超高穩態加速度承載條件下轉子部件結構可靠性研究
2015-07-07 07:05:34李曉杰王成林賈美慧
制造業自動化 2015年2期
李曉杰,王成林,賈美慧
(北京物資學院,北京 101149)
0 引言
隨著航天、航空、生物、分析化學、高速加工等領域的迅速發展,機械裝置越來越多的在高加速度承載條件下運行,由于組成部件在承受高加速度載荷作用下其應力、應變、溫度、振動等方面特征改變,會導致組成部件功能失效,進而引發產品整體失去工作能力,因此目前對于產品在高加速度加載條件下使用特性分析和測試就尤為重要[1]。目前利用高速旋轉產生向心加速度進行加速度承載實驗是目前具備較強應用前景的新型實驗方法。其基本實驗原理及轉子部件模型俯視圖如圖1所示。

圖1 高加速度實驗系統原理簡圖及模型俯視圖
目前國內外根據不同的使用要求相繼研發了相關的實驗裝備,并已經在航天、生物等領域進行了廣泛的應用,針對此類設備的主要研究內容為:轉子系統的臨界轉速和穩態、瞬態響應計算;關于轉子系統運動穩定性的研究;轉子系統的優化設計和轉子的動平衡技術;軸承的動力特性;轉子系統的故障診斷;轉子的振動主控制;非線性轉子動力學等;轉子-軸承系統可靠性[2]。
綜合考慮目前的研究成果可知研究的重點側重整個旋轉傳動軸系的動態特性,對轉子部件本身的研究往往需要做出若干的簡化和假定,一般是簡化為具有一定質量、剛度、阻尼特征值的剛體,忽略了轉子部件本身的研究[3],尤其制造過程中形成的系統靜態誤差在工況參數影響下演變為系統動態誤差,并對系統運行產生影響,特別是對具有精密配合關系、受到強應力作用、產生較大應變的轉子部件的動態特性影響更為顯著,而目前此類研究還未深入開展。
本文對超高穩態加速度承載條件下轉子實驗設備的安裝孔結構,建立力學模型,綜合評價誤差對轉子部件結構可靠性的影響。
1 轉子部件建模與結構力學特性分析
根據公式 a =ω2·r可知,轉子部件的角速度值和回轉半徑共同決定了該設備的加速度應力場的強度。因此實驗對象的徑向變形具有非線性分布的特征,同時限元方法可以較精準的實現該問題的計算,因此本文將利用ANSYS建立轉子部件的三維實體計算模型,對其進行數值求解。根據已構建轉子部件模型,進行ANSYS建模,工作轉速為6303rad/s,轉子部件材料設定為TC4,轉子直徑設定為100mm,實驗對象安裝位置回轉半徑為35mm。在僅考慮離心場力載荷的情況下,簡化其受力模型,進行有限元模擬計算,轉子部件變形云圖如圖2所示。
