軸線角位移智能回轉支承的研究與探討
2015-07-10 12:33:58李眾
建筑機械化 2015年9期
關鍵詞:智能
李 眾
(馬鞍山方圓回轉支承股份公司,安徽 馬鞍山 243041)
軸線角位移智能回轉支承的研究與探討
李 眾
(馬鞍山方圓回轉支承股份公司,安徽 馬鞍山 243041)
從對目前回轉支承結構、功能分析,不能滿足特殊工況要求,提出軸線角位移智能回轉支承,并分析該回轉支承結構,闡明智能原理,拓寬了回轉支承的應用領域,為設計提供參考。
回轉支承;軸線角位移;鼓形齒;側隙;球形面
一般回轉支承是將一個轉動體安裝在回轉支承上;再把回轉支承和轉動體安裝在固定體上。這種結構形式回轉支承的使用,主要利用它來承載和轉動的;裝配后回轉支承是不能位移的。有些大型工程機械對回轉支承的要求,不僅能夠回轉,支承載荷,還需要回轉支承在安裝和使用過程中軸線可以角位移擺動。一般回轉支承不能滿足這種工況要求。
1 一般回轉支承結構
一般回轉支承結構如圖1所示,轉動體通過螺釘與回轉支承內圈聯結在一起;回轉支承外圈通過螺釘安裝在固定體上。這種回轉支承結構,回轉支承和轉動體只能實現轉動、承載,其軸線不能發生角位移,無法滿足特殊工況下大型工程機械對回轉支承的軸線可位移的要求。
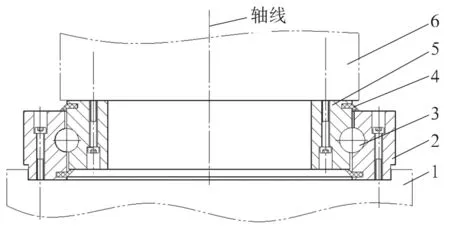
圖1 一般回轉支承結構圖
2 軸線角位移智能回轉支承結構
軸線角位移智能回轉支承結構如圖2所示。
鼓形齒外球形中圈、滾動體和隔離塊、內圈和密封帶組成了鼓形齒外球形回轉支承(圖3)。
內球形直齒下圈、內球形上圈和內六角螺釘、組成了內球形直齒外圈(圖4)。
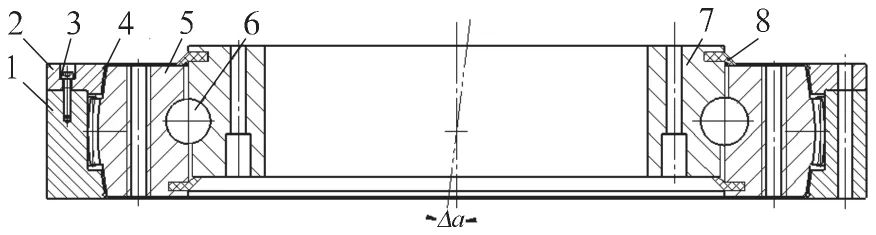
圖2 軸線角位移智能回轉支承
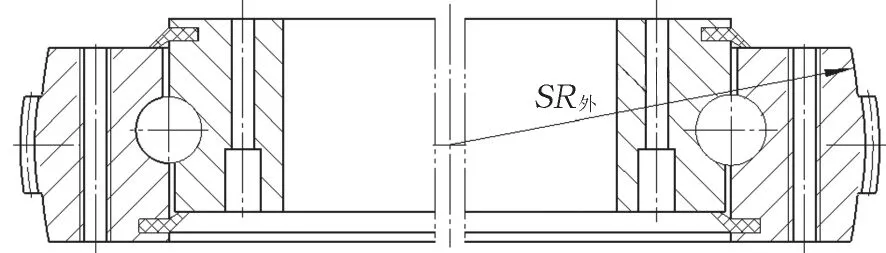
圖3 鼓形齒外球面回轉支承
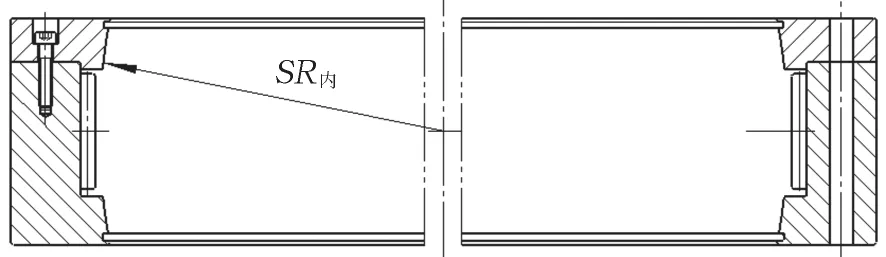
圖4 內球面直齒外圈
圖3鼓形齒外球形回轉支承的鼓形齒齒頂圓與內球形直齒外圈圖4上的直齒齒根圓采用間隙配合聯結定心;齒腔由2條O型密封圈密封。這樣裝配成本篇所要探討和研究而提出的軸線角位移智能回轉支承圖。
3 工作原理分析
由鼓形齒外球形回轉支承和內球形直齒外圈所組成軸線角位移智能回轉支承。其鼓形齒齒頂圓與內球形直齒外圈上的直齒齒根圓采用間隙配合聯結定心,由于鼓形齒在直齒內可以擺動,其擺動的角度Δa的大小,與齒側隙大小有關(圖5)。由此,鼓形齒外球形回轉支承的軸線隨鼓形齒擺動而發生角位移;并且在360°范圍內軸線可以實現角位移擺動。這樣,本研究和探討的軸線角位移智能回轉支承,不僅可以實現一般回轉支承的轉動、承載作用,還能夠在360°范圍內發生角位移擺動。
