基于專家PID的直流無刷電機控制系統*
2015-07-05 10:42:12張浩吳新開
電氣傳動自動化 2015年4期
張浩,吳新開
(湖南科技大學信息與電氣工程學院,湖南湘潭411201)
基于專家PID的直流無刷電機控制系統*
張浩,吳新開
(湖南科技大學信息與電氣工程學院,湖南湘潭411201)
摘要:由于直流無刷電機存在時變性、非線性、不確定性、難以建模等特點,采用常規的PID很難達到理想的控制效果。通過專家PID控制理論并結合實踐研究,提出一種高性能的速度控制方案。基于多旋翼飛行器常用的無刷電機轉速控制這一實驗平臺,采用編碼器測速實現無刷電機的閉環控制。無刷電機速度PID控制器的引入,開辟了多旋翼飛行器電機控制和姿態控制的新思路。
關鍵詞:無刷電機測速;非線性;魯棒性;專家PID控制
*全國大學生研究性學習和創新性實驗計劃項目(104-143101)
1 引言
多旋翼飛行器常用的直流無刷電機[1、2]作為驅動平臺,該平臺由STM32F103RBT6的核心控制器[3]、增量式光電編碼器、朗宇無刷電機(2216 1100kV)、好盈天行者無刷電調(40A)、個人計算機、上位機軟件構成,其系統結構框圖如圖1所示。
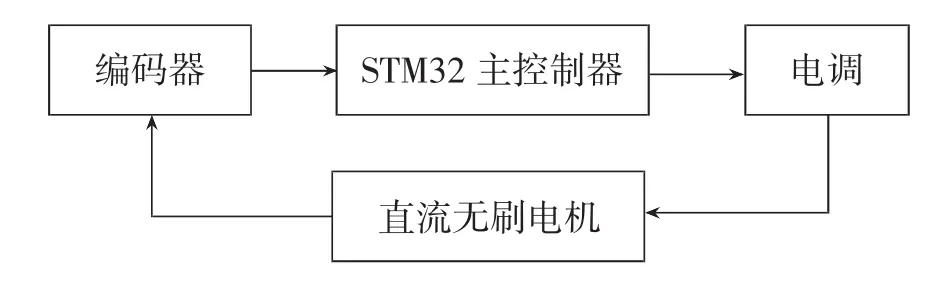
圖1 無刷電機控制系統結構框圖
STM32F103RX系列控制器最高的主頻為72MHz,時間最小分辨達到13.9ns,處理能力1.25 DMIPS/MHz,64K Flash,20K SRAM,擁有3個四通道16位的通用定時器,采用增量式光電編碼器。
無刷電機啟動后的轉速范圍約為50到230 轉/s。其輸入與轉速的曲線圖如圖2所示,橫坐標為驅動信號,縱坐標為轉速,電機轉速和輸入的關系是非線性的[4、5]。
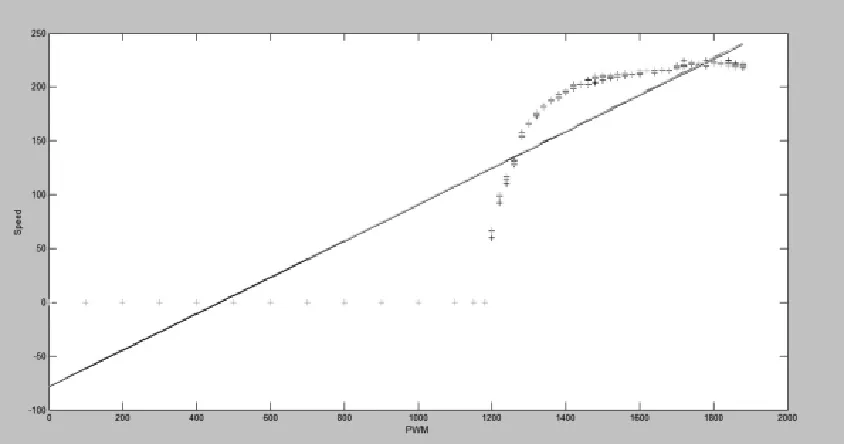
圖2 控制量與電機轉速關系
上位機采用串口方式和控制器進行雙向通信,上位機可以向下位機寫PID等參數,下位機也可以將電機轉速等信息傳到上位機電腦中顯示。
本系統選擇M/T法測速[6]。若PID控制周期為2ms,則采用10線增量式編碼器比較合適。
2 專家控制的基本結構和原理