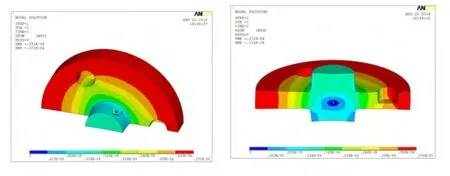
圖2 未集成裝配關系的轉子部件綜合變形云圖
此時加速度載荷值為1.53×106g(重力加速度值為g=9.8m/t2),轉子部件安裝孔處徑向最大變形量達到了0.082mm,安裝孔自下而上孔徑逐漸增大;接觸應力極值達到360MPa,小于設定材料的許用應力極值830MPa。
本文設定實驗對象材料為60SI2MnA鋼,其中心位置距回轉中心距離為35mm,實驗對象的直徑為12mm,高度為10mm,約束方式為徑向外側線約束。在僅考慮離心場力載荷的情況下,簡化其受力模型,進行有限元模擬計算,應力云圖如圖3所示。
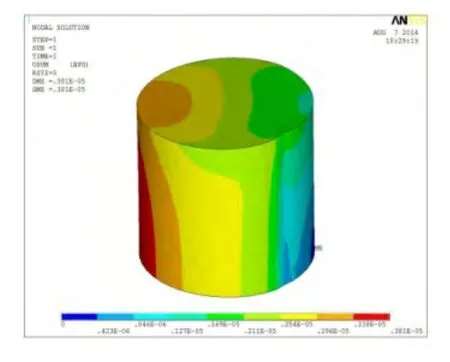
圖3 未集成裝配關系的實驗對象計算結果圖(外側半側面徑向約束)
根據計算結果徑向最大變形量達到了0.0839mm,接觸應力為890MPa,低于設定材料的許用應力極值1200MPa。對比實驗對象及轉子部件安裝孔結構變形量可知,在工作狀態下試驗對象徑向外側趨于的徑向變形大于對應的實驗托盤安裝孔處的變形。
根據研究成果得,小間隙配合為相對過渡和過盈配合效果更好的一種配合方式[4]。此時,實驗對象在工作狀態下徑向外側區域的變形量大于其對應的轉子部件安裝孔的徑向變形,二者之間的接觸條件也由線接觸過渡為面接觸配合。由于小角度斜面的存在會造成ANSYS計算結果出現較大誤差,因此將上圖案例模型進行適當簡化,從影響轉子部件應力與變形這兩項指標進行分析,建立具有集成裝配關系的轉子部件有限元計算模型,當間隙量取0.01mm時,轉子部件變形云圖如圖4所示。
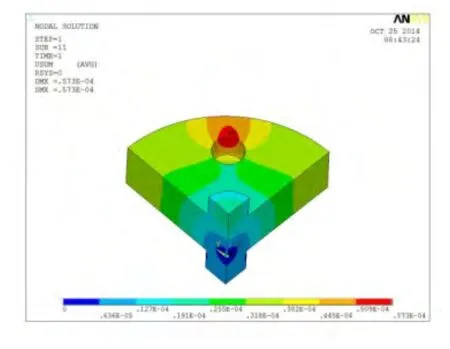
圖4 小間隙配合關系下轉子部件變形云圖
其中轉子部件與實驗對象的相對變形量構成了該設備安裝孔結構在工作狀態下的動態誤差,因此轉子部件的最大變形量DMAX1及實驗對象的最大變形量DMAX2即為隨機基本變量響應值,同時為極限狀態函數的目標變量。
