波浪對(duì)水深測(cè)量測(cè)深精度影響分析
2015-07-05 13:45:18胡譯文陸偉
水道港口 2015年2期
胡譯文,陸偉
(天津水運(yùn)工程勘察設(shè)計(jì)院,天津300456)
波浪對(duì)水深測(cè)量測(cè)深精度影響分析
胡譯文,陸偉
(天津水運(yùn)工程勘察設(shè)計(jì)院,天津300456)
水深測(cè)量成果誤差包括平面定位誤差和測(cè)深誤差。文章建立測(cè)深換能器姿態(tài)變化與測(cè)量水深的相互關(guān)系數(shù)據(jù)模型,重點(diǎn)分析波浪對(duì)測(cè)深精度的影響,結(jié)合日常水運(yùn)工程項(xiàng)目的相關(guān)數(shù)值參數(shù),對(duì)該影響值進(jìn)行了量化模擬計(jì)算,為實(shí)際生產(chǎn)工作中水深測(cè)量數(shù)據(jù)后處理的消浪工作提供依據(jù)和參考。
海洋測(cè)繪;水深測(cè)量;測(cè)深精度;波浪;GPS高程
水深測(cè)量是以獲取水下地形數(shù)據(jù)為目的的海洋測(cè)繪技術(shù),目前主要手段是以船舶為載體,在以DGPS進(jìn)行定位數(shù)據(jù)采集同時(shí),以聲納原理進(jìn)行水深數(shù)據(jù)的獲取[1]。實(shí)踐表明,測(cè)深誤差主要體現(xiàn)為測(cè)深自身誤差與測(cè)量環(huán)境效應(yīng)誤差[2-4]。測(cè)深自身誤差如儀器誤差、動(dòng)吃水及聲速引起的誤差,測(cè)量環(huán)境效應(yīng)誤差包括波浪效應(yīng)、船速效應(yīng)等,其中波浪效應(yīng)是測(cè)深精度的最大環(huán)境影響因素[2-3]。
波浪對(duì)測(cè)深的影響,主要是指在測(cè)量過程中,造成測(cè)量船舶發(fā)生橫搖、縱搖以及豎直升沉等姿態(tài)改變,使水深測(cè)量換能器不能保持豎直狀態(tài)與豎向位置的相對(duì)固定,繼而影響測(cè)深平面定位與測(cè)深的準(zhǔn)確度[5]。介于波浪本身的特性,對(duì)測(cè)量數(shù)據(jù)中波浪的影響進(jìn)行消除是件不易的事,為減少波浪效應(yīng),規(guī)范要求在未使用姿態(tài)傳感器時(shí),沿海波高超過0.6 m時(shí)應(yīng)停止作業(yè)[6]。
1 數(shù)學(xué)模型演算
1.1 橫搖對(duì)測(cè)深精度影響
測(cè)量船舶橫搖主要對(duì)測(cè)深工作造成兩類影響,其一是引起換能器的上浮,其二是引起換能器發(fā)射波束偏離豎直方向。介于換能器的工作原理,在發(fā)射與接收聲波信號(hào)時(shí),具有一定的波束開角,不同品牌設(shè)備波束開角寬度略有不同,通常都在3°~10°。測(cè)量時(shí),換能器采集波束內(nèi)的最短距離作為水深值。因此,當(dāng)橫搖發(fā)生時(shí),換能器的波束開角能夠進(jìn)行自動(dòng)補(bǔ)償,當(dāng)橫傾角度小于波束開角時(shí),能完全消除波束偏離豎直方向所帶來的誤差;當(dāng)橫傾角大于波束開角時(shí),不能完全消除波束偏離豎直方面所帶來的誤差,但可以補(bǔ)償一個(gè)波束開角寬度。