專家控制(Expert Control)[7、8]是指能夠有效地運用專家積累的有效經驗和專門知識,通過模擬專家的思維過程,在未知的環境下,解決需要專家才能解決的問題。專家控制屬于智能控制的一種[9、10]。專家系統能處理定性的、時變的知識信息,經過各種推理來達到系統的任務目標。專家自適應PID控制器原理圖如圖3所示。專家系統由知識庫和推理機制組成。知識庫包含事實集、經驗數據、經驗公式、規則等。推理機制根據一定的推理策略從知識庫中選擇有關知識,對控制專家提供的控制算法、事實、證據以及實時采集的系統特性數據進行推理,直到得出相應的最佳控制決策。
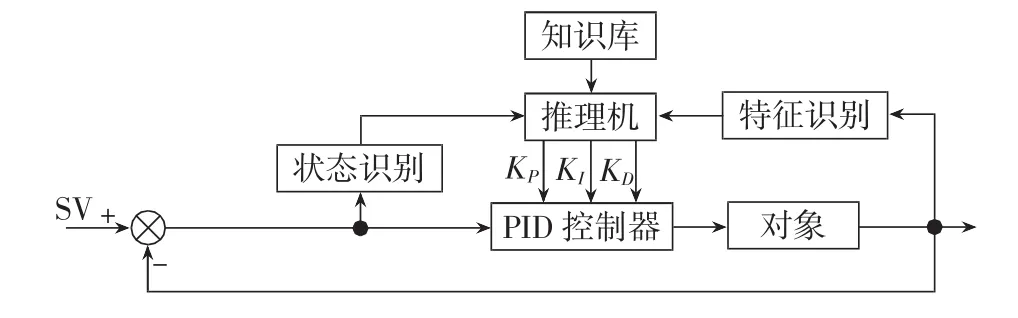
圖3 專家控制系統原理圖
3 控制算法
3.1基于誤差的專家系統
二階系統單位階躍響應曲線如圖4所示。下面通過對該過程的分析,來討論基于專家控制的策略。
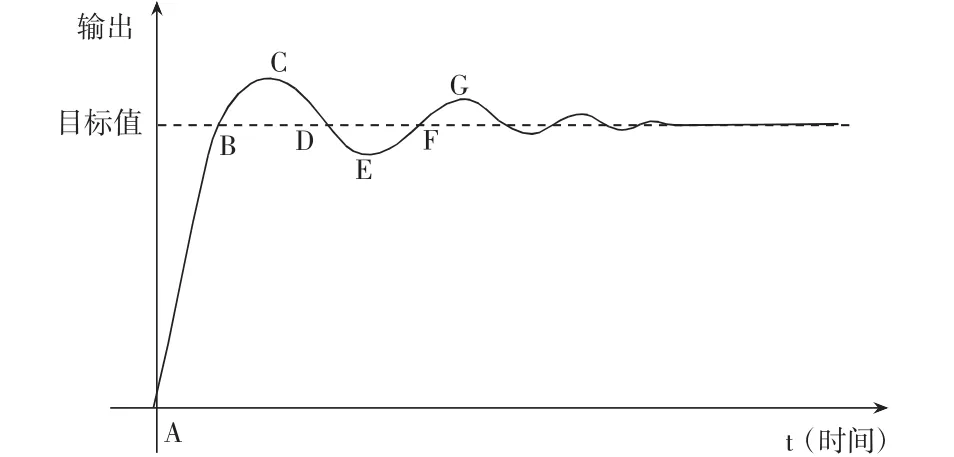
圖4 典型二階系統單位階躍響應誤差曲線
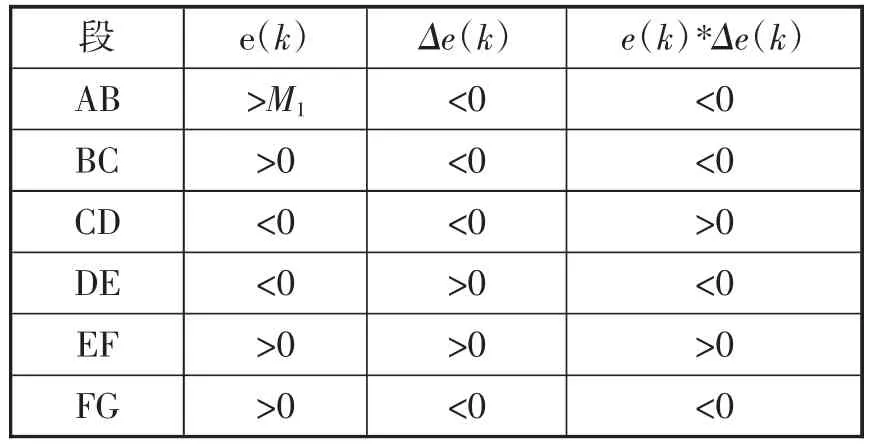
表1 誤差曲線分析表
令e(k)表示當前采樣時刻目標值與測量值的差值,e(k-1)和e(k-2)分別表示前一個和前兩個采樣時刻的誤差值,則有
Δe(k)=e(k)-e(k-1)
Δe(k-1)=e(k-1)-e(k-2)
選取{e(k),Δe(k),Δe(k-1)}為特征量,根據誤差及其變化,可設計專家PID控制器。首先,根據e(k)的所在的區間,可分為三大段:[0, M1],[M1, M2], [M2,∞]。然后,在各大段中分別判斷控制器所處的狀態,實施不同的控制策略。
(1)當e(k)>M2時,說明誤差的絕對值很大。不論誤差變化趨勢如何,都應考慮控制器的輸出應按最大(或最小)輸出,使誤差絕對值以最大速度減小。但是為了防止被控對象由于慣性導致較大超調,所以加入了積分作用。
u(k)=u(k-1)+kp[1e(k)-e(k-1)]+ki1e(k)
(2)M1≤e(k)≤M2情況:
①當e(k)Δe(k)>0,Δe(k)Δe(k-1)>0時,說明誤差在朝誤差絕對值增大方向變化,需要加強積分控制,使其朝誤差絕對值減小方向變化,控制器輸出為:
u(k)=u(k-1)+kp[2e(k)-e(k-1)]+ki2e(k)+kd[2e(k)-2e(k-1)+e(k-2)]