基于人工神經網絡的極限狀態函數擬合分析
通過對轉子部件及實驗對象進行有限元計算分析后得到對其可靠性影響較大的參數如下,結構參數:安裝孔孔徑r1,實驗對象半徑r2,轉子部件厚度h1,安裝孔孔深h2,實驗對象高度h3;材料參數:轉子部件彈性模量E1,實驗對象彈性模量E2;工作參數:轉速v[5~7]。
經試驗測得各個隨機變量概率特性如表1所示。
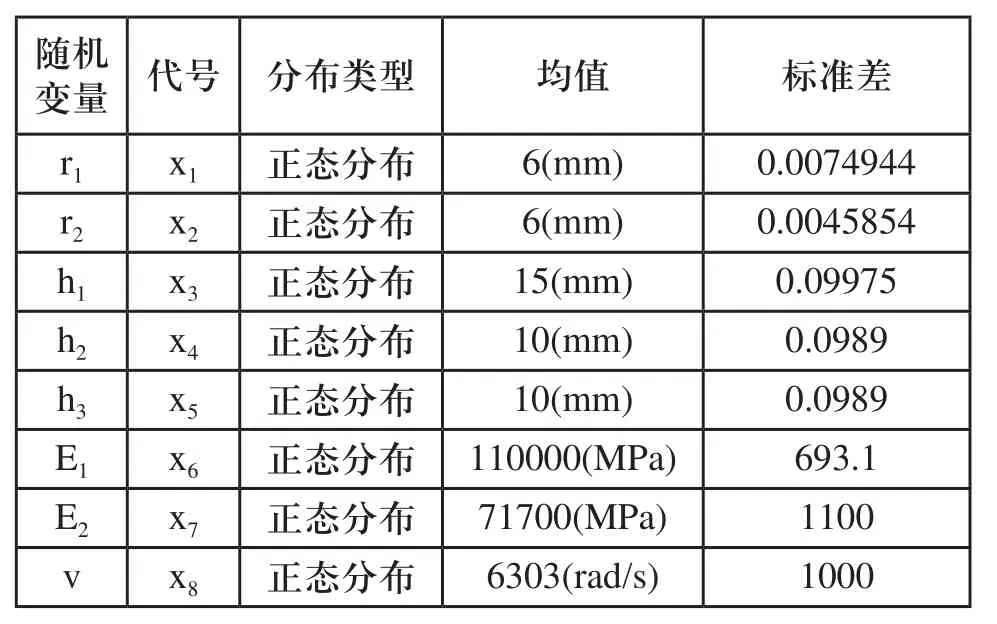
表1 隨機變量概率分析表
采用試驗設計方法中的超立方拉丁抽樣方法進行DOE試驗,試驗次數為100次,集成ANSYS有限元軟件得到隨機變量和響應的樣本值,響應的樣本值如圖5所示。其中DMAX1為實驗對象最大變形量,DMAX2為轉子部件安裝孔位置最大變形量,水平坐標為運算次數,單位為1,垂直坐標為響應值的,單位為m。
根據樣本點分別建立以DMAX1、DMAX2為輸出參數的多元二次回歸模型,隨機變量基本多元二次回歸模型為:
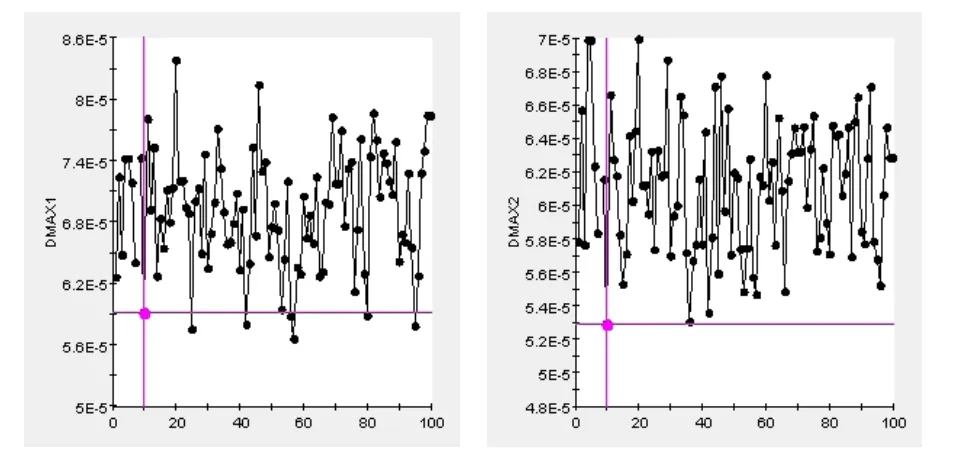
圖5 有限元計算的最大變形量分布圖

通過對樣本響應值進行分析可知,對于轉子部件的安裝孔位置處的變形量(DMAX2)可造成影響的主要因素為轉子部件彈性模量、轉速、實驗對象材料彈性模量;實驗對象高度、安裝孔深度、轉子部件厚度、實驗對象半徑,安裝孔半徑。
根據零件尺寸公差與尺寸鏈可以構成一個閉環的原理,實驗對象與轉子部件變形差狀態方程和可靠度R的表達式分別為:

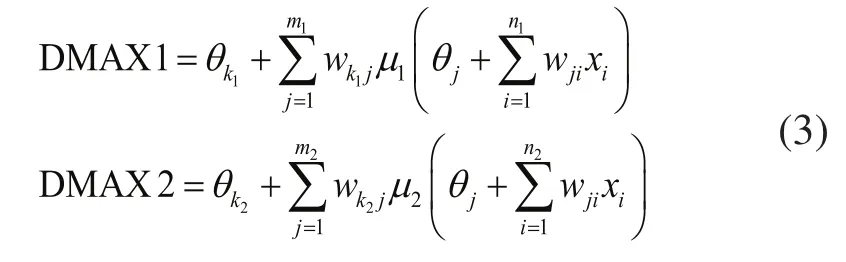
其中,通過μ1、μ2為轉子部件安裝孔附近最大變形量及實驗對象最大變形量,r3為安裝孔半徑,r4為實驗對象半徑,A為轉子部件與實驗對象裝配尺寸鏈。根據訓練樣本,分別建立以DMAX1,DMAX2為輸出的基于遺傳算法優化的神經網絡模型。則實驗對象的最大變形量(DMAX1)與隨機變量之間函數關系以及轉子部件的最大變形量(DMAX2)與隨機變量之間函數關系:
本文依據謝菲爾德大學遺傳算法工具箱構造基于遺傳算法優化的BP神經網絡模型[8]。定義種群大小為40,個體長度為10,代溝為0.95,交叉概率為0.7,變異概率為0.01,經過50次迭代,得到進化曲線,圖6為以DMAX1為輸出變量的模型進化曲線。
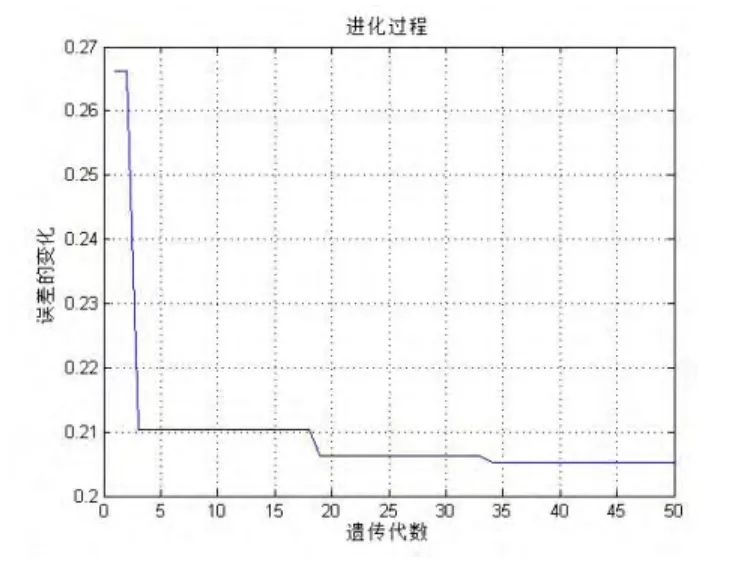
圖6 進化過程曲線
在經遺傳算法優化的初始權值和閾值的基礎上,經過反復訓練,使神經網絡得到的樣本十分接近DOE實驗有限元樣本響應,以DMAX1為輸出變量的神經網絡參數如表2所示。
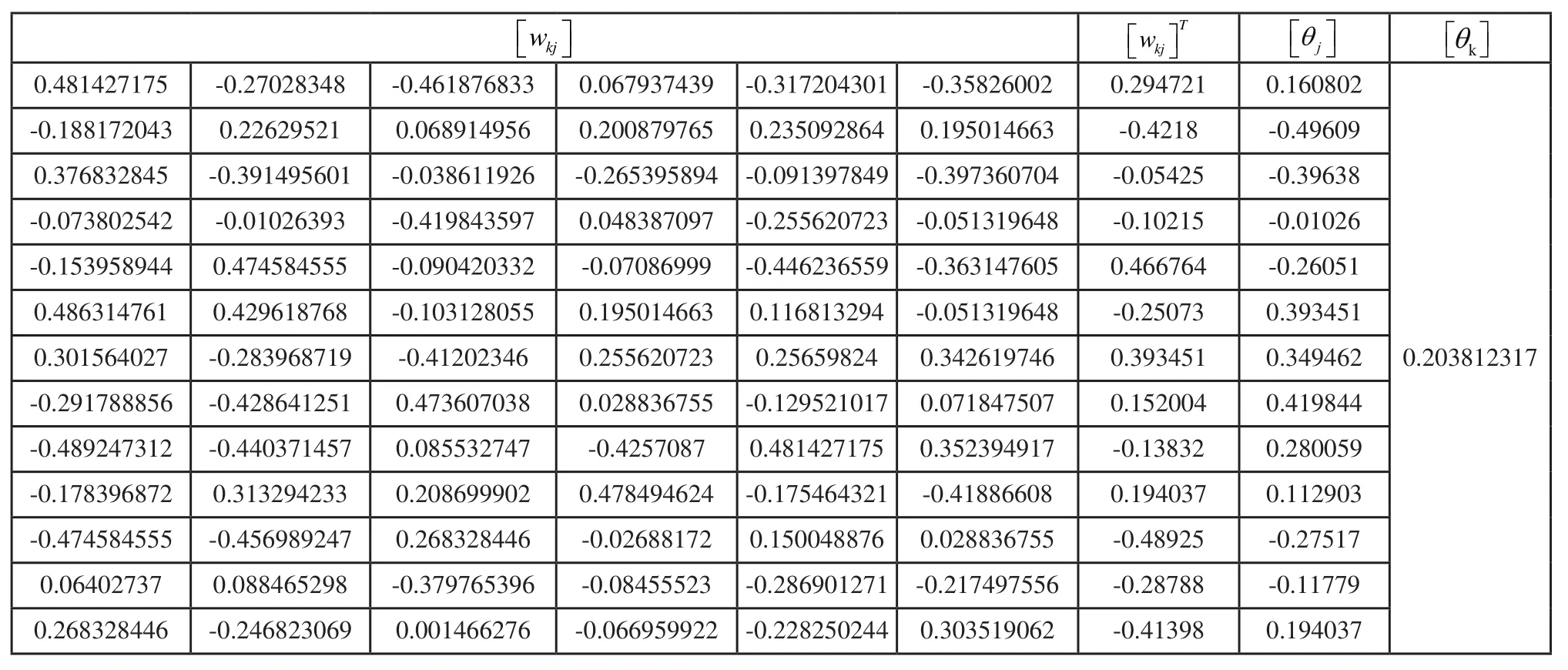
表2 訓練后的神經網絡參數
2 轉子部件結構可靠性分析
誤差在設計環節中根據公差限定初始范圍,制造過程中形成的結構靜態誤差在工況參數影響下演變為動態誤差,并對設備運行產生影響[9]。特別是對具有精密配合關系、受到強應力作用、產生較大應變的轉子部件的動態特性影響更為顯著,成為影響轉子結構可靠性的重要因素。
當轉子結構受到隨機激勵的作用下,定義動態誤差可靠度:

根據概率論相關知識,極限狀態函數的前四階矩為:
可靠性指標定義為:

其中,E(?)為期望值;μg、σg分別為狀態函數的均值和方差。
由于基本隨機變量均服從于正態分布,為簡化問題,動態誤差可靠度可以定義為在運動時域內,轉子部件動態誤差未超過許用誤差范圍的概率,即:

其中,F(-β)為關于-β概率分布函數的近似標準正態分布表達式。
為了得到動態誤差響應的統計特征,根據可靠性的攝動技術,動態誤差響應函數的前四階矩μs、σs、θs、ηs表示為:

式中,C3(?)、C4(?)表示三階中心矩和四階中心矩。
在已知基本隨機變量前四階矩的前提下,將式(4)帶入式(11)~式(14)得到隨機響應的前四階矩 μs、σs、θs、ηs,然后將式(11)~式(14)帶入式(5)~式(8),可以得到狀態函數的前四階矩 μs、σs、θs、ηs。根據式(10)可得到系統的動態誤差可靠度。
可靠度對基本隨機變量參數XT的均值靈敏度為:
通過以上公式即可計算得出轉子部件安裝孔結構動態誤差可靠度以及基本隨機變量的可靠性靈敏度。
3 轉子部件結構可靠度及可靠性靈敏度計算分析