如圖1所示,b為船舶搖晃中心(船舶重心)至換能器桿的垂直距離(通常為1/2船寬),l換能器為換能器位于船舶質(zhì)心以下深度,h水深為真實(shí)自然水深值,θ為換能器波束開角,h水深測(cè)為測(cè)量水深值。在假定換能器下方局部海底平坦的情況下,根據(jù)幾何關(guān)系不難確定,當(dāng)橫傾角小于波束開角時(shí),測(cè)深誤差體現(xiàn)為換能器上浮引發(fā)的誤差,其值為

當(dāng)橫傾角大于波束開角時(shí),測(cè)深誤差體現(xiàn)為兩類誤差矢量和,其值為

1.2縱搖對(duì)測(cè)深精度影響
測(cè)量船舶縱搖與橫搖類似,同樣對(duì)測(cè)深工作造成上述的兩類影響。如圖2所示,根據(jù)幾何關(guān)系同樣可推算出以下測(cè)深誤差公式(各參數(shù)與圖1表達(dá)一致)。
當(dāng)縱傾角小于波束開角時(shí),測(cè)深誤差體現(xiàn)為換能器上浮引發(fā)的誤差,其值為

當(dāng)縱傾角大于波束開角時(shí),測(cè)深誤差體現(xiàn)為兩類誤差矢量和,其值為

1.3 豎直升沉對(duì)測(cè)深精度影響
水深測(cè)量時(shí),換能器是固定在測(cè)量船舶上的,兩者的相對(duì)關(guān)系是固定不變的。船舶隨著波浪的起伏而升沉,所測(cè)水深數(shù)據(jù)也隨之發(fā)生相同變化[7],與船舶尺寸、水深值等任何參數(shù)無關(guān),浪高引發(fā)的船舶升沉量是其唯一因素,如圖3所示。其計(jì)算公式為

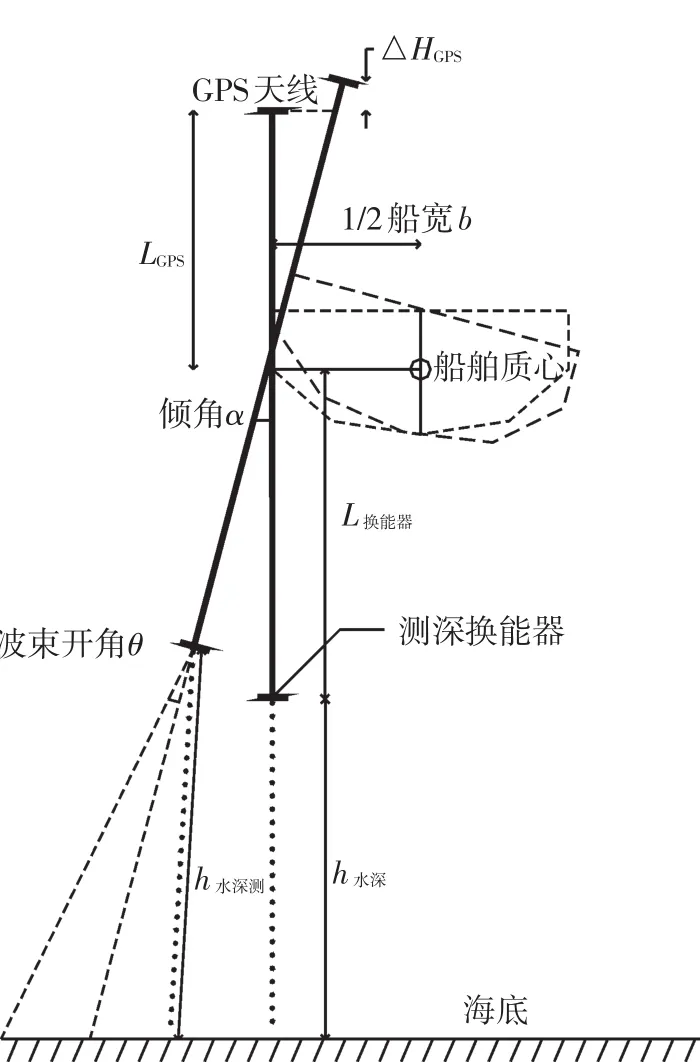
圖1 橫搖對(duì)測(cè)深影響Fig.1 Rolling impact on sounding
2 數(shù)值計(jì)算分析
結(jié)合水運(yùn)工程水深測(cè)量工作,在此對(duì)橫搖、縱搖模型中的主要影響因子進(jìn)行函數(shù)過程曲線分析,豎直升沉引發(fā)測(cè)深誤差為簡(jiǎn)單線性模型,暫不作詳細(xì)研討。
以O(shè)dom水深測(cè)量系統(tǒng)SMBB200?9高頻換能器為例,其波束開角為9°,假定b=1.5 m,分別針對(duì)5 m、10 m、15 m、 20 m、25 m水深條件,繪制橫搖、縱搖情況下測(cè)深誤差關(guān)于自變量?jī)A角的函數(shù)曲線如圖4、圖5所示。
圖4和圖5表明,在傾角小于12°時(shí)(略大于波束開角),測(cè)深誤差與傾角相關(guān),且基本呈線性,量值較小;當(dāng)傾角大于12°時(shí),無論是傾角還是水深值的加大,都將引起測(cè)深誤差的急劇加大;在同樣自變量情況下,橫搖的誤差效應(yīng)明顯大于縱搖誤差效應(yīng)。