當e(k)Δe(k)>0,Δe(k)Δe(k-1)<0時,說明誤差處于極值狀態,此時誤差的絕對值較大,可考慮實施較強的控制作用:
u(k)=u(k-1)+kp3e(k)
②當e(k)Δe(k)≤0時,說明誤差的絕對值朝減小的方向變化,或者誤差值保持不變。此時,可考慮撤除積分作用,采取較弱的控制作用:
u(k)=u(k-1)+kp4e(k)+kd[4e(k)-2e(k-1)+e(k-2)]
(3)當e(k) <M1時,說明誤差的絕對值很小,此時加入積分,減少穩態誤差,不加微分是為了減少噪聲的干擾:
u(k)=u(k-1)+kp5e(k)+ki5e(k)
3.2基于轉速的專家系統
基于轉速的專家系統是將不同轉速下的最佳PID參數、公式做成知識庫,系統運行時根據不同的轉速選擇合適的PID參數、公式進行控制,其實質是分段PID。
4 測試結果
4.1基于誤差的專家系統
根據上面基于誤差的專家系統,通過不斷地嘗試可得到以下的PID參數:
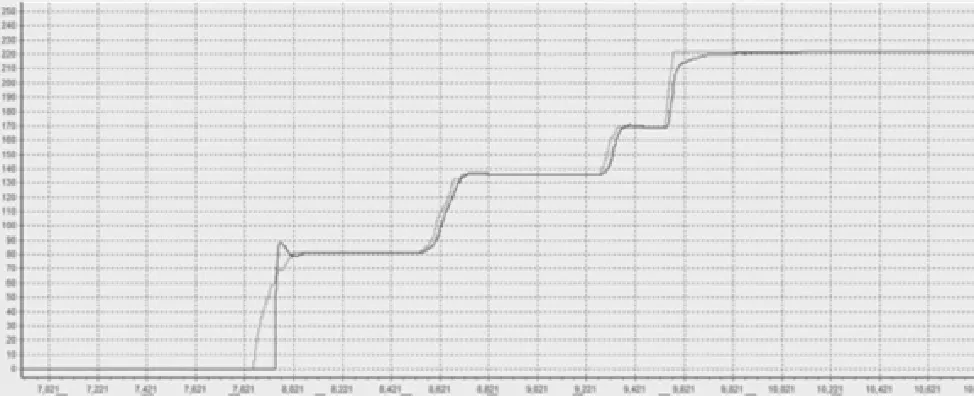
圖5 基于誤差的專家系統對不同目標值的響應曲線
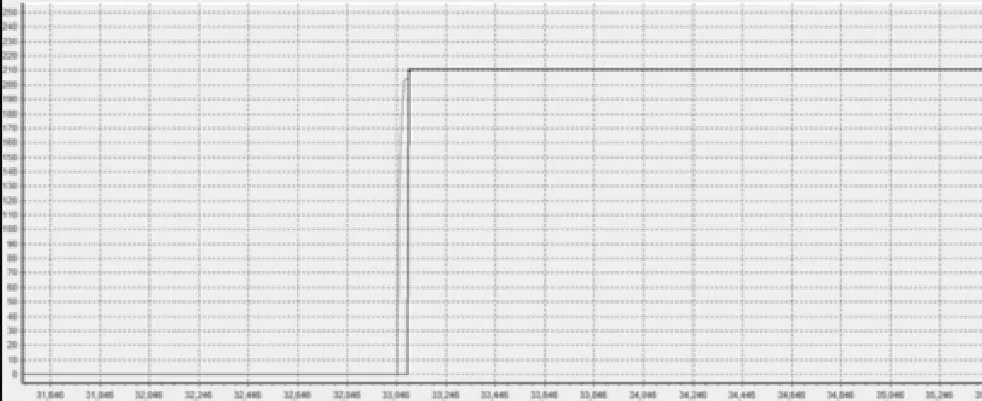
圖6 基于誤差的專家系統對大目標值的階躍響應曲線
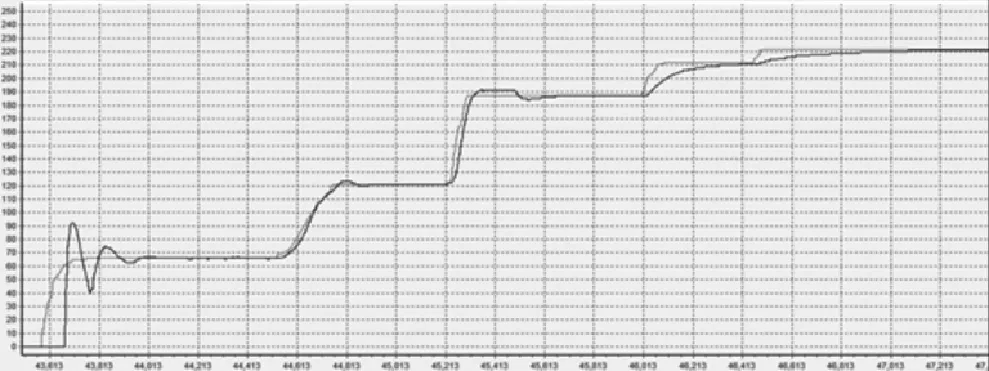
圖7 基于轉速的專家系統對不同目標值的響應曲線
kp4=0.8,ki4=0.01,kd4=0
kp5=0.5,ki5=0.02,kd5=0
4.2基于轉速的專家系統
可將轉速簡單地分為以下四段:0≤v<80:kp1=0.4,ki1=0.02,kd1=0 80≤v<120:kp2=0.5,ki2=0.025,kd2=0 120≤v<180:kp3=0.6,ki3=0.028,kd3=0 180≤v<230:kp4=0.8,ki4=0.01,kd4=0
5 結束語
利用經驗法整定出不同轉速v下的PID參數表,通過當前轉速來查表獲得最佳PID參數。實驗中每一個速度段對應的PID控制器結構都是同一個增量式PID,控制時僅改變PID參數,如果優化PID結構,控制器能達到更好的效果。實驗得到的對目標值和大目標值的響應曲線,經過專家系統后,PID控制在不同的目標值下都能實現較好的目標跟隨,而且對大信號的階躍響應超調非常小。