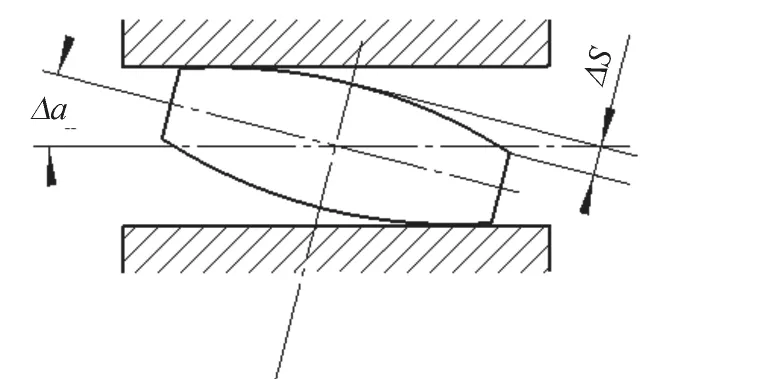
圖5 鼓形齒在直齒內的角位移
在實際使用本篇所探討和研究的軸線角位移智能回轉支承,主要是滿足特殊工況下工程機械整個長軸可以擺動的要求。如盾構和攪拌站中的螺旋輸送機,主轉動軸安裝在內圈上,動力頭外客和螺旋桿外客分別安裝在鼓形齒外球形中圈的兩個端面上,內球形直齒外圈安裝在固定的機架上,這樣,螺旋輸送機就可以在360°范圍內,軸線可以實現角位移擺動,遠離支點的出料口就可以由單點給料變成多點給料。這樣不僅提高了工作效率,還拓展了螺旋輸送機的功能。
4 主要參數研究
1)側隙 鼓形齒與直齒之間的間隙。經過實驗得出:擺動的角度Δa大小與鼓形齒和直齒之間側隙的大小有關,它們成正比例關系。側隙通過齒變位來求得,一般用于螺旋輸送機的側隙在1.5~3mm之間。
2)球面間間隙 內、外球面之間的間隙。經過多次試驗得出,間隙一般在0.3~0.5mm范圍內,它是由內球面半徑SR內-外球面半徑SR外求出的。
3)鼓形齒齒頂圓與直齒齒根圓間配合種類的選擇 經過多次試驗得出,比較適合的間隙配合種類為H9/f7。
4)齒的模數選擇 主要根據所要安裝的整機質量,算出載荷來確定模數的大小。對于攪拌站和盾構機中的螺旋輸送機,經過多次試驗得出,模數為6~8較合適,能達到承載和壽命的要求。
5)齒寬的確定 鼓形齒齒寬主要根據所要承載的載荷和壽命來確定,經過多次試驗得出計算公式為B=H/4-(0.1~0.18)H(鼓形齒齒圈高度),高度H值達到500mm以上,其值越大,系數就越大。
5 結 論
通過對一般回轉支承和軸線角位移智能回轉支承結構對比分析,對軸線角位移智能回轉支承工作原理探討以及經過多次試驗,得出軸線角位移智能回轉支承是能夠實現軸線角位移擺動的,是一種新型的智能回轉支承,拓展了回轉支承的使用范圍,也為特殊工況工程機械的設計提供了參考。
(編輯 于 洋)
Research and discussion on the axis angular displacement smart slewing bearing
LI Zhong
TH123
B
1001-1366(2015)09-0037-02
2015-07-29
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