由于轉子部件為實驗對象不具備替換性,因此在轉子部件與實驗對象構成裝配關系時,配合代號選擇基孔制的因為這種配合方式配合間隙較小,最小間隙為零的間隙定位配合較好的對準中心,一般多用于常拆卸場合,適合本案例工作要求。根據GB/T 1800.2-2009,孔直徑為12mm,公稱尺寸為H7的安裝孔尺寸:直徑為12mm,公稱尺寸為h6的實驗對象尺寸:。
裝配尺寸鏈計算公式為:
利用蒙特卡洛法驗算,在選定的轉子部件與實驗對象的配合關系情況下,通過iSIGHT軟件集成MATLAB和蒙特卡洛模擬模塊,進行蒙特卡洛模擬實驗,MATLAB輸出變量Y為因此設定時,針對變形這一可靠性評價指標來講轉子部件安裝孔是可靠的,其他隨機變量均值及方差保持不變,設定抽樣方式為描述抽樣500次。對實驗結果進行分析,輸出變量均值為0.0073226(mm),可靠度R1=0.884。本文方法與蒙特卡洛模擬法計算可靠度結果近似,誤差為5.65%,因此該方法的計算精度在可接受范圍內。通過計算結果可知,轉子部件安裝孔結構的動態誤差可靠度雖遠離可靠度臨界值但是仍可通過更改設計方案將其進一步提高,因此對基本隨機變量對轉子部件結構可靠度影響情況分析,計算隨機變量的均值可靠性靈敏度為:
結合可靠性和可靠性靈敏度相關理論,對轉子結構可靠度對基本隨即變量均值的靈敏度進行分析得實驗對象半徑r2,轉子部件厚度h2,實驗對象彈性模量E2,轉速v的均值增大,其結果將使結構可靠度增大,結構趨于安全(失效概率變小)。安裝孔孔徑r1,安裝孔孔深h2,實驗對象高度h3,轉子部件彈性模量E1的均值增大,其結構將使結構可靠度降低,結構趨于失效。
可靠度對基本隨機變量均值的靈敏度排序為,安裝孔孔徑r1,轉子部件厚度h1,實驗對象半徑r2,實驗對象彈性模量E2;實驗對象高度h3,安裝孔孔深h2,轉速v,轉子部件彈性模量E1。這個排序表明了這些參數的改變對轉子結構可靠度的影響程度。在產品設計、制造、使用過程中,應優先控制靈敏度排序靠前的隨機變量,可以較好的提高結構的可靠度。
4 結束語
本文基于人工神經網絡技術、隨機攝動技術、可靠性設計和可靠性靈敏度相關理論,分析了具有隨機參數的非線性轉機結構動態誤差,并對其可靠性進行了研究,給出了相應的計算方法,并對實際案例進行計算。通過與蒙特卡洛模擬法計算得出可靠度進行對比,該方法計算結果較準確,可以作為一般方法應用到此類問題的解決中。