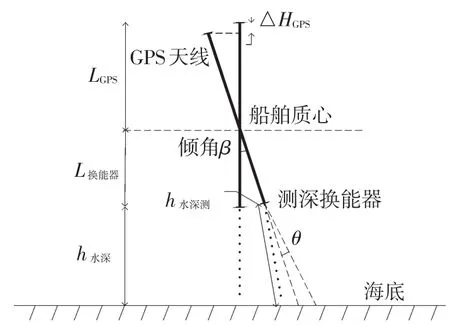
圖2 縱搖對(duì)測(cè)深影響Fig.2 Pitching impact on sounding
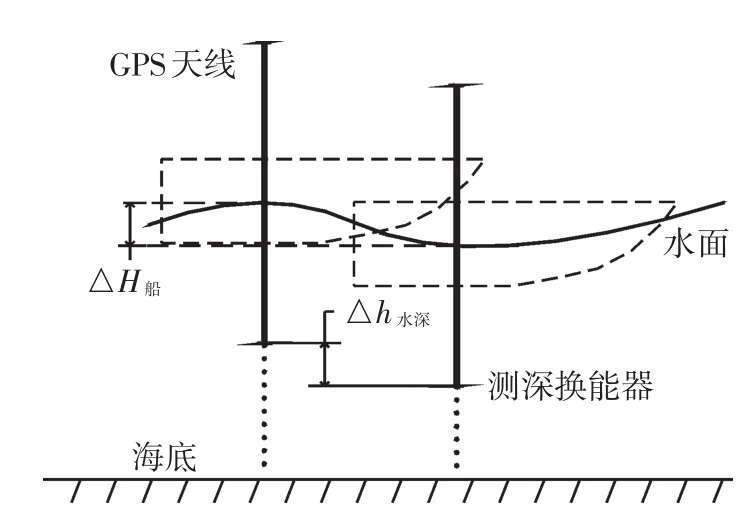
圖3 豎起升沉對(duì)測(cè)深影響Fig.3 Lifting impact on sounding
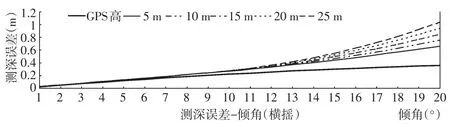
圖4 水深、傾角對(duì)測(cè)深誤差的影響結(jié)果(橫搖)Fig.4 Impact of water depth and dip angle on sounding(rolling)
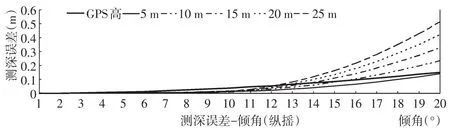
圖5 水深、傾角對(duì)測(cè)深誤差的影響結(jié)果(縱搖)Fig.5 Impact of water depth and dip angle on sounding(pitching)
3 工程實(shí)踐啟示
上述結(jié)論說明了在水深測(cè)量過程中,波浪對(duì)測(cè)深誤差的影響不容忽視。在使用姿態(tài)傳感器時(shí),應(yīng)根據(jù)所獲取的姿態(tài)變化角度對(duì)測(cè)深數(shù)據(jù)進(jìn)行深度修正,在未使用姿態(tài)傳感器時(shí),對(duì)測(cè)深數(shù)據(jù)對(duì)波浪效應(yīng)進(jìn)行消減(消浪)是非常有必要的。目前消浪采用的主要方法是根據(jù)模擬水深線進(jìn)行經(jīng)驗(yàn)性判斷[8]。
根據(jù)上述研究,從圖1~圖3可以看出,波浪效應(yīng)所影響的不僅是測(cè)深值,同時(shí)對(duì)GPS高程數(shù)據(jù)也同樣存在影響,并且不難推算GPS高程數(shù)據(jù)誤差公式。
式中:lGPS為GPS天線相位中心至搖晃中心的高度,式(3)表明對(duì)于豎直升沉,GPS測(cè)高誤差與測(cè)深誤差相同。當(dāng)lGPS取值2.5 m時(shí),GPS高程誤差隨橫搖、縱搖傾角的變化如圖4、圖5中粗線條,結(jié)果說明在傾角小于12°時(shí),GPS高程誤差量值與測(cè)深誤差量值相差不大。
基于此,在實(shí)際工作中,以GPS高程變化曲線作為參考來實(shí)施水深數(shù)據(jù)的消浪工作是可行的。即如圖6、圖7所示,上邊曲線為GPS高程,下邊曲線為測(cè)水深,將GPS高程經(jīng)常量平移后與水深值進(jìn)行比較,圖6中很明顯可以看出,GPS高程與水深值變化基本同步,由此基本可以判定該段水深值的起伏變化是由波浪引起的,可以參考GPS高程變化來平滑調(diào)整水深曲線,達(dá)到消浪效果。而圖7中,GPS高程值穩(wěn)定,可排除波浪因素的存在,對(duì)應(yīng)時(shí)間段的水深值變化是由于其他因素引起,對(duì)變化異常地方不應(yīng)當(dāng)成波浪效應(yīng)而被消減。