在控制對象有很大的時變性和非線性的情況下,一組整定好的PID參數遠遠不能滿足系統的要求。從實驗的結果來看,專家PID控制器能夠根據知識庫在線整定參數,對被控對象的時滯、非線性和時變性[8、9、11]具有一定的適應能力,同時魯棒性較好,具有相對較好的控制效果。
參考文獻:
[1]管于球.直流無刷電機控制系統的研究與設計[D].中南大學,2013.
[2]曹彬.數字式PID控制算法在直流無刷電機中的應用[J].江蘇電器,2007,增刊:16-18.
[3]劉軍.原子教你玩STM32[M].北京:航空航天出版社,2013.
[4]Debjyoti Chowdhury,Madhurima Chattopadhyay,Priyanka Roy.Modelling and simulation of cost effective sensorless driveforbrushlessDCmotor[J].ProcediaTechnology,2013,10:279-286.
[5]Li Chun-lai,Li Wen,Li Fu-dong.Chaos induced in brushless DC motor via current time-delayed feedback[J].Optik-International Journal for Light and Electron Optics,2014,125(21):6589-6593.
[6]陳伯時.電力拖動自動控制系統(第3版)[M].北京:機械工業出版社,2003.
[7]陶永華.新型PID控制及其應用[M].北京:機械工業出版社,2000.
[8]劉建偉.專家控制系統研究進展[J].微機與應用,2005,(11):4-19.
[9]王耀南.智能控制系統(第2版)[M].長沙:湖南大學出版社,2006.
[10]李名慧.智能PID控制器的設計和應用[D].天津大學,2006.
[11]KuoChung-feng,Tu Hung-min.Anentirestrategyforcontrol of a calender roller system,Part III:Intelligent settlingtimeoptimal control[J].Textile Research Journal,2008,78(1):81-87.
中圖分類號:TP273+.1
文獻標識碼:A
文章編號:1005—7277(2015)04—0014—03
收稿日期:2015-01-05
Brushless DC motor control system based on expert PID
ZHANG Hao,WU Xin-kai
(College of Information&Electrical Engineering,Hunan University of
Science and Technology,Xiangtan 411201,China)
Abstract:The brushless DC motor has the characteristics of time varing, nonliner, uncertainty and hardly modeling, so it is difficult to obtain ideal control effect by using conventional PID control. It is hoped to find a high-performance speed control scheme through the theory and practical research of expert PID. Based on the experiment platform of commonly used brushless motor speed control for multi rotor aircraft, the encoder is applied to measure the rotational speed and realize its closed-loop control. The introduction of brushless motor speed PID controller has opened up new ideas for motor control and attitude control of multi rotor aircraft. Key words:speed measurement of brushless DC motor;nonlinear;robustness;expert PID control
