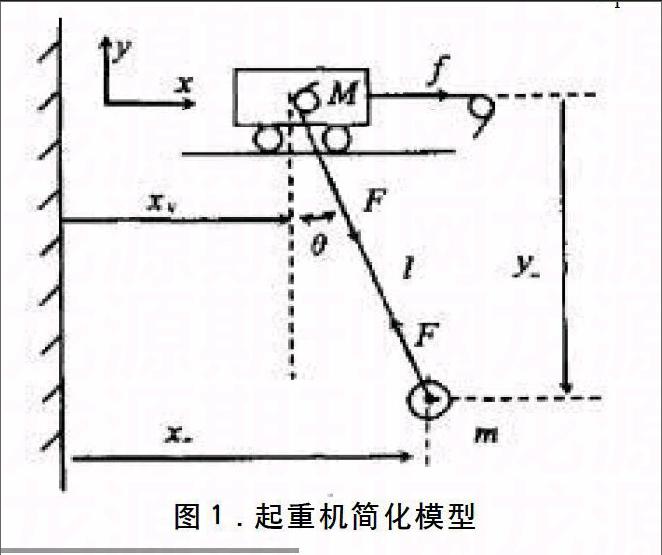
卸船機的簡化模型如圖1所示。
其中,M為小車質量;m為負載質量;θ為懸繩的擺角;l為懸繩的繩長;xM為小車的位移;xm為抓斗的水平方向位移;ym為抓斗的垂直方向位移;xd為抓斗與小車的相對位移;f為小車的牽引力;F為抓斗的牽引力。
假設:
a.小車和負載分別為質點;
b.與小車牽引的摩擦力不予以考慮;
c.懸繩的質量以及其引起的長度變化不予以考慮;
d.空氣阻力不予以考慮;
e.小車和負載運動于x-y平面之上。
系統的控制是為了能夠控制電機驅動小車帶動負載安全的抵達目標位置,而且要求定位準確及負載無擺動,簡單的說就是使xM,和在抵達至目標位置的時候降低為0。
2 控制系統的結構
采用橋式卸船機的線性二次型最優的控制方法,對控制系統的控制性能進行比較和驗證。
2.1 線性二次型最優控制
如果把小車位移xM定義成對目標位置的相對位移,那么就給予控制作用u,依照線性二次型最優控制原理,能夠得到狀態方程的狀態變量為0,實現小車準確抵達目標位置,并且抓斗無擺動。
3 結語
在抓斗卸船機作業的整個過程中,小車的速度轉換、抓斗的負載升降和擾動等諸多因素都會引起抓斗搖擺。抓斗搖擺會很大程度的影響卸船機結構壽命和安全生產。該文對橋式手機抓斗的定位和控制予以分析,通過雙回路控制系統,對小車位置和負載擺各自予以控制,并通過仿真實驗證明了模糊控制方法和常規PID控制方法的可行性,不過仍然需要進一步進行實驗研究。
參考文獻
[1] 宋合川.橋式卸船機抓斗搖擺控制機理與仿真研究[D].上海:上海交通大學,2008.
[2] 朱也夫.抓斗卸船機抓斗軌跡優化及控制策略的研究[D].大連:大連海事大學,2010.
[3] 宋合川,姚振強,張雪萍.橋式卸船機抓斗搖擺數值仿真與控制分析[J].機械設計與研究,2008(2):93-96.