另外,根據(jù)圖4、圖5可以看出,無論是橫搖還是縱搖,當(dāng)傾角不足15°~16°時(shí)(大于波束開角6°~7°),測(cè)深值變化與GPS高程值變化之差均不超過0.2 m。結(jié)合GPS高程變化趨勢(shì),經(jīng)驗(yàn)性地削除波峰1/3~1/2的消浪方法,即使不使用姿態(tài)傳感器也可以保證波浪引起的測(cè)深誤差在0.1 m以內(nèi)。當(dāng)傾角超過該值時(shí),GPS高程的變化也不能完全反映出波浪對(duì)測(cè)深值的影響量值,此時(shí)如未使用姿態(tài)傳感器時(shí),將無法保證測(cè)深數(shù)據(jù)的準(zhǔn)確性。
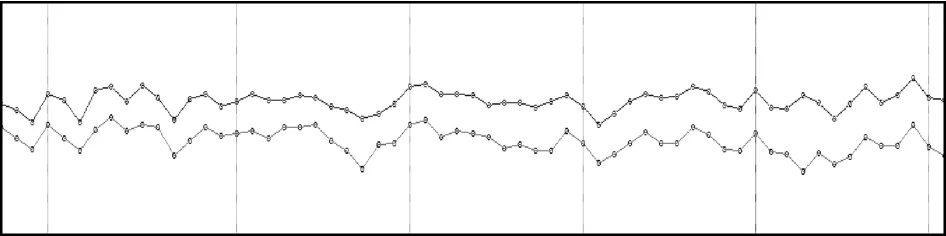
圖6 水深與GPS高程變化對(duì)比(有波浪影響)Fig.6 Comparison of the changes of water depth and GPS elevation(with wave effect)
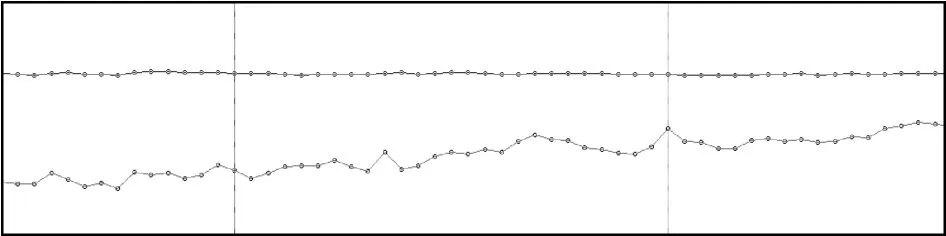
圖7 水深與GPS高程變化對(duì)比(無波浪影響)Fig.7 Comparison of the changes of water depth and GPS elevation(without wave effect)
4 結(jié)論
數(shù)據(jù)分析表明,波浪對(duì)水深測(cè)量測(cè)深精度影響較大,在測(cè)量過程中應(yīng)盡量選擇合適天氣、穩(wěn)重船只,并盡量配備姿態(tài)傳感器進(jìn)行姿態(tài)補(bǔ)償與修正,以消減波浪造成的測(cè)深誤差。在未使用姿態(tài)傳感器情況下,船舶搖晃傾角較小時(shí),數(shù)據(jù)后處理階段以GPS高程數(shù)據(jù)為參考進(jìn)行消浪的方法是準(zhǔn)確可行的。
[1]趙建虎,張紅梅.水下地形測(cè)量技術(shù)探討[J].測(cè)繪信息與工程,1999(4):22-26.
[2]林琿,吳立新,方兆寶,等.水深測(cè)量的誤差因子分析[J].海洋測(cè)繪,2005(2):1-5. LIN H,WU L X,F(xiàn)ANG Z B,et al.Analysis for error factor in sounding[J].Hydrographic Surveying and Charting,2005(2):1-5.
[3]陳鐵鑫,張堅(jiān)樑,張沈陽(yáng),等.卡爾曼濾波模型在水深測(cè)量中的應(yīng)用[J].浙江水利科技,2007(2):37-38.
[4]褚宏憲,周小明,史慧杰,等.水深測(cè)量誤差分析與改正[J].物探與化探,2011(3):358-363. CHU H X,ZHOU X M,SHI H J,et al.The analysis and correction of errors in bathymetric survey[J].Geophysical&Geochemical exploration,2011(3):358-363.