應用本文方法能夠有效的反應各個隨機變量對其失效的影響程度,實現了對復雜非線性轉子結構的可靠性靈敏度求解。在工程實際中,轉子結構的結構參數和工況參數都十分復雜,本文方法具有通用、快速、有效的特點,使可靠性分析方法在工程實際中的應用更進一步。
[1]Shrawan Kumar,Yogesh Narayan,Tyler Amell.Role of awareness in head-neck acceleration in low velocity rearend impacts[J].Accident Analysis and Prevention,2000(32),233-241
[2]付汝輯.轉子動力學的現代發展狀況[J].機械強度,1980,04:10-26.
[3]韓清凱,于濤,俞建成,聞邦椿.單跨雙圓盤不平衡轉子一軸承系統的非線性動力學分析[J].機械工程學報,2004,40(4):16-20.
[4]王成林.一種適用于大轉動慣量固體的高加速度承載實驗裝置動態特性分析[J].制造業自動化,2012,07:84-89.
[5]張根保,王國強,何文輝,曾海峰.基于任務的數控機床可靠性分配技術研究[J].中國機械工程,2010,19:2269-2273.
[6]何明禮,向曉東,郭尹亮.基于重要度的系統可靠性分配方法[J].安全與環境工程,2009,04:62-65.
[7]梁震濤,陳建軍,胡太彬.星載天線展開機構系統可靠性分配的未確知方法[J].南京理工大學學報(自然科學版),2007,05:579-584.
[8]王赟松,許洪國.快速收斂的BP神經網絡算法[J].吉林大學學報(工學版),2003,04:79-84.
[9]金明杰,樓云江,劉冠峰,凌強.基于自適應動態碰撞檢測的工業機器人運動規劃算法研究[A].中國自動化學會控制理論專業委員會、中國系統工程學會.第三十一屆中國控制會議論文集C卷[C].中國自動化學會控制理論專業委員會、中國系統工程學會,2012:6.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
發明與創新(2016年38期)2016-08-22 03:02:52