[5]黃建明.淺析高精度的水下地形測(cè)量解決方案[J].江西測(cè)繪,2005(3):48-51.
[6]JTS131-2012,水運(yùn)工程測(cè)量規(guī)范[S].
[7]丁繼勝,劉忠臣,周興華,等.利用姿態(tài)傳感器提高單波束測(cè)深精度[J].海洋測(cè)繪,2002(9):58-62.
[8]嚴(yán)天赦,張國(guó)全.船舶吃水對(duì)水深測(cè)量的影響淺析[J].港工技術(shù),2009(S1):70-71,74. YAN T S,ZHANG G Q.Analysis on Influence of Ship Draught on Water Depth Measuring[J].Port Engineering Technology,2009(S1):70-71,74.
天津港全面推廣岸電系統(tǒng)打造綠色港口
本刊從天津港集團(tuán)獲悉,天津港集團(tuán)作為全國(guó)綠色低碳四大港口試點(diǎn)之一,港口岸電技術(shù)已成為節(jié)能減排降噪的有效措施。據(jù)統(tǒng)計(jì),2013年至今,天津港集團(tuán)投資2.56億元完成了132臺(tái)集裝箱場(chǎng)橋油改電項(xiàng)目,每年可減少排放3.37萬t二氧化碳、0.1萬t二氧化硫、0.05萬t氮氧化物。在此期間,完成了36座低壓岸電裝置建設(shè),實(shí)現(xiàn)了所有港作船舶停靠期間岸基供電。同時(shí),從2014年初,天津港太平洋國(guó)際集裝箱碼頭公司還先后建造了兩座6.6 kVA 60 Hz高壓岸電裝置,全年可為162艘來港集裝箱船舶提供岸電供應(yīng),可實(shí)現(xiàn)替代燃油1 290 t,減排二氧化碳4 079 t。目前供電裝置已進(jìn)入調(diào)試階段,預(yù)計(jì)2015年年內(nèi)可正式投入使用。(殷缶,梅深)
江西航道首套自動(dòng)水位監(jiān)測(cè)采集系統(tǒng)投用
本刊從江西省港航管理局獲悉,日前,江西航道首套自動(dòng)水位監(jiān)測(cè)采集系統(tǒng)通過測(cè)試并完成驗(yàn)收,已正式投入使用。據(jù)了解,該系統(tǒng)是采用GSM無線通訊方式實(shí)時(shí)遙測(cè)水位變化的一種智能監(jiān)測(cè)系統(tǒng)。系統(tǒng)運(yùn)行時(shí),設(shè)在龍王廟大橋、八一大橋、昌邑山大橋3處觀測(cè)點(diǎn)的分站可以連續(xù)或定時(shí)自動(dòng)記錄(水位、溫度)傳感器發(fā)送的水位等數(shù)據(jù)變化情況,通過GSM無線通訊模塊將所測(cè)數(shù)據(jù)傳送至監(jiān)控中心主站,利用主站內(nèi)的“多參數(shù)水文處理軟件”進(jìn)行數(shù)據(jù)處理,生成各種報(bào)表,繪制水位(水壓)溫度變化圖等。該系統(tǒng)主要特點(diǎn)是功耗小、測(cè)量范圍大、操作簡(jiǎn)單、無人值守。傳感器能在河道水流不穩(wěn)定的情況下正常工作,儀器適應(yīng)在多變環(huán)境下全天候自動(dòng)工作,能夠滿足對(duì)贛江主要河段水位監(jiān)測(cè)要求。(殷缶,梅深)
Impact of wave on accuracy analysis of sounding
HU Yi?wen,LU Wei
(Tianjin Survey and Design Institute for Water Transport Engineering,Tianjin 300456,China)
The error of sounding consists both positioning error and bathymetric error.A numerical model of the relationship between the sounding transducer variation and the measurements of water depth was established in this paper.The impact of wave on the accuracy analysis of sounding was emphatically analyzed.Combining with the relevant numerical parameters in ordinary water transport project,the quantitative simulation of the impact value was carried out.The result provides the basis for the wave dissipation of the data processing for sounding.
hydrographic surveying and charting;sounding;depth accuracy;wave;GPS height
P 715;TV 143
A
1005-8443(2015)02-0172-04
2014-04-25;
2014-06-17
胡譯文(1986-),女,湖南省衡陽(yáng)人,助理工程師,主要從事大地測(cè)量、工程測(cè)量及海洋測(cè)繪工作。
Biography:HU Yi?wen(1986-),female,assistant engineer.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21